基于蟻群算法的機器人全局路徑規劃算法改進
2024-12-09 00:00:00姜炳輝
中國新技術新產品
2024年17期





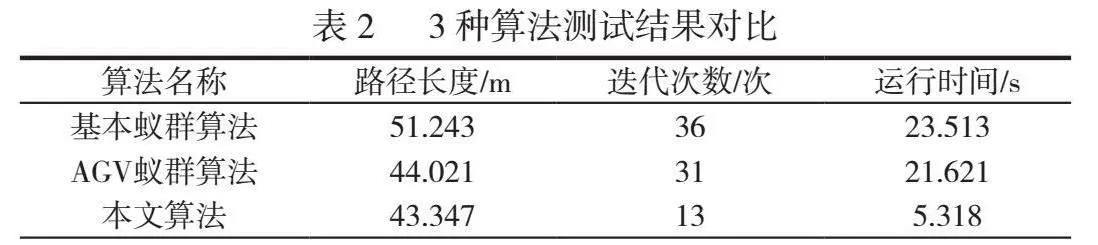

摘 要:為了解決在復雜環境中果園噴霧機器人全局路徑規劃效率不高的問題,本文提出一種新的路徑規劃算法。本算法利用蟻群算法的基本原理進行優化,引入高度矩陣對啟發函數進行優化。利用角度數評價函數、物數量評價函數等參數對信息素增量進行優化,在尋徑過程中更高效地躲避障礙物,避免進入死循環,同時減少迭代次數;設定信息素濃度值的最大值和最小值,可以避免算法早熟和停滯。本文進行對比測試,測試結果表明,與基本蟻群算法相比,使用本文算法,最優路徑減少7.896 m,迭代次數降低23次,運行時間減少18.195 s,環境越復雜,本文算法的優勢越明顯。
關鍵詞:復雜環境;果園機器人;路徑規劃;信息素增量
中圖分類號:TP 242" " " " " " " 文獻標志碼:A
水果產業在農業生產中的地位越來越重要[1]。為了減少果園生產管理的負擔,降低生產作業成本,使用果園噴霧機器人噴灑農藥可以降低人力成本[2]。國內外學者對路徑規劃領域研究越來越多,應用比較廣泛的路徑規劃方法有A*算法、DWA以及蟻群算法等。采用A*算法在一定程度上可以得到較好的路徑規劃,但是該算法存在拐點大、平滑性不足和運算時間長的問題。DWA算法可以對局部路徑進行規劃,避障效果很好,但是該算法存在局部最優死循環,會導致整個路徑規劃失敗。蟻群算法的基本原理是模擬螞蟻覓食的行為,對起點至終點進行路徑規劃[3]。蟻群算法的優點包括正反饋高、魯棒性強等,但是該算法的缺點是初期搜索效率不高,算法整體收斂速度慢,還存在局部最優解。……
登錄APP查看全文