無人機攝影測量網型對天線測量精度的影響
2024-12-09 00:00:00楊書輝鄧皎鵬
河南科技 2024年21期


摘 要:【目的】針對無人機攝影測量拍攝天線時精度低的問題,分析無人機攝影測量網型對精度的影響機理,并提出設計和優化網型的方法,以期提高測量的精度和效率。【方法】以拋物面天線為例,采用理論分析與實驗驗證相結合的方法,探究不同無人機攝影測量網型對天線測量精度的影響。【結果】實驗數據表明,增加攝站圈數能確保每個待測點滿足網型設計要求,可使其測量精度為最優,其中點位平均測量精度為0.067 mm。【結論】該研究成果揭示了無人機攝影測量網型對天線測量精度的影響顯著,為大型天線的無人機攝影測量網型設計提供科學依據和技術支撐,對促進天線行業技術創新具有重要意義。
關鍵詞:無人機;攝影測量;天線;測量網型
中圖分類號:P231 文獻標志碼:A 文章編號:1003-5168(2024)21-0017-06
DOI:10.19968/j.cnki.hnkj.1003-5168.2024.21.004
The Influence of UAV Photogrammetry Network on the Measurement Accuracy of Antenna
YANG Shuhui1,2 DENG Jiaopeng1,2
(1.The 39th Research Institute of China Electronics Technology Group Corporation, Xi'an 710065, China;
2. Shaanxi Key Laboratory of Antenna and Control Technology, Xi'an 710065, China)
Abstract: [Purposes] Aiming at the problem of low accuracy of UAV photogrammetry, the mechanism of the influence of UAV photogrammetry network on the accuracy is analyzed, and a method to design and optimize the network is proposed to improve the accuracy and efficiency. [Methods] Taking parabolic antenna as an example, this study combines theoretical analysis and experimental verification to explore the effects of different UAV photogrammetry network on the measurement accuracy of the antenna. [Findings] The experimental data show that increasing the number of camera stations can ensure that each point to be measured meets the requirements of the network design, and the measurement accuracy can be optimized. The average measurement accuracy of the point position is 0.067 mm. [Conclusions] The results of this study reveal the significant influence of UAV photogrammetry network on antenna measurement accuracy, which can provide scientific basis and technical support for the design of UAV photogrammetry network for large antennas, and is of great significance for promoting technological innovation in antenna industry.
Keywords: UAV; photogrammetry; antenna; photogrammetry network
0 引言
隨著我國航天工程與深空探測技術的快速發展,地面跟蹤天線作為接收航天器通信信息的關鍵設備,其設計口徑也越來越大,如天津武清站的70 m天線、在建的新疆奇臺縣110 m天線。天線的反射面是發射和接收電磁波信號的關鍵結構,主反射面精度直接決定了其自身性能和觀測效率,尤其是在高頻觀測時,微小的表面誤差將引起較大的增益損失[1]。在大型天線安裝過程中,日照、溫差、風載荷等因素均會導致天線結構產生不均勻的變化[2-3],使天線主反射面的測量結果不準確。因此,快速、高精度地完成天線主反射面精度測量,對大型天線的安裝具有重要意義。
目前,攝影測量法因具有檢測速度快、非接觸測量、適應性強等優勢而成為測量天線主反射面精度的主要手段[4-6]。近年來,隨著“低空經濟”被打造成戰略性新興產業,無人機技術得到迅速發展,將無人機攝影測量技術應用于天線主反射面精度測量成為一種新的發展趨勢。人工測量天線時不能預測拍攝點,需要在拍攝、處理數據后才能發現問題;無人機攝影測量可以預先規劃拍攝點,并分析其優劣,通過優化改進得到合理的網型布局后,即可借助無人機的定位系統,使無人機按照預期的路徑進行拍攝,從而保證測量結果的穩定性。
楊林華等[7]的研究結果表明,影響攝影測量精度的因素很多,但攝影測量網型是影響攝影測量精度的主要因素之一。無人機攝影測量網型指無人機所有拍攝點、待測點和攝影光線所形成的空間網絡。工程應用表明,在相同的測量環境中,使用同一測量設備和解算軟件,當攝影測量網型不同時,其測量結果也有差異,有時較差的網型甚至會導致測量結果不準確。目前,無人機攝影測量網型的選擇主要依賴于操作者的工程經驗。在拍攝大型天線時,由于對無人機攝影測量網型缺乏系統的科學研究,導致測量結果較差,需要通過多次增補拍照來彌補較差的網型,從而提高拍照效果。然而多次拍攝會增加采樣時間,天線的狀態也發生變化,難以得到準確的主反射面精度。因此,如何合理布置、優化無人機攝影測量網型,使無人機實現高效率、高精度的測量成為工程中亟待解決的問題。
本研究以拋物面天線為例,基于攝影測量原理對無人機攝影測量網型進行研究,采用理論分析和實驗驗證相結合的方式,對比不同無人機攝影測量網型的測量精度,為實現大型天線的主反射面精度測量提供技術支持。
1 無人機攝影測量原理
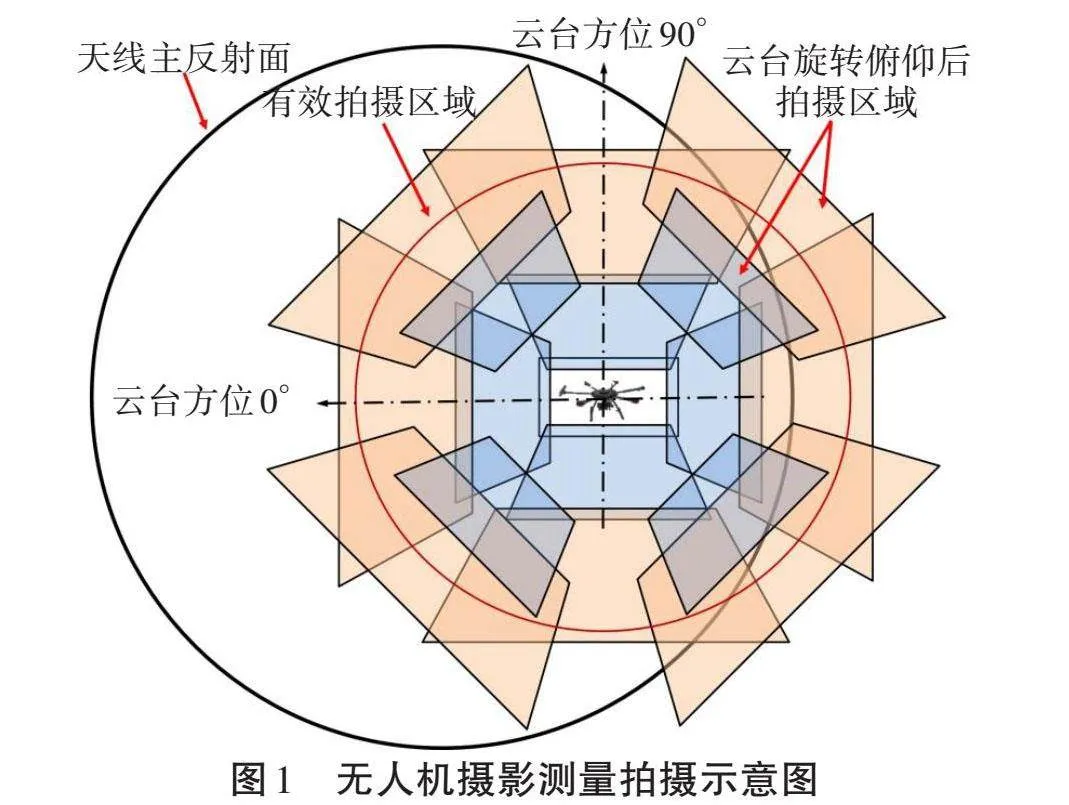
目前,無人機攝影測量相機大多采用固定角度的航拍方法。然而,由于拋物面天線為曲面形狀,為了使主反射面上的待測點具有良好的入射角度,需要根據無人機的位置、曲面斜率等來調整拍攝角度。因此,無人機上需安裝云臺以實現多個角度的拍攝,拍攝示意如圖1所示。
無人機攝影測量基本數學模型是共線方程,即物點P、鏡頭中心S、像點p位于同一直線上。當從多個攝站對目標進行拍攝時,可獲取被測物體的多個立體像對,從而構成多目立體視覺。設物方點Pi由j個攝站相交,如圖2所示,則共有j個共線方程。此外,由于實際成像時,主點的像平面坐標不嚴格為零和相機鏡頭畸變等干擾因素的存在,使得各像點在像平面上相對其理論位置(x,y)存在偏差([?]x,[?]y)。因此,實際像點的共線方程式可由式(1)計算得到[5,8-9]。
[xij?xoj+?xij=?fja1jXi?XSj+b1jYi?YSj+c1jZi?ZSja3jXi?XSj+b3jYi?YSj+c3jZi?ZSj][yij?yoj+?yij=?fja2jXi?XSj+b2jYi?YSj+c2jZi?ZSja3jXi?XSj+b3jYi?YSj+c3jZi?ZSj] (1)
式中:[xij]、[yij]為像點在像平面坐標系中的坐標;[xoj]、[yoj]為像主點在像平面坐標系中的坐標;f為相機焦距;[Xi]、[Yi]、[Zi]為物點Pi在物方坐標系中的坐標;[XS]、[YS]、[ZS]為鏡頭中心在物方坐標系中的坐標;[a]、[b]、[c]為像坐標系和物方坐標系間旋轉角函數。
2 網型設計原則
在對無人機攝影測量網型進行設計時,需要綜合現場的空間(副面、撐腿等)、相機的性能(視場角、景深等)和攝影標志對入射角度的限制等因素。對于拋物面天線,楊林華等[7]研究發現,采用環形網型比航帶網型更有利于提高測量精度。此外,環形網型可以靈活調整無人機飛行高度和半徑,避免與天線的副反射面、撐腿等結構發生碰撞。對于網型的設計,黃桂平[5]分別從待測點的被拍攝頻次、交會角、攝影入射角等方面提出了基本設計原則。考慮到目前回光反射材料的特性,即入射光線小于60°時,反光強度是漫反射的300倍以上[10],在此條件下,軟件能自動處理和識別出反光標。因此,本研究將上述原則進行綜合,并提出以下原則:①每個待測點的入射角小于60°;②待測點至少被四個不同位置攝站拍攝;③盡可能使待測點交會角為60°~120°。
現有的網型設計原則為天線測量提供了技術框架,但對如何具體設計和優化無人機攝影測量網型以提高天線的測量精度,目前尚未有充分的研究。針對這一研究空白,本研究聚焦于拋物面天線,詳細闡述無人機攝影測量網型的布置和優化策略,采用理論分析和實驗驗證相結合的方法,深入探討無人機攝影測量網型對天線測量精度的具體影響。
3 網型設計及優化策略
在設計無人機攝影測量網型時,先在反射面上方布置一圈基礎攝站,計算待測點的拍攝頻次和交會角,以評估是否滿足網型設計原則。若不符合,則考慮增加攝站圈數或者增加攝站數量。此處以增加攝站圈數為例,在基礎攝站的內側或外側增加一圈攝站,然后計算待測點的拍攝頻次和交會角,并進行評估,直至待測點均滿足網型設計原則。
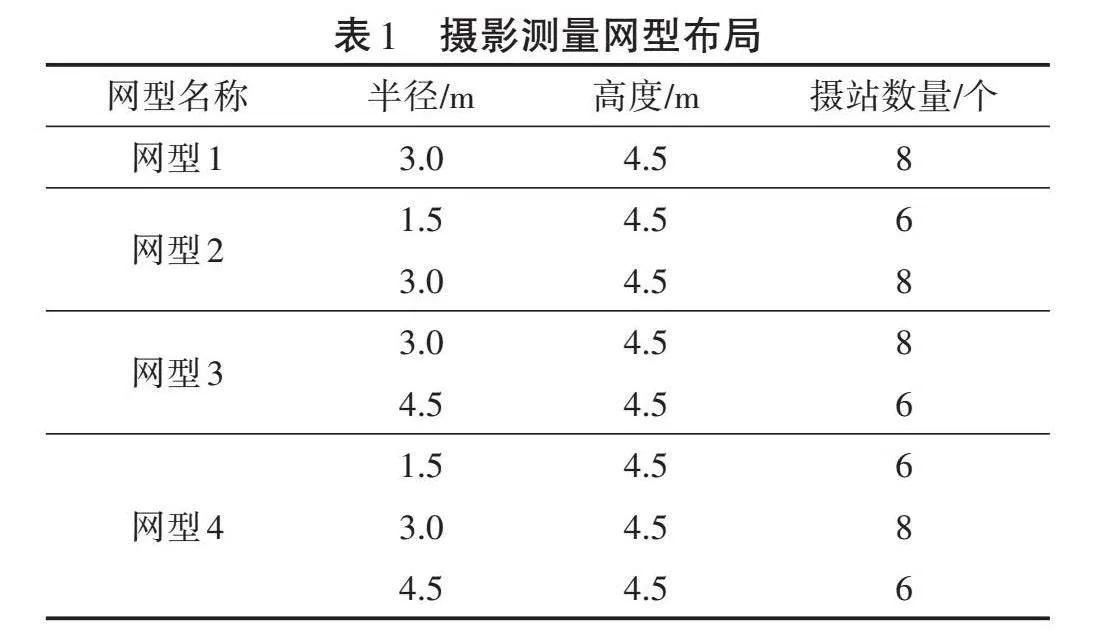
本研究選取12 m口徑天線作為研究對象,同時在距離反射面中心1.5 m、3.0 m、4.5 m和6.0 m的位置,選取四個待測點用于理論分析。遵循上述網型設計和優化策略,布置了四種無人機攝影測量網型,詳細的網型參數見表1。
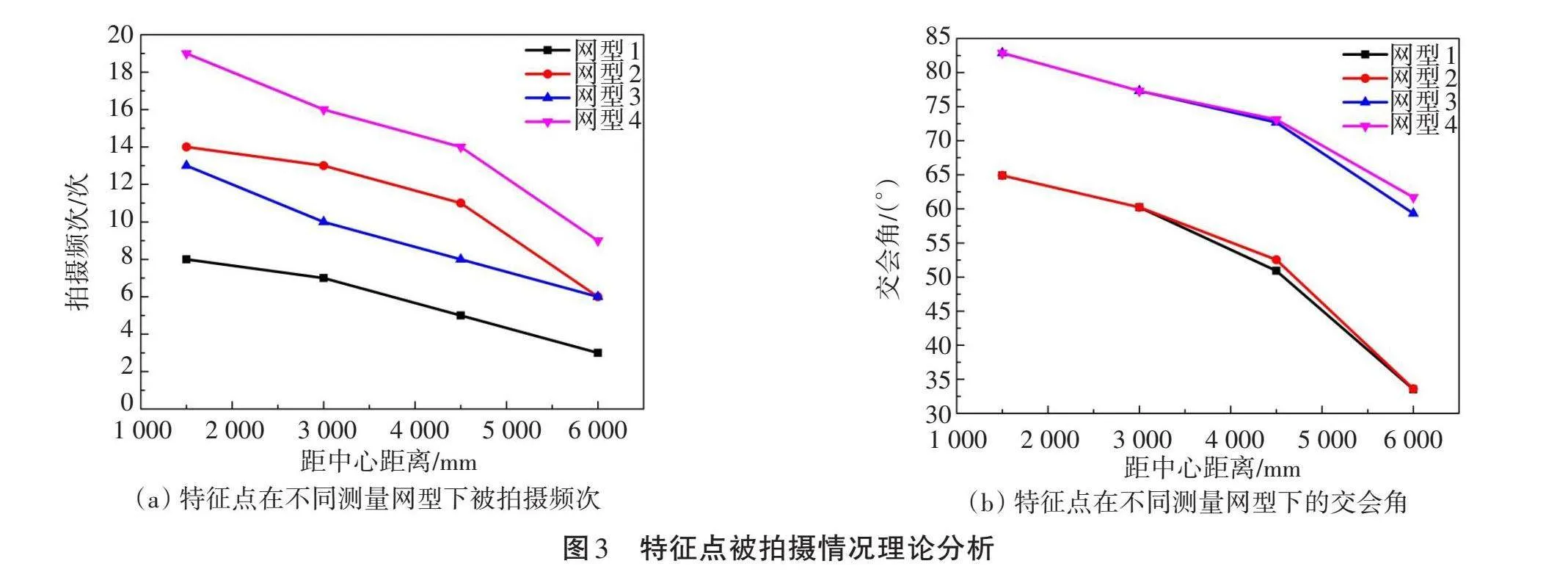
圖3詳細展示了四種無人機攝影測量網型布置過程中的理論計算結果,揭示了每種網型下待測點的拍攝頻次和交會角。通過對比分析網型的攝站參數,可以得到其在提高天線測量精度方面的不同效果,并得出以下結論。
①在同一網型結構下,不同位置待測點被拍攝的頻次和交會角不同。
②在不同網型結構下,同一待測點被拍攝頻次和交會角也不同。
③對比網型1、網型2和網型3后可知,增加攝站圈數和數量,能使待測點被拍攝頻次增加;交會角度是否增加,則取決于新增攝站的位置。
④網型3和網型4對比可知,在內圈增加攝站,交會角增加幅度不顯著,而被拍攝頻次卻顯著增加。
⑤待測點越靠近邊緣區域,其被拍攝頻次及交會角越小。
由圖3可知,位于天線主反射面6 m處的待測點,在四種不同的測量網型下的拍攝頻次分別為3次、6次、6次、9次,對應的交會角分別為33.5°、33.6°、59.3°和60.0°。這些數據揭示了不同網型對測量精度的潛在影響,較低的拍攝頻次和較小的交會角(尤其是33.5°和33.6°)是由于天線主反射面邊緣區域的曲面斜率較大及攝站與待測點之間的距離較遠所致的。此外,較大的交會角(如59.3°和60.0°)表明,某些網型設計能更好地覆蓋邊緣區域,從而提高測量的準確性和可靠性。這些觀察結果強調了在設計無人機攝影測量網型時,需要綜合考慮天線的幾何特性和攝站布局,從而實現最佳的測量效果。
4 實驗驗證
4.1 實驗概況
在進行測量實驗前,需要對天線進行預處理。首先,在天線的每塊面板上粘貼3 mm反光標,作為待測點的標識;其次,在主反射面上均勻布置120個3 mm的編碼標(用于匹配相片)。用于測量的相機的畫幅為23.5 mm×15.6 mm、像素為6 000 px×4 000 px、焦距為20 mm。在拍攝過程中,為了保證測量的覆蓋率,相機在相同方位角度下以45%的相片重疊率進行俯仰拍攝。
4.2 實驗拍攝結果
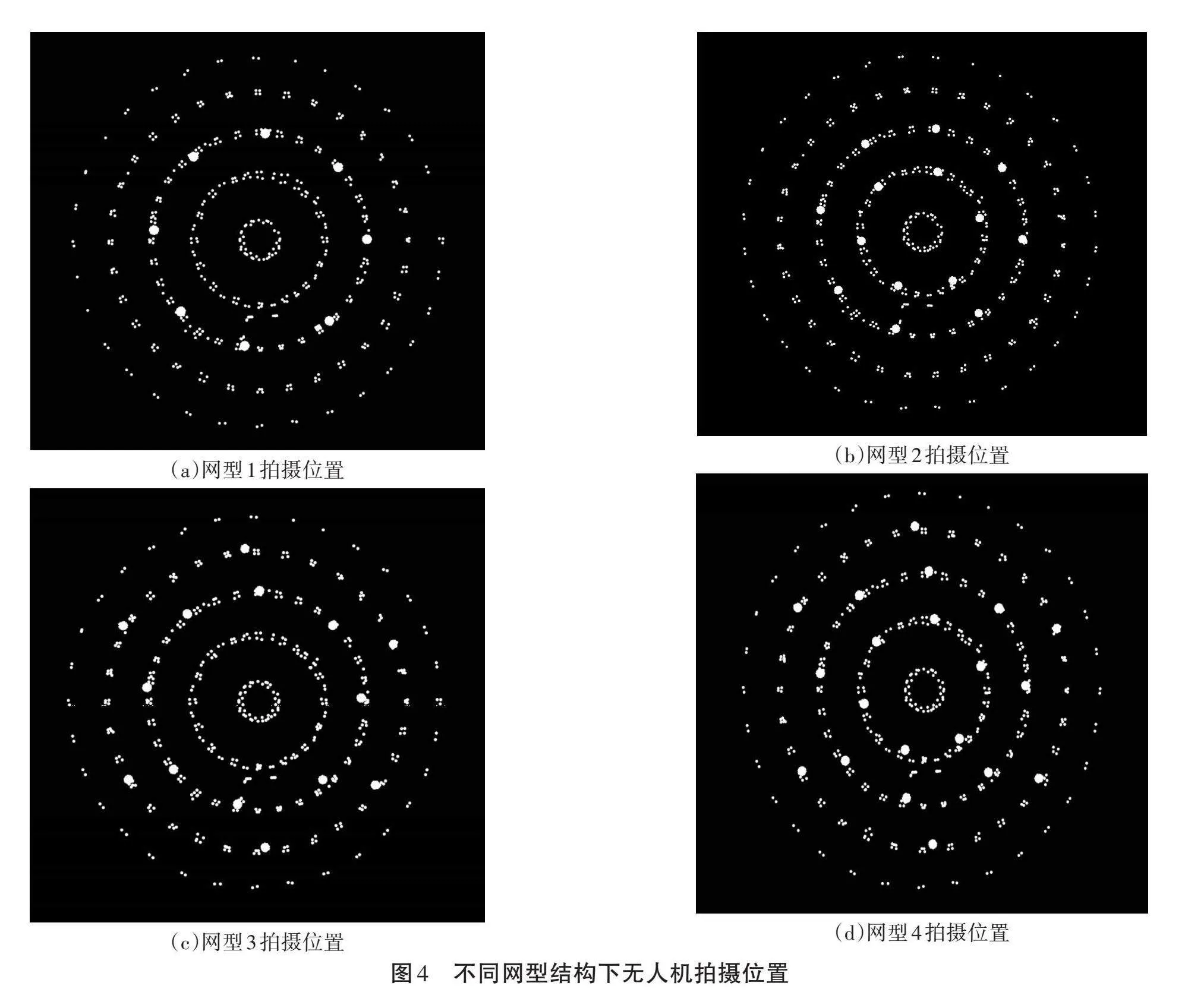
根據表1中提供的無人機攝影測量網型參數,對天線主反射面進行拍攝測量,在四種不同網型下,無人機的拍攝位置如圖4所示。根據各網型的拍攝結果,對其進行分析,具體如下:圖4 (a)表明,在網型1的拍攝中,天線主反射面的最邊緣區域存在部分待測點未能被成功拍攝,這是因為邊緣待測點拍攝頻次低、交會角度小,導致在數據處理過程中的測量誤差較大,從而被識別為異常點,并予以剔除;圖4 (b)、(c)、(d) 表明,其余三種網型均能成功拍攝主反射面上的所有待測點,表明這些網型在設計上更有效地覆蓋了整個測量區域,確保了所有待測點都能被多次拍攝,從而提高了測量的完整性和準確性。結果表明,在無人機攝影測量網型設計中,通過優化攝站的位置和數量,能有效減少測量誤差,提高數據的可靠性。
4.3 測量精度
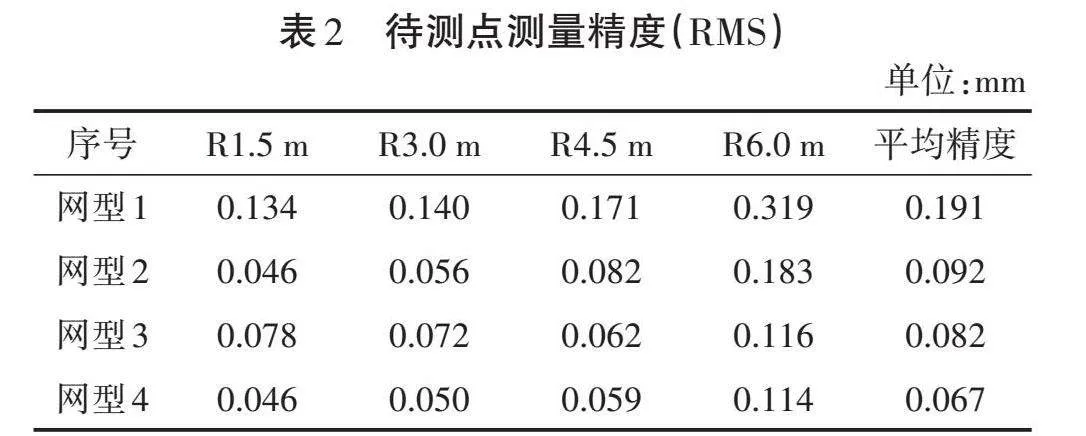
4.3.1 點精度分析。為了評估上述四種無人機攝影測量網型對測量精度的影響,對每種網型拍攝的照片進行掃描、匹配及光束法平差處理,從而精確計算出反光標在三維空間中的坐標。待測點在四種網型下的測量精度(均方根誤差,RMS)見表2。由表2可知,增加攝站的圈數和數量能顯著提高測量精度,且以三圈攝站的網型測量精度最高,平均為0.067 mm。由此可知,增加攝站圈數、優化攝站位置是提高測量精度的潛在途徑。
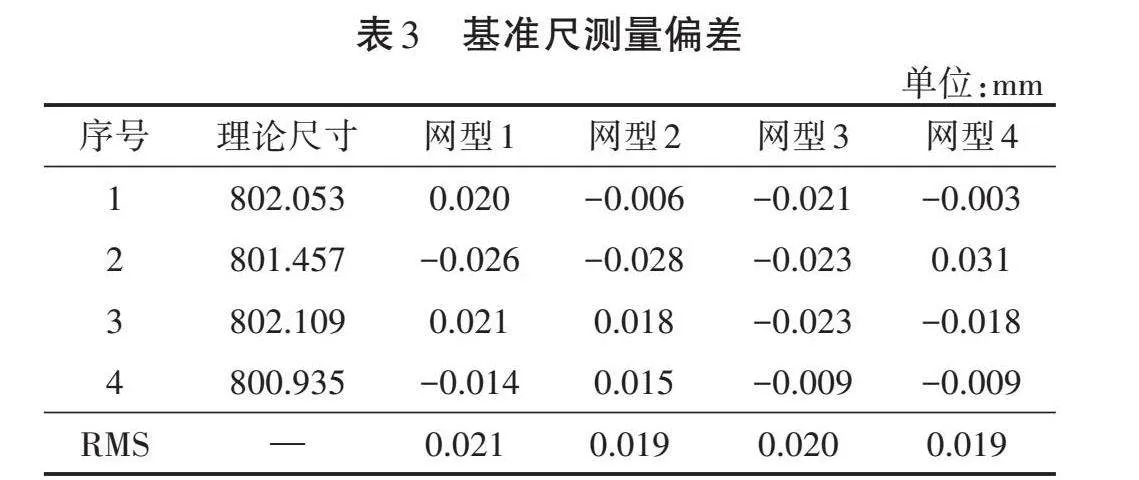
4.3.2 基準尺測量精度對比。為了系統地評估上述四種無人機攝影測量網型對測量精度的影響,實驗過程中對四種網型下基準尺的四個不同長度尺寸進行了精確測量,并將測量值與基準尺的理論長度進行比較,結果見表3。由表3可知,這四種網型測量得到的尺寸偏差總體上相差不大,由這表明所有網型在一定程度上都能保持測量的準確性。盡管這四種網型的偏差相近,但網型1和網型3在測量精度上略遜一籌。這可能是因為網型1和網型3的攝站布局未能最優化,導致在測量過程中出現了稍大的誤差。與網型1和網型3相比,網型2和網型4展現出更高的測量精度。這表明網型2和網型4在設計上更有效地優化了攝站的位置和數量,從而在減少測量誤差方面更為有效。
4.3.3 結果對比與分析。根據圖3、表2和表3的數據,可以得出以下結論。首先,網型1和網型2、網型3和網型4的交會角大致相同,但網型3和網型4通過增加待測點的拍攝頻次能有效提高測量精度。這表明在交會角相同的前提下增加拍攝頻次能在一定程度上提升精度。其次,盡管網型2和網型3的攝站總數量一致,但因攝站位置不同,二者較網型1增加了待測點的拍攝頻次和交會角,從而提高了各自的測量精度。其中,網型2更側重于內圈,網型3更側重于外圈。再次,網型4的攝站分布更為均勻,待測點的拍攝頻次和交會角均符合網型設計原則,因此其測量精度最高。最后,基準尺的測量結果受網型的影響,因為基準尺的位置大約位于距離天線主反射面2 m處,網型1和網型3缺少內圈攝站,交會不足,導致基準尺的測量精度較低;相反,網型2和網型4均設有內圈攝站,使得基準尺上的點具有較好的交會角和拍攝頻次,從而提高了測量精度。
基于天線主反射面上待測點的理論分析和實驗測量結果,本研究認為無人機攝影測量網型對測量精度有顯著影響,是影響天線測量精度的關鍵因素之一。為了確保測量的準確性,設計時應充分考慮網型設計原則,并根據拍攝頻次和交會角的理論計算結果,逐步在測量精度薄弱區域增加攝站數量。
5 結語
本研究采用理論分析和實驗驗證相結合的方法,深入探討無人機攝影測量網型對天線測量精度的影響,并提出設計和優化無人機攝影測量網型的策略。研究發現,在設計無人機攝影測量網型時,三圈攝站的網型布局能確保每個待測點至少被四個攝站拍攝,并維持交會角在60°至120°之間,可以有效提高測量精度和可靠性。這些發現為大型天線的精確測量提供了寶貴的技術指導。
無人機攝影測量技術在天線主反射面精度測量中的應用,不僅提高了測量效率,還確保了測量結果的精確性,為大型天線的生產和維護工作帶來了革新。隨著無人機技術的持續發展和攝影測量網型算法的不斷優化,無人機攝影測量技術將在大型結構的測量領域扮演更加關鍵的角色。
參考文獻:
[1]班友,劉源杰,王娜,等.射電望遠鏡天線主反射面面形測量方法綜述[J].中國科學:物理學 力學 天文學, 2024, 54(1):23-37.
[2]李干,李宗春,牟愛國.65 m射電望遠鏡背架結構日照溫度效應實驗研究[J].天文學報, 2013, 54(2):189-198.
[3]付麗,王宇飛,錢宏亮.平均風作用對天馬望遠鏡面形精度和指向精度的影響[J].天文學進展, 2019, 37(2):187-202.
[4]許文學.大型天線測量方法研究及應用[D].鄭州:解放軍信息工程大學,2006.
[5]黃桂平.數字近景工業攝影測量關鍵技術研究與應用[D].天津:天津大學,2005.
[6]張立琴,劉慶福.攝影測量在大型雷達天線陣面測量中的應用[J].現代雷達,2015,37(4):77-80.
[7]楊林華,張博倫,蔣山平,等.真空低溫環境拋物面天線的攝影測量網形研究[J].應用光學, 2017, 38(4):617-621.
[8]王保豐,李廣云,李宗春,等.高精度數字攝影測量技術在50 m大型天線中的應用[J].測繪工程, 2007(1):42-46.
[9]張新盼,任鵬飛,吳昕穎,等.天線反射體的空間幾何關系精密測量[J].中國測試, 2019, 45(5):54-59.
[10]馮其強,李廣云,李宗春.數字工業攝影測量技術及應用[M].北京:中國測繪出版社,2013.
