基于傾斜攝影的單體化模型制作研究
2024-11-29 00:00:00覃圣博汪洋
電腦知識與技術 2024年27期
摘要:實景三維模型是“一張皮”模型,為了便于對實景模型中的建筑物進行查詢管理,需要對建筑物進行單體化。文章首先對實景三維模型的生產流程進行了介紹;其次對目前常見的ID單體化、切割單體化、動態單體化和模型重構單體化進行了對比分析;最后采用SVSModeler軟件,對傾斜攝影模型單體化的作業流程進行了探索,得到了建筑物單體化成果。文章的研究可以為傾斜攝影單體化模型的制作提供借鑒。
關鍵詞:傾斜攝影;實景三維模型;單體化技術;單體化模型
中圖分類號:P231 文獻標識碼:A
文章編號:1009-3044(2024)27-0089-03
0 引言
實景三維模型是“一張皮”模型,即表皮模型,組成實景三維模型的最小單元是三角網,無數個互不交叉重疊的三角網組成了實景三維模型的整個結構框架[1-2]。實景三維模型具有測繪精度高、包含地物信息豐富、分辨率高的特點[3]。近年來,基于傾斜攝影的實景三維模型被廣泛用于實景三維中國建設,數字孿生等項目中,在這些項目中,要求能夠選中建筑物,并且通過調用平臺數據,來查詢選中建筑物的相關屬性,如結構、層數、該棟樓的住戶數等[4-5]。然而自動生產的實景三維模型,是無法對其中某一建筑物進行單獨選擇,因此需要對模型中的建筑物進行單體化[6-7]。本文首先介紹實景三維模型的制作流程,了解模型生產過程中各環節得到的成果,其次對目前常見的單體化技術進行概述,并對不同單體化方式進行對比分析,最后以SVSModeler 軟件為例,對SVSModeler 軟件在傾斜攝影單體化模型制作中的具體流程進行探討。
1 實景三維模型制作流程
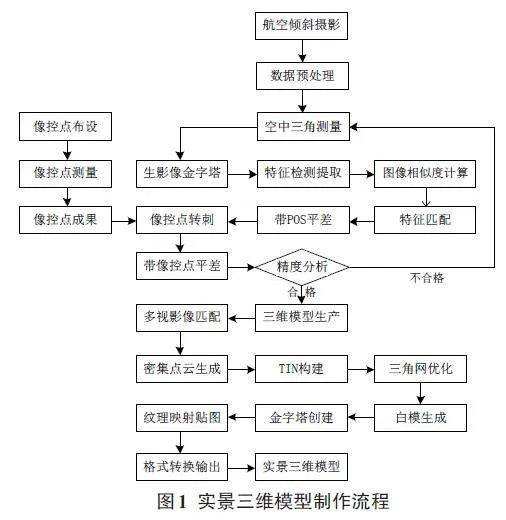
基于傾斜攝影技術制作實景三維模型成果,其主要流程如圖1所示。
從圖1可以看出,在實景三維模型制作中,主要包括外業航空傾斜攝影和像控點采集,內業包括數據預處理、空中三角測量和實景三維模型生產。在實景三維模型生產過程中,主要包括多視影像密集匹配、高密度點云的生成、不規則三角網TIN模型的構建、三角網的迭代優化、白模的生成、多層級金字塔的構建(OSGB格式的模型具有多層級金字塔)、傾斜影像的自動映射與優化,最后根據項目需求,完成不同數據格式的轉換與成果輸出。
2 常見單體化技術
單體化成果是指管理的目標對象是單獨的、可以被選中分離的實體,并且可以對選中的實體進行屬性查詢等操作。目前常見的單體化技術主要有四種,分別是ID單體化、切割單體化、動態單體化和模型重構單體化,每種單體的定義和特點如下。
2.1 ID 單體化
ID單體化是指結合已有的二維矢量面數據,將對應的矢量面的ID值作為屬性賦給三角網中的每個頂點,同一地物對應的三角網頂點就存儲了同一個ID值,當鼠標選中某一個三角面片時,根據這個三角面片頂點的ID值得到其他ID相同的三角面片并高亮顯示,就實現了單獨選中某一地物的效果[8]。這種方式不破壞原有模型結構,需要前期做一定的預處理工作。
2.2 切割單體化
用建筑物、道路、樹木等對應的矢量面,對傾斜攝影模型進行切割,也就是把連續的三角網從物理上分割開,從而實現單體化模型。這種方式破壞了原有的模型結構,得到的模型邊緣類似鋸齒,不齊平。
2.3 動態單體化
動態單體化是指將配套的二維矢量面與傾斜攝影模型加載到同一場景中,在渲染模型數據時把矢量面貼到傾斜模型對象表面,然后設置矢量面的顏色和透明度,從而實現可以單獨選中地物的效果。這種方式不需要對模型進行預處理,不破壞原有模型結構。
2.4 模型重構單體化
模型重構單體化是指利用空三加密后的空三成果,重建立體像對模型,在立體環境下,采集建筑物的頂點坐標和邊界線,并將建筑物的多個部分組合成一體,然后形成一個獨立的實體。這種方式不破壞原有模型成果,并且精度高,采集的建筑物實體結構精細,不存在建筑物底部變形拉花問題。
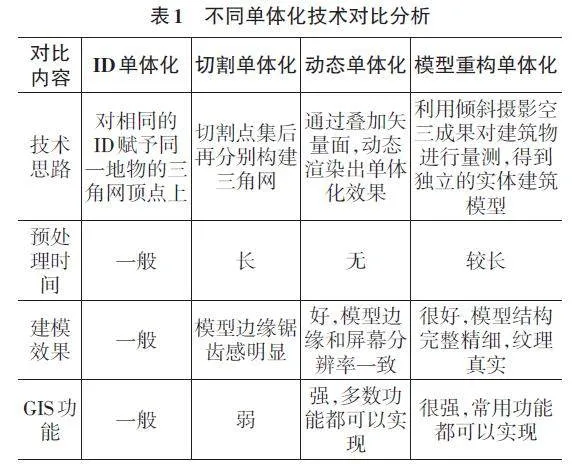
通過查詢文獻分析和結合實際項目,對不同單體化技術進行對比分析,具體內容見表1。
目前實景三維中國建設等項目對模型的精細度和結構完整性要求較高,對此,本文重點對模型重構單體化作業流程進行探討。
3 基于SVSModeler 軟件單體化建模
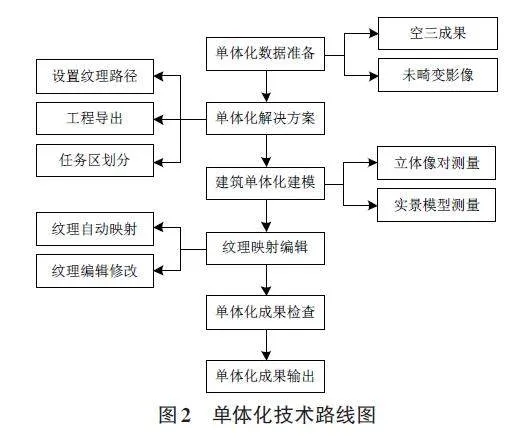
基于傾斜攝影數據,采用SVSModeler軟件對建筑物進行單體化,其作業流程如圖2所示。
3.1 數據準備
數據準備環節包括的數據主要有從傾斜建模軟件中導出的未畸變影像數據,每張影像對應的平差優化后的空三加密成果(xml格式)以及相機參數,OSGB 格式的實景三維模型成果。
3.2 新建單體化解決方案
在SVSModeler軟件中新建單體化解決方案,并將未畸變影像、外方位元素和OSGB格式的模型導入方案之中,得到可以對道路、建筑等地物進行單體化制作的工程。在創建工程的過程中,需要對導入的空三加密成果中的影像路徑重新進行映射,并且要創建影像的金字塔,這樣便于后期的作業,保證操作時調用影像快速、不卡頓。
3.3 建筑單體化建模
對于建筑單體化模型的制作,其主要包括以下幾個步驟:
1) 建筑輪廓的提取。對于建筑單體化來說,首先要對建筑的主體底面輪廓進行提取。輪廓提取常用的幾種方法有:①對于已有的地籍圖,將其格式轉為3DMAX軟件可以加載的格式,然后直接引入作為單體化建筑物的底面。②基于重建的立體像對,在立體環境下采集建筑物的底面輪廓線。③基于高分辨率真正射影像數據,直接對需要單體化的建筑進行平面矢量化,得到閉合的面作為建筑單體化的底面。這種方式采集的建筑物底面,有些存在陽臺,不是建筑物的主體輪廓,需要后期對輪廓邊界進行修改。④實景三維模型是全方位的,在單體化軟件中,可以查看其任何一個角度,因此可以直接在模型上對建筑物的主體輪廓底面進行采集,對于模型變形拉花的,這種方式采集的建筑物主體輪廓精度較差,需要借助立體模型完成高精度主體輪廓線的采集。本次在制作建筑單體化模型時,采用恢復的空三立體模型像對,對需要單體化的建筑物的主體底面進行采集。
2) 建筑主體結構的制作。在已有的建筑物輪廓底面上,通過SVSModeler軟件中的柱體擠出、拉伸、放大、縮小等功能,對建筑物的主體結構進行采集。對于部分結構復雜,SVSModeler軟件無法進行單體化的建筑物,采用SVSModeler軟件的3DMAX聯動模塊,在3dmax軟件中制作復雜的建筑物單體化模型。
3) 建筑附屬結構的制作。建筑物附屬結構主要包括女兒墻、陽臺、門廊、屋檐、樓梯等,多數結構較復雜。在采集完建筑物的主體結構后,利用SVSModeler 軟件的3DMAX聯動模塊,基于恢復的空三立體模型像對,對建筑附屬結構進行制作。在制作的過程中,其思路是由簡到難,所有的復雜結構都是通過簡單的結構組合而成的,因此分別制作單一的簡單結構,然后對制作的單一結構進行拼接,然后進行縮放、焊接等處理,最后將附屬結構和建筑主體組合在一起,成為一個建筑物實體。
3.4 紋理映射編輯
目前影像紋理的來源主要有傾斜攝影影像、地面補拍影像和正射影像。在紋理映射時,其主要是通過恢復的立體像對進行紋理的準確匹配,然后人工切換不同視角,選擇最優的照片進行紋理映射。對于映射效果不好的紋理,可以聯動Photoshop軟件,對紋理進行修改編輯,然后重新映射到單體化模型上。對于建筑物底部遮擋嚴重區域,傾斜攝影盲區部分的紋理貼圖,可以采用地面補拍的影像完成紋理的貼圖。在貼圖的過程中,由于地面補拍的影像沒坐標,分辨率也是任意的,因此需要對其進行拉伸、縮放、變形等操作,確保紋理貼圖過渡自然,符合實際情況。
3.5 單體化成果檢查
單體化成果檢查主要是對單體化模型的拓撲關系、結構完整性、紋理準確合理性進行檢查。拓撲關系可以采用軟件進行質檢,然后通過定位方式快速找到拓撲不正確的區域,進行拓撲問題的修改。結構完整性和紋理準確合理性主要采用人機交互的方式檢查,確保最終單體化模型成果結構完整,紋理過渡自然。
3.6 單體化成果輸出
單體化成果輸出主要是根據項目需求,導出符合要求的對應格式成果,要準確輸入偏移值,并且按照瓦片命名原則,對單體化模型成果準確命名,設置紋理貼圖路徑,導出最終的單體化模型成果。
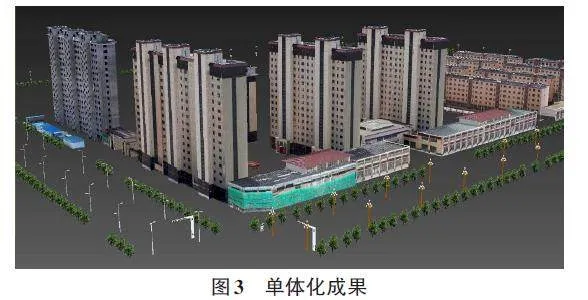
采用本文單體化作業方案,對某一區域建筑物、樹木、路燈、指示牌等地物進行單體化,得到的單體化成果如圖3所示。
4 結束語
本文對傾斜攝影建模流程展開深入研究,并對目前常見的四種單體化技術進行了對比分析,最后以SVSModeler軟件為例,探索了模型重構單體化技術在傾斜攝影單體化模型制作中的流程。本文的研究可以為傾斜攝影單體化模型的制作帶來參考。
參考文獻:
[1] 李俊,楊德宏,吳鋒振,等.傾斜攝影測量三維模型單體化構建及服務共享[J].軟件,2023,44(7):79-82.
[2] 史與正,陳夢華,黃煜,等.實景三維模型的建筑物單體模型框架搭建[J].測繪通報,2023(6):161-166.
[3] 王英,熊遠社,陳夢華,等.基于傾斜三維模型的規則建筑物自動單體化方法研究[J].地礦測繪,2023,39(2):13-18.
[4] 錢少華,周偉曉,竺建平.基于傾斜攝影的建筑單體化三維模型構建[J].測繪技術裝備,2023,25(2):125-128,138.
[5] 尹長林,許文強,姜琦,等.傾斜攝影三維建筑模型自動單體化與輪廓提取方法[J].測繪工程,2023,32(3):62-68.
[6] 張懂慶,魏軍,王萍.三種傾斜攝影建模軟件對比分析[J].測繪技術裝備,2022,24(3):114-119.
[7] 王萍,魏軍,茍彥梅.基于Smart3D和SVS軟件的實景三維模型生產[J].測繪標準化,2022,38(4):15-19.
[8] 張理想.一體化三維場景模型融合及單體信息添加方法研究[D].鄭州:鄭州大學,2018.
【通聯編輯:梁書】