基于模型修飾的城市精細化三維模型構建
2024-11-29 00:00:00劉東鑫劉丹萍
電腦知識與技術 2024年27期



摘要:為解決傾斜攝影自動生產的城市三維模型中存在的路燈懸浮、宣傳牌破損等問題,文章探討了模型修飾技術在解決上述問題、提升模型質量方面的應用。文章首先介紹了無人機傾斜攝影技術和三維模型制作流程,其次對目前主流的模型修飾技術進行介紹,然后對模型常見問題進行分析,并給出模型修飾措施,最后以某城市實景三維中國建設項目為例,對模型進行修飾,得到了精細化模型成果。研究結果表明,模型修飾技術能夠有效解決城市三維模型中存在的常見問題,顯著提升模型的精細化程度。
關鍵詞:傾斜攝影;模型修飾;三維建模;精細化模型;實景三維中國
中圖分類號:P231 文獻標識碼:A
文章編號:1009-3044(2024)27-0083-03
0 引言
實景三維中國建設是國家測繪地理信息發展的重要戰略,旨在構建覆蓋全國、統一規范、互聯互通的三維空間信息資源。然而,傳統傾斜攝影技術在三維模型自動生產過程中,由于航攝影像部分區域遮擋嚴重、獲取影像時車輛發生位移、攝影測量軟件解算精度不高等原因,導致模型存在路燈懸浮、宣傳牌破損、車輛破損、建筑物結構變形等問題,難以滿足實景三維中國建設對模型精度和質量的要求。為了解決自動生產的模型成果存在的問題,得到質量較高的模型成果,很多學者對此展開了研究。王萍[1]等人探討了基于Smart3D和SVS軟件生產實景三維模型的流程,在一定程度上提升了模型成果質量。董飛飛[2]等人采用多源數據融合的方式來生產高質量的實景三維模型成果。張懂慶[3]等人通過對比分析主流建模軟件的優缺點,將不同軟件的優點相結合,從而生產精細化模型。蔡占玲[4]以大同古城模型生成為例,探討了精細化建模的關鍵技術。徐夢潔[5]和王小妹[6]等人從單體化技術入手,探討了單體化技術在精細化模型生產中的應用,并得出基于單體化技術可以得到精細化模型成果。盡管眾多學者對精細化模型制作進行了研究,但從效率和操作可行性來說,效率較低,操作難度高。本文旨在探討模型修飾技術在城市精細化三維模型構建中的應用,通過對模型進行針對性的修復和優化,提升模型的精度、真實性和美觀度,為實景三維中國建設提供高質量的數據基礎。文章首先介紹了無人機傾斜攝影技術和三維模型制作流程,然后詳細闡述了模型修飾技術的原理和方法,并結合具體案例,分析了模型修飾技術在解決城市三維模型常見問題方面的應用效果。本文的研究可以為模型修飾及精細化模型制作提供參考。
1 無人機傾斜攝影
無人機傾斜攝影是指在無人機上搭載多臺航攝儀(一般為非量測數碼相機),從空中對地面進行全方位、多角度、高分辨率、高重疊度影像數據的采集[7-8],經傾斜攝影軟件處理后,可獲得空三加密成果、三維模型、正射影像、數字表面模型等多種測繪產品。傾斜攝影技術憑借其多角度、高分辨率、高重疊度的優勢,近年來在測繪地理信息領域得到迅速發展,并廣泛應用于城市規劃、災害監測、文物保護等多個行業。
2 模型修飾
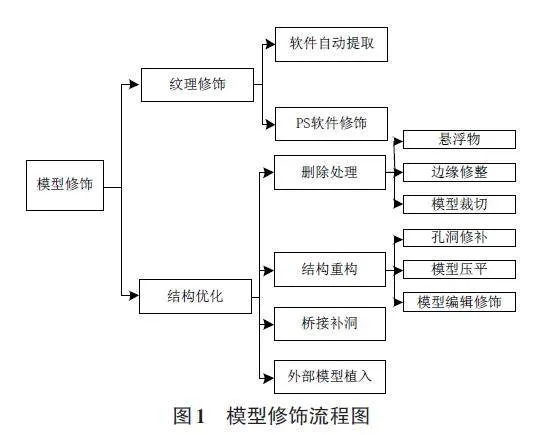
模型修飾是指采用紋理修飾或結構優化技術對模型進行處理,得到質量更高的模型成果[9-10]。目前模型修飾技術主要有兩種,分別是紋理修飾和結構優化。紋理修飾是指對映射錯誤的紋理進行修改。這種方式不改變模型的結構,只對映射錯誤的紋理進行優化處理,適用于結構完整,紋理映射錯誤的模型。結構優化是指對模型結構進行修改,常見方法有壓平模型、修補空洞、刪除模型、拉伸結構等。這種優化方式可以得到結構與實際地物更相符的模型成果,適用于結構不完整的模型。基于模型修飾技術對模型進行優化處理,主要的作業流程如圖1所示。
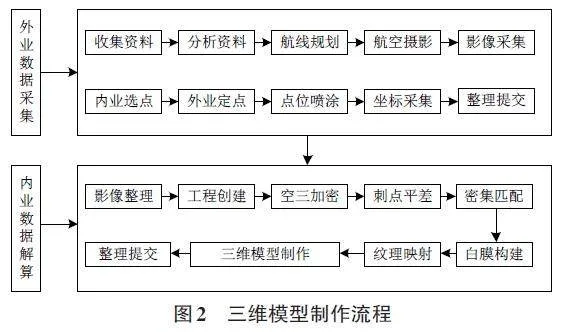
3 三維模型制作流程
該流程主要包含的內容有兩部分,分別為外業數據的采集和內業數據的解算。外業數據的采集主要包括影像數據的采集和像控點數據的采集;內業數據的解算主要是指對航攝傾斜影像的解算,并基于空三加密成果完成其他測繪產品的制作。本文方案的自動化構建模型流程如圖2所示。
4 模型常見問題分析及優化措施
4.1 路燈懸浮物問題分析及優化措施
路燈和樹木的頂部通常較大,而中間部分則相對細小。在基于傾斜影像生產三維模型時,路燈和樹木的中間部分常會出現斷裂現象,形成所謂的“懸浮物”。影像解算的本質是對重疊區域影像上同一地物進行同名點匹配。在進行匹配之前,首先會通過特征點檢測和提取算法,從海量影像中提取相同影像上的同名點,然后通過同名點匹配,糾正影像的空間位置和姿態。基于匹配得到的同名點,采用多視影像密集匹配算法,對影像進行解算,從而獲取密集的點云數據。由于路燈和樹木的中間部分較細小,因此密集匹配得到的點云數量較少。在基于密集點云構建三角網時,由于點云數量不足,導致構建的三角網出現不連續性問題,形成“懸浮物”。增加點云數量可以有效解決懸浮物問題。增加點云數量的方法包括采用三維激光掃描技術,對路燈和樹木進行掃描,以獲取更密集的點云數據;也可以使用長焦距相機或降低飛行高度,以獲取分辨率更高的影像數據,從而解算出密度更高的點云數據。樹木和路燈在實際應用中主要起到美化場景的作用,因此除了上述兩種方法外,還可以采用外部模型植入的方式進行處理。具體來說,即刪除原有的路燈和樹木模型,將外部模型植入到場景中,然后調整其位置、大小和角度,以獲得更高質量的模型成果。
4.2 宣傳牌破損問題分析及優化措施
宣傳牌一般是立方體結構,具有較長的長度、較高的寬度和較薄的厚度,一般為幾毫米到幾厘米不等。組成模型結構的最小單元是三角網,而三角網是基于密集點云構建而成的。目前主流的軟件采用的三角網構建算法都是不規則三角網,該算法要求構建的三角網三邊之和最小,且構建的三角網互不交叉、互不重疊。基于這一算法,在對宣傳牌進行三角網構建時,由于宣傳牌厚度較薄,因此會將宣傳牌兩側的點云構建到同一個三角網中,導致同側點云無法構建三角網,出現孔洞。對于這種問題的處理,目前主流的技術有兩種,一種是模型修飾,一種是單體化。模型修飾首先是指利用修模軟件對孔洞進行修補,然后以宣傳牌平面為基準面,對高出基準面的部分進行壓平處理,從而得到規整的宣傳牌,最后對宣傳牌紋理進行映射編輯,得到最終優化后的宣傳牌。這種方式得到的精細化模型是在原模型之中的,與原始模型是一體的,不利于屬性查詢等操作。單體化是指基于恢復的虛擬立體像對,在立體環境下,采集宣傳牌的結構,然后構建新的宣傳牌模型。這種方式得到的模型是獨立于原有模型的,可以對其屬性進行查詢等,可操作性強。上述這兩種方案都可以得到精細化宣傳牌模型,在實際作業中,須根據項目需求自行選擇合適的優化措施。
4.3 車輛破損問題分析及優化措施
道路上的車輛通常處于動態狀態,即在不同影像上,車輛的位置是不同的。在解算過程中,由于車輛位置不同,可能匹配出錯誤的同名點。在密集點云解算時,由于同名點是錯誤的,匹配出的密集點云也會不準確。在構建三角網時,基于錯誤的點云構建得到的三角網與實際情況不符,進而導致車輛出現大幅度的破損。對于道路上破損的車輛,最直接的處理方式是進行壓平處理。即將車輛壓平到路面上,然后聯動Photo?shop軟件,對錯誤的紋理進行編輯,以獲得與實際道路相符、干凈、整潔的道路面,從而提升模型成果的質量。
4.4 建筑物結構變形
對于建筑物模型來說,底部通常會存在一定的變形,其主要原因是建筑物底部屬于航攝盲區,目前的影像解算算法無法對航攝盲區進行高精度同名點的解算,因此也無法匹配精確的密集點云。在構建白模時,由于缺少必要的頂點和邊界點云數據,導致構建的三角網與建筑物實際結構不符,出現建筑物結構變形,紋理拉花。對于建筑物結構的優化處理,目前常用的方法有兩種,即建筑物結構編輯和單體化模型制作。建筑物結構編輯是指在已有模型上,對建筑物的邊界或頂點進行拉伸處理,使建筑物邊界互相垂直,更加筆直。建筑物單體化是指在立體環境下,采集建筑物的頂點、邊界,通過拉伸、縮放等方式,從而重新構建一個建筑物體。基于建筑物結構編輯和單體化方式,都可以得到高質量三維模型成果。
5 案例分析
某城市開展實景三維中國建設項目,需要生產實景三維模型。結合圖2的作業流程,選用六旋翼無人機搭載5鏡頭相機進行傾斜影像數據的采集,共采集傾斜影像數據100 500張,POS數據20 100個。使用Context Capture軟件加載影像和POS數據,并進行空中三角測量解算和三維模型生產。通過交互式軟件對模型成果進行查看,發現模型存在道路兩側路燈懸浮物、宣傳牌破損、路面車輛破損、部分建筑物結構變形等問題。這些問題影響模型整體的質量,需要對其進行優化處理。本文在對模型修飾技術進行深入分析后,采用模型修飾方式來優化本次生產的模型成果。
對于宣傳牌破損的問題,采用結構重構技術進行優化處理。首先對孔洞進行修補,確保破損區域無孔洞,然后對宣傳牌兩側的結構進行壓平處理,確保側面的三角網頂點都位于同一個立面上,最后對模型紋理進行編輯修飾,使其紋理與周邊紋理過渡自然,與實際現狀相符。如圖3所示,是宣傳牌破損優化前后對比圖。
對于路面車輛破損的問題,直接采用模型壓平的方式,對車輛進行壓平處理,然后對壓平后的紋理進行優化處理,使其與周邊紋理過渡自然,符合道路實際情況。如圖4所示,是路面破損車輛優化前后對比圖。
對于建筑物結構變形的問題,采用修模軟件中的結構拉伸功能,結合建筑物實際的位置和結構,對變形建筑物的頂點或者邊界線進行拉伸,使其與建筑物實際結構一致,然后編輯紋理,得到與實際一致的建筑物模型成果。如圖5所示,是建筑物結構變形優化前后的對比圖。
通過人機交互的方式查看圖3、圖4和圖5的成果,通過對比分析,采用本文的優化方案,對問題模型進行優化,可以得到更精細的模型。
6 結束語
本文研究了模型修飾技術在城市精細化三維模型構建中的應用,通過對路燈懸浮、宣傳牌破損、車輛破損、建筑物結構變形問題的分析,提出了多種切實可行的解決方案,并通過案例驗證了方案的可行性和有效性。本文的研究結果為城市精細化三維模型的構建提供了新的思路和方法,具有一定的理論意義和應用價值。未來可以進一步研究如何將模型修飾技術與人工智能、深度學習等技術相結合,以實現更加自動化和智能化的三維模型精細化處理。
參考文獻:
[1] 王萍,魏軍,茍彥梅.基于Smart3D和SVS軟件的實景三維模型生產[J].測繪標準化,2022,38(4):15-19.
[2] 董飛飛,許懿娜,孫越喬.多源影像實景三維融合建模及關鍵問題研究[J].現代測繪,2022,45(5):9-13.
[3] 張懂慶,魏軍,王萍.三種傾斜攝影建模軟件對比分析[J].測繪技術裝備,2022,24(3):114-119.
[4] 蔡占玲.大同古城精細三維建模關鍵技術研究[J].城市勘測,2020(3):108-111.
[5] 徐夢潔,鄭朝峰,季曉菲.基于無人機數據的精細化模型制作研究[J].電腦知識與技術,2024,20(15):97-98,101.
[6] 王小妹,王雯雯.基于無人機傾斜攝影的精細化三維模型制作研究[J].電腦知識與技術,2024,20(14):104-106,109.
[7] 馮思偉,顏軍,劉璐銘,等.無人機傾斜攝影精細化模型構建及應用[J].測繪與空間地理信息,2024,47(6):48-50,54.
[8] 孫志強,馬杰,劉津懌.無人機傾斜攝影在實景三維建設中的應用[J].測繪與空間地理信息,2024,47(S1):350-352.
[9] 張一璞.基于無人機傾斜攝影技術的精細化實景三維模型制作研究[J].信息記錄材料,2024,25(6):239-241.
[10] 朱立波,黃文騫,石志遠,等.傾斜攝影三維建模及不同軟件修模效果分析[J].地理空間信息,2023,21(10):104-107.
【通聯編輯:梁書】