基于天線方向性參數辨識的航空器測向研究
2024-11-21 00:00:00袁偉力湯新民顧俊偉
系統工程與電子技術 2024年7期



摘" 要:
雷達測向是航空器必不可少的合作型監視手段,其中測向天線的方向性參數決定了測向的精度。基于傳統相鄰比幅測向原理及比幅測向誤差,提出修正比幅測向模型。基于修正比幅測向模型,確定需要辨識的天線方向性參數,提出一種誤差修正遺傳模擬退火(error correction genetic simulated annealing, COR-GSA)算法對未知定向天線方向性參數進行辨識。利用自主設計的測向雙通路接收機開展辨識實驗,并用1 000組航空器真實方位數據進行驗證,結果表明采用COR-GSA算法辨識天線方向性參數的測向精度最高。最后,利用辨識后的天線方向性參數對航空器進行方位跟蹤,跟蹤誤差較未進行方位修正的跟蹤誤差降低了18.3%。
關鍵詞:
航空器測向; 天線參數辨識; 修正比幅測向; 方位跟蹤
中圖分類號:
V 355
文獻標志碼: A""" DOI:10.12305/j.issn.1001-506X.2024.07.26
Research on aircraft direction finding based on antenna directionality parameter identification
YUAN Weili1, TANG Xinmin2,*, GU Junwei1
(1. College of Civil Aviation, Nanjing University of Aeronautics and Astronautics, Nanjing 210016, China;
2. College of Transportation Science and Engineering, Civil Aviation University of China, Tianjin 300300, China)
Abstract:
Radar direction finding is an essential cooperative monitoring method for aircraft, and the directional parameters of the direction finding antenna determine the accuracy of direction finding. A modified amplitude comparison direction finding model is proposed based on the traditional principle of adjacent amplitude comparison direction finding and the error of amplitude comparison direction finding. Based on the correction of amplitude comparison direction finding model, an error correction genetic simulated annealing (COR-GSA) algorithm is proposed to identify unknown directional antenna directionality parameters by determining the antenna directionality parameters that need to be identified. Identification experiments are conducted using a self-designed dual channel direction finding receiver, and 1 000 sets of aircraft real azimuth data are used for verification. The results show that using the COR-GSA algorithm to identify antenna directional parameters has the highest direction finding accuracy. Finally, the identified antenna directionality parameters are used to track the aircraft’s azimuth, and the tracking error is reduced by 18.3% compared to the tracking error without azimuth correction.
Keywords:
aircraft direction finding; antenna parameter identification; correction of amplitude comparison direction finding; azimuth tracking
0" 引" 言
為實現無人機和有人機共享空域飛行,監視航空器的運行狀態是保證安全的首要因素。空域中的常用監視手段有S模式詢問應答、廣播式自動相關監視(automatic dependent surveillance-broadcast, ADS-B)、多點定位系統[12]。S模式詢問應答和ADS-B是目前最常用的兩種合作型監視手段。對于ADS-B監視,航空器通過接收空域內的ADS-B報文獲取他機的經度、緯度、高度等信息,實現交通態勢感知[36]。對于S模式詢問應答,航空器通過二次雷達詢問機向裝有應答機的航空器發出1 030 MHz詢問并根據S模式1 090 MHz應答信號進行測向、測距[79],其中S模式詢問應答是最重要的監視手段[10]。雷達測向的基本原理是基于天線的方向性對來自不同方向的信號的相位差或振幅差進行計算得到相對方位[11],其最重要的特征就是天線的方向性,因此天線的方向特征參數對測向結果起了決定性作用。由于多根天線方向圖簡單疊加會給測向帶來較大誤差,多根天線準確的方向特征參數不可獲得,為實現航空器準確的方位跟蹤需要對天線的方向特征參數進行辨識。
國內外對于天線方向性參數主要在于研究天線結構對天線方向性參數的影響,如貼片方式、不同介質覆蓋層和光學特征等[1214]。未知天線方向性參數的研究集中在測量上,Zhai等提出一種抗干擾和精確的天線參數測量框架,通過無人機測量基站天線參數實現全自動移動通信[15]。Rajeswari等提出一種基于移動的設計天線,以實現在android平臺中測量指定天線參數,此方案已在實驗室中得到應用[16]。Expósito等利用消音室測量20~70 GHz天線方向性參數,設計了一種適合測量這種頻率范圍的消聲室,最終的實驗結果表明測量中損耗最小,測量性能較優[17]。
許多研究者對天線的測向方法進行研究,鄭修鵬等對全向比幅測向和相鄰比幅測向進行仿真對比,驗證了天線數量和采用天線方向圖中傅里葉系數衰減快的天線可以提高全向比幅測向的測向精度[18]。Prince等在傳統比幅測向的基礎上提出了多波束倫堡透鏡天線測向方法,在給定透鏡半徑和天線激勵饋電參數下驗證了該測向方式的有效性[19]。Ahmad等在傳統的和差比幅測向基礎上提出了±20°正交切換波束提高了測向的精度,并利用設計的天線陣列驗證了理論結果[20]。Wan等利用陣列天線觀測的高階統計量,設計了一個四階累計量矩陣用來估計到達方法,實驗結果表明該方法具有更好的波達方向(direction of arrival, DOA)估計性能[21]。Liu等提出一種模糊度成功求解概率分析方法來解決相位法測向的精度與相位模糊性之間的矛盾,最后利用仿真驗證了該方法在某些復雜情況下是有效的[22]。劉子奇等提出一種固定基線約束的低成本全球導航衛星系統(global navigation satellite system, GNSS)測向方法,利用雙天線間固定基線約束信息,提升低成本GNSS測向的精度與可靠性[23]。Ren等提出一種采用葉片調制的單頂帽測向天線,研究了不同葉片旋轉角度的天線之間復雜輻射方向圖的振幅和相位的相關系數,并驗證了測向精度[24]。
對于參數辨識,Chen等針對傳統片上系統累積誤差的缺點,提出一種基于改進分數階模型的在線全參數辨識和自適應無跡粒子濾波器相結合的鋰離子電池片上系統估計器,并證明該算法收斂更快[25]。Wang等提出一種新的永磁同步電機無差拍控制參數在線阿達林神經網絡辨識算法,在永磁同步電機平臺上的實驗結果驗證了該算法的優越性[26]。向啟均提出一種改進模擬退火(simulated annealing, SA)遺傳算法(genetic algorithm, GA)對機器人動力學參數進行辨識,并根據仿真實驗驗證了該算法具有更好的尋優性[27]。王保民等在粒子群算法的基礎上,提出一種隨機權重粒子群算法對機器人動力學參數進行辨識,提高了辨識算法的收斂速度和范圍,證明了該算法對機器人動力學參數的辨識具有較高的精度[28]。Ahereh等提出一種柔性改進粒子群優化的啟發式算法和基于梯度的序列二次規劃的混合算法,提高了對單二極管、雙二極管和三二極管光伏模型和實際光伏模塊的參數辨識精度[29]。 De等提出了一種基于卷積神經網絡的笛卡爾機器人動態參數識別方法,結果表明,該識別率達到0.991 6,實驗機器人達到0.919 6[30]。
綜上所述,天線的方向性參數與具體的天線特征有關系,當前國內外對于未知天線方向性參數的研究主要通過改進測量方式來開展。目前,測向方法的研究都是基于天線方向性參數已知的情況下增加附加部件和復雜算法進行測向研究。多個天線方向圖采用通用擬合模型疊加進行方位計算會產生較大誤差,且相位法測向需要多根陣列天線,不適用于民航航空器測向。對于參數辨識的研究,目前國內外主要研究參數的在線辨識,著重于辨識實時性,強調收斂速度。
本文以未知方向性參數的定向天線為基準,以辨識的方式來獲取天線準確方向性參數。基于相鄰比幅測向原理及誤差分析,提出一種修正比幅測向模型。根據需要辨識的天線方向性參數,提出一種誤差修正遺傳模擬退火(error correction genetic simulated annealing,COR-GSA)算法對天線方向性參數進行離線辨識,旨在提高精度,并基于辨識參數、自主設計的雙通路接收機和航空器的應答信號對航空器進行方位跟蹤和誤差分析。
1" 修正比幅測向模型
1.1" 傳統比幅測向原理
振幅測向法是雷達測向的常用手段,其中相鄰比幅測向屬于振幅單脈沖測向技術的一種測向方法,其核心內容為通過對N(N≥2)個定向天線接收通道所接收的外部信號的振幅求比值來實現對目標的測向。
采用N個具有相同方向圖的獨立天線產生毗鄰波束覆蓋所需測向方位,這些天線的歸一化方向圖可以表示為
Fi(θ)=F(θ-iθs), i=0,1,…,N-1(1)
式中:θs為兩個相鄰天線軸線之間的夾角。
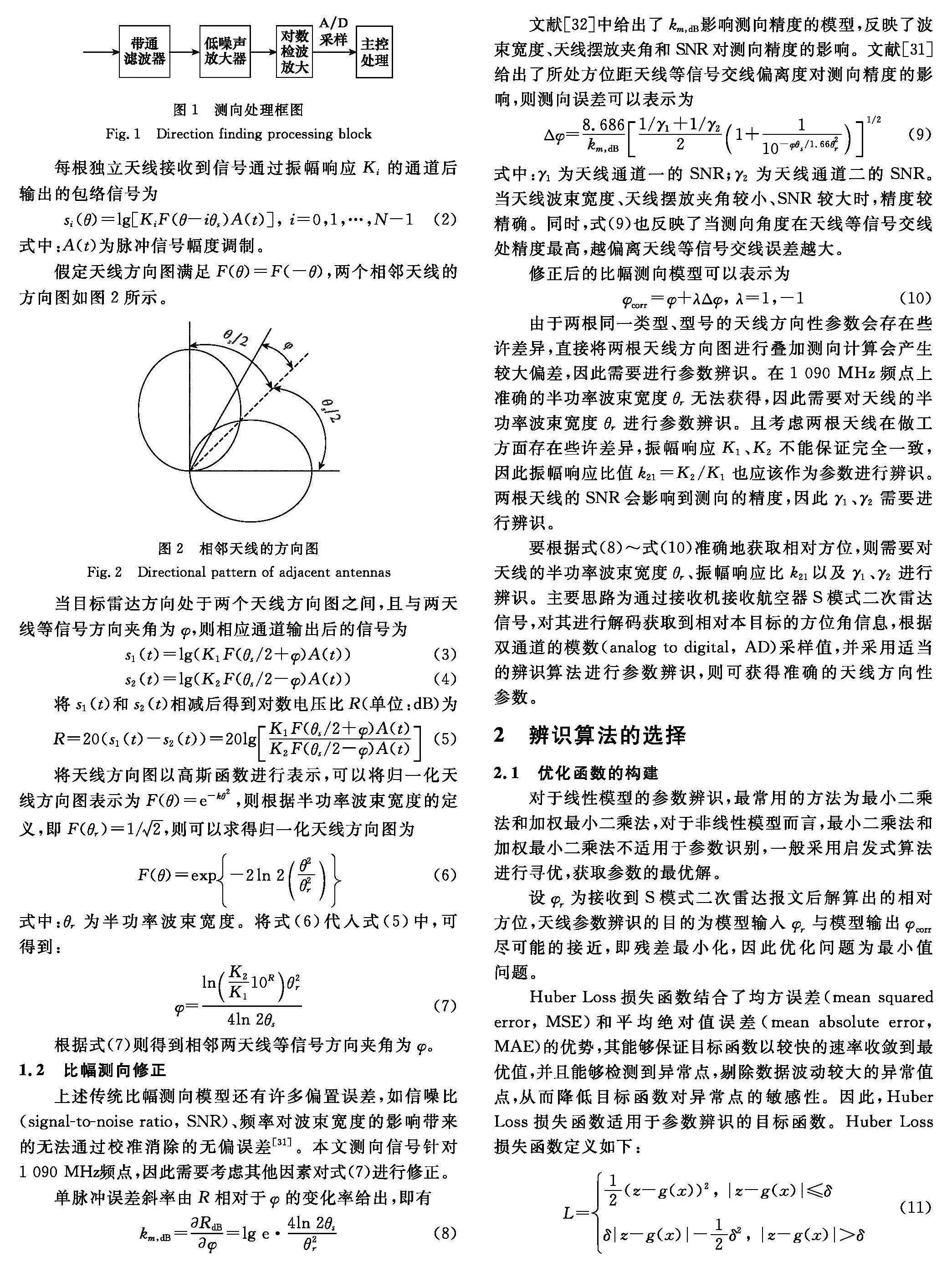
射頻前端信號由N路通道定向天線進行接收,通過濾波電路,通過低噪聲放大器進行信號放大,檢波和對數放大和模數變化獲得數字信號送入處理模塊進行測向處理,如圖1所示。
每根獨立天線接收到信號通過振幅響應Ki的通道后輸出的包絡信號為
si(θ)=lg[KiF(θ-iθs)A(t)], i=0,1,…,N-1(2)
式中:A(t)為脈沖信號幅度調制。
假定天線方向圖滿足F(θ)=F(-θ),兩個相鄰天線的方向圖如圖2所示。
當目標雷達方向處于兩個天線方向圖之間,且與兩天線等信號方向夾角為φ,則相應通道輸出后的信號為
s1(t)=lg(K1F(θs/2+φ)A(t))(3)
s2(t)=lg(K2F(θs/2-φ)A(t))(4)
將s1(t)和s2(t)相減后得到對數電壓比R(單位:dB)為
R=20(s1(t)-s2(t))=20lgK1F(θs/2+φ)A(t)K2F(θs/2-φ)A(t)(5)
將天線方向圖以高斯函數進行表示,可以將歸一化天線方向圖表示為F(θ)=e-kθ2,則根據半功率波束寬度的定義,即F(θr)=1/2,則可以求得歸一化天線方向圖為
F(θ)=exp-2ln 2θ2θ2r(6)
式中:θr為半功率波束寬度。將式(6)代入式(5)中,可得到:
φ=lnK2K110Rθ2r4ln 2θs(7)
根據式(7)則得到相鄰兩天線等信號方向夾角為φ。
1.2" 比幅測向修正
上述傳統比幅測向模型還有許多偏置誤差,如信噪比(signal-to-noise ratio, SNR)、頻率對波束寬度的影響帶來的無法通過校準消除的無偏誤差[31]。本文測向信號針對1 090 MHz頻點,因此需要考慮其他因素對式(7)進行修正。
單脈沖誤差斜率由R相對于φ的變化率給出,即有
km,dB=RdBφ=lg e·4ln 2θsθ2r(8)
文獻[32]中給出了km,dB影響測向精度的模型,反映了波束寬度、天線擺放夾角和SNR對測向精度的影響。文獻[31]給出了所處方位距天線等信號交線偏離度對測向精度的影響,則測向誤差可以表示為
Δφ=8.686km,dB1/γ1+1/γ221+110-φθs/1.66θ2r1/2(9)
式中:γ1為天線通道一的SNR;γ2為天線通道二的SNR。當天線波束寬度、天線擺放夾角較小、SNR較大時,精度較精確。同時,式(9)也反映了當測向角度在天線等信號交線處精度最高,越偏離天線等信號交線誤差越大。
修正后的比幅測向模型可以表示為
φcorr=φ+λΔφ, λ=1,-1(10)
由于兩根同一類型、型號的天線方向性參數會存在些許差異,直接將兩根天線方向圖進行疊加測向計算會產生較大偏差,因此需要進行參數辨識。在1 090 MHz頻點上準確的半功率波束寬度θr無法獲得,因此需要對天線的半功率波束寬度θr進行參數辨識。且考慮兩根天線在做工方面存在些許差異,振幅響應K1、K2不能保證完全一致,因此振幅響應比值k21=K2/K1也應該作為參數進行辨識。兩根天線的SNR會影響到測向的精度,因此γ1、γ2需要進行辨識。
要根據式(8)~式(10)準確地獲取相對方位,則需要對天線的半功率波束寬度θr、振幅響應比k21以及γ1、γ2進行辨識。主要思路為通過接收機接收航空器S模式二次雷達信號,對其進行解碼獲取到相對本目標的方位角信息,根據雙通道的模數(analog to digital, AD)采樣值,并采用適當的辨識算法進行參數辨識,則可獲得準確的天線方向性參數。
2" 辨識算法的選擇
2.1" 優化函數的構建
對于線性模型的參數辨識,最常用的方法為最小二乘法和加權最小二乘法,對于非線性模型而言,最小二乘法和加權最小二乘法不適用于參數識別,一般采用啟發式算法進行尋優,獲取參數的最優解。
設φr為接收到S模式二次雷達報文后解算出的相對方位,天線參數辨識的目的為模型輸入φr與模型輸出φcorr盡可能的接近,即殘差最小化,因此優化問題為最小值問題。
Huber Loss損失函數結合了均方誤差(mean squared error, MSE)和平均絕對值誤差(mean absolute error, MAE)的優勢,其能夠保證目標函數以較快的速率收斂到最優值,并且能夠檢測到異常點,剔除數據波動較大的異常值點,從而降低目標函數對異常點的敏感性。因此,Huber Loss損失函數適用于參數辨識的目標函數。Huber Loss損失函數定義如下:
L=12(z-g(x))2, |z-g(x)|≤δ
δ|z-g(x)|-12δ2, |z-g(x)|gt;δ(11)
式中:δ為超參數,其決定了Huber Loss損失函數對MSE和MAE的偏向性。
則天線參數辨識的目標函數可以定義為
min∑ni=1Li,Li=12(φri-φai)2,|φri-φai|≤δ
δ|φri-φai|-12δ2,|φri-φai|gt;δ(12)
式中:φa為未修正的測向結果或修正測向結果。由于式(12)為非線性方程,則應采用啟發式智能算法進行參數辨識。
2.2" GA
GA是一種全局優化算法,其原理與生物學的遺傳與變異原理相似,傳統GA尋優能力較差,容易陷入局部最優解[33],因此對傳統GA進行改進,防止收斂過早導致運算達不到最優,GA求解的問題為最小值問題,其主要流程如下:
步驟 1" 設定種群大小為N,初始化種群,將θr和k21按照所需的精度轉換成二進制串。
步驟 2" 進行“輪盤賭”選擇,個體的選擇概率為個體適應度占總適應度的比值,表示為pi=fi∑Ni=1fi。
步驟 3" 交叉操作,將父代種群以一隨機交叉概率pc在某特定位置進行交叉獲得子代種群:
xt+1i=αxti+(1-α)xti+1xt+1i+1=αxti+1+(1-α)xti(13)
式中:α為0~1的隨機數;xti為第i個體的第t代
步驟 4" 變異操作,將子代種群中以一隨機變異概率pm對二進制串中的某一位進行改變。
重復步驟2~步驟4,直至該算法收斂。
在算法的迭代過程中,交叉概率和變異概率起至關重要作用,在算法初期需要較大交叉概率和較小變異概率,中期需要適當降低交叉概率和適當提高變異概率,后期需要較小交叉概率和較大變異概率,因此需要對交叉概率和變異概率進行改進。
Logistic方程常用于預測事件發生概率、描述自然界的某些有界增長現象,其方程可以表示為
N=Kea-rt+1(14)
式中:N為增長量;t為時間序列;r為增長量;K為環境容量;a為控制量。則交叉概率pc和變異概率pm可分別表示為
pc=pca-pcie(δ-1/3)/k1+1+pci(15)
pm=pma-pmie-k2(δ-1/3)+1+pmi(16)
式中:k1,k2gt;0表示曲線的平滑程度;pca,pci分別為最大交叉概率和最小交叉概率;pma,pmi分別為最大變異概率和最小變異概率;δ為種群的收斂系數,表示為δ=arcsin(fmin/favg)/(π/2),δ可以非線性地對種群收斂做出判斷,更加符合種群收斂或分散情形,其中favg為種群的平均適應函數值,fmin為種群的最小適應函數值。
2.3" SA算法
SA算法來源于固體退火原理,是一種基于概率的優化算法。原理是將固體加熱到足夠高的溫度,然后緩慢冷卻。在加熱的情況下,固體內部粒子能量較高,伴隨著溫度升高,粒子可以自由移動,重新排列并變得無序;降低溫度后,粒子能量會逐漸貶低;從高溫開始,粒子慢慢冷卻,粒子逐漸趨于有序,直至到達常溫時,變成基態。
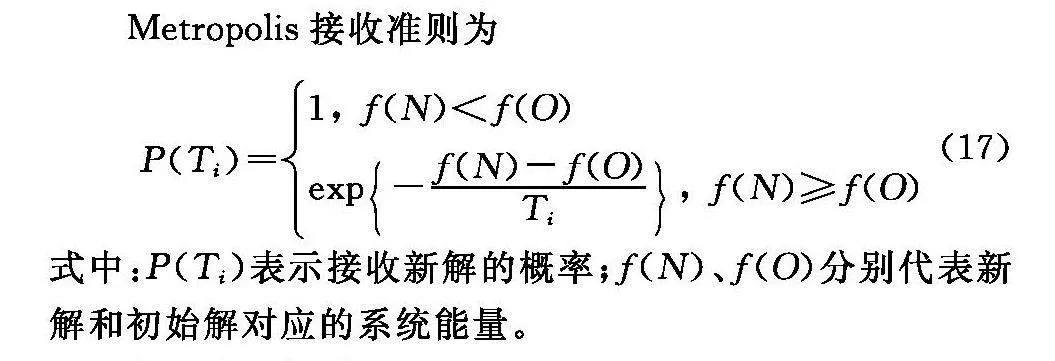
Metropolis接收準則為
P(Ti)=1, f(N)lt;f(O)
exp-f(N)-f(O)Ti, f(N)≥f(O) (17)
式中:P(Ti)表示接收新解的概率;f(N)、f(O)分別代表新解和初始解對應的系統能量。
主要流程如下:
步驟 1" 初始化,設定一個較高的初始溫度T0,隨機產生一個在一定范圍內的初始解x0,設定內循環迭代次數L,終止溫度Tf,溫度遞減系數q。
步驟 2" 對當前解xi隨機產生一個擾動,生成新解xj,計算與當前解的差值Δf=f(xi)-f(xj)。
步驟 3" 判斷新解是否能被接受:如果Δflt;0,則新解xj能被接受;如果Δfgt;0,則新解xj根據Metropolis接收準則進行檢驗,檢測exp{-Δf/Ti}的概率來判定是否接受新解。當新解xj能被確認接受時,新解xj作為當前解。
步驟 4" 循環步驟1~步驟3,重復L次擾動和接受過程,執行下一步驟。
步驟 5" 進行退溫操作,循環步驟1~步驟4,直至Ti到達終止溫度Tf,終止算法。
2.4" COR-GSA算法
本文結合GA和SA基本原理以及比幅測向誤差,提出一種COR-GSA算法適用于方位修正比幅測向求解式(12),應用于天線方向性參數離線辨識,解決傳統比幅測向算法精度低、傳統GA的停滯和局部收斂問題,側重于提高參數辨識的精度,而不在于收斂的速度。
COR-GSA算法主要流程如下:
步驟 1" 設定COR-GSA算法的初始溫度T0、自適應交叉概率參數pcmin和pcmax、自適應變異概率參數pmmin和pmmax、種群數量G、SA內循環迭代次數L、終止溫度Tf、溫度遞減系數q。
步驟 2" 隨機初始化種群個體z。
步驟 3" 方位誤差修正、適應度計算,依據式(10)進行方位誤差修正并依據式(12)計算適應度。方位誤差修正的原則為:當φlt;φr時,λ取1;當φgt;φr時,λ取-1;當φ=φr時,λ的值隨機確定。
步驟 4" 選擇,采取非線性尺度適應度進行“退火選擇”,并根據式(9)保留當前代最優個體遺傳至子代。第m代的第n個個體的選擇概率pmn可以表示為
pmn=efmn/Tm∑jk=1efmk/Tm(18)
式中:fmn為第m代的第n個個體的適應度值;Tm為第m代的溫度。當溫度較高時,不同個體之間的繁殖概率很接近。這可以保證最初的幾代個體具有高度的多樣性,這有助于避免陷入局部最優值。隨著溫度的降低,不同個體的繁殖概率之間的較大差異可以加快對全局最小值的搜索。
步驟 5" 自適應交叉,根據式(15)對優秀的父代基因段進行隨機交叉操作。
步驟 6" 自適應變異,將交叉得到的子代種群根據式(16)進行隨機變異操作,得到種群zp。
步驟 7" 對選擇后的種群進行隨機擾動,得到種群zn。一種有效的隨機擾動過程[34]為
zpn=zn+Δzj(Tm/T0)(η1tan(η2π/2))(19)
式中:zpn為擾動的新個體;zn為擾動前的個體;Δzj為第j個參數的搜索空間(j=0,1);η1,η2為隨機數的取值范圍為[-1,1]。
步驟 8" 方位誤差修正、適應度計算。
步驟 9" 根據式(12)從zn、zp種群個體中挑選出新一代種群。
步驟 10" 判定COR-GSA是否滿足收斂條件,若不滿足收斂條件則繼續非線性尺度選擇,否則結束。
COR-GSA算法的處理流程如圖3所示。
3" 實驗結果及分析
3.1" 測向雙通路接收機設計
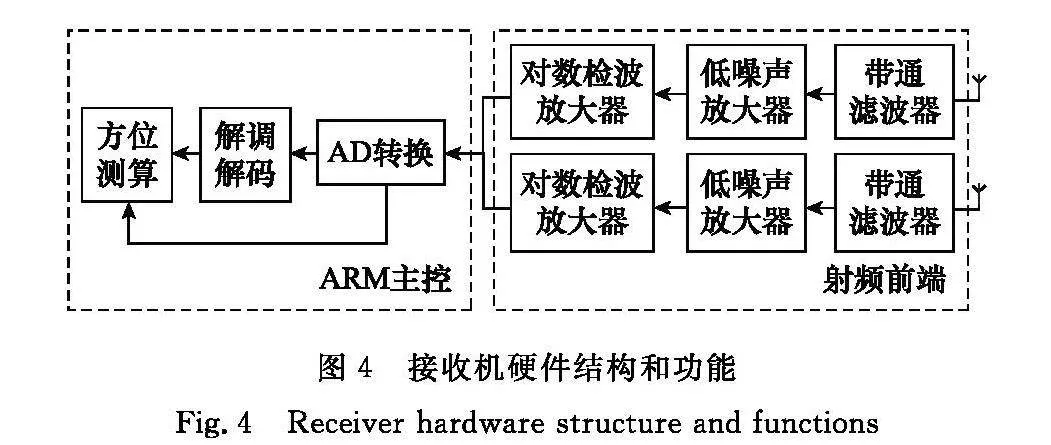
本文接收機主控芯片采用ARM公司研發的Cortex-M7芯片,其具有高達3.6 M的采樣率、高精度16位采樣分辨率,滿足2 M采集S模式二次雷達應答信號能力;并具有L1-Cache、浮點數處理單元功能,滿足對S模式二次雷達應答信號進行實時處理的需求。
測向雙通路接收機主要工作包含接收兩路天線信號、射頻前端信號處理、AD轉換,對S模式二次雷達應答信號解調解碼、方位測算,接收機的硬件結構和功能如圖4所示。
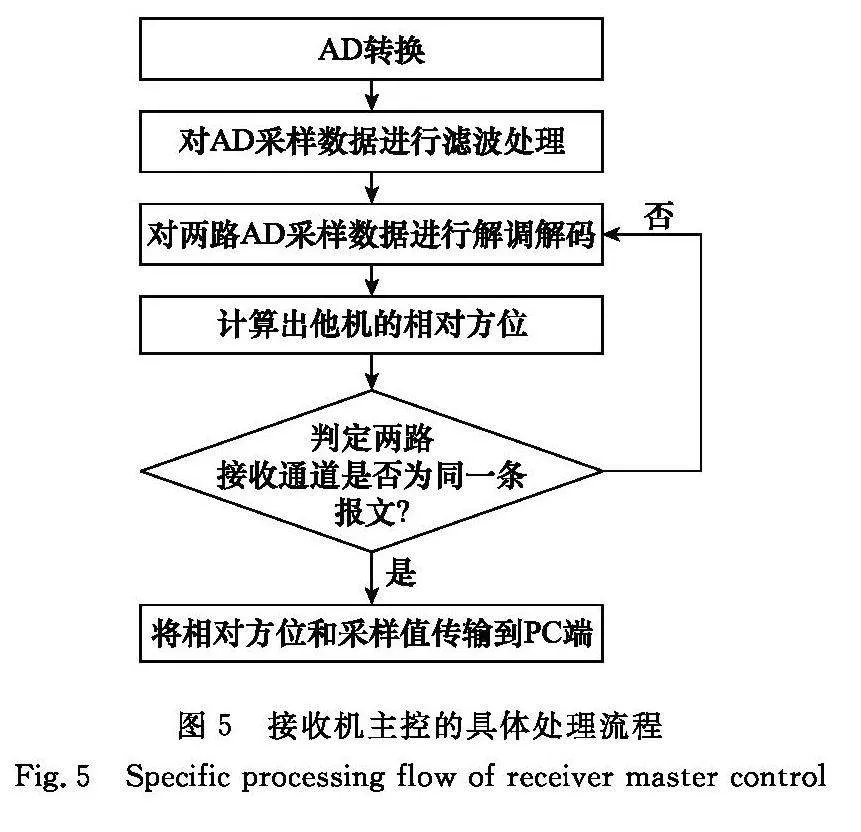
測向雙通路接收機主控具體處理流程如下:
步驟 1" 驅動片內兩路模數轉換控制器(analog to digital controller, ADC)以2 M固定采樣率采集兩路S模式二次雷達應答信號。
步驟 2" 對ADC采集信號進行濾波處理。
步驟 3" 對兩路ADC信號進行解調、解碼,解出他機航空器經度、緯度、高度數據。
步驟 4" 根據他機經度、緯度和本地的經度和緯度計算出飛機相對于當前位置的方位。
步驟 5" 判定兩路ADC接收的S模式二次雷達應答報文是否屬于同一條報文。
步驟 6" 若兩路ADC接收到的為同一條報文,將對應的S模式二次雷達目標的相對方位和對應的采樣值送至個人計算機(personal computer, PC)端。
步驟 7" 若兩路ADC接收到的不為同一條報文,則返回步驟3處理。
測向雙通路接收機主控處理流程如圖5所示。
3.2" 參數辨識實驗
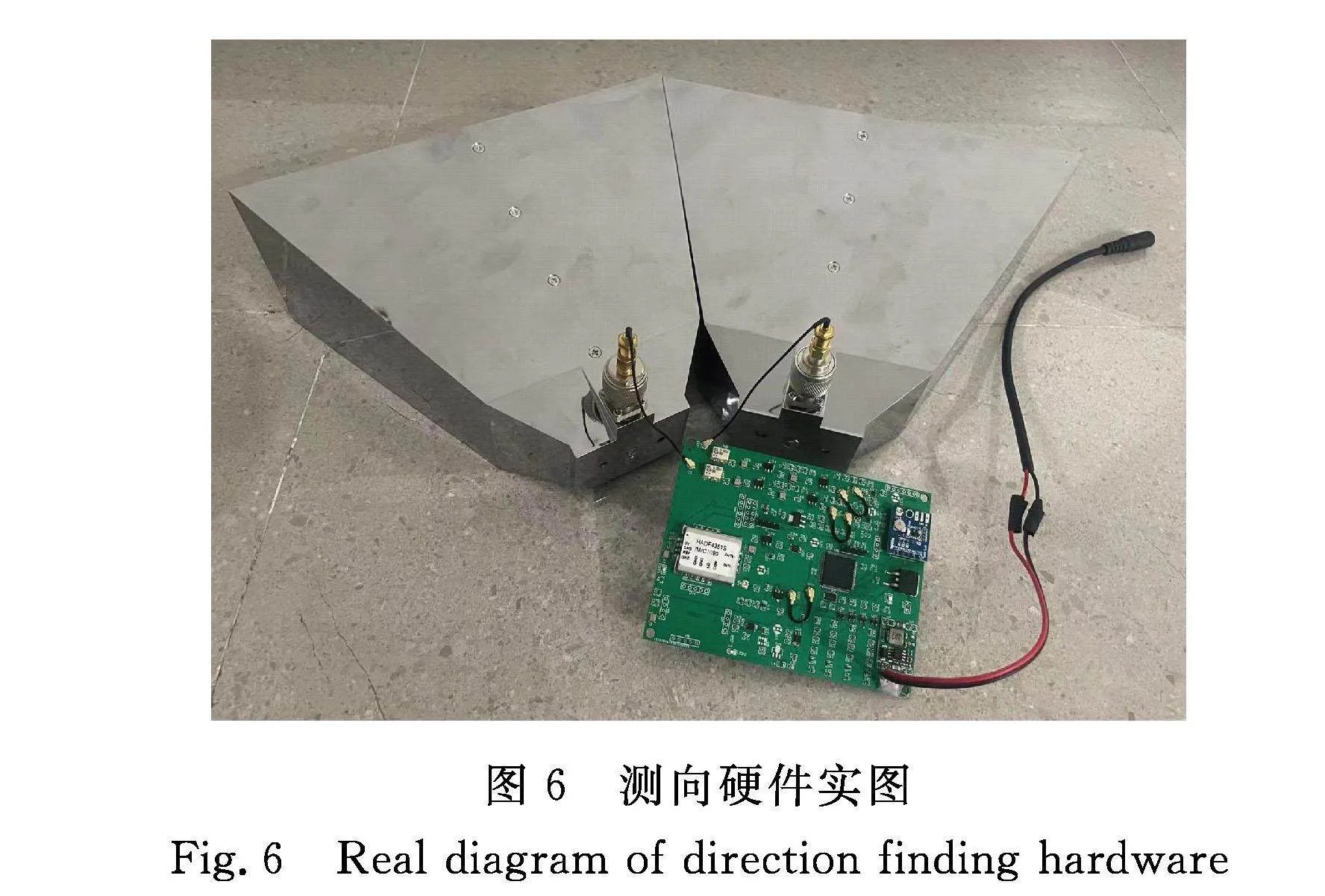
參數辨識實驗所用到的組件包含2根定向天線,1個測向雙通路接收機,如圖6所示。
測量場地選擇在高樓樓頂的空曠場地,將兩天線分別擺放在正東、正南方向,兩天線夾角為90°。將兩根天線與接收機兩個通路相連接,接收機通過通用異步收發器(universal asynchronous transceiver, UART)通信協議與PC端通信,PC端收集兩路采樣數據。
選取100條解算出方位在正東90°和正南方向180°之間的S模式二次雷達 ADC采樣數據作為系統輸入,分別采用GA、SA、未方位修正的遺傳SA(genetic SA, GSA)算法和COR-GSA算法對天線的方向性參數進行辨識。
3.3" 參數辨識結果
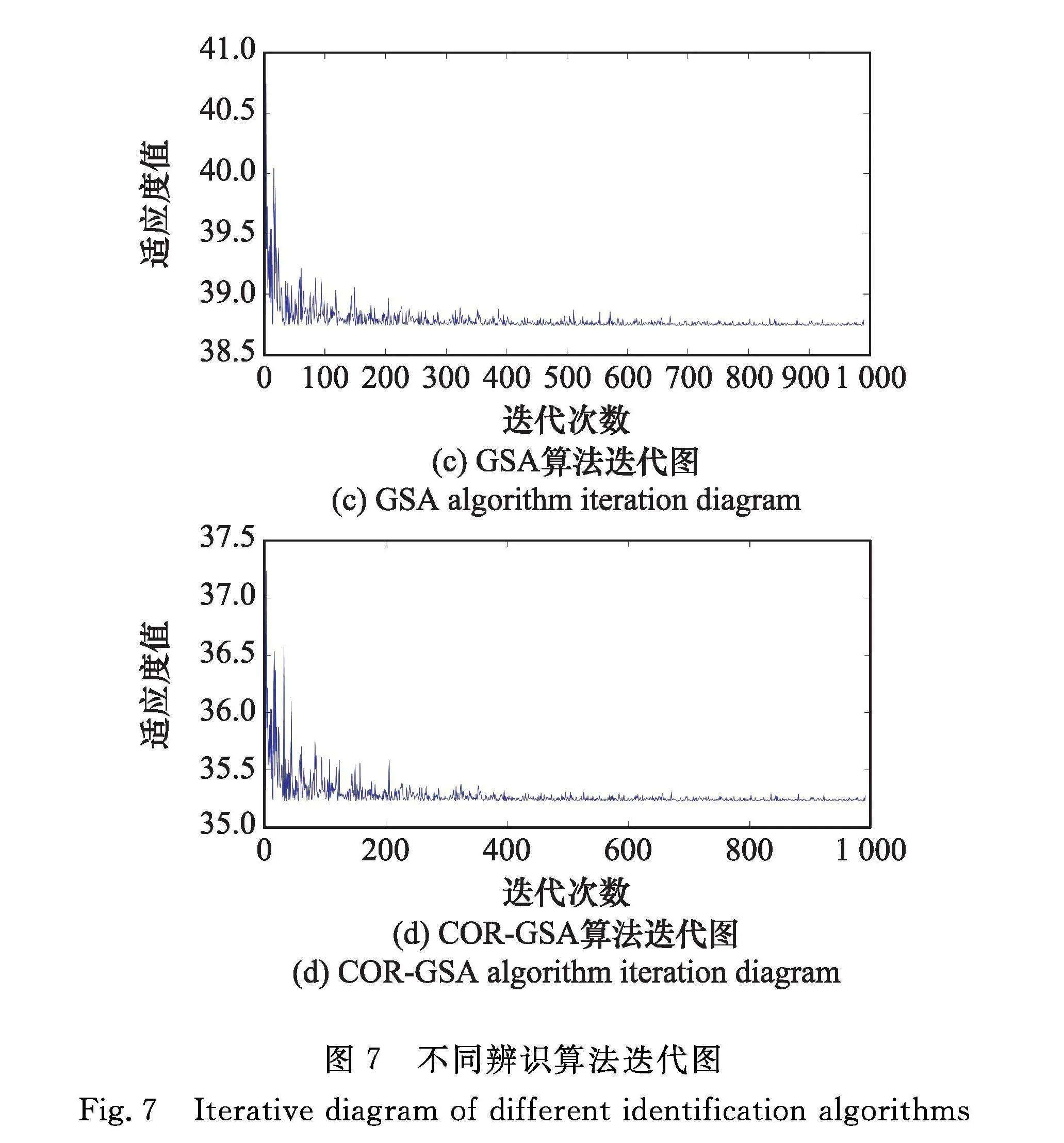
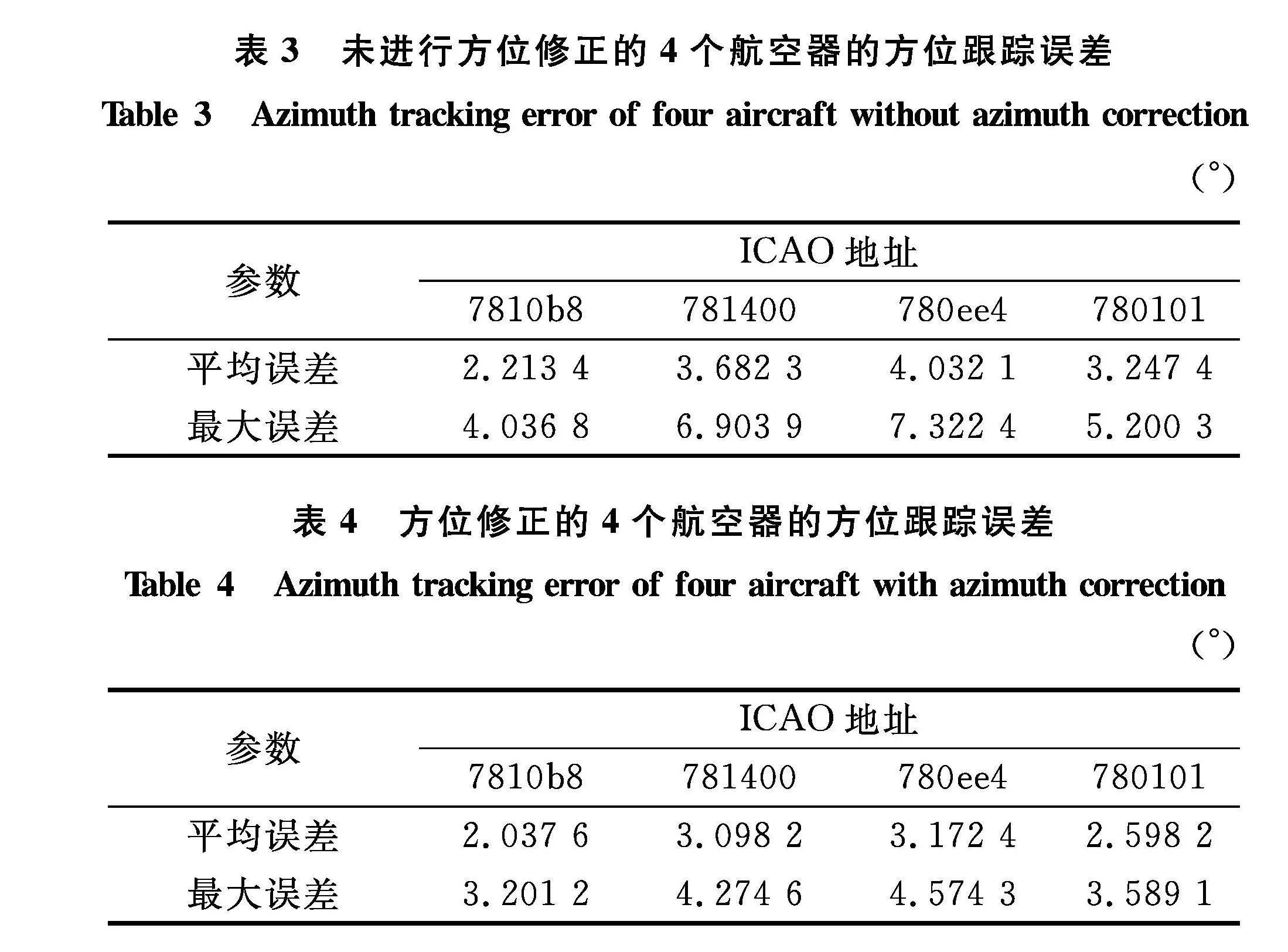
設定COR-GSA的初始溫度T0=100,終止溫度Tf=0.1,種群大小N=100,溫度遞減系數q=0.01。選取自適應交叉概率參數pci、pca分別為0.9、0.6,變異概率參數pmi、pma分別為0.02、0.1。選取自適應GA中k1、k2分別為0.1、12。此外,將待測參數k21設定在[0.796,1.3]的范圍內、θr設定在[30,160]的范圍內、γ1、γ2設定在[0,50]的范圍內,分別采用GA、SA、GSA,COR-GSA進行迭代,結果如圖7所示。
GA、SA、GSA的求解結果如表1所示,COR-GSA的求解結果如表2所示。
由圖7及表1可知,GSA較GA和SA具有更強的尋優能力。由圖7及表2可知,COR-GSA較GSA降低了傳統比幅測向算法的誤差,具有更優秀的辨識結果和測向結果。
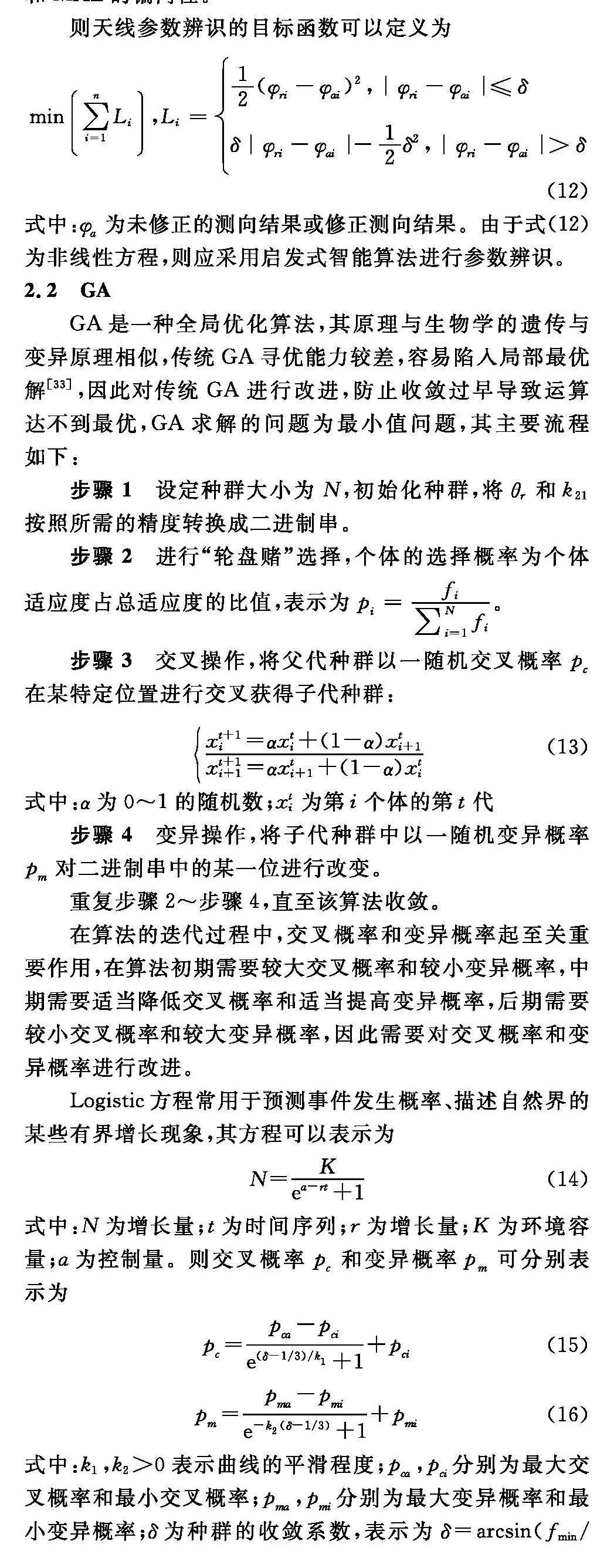
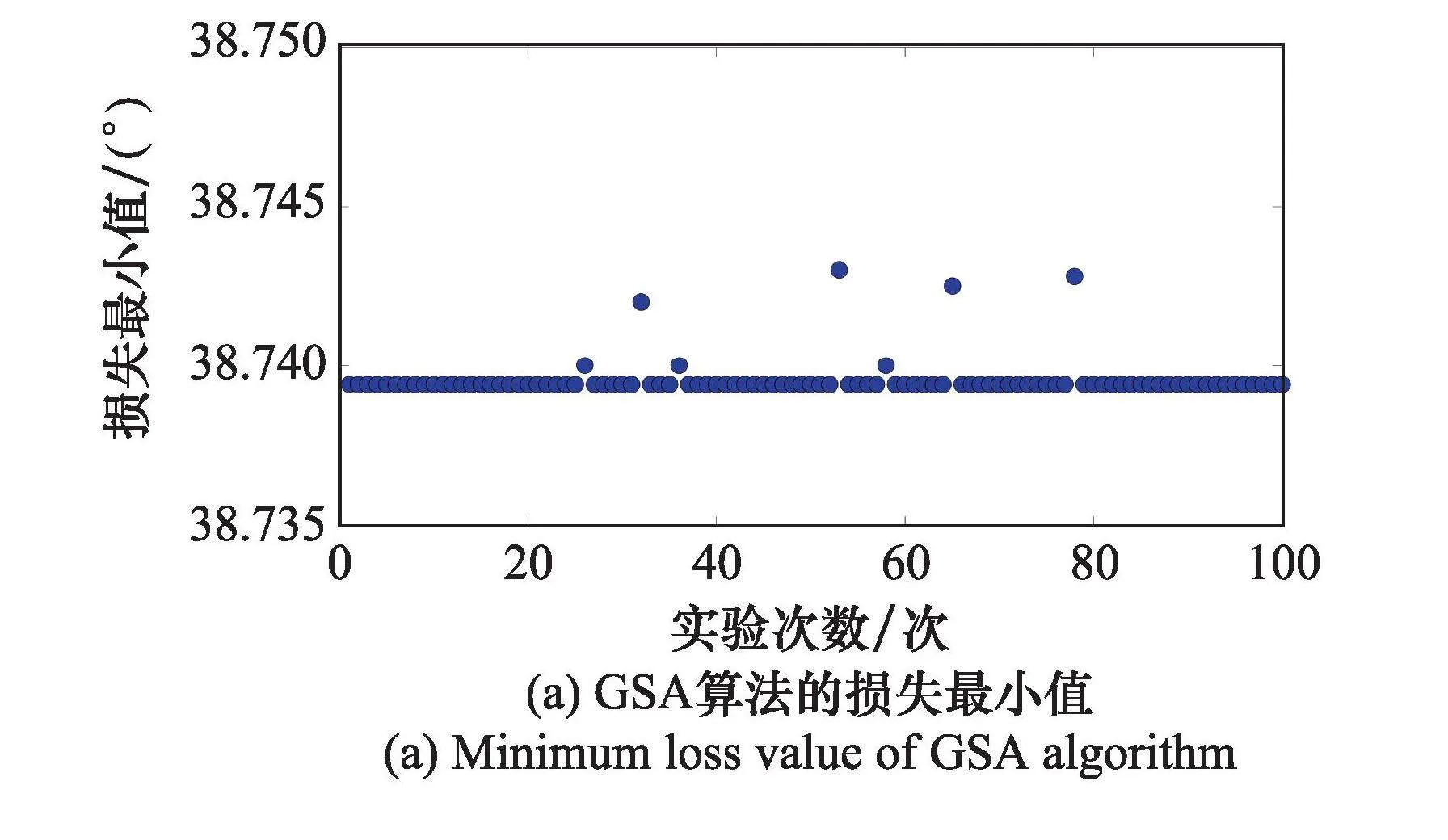
為了進一步驗證COR-GSA的先進性,將COR-GSA與GSA方法進行100次實驗,得到的結果如圖8所示。
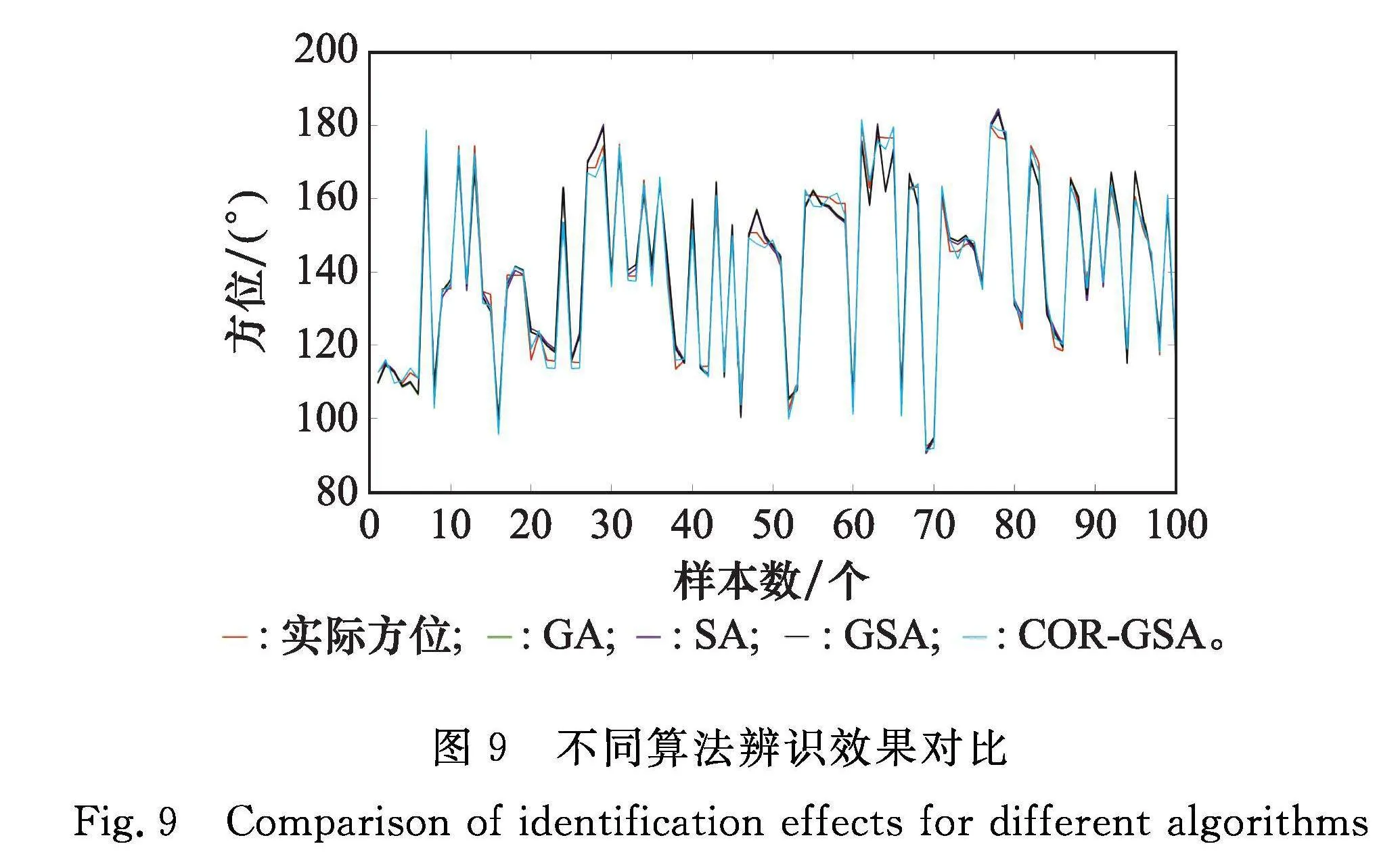
由圖8可進一步證明,COR-GSA算法具有較優的修正測向角能力。采用不同算法參數辨識可視化結果如圖9所示。
由圖9可看出,采用COR-GSA算法辨識出的參數進行方位計算的結果與實際方位最接近、誤差最小、辨識參數效果最好。
3.4" 結果驗證與方位跟蹤
辨識了測向模型參數后,則需要對參數的有效性進行驗證,利用接收機采集雙通路S模式二次雷達數據,解碼后提取1 000組方位在兩根天線擺放位置間的ADC采樣數據,利用辨識算法對識別出的天線方向性參數進行驗證,不同算法驗證結果如圖10所示。
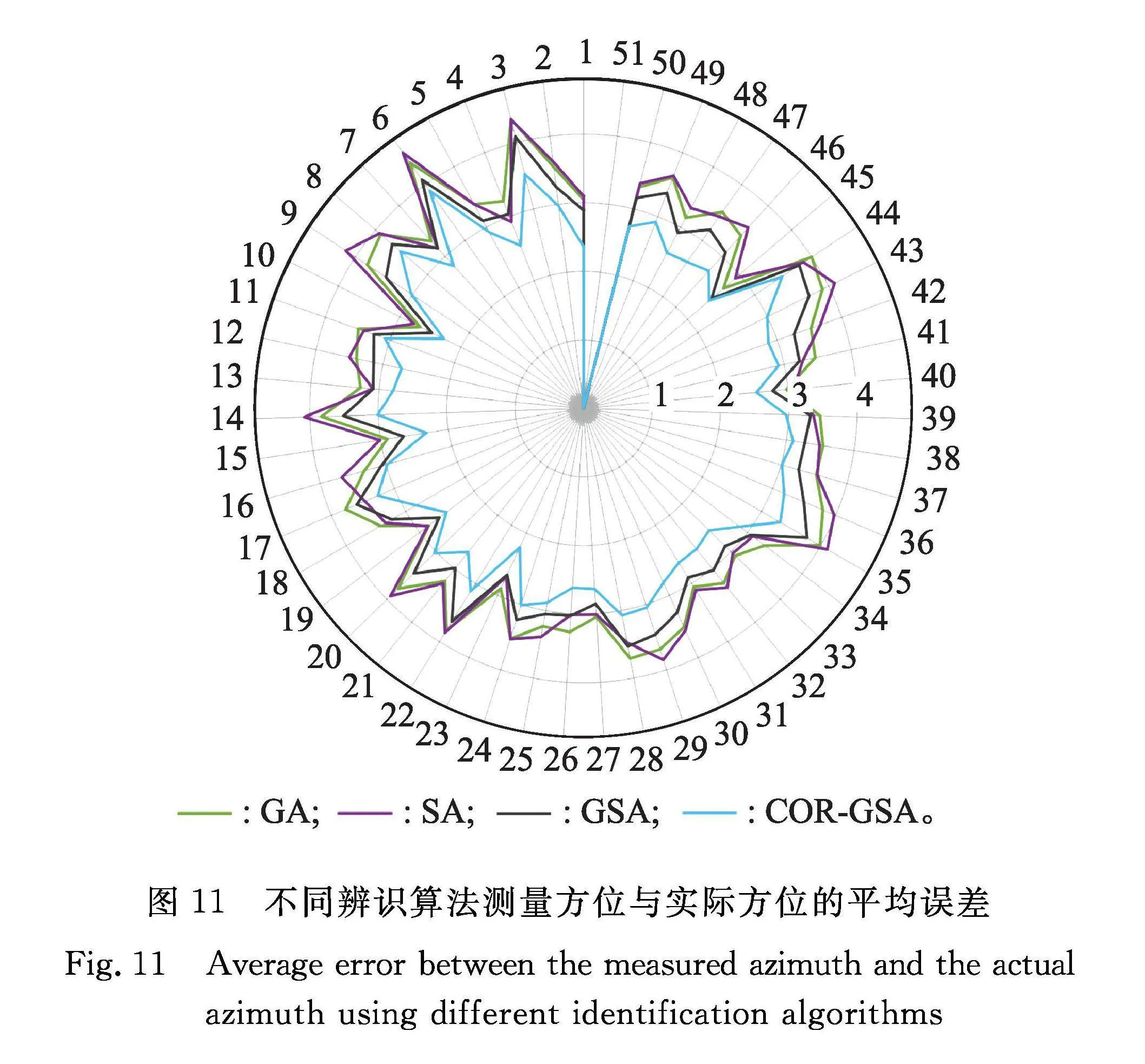
將1 000個測量方位以20個一組,分為分組2~分組51共50組,計算每組的平均方位誤差,不同辨識算法測量方位與實際方位的平均方位誤差如圖11所示,圖中1~4代表平均方位誤差。
由圖10和圖11可知,COR-GSA算法的平均誤差最低、與實際方位的貼合度最高。因此,本文提出的修正比幅測向模型以及COR-GSA算法能夠對準確地對天線方向性參數進行辨識,同時也驗證了優秀的測向性能。
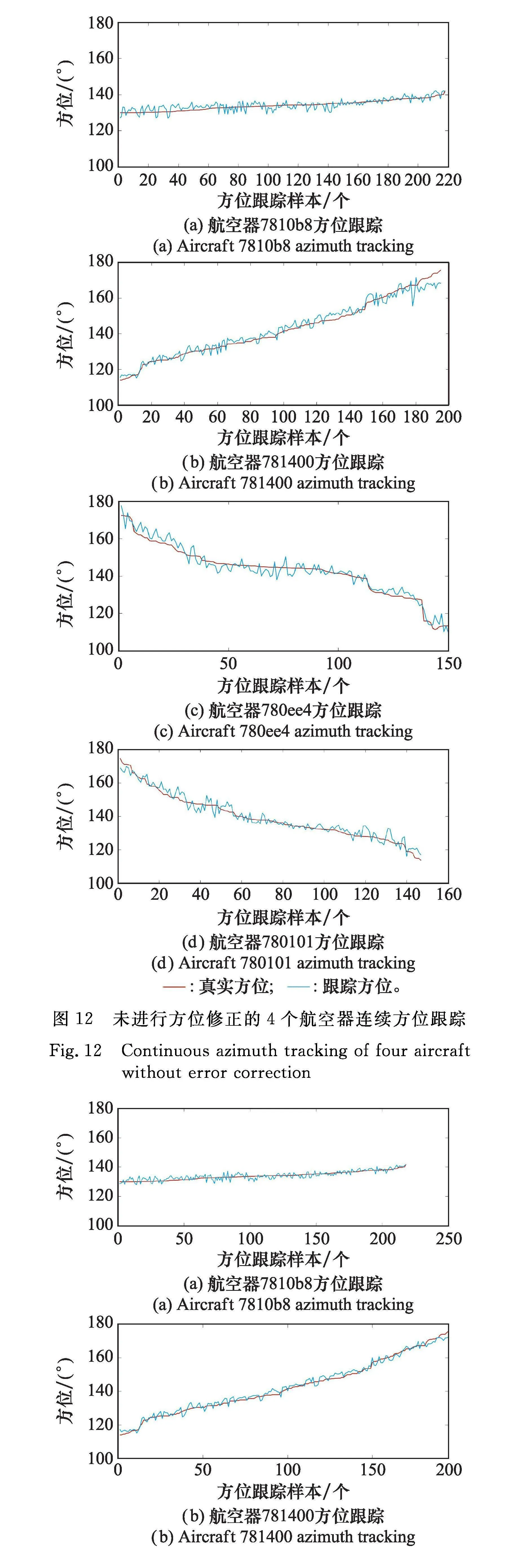
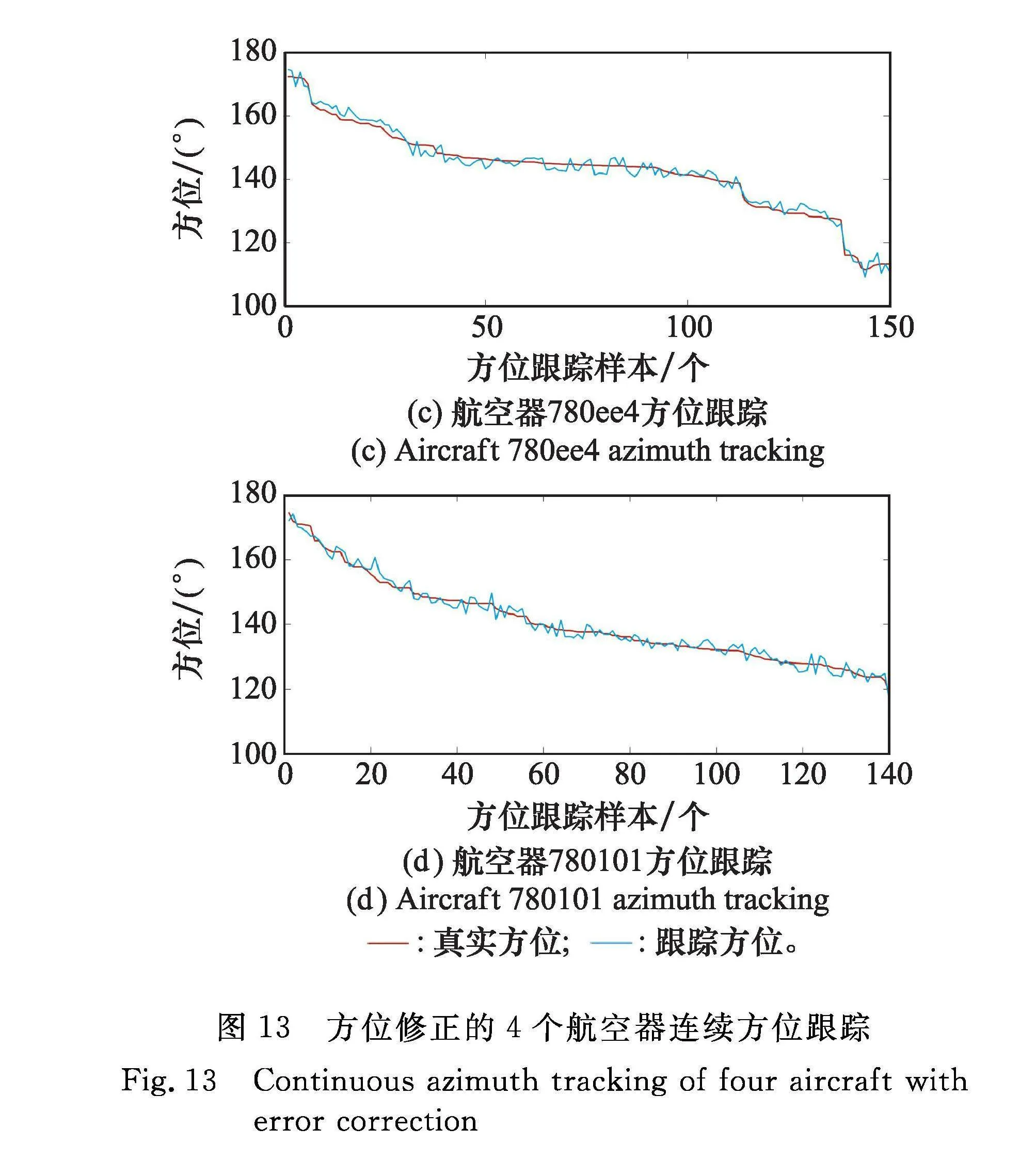
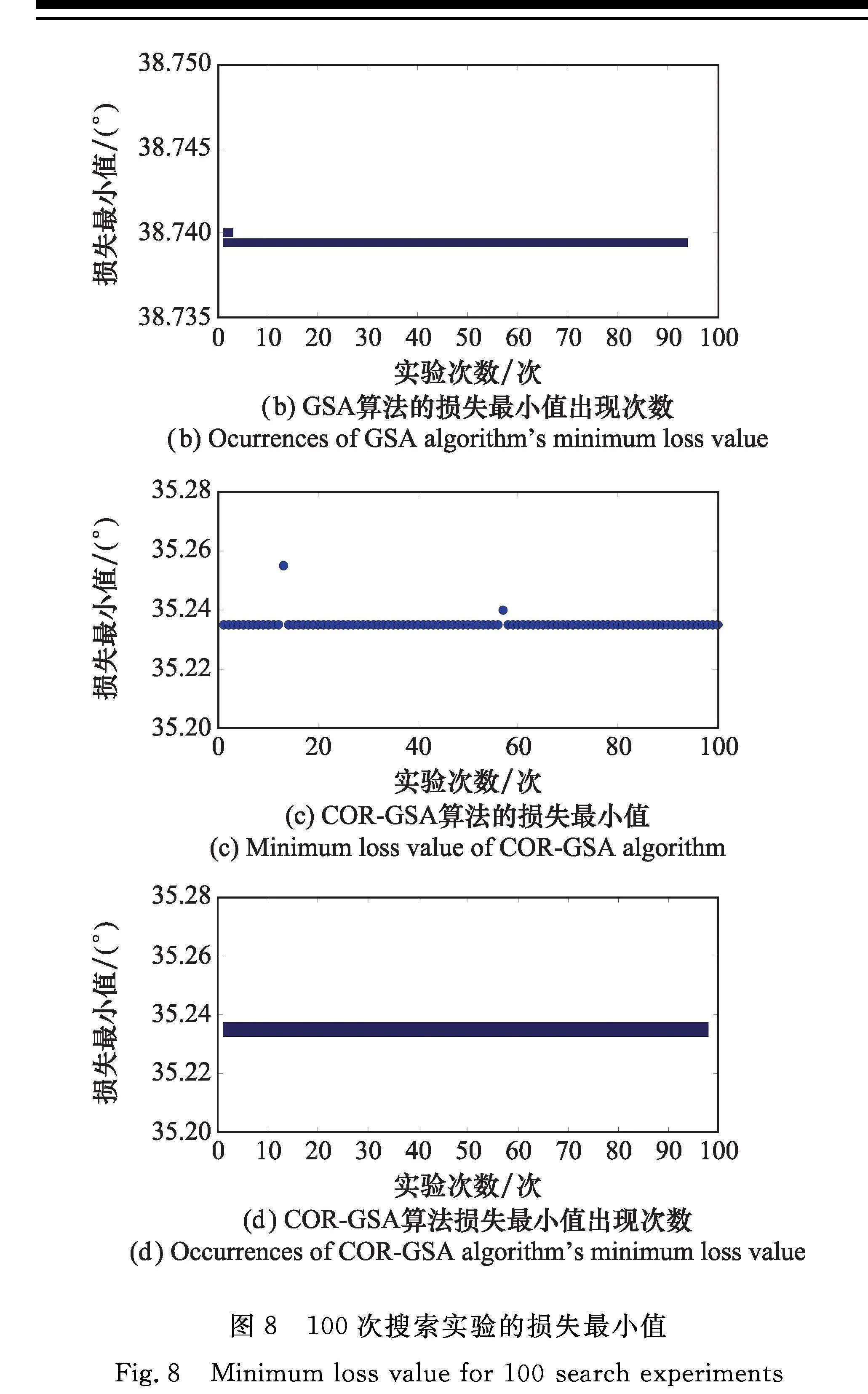
天線測向的目的是對雷達目標的定位跟蹤,因此需要驗證對同一航空器的測量方位的跟蹤效果。選取4個方位在正東90°至正南180°的航空器,分別采用GSA算法、COR-GSA算法辨識結果,即未進行方位修正和進行方位修正,對裝有S模式二次雷達的航空器進行連續的方位跟蹤,航空器跟蹤軌跡如圖12和圖13所示。
未進行方位修正的4個航空器方位跟蹤誤差如表3所示,方位修正的4個航空器方位跟蹤誤差如表4所示。其中ICAO(International Civil Aviation Organization)地址是一種唯一的24位標識符,用于標識全球每一架飛機。
由圖12和表3未經過方位修正的結果可得,航空器在兩天線等信號角附近測向誤差較小,方位跟蹤結果較好,在偏離等信號角較遠處,測向誤差較大,方位跟蹤結果較差。
印證了式(9)中偏離等信號角度對測向誤差的影響。同時經過方位修正的結果表明由COR-GSA辨識的天線方向性參數可以對航空器進行較精確的方位跟蹤,跟蹤精確度較GSA提高18.3%。
4" 結束語
本文基于未知天線方向性參數研究了航空器測向的問題:
(1) 在傳統比幅測向模型基礎上,分析了傳統比幅測向模型帶來的測向誤差,并基于測向誤差提出一種修正比幅測向模型進行測向誤差修正;
(2) 為了降低多根天線方向圖簡單疊加帶來的誤差,基于修正比幅測向模型,采用參數辨識的方法,分析了需要進行辨識的天線方向性參數;
(3) 基于前端測向處理框架與二次雷達應答信號特征,選取合適的主控芯片,設計了測向雙通路接收機;
(4) 基于GA和SA的基本思想,提出一種COR-GSA算法對定向天線的方向性參數進行離線辨識,并利用COR-GSA辨識結果對4架航空器進行連續的方位跟蹤,與未進行方位修正的跟蹤結果進行對比,平均跟蹤精確度提升了18%。
本文設計的測向雙通路接收機和具有精確方向性參數的天線可以對具有S模式詢問應答功能的航空器提供有效的測向思路。后期改進的空間在于選擇材質更優良、方向性更強的定向天線,并需要在空中、無遮擋的環境進行測向實驗。
參考文獻
[1] MARTELLI T, COLONE F, CARDINALI R. DVB-T based passive radar for simultaneous counter drone operations and civil air traffic surveillance[J]. IET Radar, Sonar amp; Navigation, 2020, 14(4): 505515.
[2] GABRIELA S, MIHAELA L, FLORIN C, AUGUSTIN S, et al. New air traffic surveillance systems[C]∥Proc.of the International Conference of Numerical Analysis and Applied Mathematics,2022.
[3] DEJAN K, DRAGAN D, MIRKO D, et al. Air traffic modernization and control: ADS-B system implementation update 2022: a review[J]. University of Belgrade-Faculty of Mechanical Engineering, 2023, 51(1): 117130.
[4] ALI B, OCHIENG W, MAJUNDAR A. ADS-B: probabilistic safety assessment[J]. The Journal of Navigation, 2017, 70(4): 887906.
[5] CHIOCCHIO S, PERSIA A, SANTUCCI F, et al. Modeling and evaluation of enhanced reception techniques for ADS-B signals in high interference environments[J]. Physical Communication, 2020, 42: 101171.
[6] RTCA DO-260B. Minimum operational performance standardsfor 1090 MHz extended squitter automatic dependent surveillance-broadcast(ADS-B) and traffic information services broadcast(TIS-B)[S]. Washington DC: Radio Technical Commission for Aeronautics, 2009.
[7] EUIHO K, KEVIN S. Blended secondary surveillance radar solutions to improve air traffic surveillance[J]. Aerospace Science and Technology, 2015, 45: 203208.
[8] MOHAMMADKARIMI M, RAJAN R T. Cooperative sense and avoid for UAVs using secondary radar[EB/OL]. [20230630]. https:∥arxiv.org/abs/2306.03046.
[9] KHOMENKO A, PODDBNYI S, BAKSHEEVA I. Improvement of secondary surveillance radar resilience to active interfe-rences[C]∥Proc.of the IEEE Wave Electronics and its Application in Information and Telecommunication Systems, 2019.
[10] RTCA DO-386. Minimum operational performance standards for airborne collision avoidance system xu (ACAS Xu)[S]. Washington DC: Radio Technical Commission for Aeronautics, 2020.
[11] LIU Z X, JIANG N, MA Q, et al. Study on the shipboard radar reconnaissance equipment azimuth benchmark method[C]∥Proc.of the AOPC Optical Test, Measurement, and Equipment, 2015: 401407.
[12] FERNANDES E, DA S, DA B, et al. 2.4~5.8 GHz dual-band patch antenna with FSS reflector for radiation parameters enhancement[J]. AEU-International Journal of Electronics and Communications, 2019, 108: 235241.
[13] DUSSOPT L, MEDRAR K, MARNAT L. Millimeter-wave Gaussian-beam transmitarray antennas for quasi-optical MYM s MYM-parameter characterization[J]. IEEE Trans.on Antennas and Propagation, 2019, 68(2): 850858.
[14] SAIDULU V. Dielectric cover layer thickness effect on rectangular microstrip antenna parameters[J]. i-Manager’s Journal on Electronics Engineering, 2021, 11(4): 817.
[15] ZHAI Y K, JIANG Z Y, MAI C Y, et al. A3PNet: antijam and accurate antenna parameters measuring network for mobile communication base station using UAV[J]. IEEE Trans.on Instrumentation and Measurement, 2022, 71: 5007515.
[16] RAJESWARI P, ANBALAGAN P. Cost effective android-antenna tool (AAT) for the parameter calculation of antenna in android platform[J]. Microprocessors and Microsystems, 2020, 72: 102946.
[17] EXPSITO I, SNCHEZ M, CUIAS I. Uncertainty assessment of a small rectangular anechoic chamber: from design to operation[J]. IEEE Trans.on Antennas and Propagation, 2020, 68(6): 48714880.
[18] 鄭修鵬, 李進杰, 陳鴻, 等. 全向單脈沖振幅法測向技術研究[J]. 艦船電子對抗, 2023, 46(1): 5154.
ZHENG X P, LIN J J, CHEN H, et al. Research on omnidirectional single pulse amplitude method direction finding technology[J]. Ship Electronic Countermeasures, 2023, 46(1): 5154.
[19] PRINCE T, ELMANSOURI M, FILIPOVIC D. Cylindrical luneburg lens antenna systems for amplitude-only direction-finding applications[J]. IEEE Trans.on Antennas and Propagation, 2023, 71(10): 79247932.
[20] AHMAD N, NAWAZ H, SHOAIB N, et al. Ambiguity resolution in amplitude comparison-based monopulse direction finding antenna systems[J]. IEEE Antennas and Wireless Propagation Letters, 2023, 22(10): 26052609.
[21] WAN H, LIAO B. Fourth-order direction finding in antenna arrays with partial channel gain/phase calibration[J]. Signal Processing, 2020, 169: 107380.
[22] LIU L T, YU T. An analysis method for solving ambiguity in direction finding with phase interferometers[J]. Circuits, Systems, and Signal Processing, 2021, 40(3): 14201437.
[23] 劉子奇, 臧欣蕊, 賈春, 等. 固定基線約束的低成本GNSS測向方法[EB/OL]. [20230630]. https:∥doi.org/10.13203/j.whugis20220572.
LIU Z Q,ZANG X R,JIA C, et al. A low-cost GNSS direction finding method with fixed baseline constraints[EB/OL]. [20230630]. https:∥doi.org/10.13203/j.whugis20220572.
[24] REN K. Direction finding using a single antenna with blade modulation[J]. IEEE Antennas and Wireless Propagation Letters, 2022, 21(5): 873877.
[25] CHEN L, WANG S L, JIANG H, et al. A novel combined estimation method of online full-parameter identification and adaptive unscented particle filter for Li-ion batteries SOC based on fractional-order modeling[J]. International Journal of Energy Research, 2021, 45(10): 1548115494.
[26] WANG Z T, CHAI J Y, XIANG X D, et al. A novel online parameter identification algorithm designed for deadbeat current control of the permanent-magnet synchronous motor[J]. IEEE Trans.on Industry Applications, 2021, 58(2): 20292041.
[27] 向啟均. 改進模擬退火優化遺傳算法的機器人動力學參數辨識[D]. 長沙: 湖南大學, 2018.
XIANG Q J. Improved simulated annealing optimization genetic algorithm for robot dynamic parameter identification[D]. Changsha: Hunan University, 2018.
[28] 王保民, 齊湛江, 閆瑞翔, 等. 基于隨機權重粒子群算法的SCARA機器人動力學參數辨識[J]. 西安交通大學學報, 2021, 55(9): 2027.
WANG B M, QI Z J, YAN R X, et al. Dynamic parameter identification of SCARA robot based on stochastic weight particle swarm optimization algorithm[J]. Journal of Xi’an Jiaotong University, 2021, 55(9): 2027.
[29] AHEREH T, RANJBAR N, MILAD M, et al. Parameters identification of photovoltaic solar cells using FIPSO-SQP algorithm[J]. Optik, 2023, 283: 170900.
[30] DE L C, LIMON S, TREVIO M, et al. Convolutional neural network for parameter identification of a robot[M]. Singapore: Springer Nature Singapore, 2023.
[31] IQBAL M F, KHALID Z, ZAHID M, et al. Accuracy improvement in amplitude comparison-based passive direction finding systems by adaptive squint selection[J]. IET Radar, Sonar amp; Navigation, 2020, 14(5): 662668.
[32] POISEL R. Antenna systems and electronic warfare applications[M]. Norwood: Artech House, 2012.
[33] LIU C, ZHANG F G, ZHANG H, et al. Optimization of assembly sequence of building components based on simulated annealing genetic algorithm[J]. Alexandria Engineering Journal, 2023, 62: 257268.
[34] LIN S, ASHLOCK J C, ZHAO G, et al. Genetic-simulated annealing optimization for surface wave inversion of shear-wave velocity profiles of geotechnical sites[J]. Computers and Geotechnics, 2023, 160: 105525.
作者簡介
袁偉力(1999—),男,碩士研究生,主要研究方向為空管設備研發、無人機監視。
湯新民(1979—),男,教授,博士,主要研究方向為新一代空中交通管制自動化系統、無人機運行服務與交通管理系統。
顧俊偉(1991—),男,博士研究生,主要研究方向為先進場面活動引導與控制系統。
