機器人運動規劃算法在工業系統中的應用研究
2024-11-06 00:00:00周鼎
數字通信世界 2024年10期
摘要:該文深入探討了機器人運動規劃算法在工業系統中的實際應用,包括基礎理論、制造業特定需求以及算法的詳細分類與對比分析,重點聚焦于算法在工業自動化生產線與倉儲物流系統中的應用,以在確保安全性的同時,實現效能的最大化。
關鍵詞:機器人;運動規劃算法;工業系統;應用效率
doi:10.3969/J.ISSN.1672-7274.2024.10.061
中圖分類號:TP 242;TP 312 文獻標志碼:A 文章編碼:1672-7274(2024)10-0-03
Research on the Application of Robot Motion Planning Algorithms in Industrial Systems
Abstract: This study delves into the practical application of robot motion planning algorithms in industrial systems, encompassing fundamental theories, specific requirements of the manufacturing industry, and a detailed classification and comparative analysis of the algorithms. The research primarily focuses on the application of these algorithms in industrial automation production lines and warehousing logistics systems, aiming to maximize efficiency while ensuring safety.
Keywords: robot; motion planning algorithm; industrial system; application efficiency
0 引言
工業自動化的迅猛發展極大地促進了機器人在制造業領域的廣泛應用,使其成為該領域不可或缺的關鍵構成要素。在這一蓬勃的發展態勢中,機器人運動規劃算法占據了核心地位,對于提升生產效率、增強適應能力和確保運行穩定性具有至關重要的意義。深入探索和研究工業領域的機器人運動規劃算法,不僅有助于有效解決制造過程中遇到的各種復雜動態問題,還能夠實現對機器人運動的精確控制和靈活處理,從而為工業自動化領域的科技創新與持續進步提供了關鍵性的技術支持。因此,對機器人運動規劃算法的深入探究,不僅在理論層面積累了豐富的研究成果,而且在實際應用中也展現出了顯著的成效與價值。
1 機器人運動規劃算法概述
1.1 運動規劃算法的基本原理
機器人運動規劃算法的核心理念蘊含了多個關鍵要素,其中路徑規劃占據首要地位。首先,路徑規劃的核心任務在于探尋機器人從起始點到目標地點的最優行進軌跡,這一過程中需要謹慎考慮周圍場景中的障礙物、活動限制以及各種約束條件。在此領域的核心環節涉及檢索策略的應用,諸如A*策略與Dijkstra策略等,它們的目標是在給定的拓撲空間內尋求到最短或最優的路徑。其次,運動學模型在機器人路徑規劃中同樣扮演著至關重要的角色。這一模型詳盡描述了機器人的動態性能,涵蓋了關節角度、速度以及加速度等多個關鍵參數。確保運動學模型的精確度對于制定精確的運動策略具有舉足輕重的作用,它直接關系到機器人運動的平穩性和效率。最后,機器人行駛路徑的安全性則依賴于高效的碰撞檢測機制。這一機制的主要功能在于確保機器人在行駛過程中不會與環境中的物體發生接觸,從而避免潛在的碰撞風險。為了實現這一目標,通常會運用幾何方法或傳感器數據進行實時的碰撞檢測,以確保機器人在整個運動過程中始終保持安全狀態[1]。因此,機器人運動規劃算法涉及多個復雜而關鍵的環節,每一個環節都對機器人的運動性能和安全性產生著深遠的影響。
1.2 針對工業領域機器人運動規劃的專屬需求
在倉儲與物流領域,機器人運動規劃算法對于提升操作效能及優化物流流程具有至關重要的影響。首先,該算法通過全面考慮倉庫內的貨架布局、貨物尺寸及質量等多重因素,并運用先進的智能優化路徑規劃技術,使得機器人能夠以一種高效且精確的方式執行貨物搬運任務。這不僅大幅減少了搬運時間,還顯著提升了物流運作的整體效能,從而確保貨物能夠在規定的時間內準確無誤地抵達目標地點。其次,在訂單揀選這一關鍵環節,機器人運動規劃算法通過運用最優化算法來設定揀選路徑,使機器人能夠高效地執行最短路徑搜索,并精確篩選出所需商品,不僅實現了高效倉儲管理的目標,還為倉儲與物流行業的持續發展注入了新的活力。因此,機器人運動規劃算法在倉儲與物流領域的應用,不僅極大地提升了操作效能,還顯著優化了物流流程,為行業的智能化、高效化發展提供了有力的技術支撐。
1.3 相關算法的分類與比較
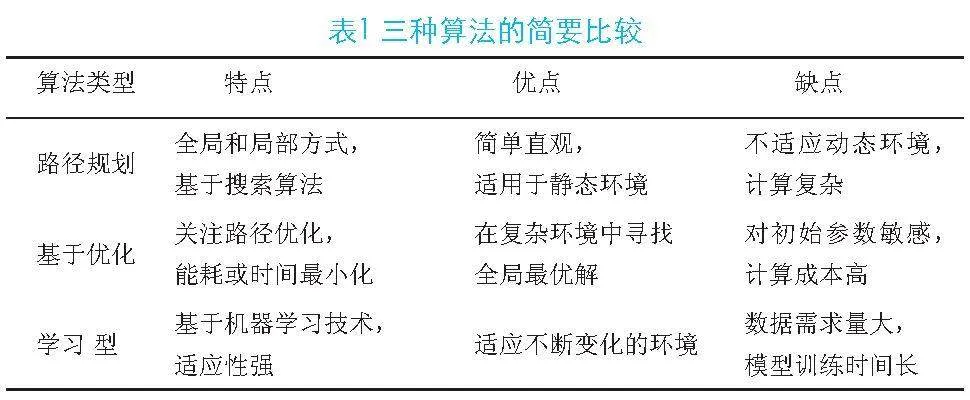
機器人的移動策略算法是一個復雜而多元的領域,主要可以被劃分為路徑規劃、優化算法以及學習型解決算法這三大核心部分。在路徑規劃方面,它涵蓋了全局與局部兩種不同層次的路徑設計策略。全局路徑規劃利用諸如A*算法和Dijkstra算法等經典方法,在指定的區域內精確地定位最佳路徑,以確保機器人能夠高效地從起點到達終點。而對于局部路徑規劃而言,它更加依賴于實時的感知能力,通過感知周圍環境的信息來防止碰撞,并動態地優化前行路線,以適應不斷變化的環境條件。為了確保在特定的限制條件下完成最優的路線選擇,優化技術發揮著至關重要的作用。例如,遺傳算法和模擬退火算法等先進的優化技術,被廣泛應用于機器人的移動策略中。這些技術旨在以最小的能量消耗或最少的時間來達到預定的目標,從而實現高效、節能的移動策略。此外,學習型算法也是機器人移動策略中的重要組成部分。這類算法結合了機器學習與深度學習等先進技巧,通過模型訓練來適應各種場景和任務的特定需求。這種增強的學習方式在機器人的運動規劃過程中特別明顯,它使得機器人能夠持續學習并提高自身的規劃效率,以更好地應對復雜多變的環境和任務挑戰[2]。因此,機器人的移動策略算法是一個綜合了多種技術和方法的復雜系統,它不斷地促進機器人在各個領域的應用和發展。
2 機器人運動規劃算法在工業系統中的
具體應用
2.1 工業自動化生產線中的應用
在制造業的自動化生產線環境中,機器人運動規劃算法的運用,對生產流程的各個階段產生了顯著影響,因此,獲得了更為高效且精確的生產流程優化成果。首先,在同時考慮裝配順序及工作站布局的前提下,針對裝配任務所設計的運動規劃算法,以確保機器人能夠在各工作站間流暢轉移,以實現產品組裝流程的優化。此外,局部路徑規劃的精準性使得機器人能夠在緊湊的裝配環境下實施精細且準確的操作,確保微型部件的精確位置及連接正確性,優化了裝配的精確度和效率。其次,在焊接過程中,精準的運動規劃對焊接質量具有至關重要的影響。運動規劃算法在優化過程中著重于體現焊接路徑的優化優勢,此外,還全面考慮了工件的形狀和材質等多個方面,以確保焊接區域的精確性和聯結力度達到預期效果。通過對焊槍移動路徑的精確控制,機器人展現出高效焊接操作的能力,在加速焊接效率的同時,確保焊接產品成果的卓越品質,在工業生產環節采納高自動化焊接方法。最后,搬運與裝卸活動的執行策略對物流收益及生產線整體效能產生直接影響。鑒于工作環境中有諸多阻礙物,運動規劃算法助力機器人精妙避開障礙物,實施高效且可靠的方法來進行原材料或成品搬運過程。此舉亦減少了人工介入的必要性,此外,物流效能優化確保了生產線持續穩定運行。
2.2 倉儲與物流系統中的應用
在倉庫與物流系統的運作中,機器人運動規劃算法的應用對于提升操作效能及優化物流操作流程具有至關重要的意義。首先,通過對倉儲內部貨架布局、貨物尺寸及其質量等因素進行深入分析,并采納先進的運動規劃算法,可以實現最優化的效果。這一過程不僅幫助機器人進行高效且準確的位置追蹤和貨物移位,還縮短了物資搬運的時間,從而加強了總體的物流效益,并確保了貨品能夠準時、準確地抵達預定位置。在訂單揀選階段,機器人利用智能優化技術來確定最短路徑,這一策略使得在電商旺季或訂單高峰時,機器人能夠迅速且高效地完成任務。這不僅顯著縮短了訂單的處理時間,還有效減輕了手動操作的負擔,降低了相關費用,從而確保了高效的倉儲管理。此外,在物流系統的裝卸過程中,精確的運動規劃同樣發揮著關鍵作用。它使得機器人能夠順利且高效地完成裝卸職責,減少了不可預測的變數,進一步提高了貨物的運輸效益。通過優化裝卸流程,機器人不僅能夠更準確地處理貨物,還能在更短的時間內完成更多任務,從而提升了整個物流系統的運作效率。因此,機器人運動規劃算法在倉庫與物流系統中的應用帶來了諸多益處,它不僅提升了操作效能,還優化了物流操作流程,為物流行業的持續發展注入了新的活力。
2.3 安全性與效率的權衡
算法在確保安全性方面能充分考慮環境變化及不確定性因素,利用前沿傳感器技術實現數據融合與實時環境感知,為確保機器人對障礙物、人力或其他動態物體的敏銳辨識。同時,分析機器人運動及動力相關屬性,協同運作的精準碰撞檢測及避障策略旨在減小潛在碰撞威脅。然而,安全性并非唯一的考慮因素,運動規劃算法還需兼顧效率的提升。在復雜環境中,過于謹慎的籌劃方式可能導致機器人在路徑上的非必要拖延,從而降低整體行動效能。因此,智能路徑優化策略需整合至算法設計環節,基于實時數據調整行進策略以提升效率,務必確保機器人能在最短時間內執行完畢相關任務。動態調整策略在平衡安全與效率的矛盾方面具有重要作用。機器人利用實時調整算法參數,以實現在不同環境下安全與效率的均衡[3]。例如,在繁多的人群中,算法應著重確保個體安全,降低行駛速率以避免碰撞現象的發生;在空間寬敞的環境下,可以調整策略以提高運動效能,在保障安全的基礎上優化效能。
3 機器人運動規劃算法的未來發展
3.1 發展趨勢與前景
深度學習方法在機器人行為策略領域的應用是未來的主要發展趨勢。該技術以其卓越的識別能力和自主學習功能,廣泛應用于機器人系統,特別是在復雜多變的環境中,其與機器人的高效整合將使其表現更加出色,提升智能運動規劃的效能。深度學習在規劃階段能夠更有效地應對不確定性和噪聲,從而增強系統的穩定性。
機器人協同規劃領域的研究正受到廣泛關注。隨著工業生產和物流系統的持續優化發展,多機器人系統在協同作業場景中的應用日益增多。解決多機器人協同運動規劃問題已成為未來研究的關鍵焦點,旨在提升生產線的總體性能和工作效率。探討分布式算法與協同控制策略的應用可能存在某些關聯性,特別是涉及機器人領域的信息共享和通信方面的研究。
3.2 技術上的挑戰與解決方案
隨著機器人應用場景的不斷復雜化,高維與非線性問題已成為關鍵難題。針對該挑戰,可以采用一種針對優化算法的精細化調整策略,如遺傳優化方法、模擬退火策略等,探索多元空間以優化檢索策略效能。同時,采用如八叉樹、RRT(隨機快速搜索樹)等高效數據結構進行分析,能夠顯著減輕難題的煩瑣程度從而提升規劃的執行效率。近似算法的運用能在適宜的計算時間內尋找到較為優秀的解決方案。另外,運動規劃領域實時性與計算效率的矛盾始終未曾緩解。為了順應工業生產和物流場景中機器人對高效決策的要求務必運用高效規劃策略。此外,利用硬件加速和并行計算技術,如GPU(Graphics Processing Unit)和多核處理器,可以加速規劃過程,提高實時性和計算效率。
4 結束語
機器人運動規劃算法在工業領域的探究與實際運用對整個產業產生了顯著的影響,并在其中發揮著關鍵作用。然而,仍然需要面對諸如惡劣環境的不確定性、實時計算與效率優化等多方面的挑戰。在深度學習、多機器人協同以及仿生學等范疇,機器人運動規劃算法的運用為工業領域帶來卓越的技術解決方案,進一步鞏固其領先地位。
參考文獻
[1] 鄒凜浩,林有希,蔡建國.移動機器人運動規劃算法研究進展[J].機床與液壓,2021(23):154-158.
[2] 姜國杰,王鵬,劉曉囡,等.面向異型結構件巡檢的機器人點對點運動規劃算法[J].制造業自動化,2023(5):187-191,206.
[3] 羅冠聰.焊接機器人運動規劃與任務規劃算法研究[D].廣州:廣東工業大學,2021.