FSD與V2X的優劣對比
2024-11-06 00:00:00李詠東
數字通信世界 2024年10期
摘要:特斯拉將準備FSD引入中國,距離自動駕駛又近了一步。自動駕駛的FSD與車聯網的V2X自動駕駛相比,誰更有優勢?該文從原理、人工駕駛、系統的角度,對FSD與V2X的優劣做了對比。從實現的角度看,FSD更容易實現;從成本的角度看,FSD成本更低;從人工駕駛角度看,FSD缺少了聲音傳感器;從定位角度看,FSD無法在整車偏移或偏轉時準確定位;從系統角度看,FSD是單機操作,容易實現,但效能無法與車聯網的V2X自動駕駛匹敵;V2X涉及基站系統、需要全網元統一接口,投資巨大,互聯互通困難,建設周期長,尚無商業網實踐經驗。PSD與V2X各有所長,PSD適用于智能網聯的初級階段,V2X適用于智能網聯的中、后期階段。
關鍵詞:完全自動駕駛(FSD);車聯網(V2X,Vehicle-to-Everything)
doi:10.3969/J.ISSN.1672-7274.2024.10.023
中圖分類號:TP 18 文獻標志碼:A 文章編碼:1672-7274(2024)10-00-03
Comparison of the Advantages and Disadvantages of FSD and V2X
Abstract: Tesla's FSD is ready to be introduced to China, one step closer to autonomous driving. Who has the advantage of autonomous FSD versus connected V2X autonomous driving? This paper compares the advantages and disadvantages of FSD and V2X from the angles of principle, manual driving and system. From the perspective of implementation, FSD is easier to implement; From the cost point of view, FSD cost is lower; From a manual driving point of view, the FSD lacks a sound sensor; From the positioning point of view, FSD can not be accurately positioned when the vehicle is offset or deflected; From a system point of view, FSD is a stand-alone operation, easy to implement, but the performance cannot match the V2X autonomous driving of the car network; V2X involves the base station system, the need for a unified interface of the whole network element, huge investment, difficult interconnection, long construction cycle, there is no practical experience in commercial networks. PSD and V2X have their own advantages, PSD is suitable for the initial stage of intelligent network connection, and V2X is suitable for the middle and later stages of intelligent network connection.
Keywords: FSD; V2X
1 概述
1.1 FSD
FSD可將攝像頭獲取的圖像數據輸入到處理單元后,能直接輸出例如轉向、加速、制動等車輛控制指令來控制汽車行駛。它更像是一個人類的大腦,不需要高精度地圖以及激光雷達,僅依靠圖像數據輸入就能分析并輸出控制策略。特斯拉的自動駕駛系統依賴基于規則的判斷,依靠汽車上搭載的攝像頭識別車道、行人、車輛、標志和交通信號燈等,通過編寫代碼來應對各種情況。當前,特斯拉的FSD V12已能實現“端到端”的人工智能自動駕駛。
1.2 FSD的特點
(1)FSD采用全攝像頭獲取信息。FSD完全依賴攝像頭獲取圖像,通過算法積累、學習的方式判斷交通情況[1]。
(2)其具有AI功能。通過不斷迭代來完成升級、學習、完善。FSD V12中的AI神經網絡通過學習,不需要規則和條件判斷代碼,通過大量視頻訓練得到結果[2]。
(3)絕大部分的場景FSD都有收錄,可以根據這些場景直接執行正確的操作,這需要采集大量的數據,而且需要累積經驗。
(4)特斯拉第三季度財報顯示FSD測試總里程超8億千米,說明FSD可靠性已經在國外大量實地驗證,并且不需要使用高精度地圖。完全自動駕駛(FSD)將使車輛的利用率翻五倍,成本就變成了五分之一,而且使車主不用遭受駕駛的煎熬[3]。
(5)FSD的2022年事故發生概率明顯低于人類駕駛平均事故率[4]。
(6)根據具有科學價值的、明晰的、系統性的、基于在線評價和消費者期望的問題體系評估,整體上,FSD確實比人類駕駛安全性要高[4]。
(7)通過貝葉斯推理可知,新能源汽車嚴重突然失控的可能性為45%,輕微突然失控的可能性為90%,突然失控事故不發生的可能性為97%。實際上,97%的不發生率在整體上是可以接受的[5]。
FSD存在問題:
(1)因為FSD參考系是車,所以當參照系發生抖動、側翻時、FSD定位是不準確的。
(2)當遭遇大霧、大雨、大雪等惡劣天氣時,FSD難以解決視距內有障礙阻擋問題。
1.3 V2X的特點
(1)在V2X車聯網中,車、基站、網絡、行人、燈柱、紅綠燈等車聯網元相互關聯、消息互通,可以獲得超視距信息。
(2)V2X可以多角度反饋場景,避免誤判。還有,相鄰車、附近基站、行人、燈柱、紅綠燈標志所處的空間位置不同、傳感器不一樣,可以提供客觀數據,從而準確判斷汽車狀態。
V2X存在問題:
網絡阻塞。當汽車堵車時,各V2X模組在空間上擁擠在一起,使用相同的頻率,大功率發射,就會出現無線網絡干擾,導致無法通信,這個問題需要優化解決。
網元歸屬于不同的體系,協調難度大。基站屬于中國移動、中國電信、中國聯通等運營商,屬于電子行業;汽車屬于不同個人、單位;燈桿、紅綠燈等屬于市政管理部門、交警部門,因此,當需要協調一致工作時,需要橫跨多行業、多單位,協調難度很大。
V2X車聯網需要大規模建設V2X網元,投資成本較大,包括基站擴容,建設燈桿,路邊標桿等,實施難度大。
車聯網建設需要較長時間。與基站連接的UU接口已完成,車車、車人、車物等的PC5接口已經完成統一(PC5接口定義、場景定義),完全實現需要認證、車廠、模組、芯片整個產業鏈步調一致,這需要時間。車聯網的網絡規劃、優化也需要時間。可交互的、兼容性強、可靈活配置的互聯互通接口也需要大量時間調試。同時,需要建設覆蓋廣、速率高的無線網絡,這也需要時間。
2 優劣勢
2.1 FSD與人工駕駛的區別
(1)沒聲音。駕駛員可以聽到周圍環境的聲音,由此可以預判物體、行人、前車、后車狀態,但是FSD沒有聽覺。假設人工駕駛沒有聲音,會增加事故概率,FSD則不然。
(2)經驗積累。人工駕駛存在經驗積累,而成熟的FSD是大量數據、經驗、場景的積累,相當于一個經驗老到的司機。
(3)視野。FSD會在汽車的四周都安置攝像頭,因此,視野比人工駕駛要寬得多。
2.2 FSD與雷達的區別
(1)精度。雷達距離判斷較FSD準確,因為雷達測距通過毫米波工具完成,因此精度可達到毫米級別,因此更為準確。FSD通過視頻測距,通過算法估算兩物體間距離,準確度難以達到毫米級別。
(2)判斷。雷達成像較容易誤判,不如使用視頻圖形方法判斷。FSD在成像、圖形判斷方面更強。
(3)傳輸。雷達容易受到傳輸介質的影響,導致誤判距離。而視頻判斷依據較直接,不容易受環境影響。
(4)夜間。雷達夜間工作正常,視頻判斷可能受較大影響。
(5)成本。安裝雷達成本增加。FSD前期需要大量數據積累,成本也高。
2.3 FSD與V2X區別
(1)實施。FSD容易實施,具有極高可操作性,為單機操作。V2X是一個系統工程,極不容易實施。
(2)廣度。FSD處理范圍為視距以內,而V2X為超視距,在控制車輛廣度方面高多個量級。
(3)可行性。FSD已經有大量的應用驗證其可行性,但V2X僅僅完成試驗場測試。
(4)條件。V2X要求高精度地圖、高精準定位、互聯互通,FSD完全依賴視頻判斷,對外部條件要求較低。
2.4 FSD可能會出現的問題
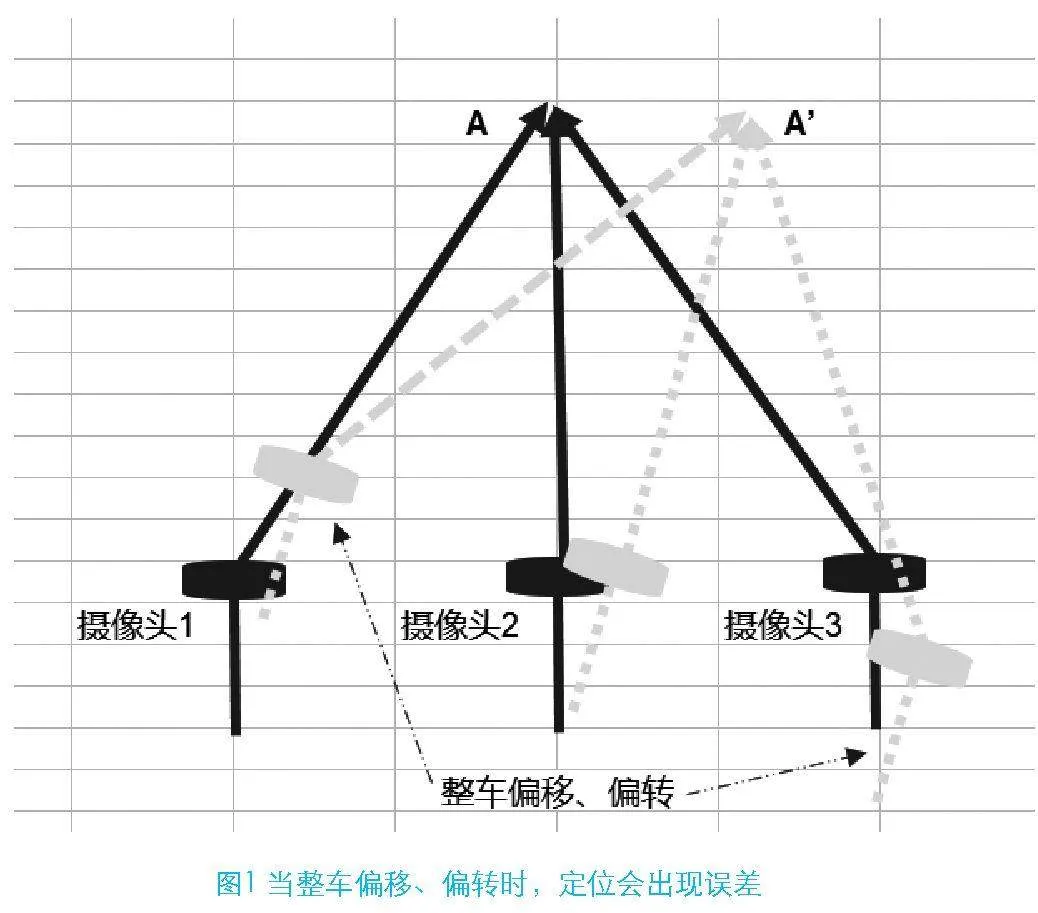
FSD采用攝像頭定距,攝像頭均安裝在汽車上,因此,攝像頭確定的位置均以汽車為參照系。當汽車這個坐標系產生偏移或角度偏轉時,攝像頭獲得的物體定位相對地面坐標系來說就不再準確,由于導航以地面為參照系,因此FSD的導航可能不再準確。這是存在風險的,具體場景以下。
(1)非平整路道路。FSD的參照系為攜帶攝像頭的整車,當整車出現偏移及角度偏轉時,FSD得到的位置需要加入系統偏移變量,才能得到確切位置。而汽車的偏移及角度偏轉,是極難測量的,特別是僅通過視頻測量更難以得到準確數據,從而導致誤判;如圖1所示,當整車偏移、偏轉時,A’會被誤判為A位置。
(2)雨霧天氣。由于雨霧會導致視距受限和誤判,已有北美FSD用戶在雨霧天差點沖撞行進火車的事故。
(3)超視野問題。如在十字交會路口,視線被樓房或樹木等阻擋物阻擋,無法通過視頻提早預知。
(4)視野盲區。在轉彎及下坡路段等超視野場景,容易發生事故。
(5)強光。當對向車輛使用強光燈時,可以令駕駛員瞬間失明,這時,FSD的攝像也會過曝,產生誤判。
(6)車道識別。FSD識別車道,首先要求采用高清晰度的攝像機,同時有完善的算法。類似重慶這樣多山、多高架橋、多隧道的地貌,對于FSD將是一個挑戰。
(7)調度。FSD是單機模式,無法支撐智能調度、動態調整功能。
3 結束語
FSD積累了大量的實測數據,建立了完善的單機模型,并通過其學習系統不斷學習、優化,確保FSD等同于一位具有豐富駕駛經驗的駕駛員,據統計,FSD的安全系數已超越一般駕駛員。FSD還具有成本低、試驗早、累計經驗快、有事實數據支撐等優點,可行性高。但是,FSD存在無聲音輔助、車輛偏移時會出現定位誤差的缺點;同時,相對車聯網,FSD也存在無超視距數據、無法提前預判、沒有智能調度、惡劣環境容易誤判等缺點,因此,在智能網聯初級階段,FSD是可行的自動駕駛方案,而在智能網聯的中后期,車聯網的V2X技術將逐步成為自動駕駛的主流技術。
參考文獻
[1] 朱琳.特斯拉FSD Beta路測是非[J].經營者(汽車商業評論),2022(3):64-66.
[2] 朱世耘.特斯拉正在走一步險棋?[N].國際商報,2022-02-11(008).
[3] 陳念航.挑戰特斯拉FSD,百度Apollo推出領航輔助駕駛ANP[J].企業觀察家,2020(12):66-67.
[4] 習揚.基于在線評價和消費者期望的產品推薦排序方法研究[D].沈陽:東北大學,2021.
[5] 張順,周娟.基于STPA與模糊BN的新能源汽車安全性分析方法研究[J].現代電子技術,2024,47(8):18-24.