基于間接式測量輪軌力的重載機車輪軌力智能監測系統研究
2024-11-02 00:00:00侯明明王炯
機械 2024年10期







摘要:輪軌動態接觸力直接關系著機車車輛系統的動力學性能、軌道振動響應及其結構傷損情況。因此,基于間接式測量輪軌力方法,提出重載列車輪軌力智能監測系統技術方案,設計輪軌力監測點包括一系簧力、一系簧橫向位移等參數,應用了現代傳感技術、虛擬儀器技術、嵌入式技術和列車通信技術。以某八軸重載列車中部機車為例,在車下安裝加速度、應變、位移等傳感單元,對各傳感器進行標定,并通過數據采集與數據處理等方法計算輪軌垂向力、輪軸橫向力、脫軌系數等安全性指標。將間接方式得到的輪軌力通過動力學仿真進行驗證。該監測系統能夠實現輪軌垂向力等安全性指標的自動采集、自動處理、自動分析與傳輸,為重載鐵路的智能化與信息化提供重要技術支撐。
關鍵詞:重載鐵路;輪軌力;智能監測;服役安全
中圖分類號:U260 文獻標志碼:A doi:10.3969/j.issn.1006-0316.2024.10.010
文章編號:1006-0316 (2024) 10-0073-08
Intelligent Monitoring System of Heavy-Haul Locomotive Wheel-Rail Force
Based on Indirect Measurement Method
HOU Mingming,WANG Jiong
( Guoneng Transportation Technology Research Institute Co., Ltd., Beijing 100000, China )
Abstract:The dynamic wheel-rail contact force is directly related to the dynamic performance, rail vibration response and structural damage of the locomotive and vehicle system. Based on the indirect measurement method, this article proposes the technical solution of the heavy-haul locomotive wheel-rail intelligent monitoring system. The design of the rotary rail force monitoring item includes parameters such as one-series reed force and one-series springs horizontal displacement. Virtual instrument technology, embedded technology, and train communication technology has been applied. Take a certain eight-axis heavy-duty train in the middle of the train as an example. With acceleration, strain, displacement and other sensors installed under the vehicle, each sensor is calibrated. Data processing and other methods are used to calculate safety indicators such as the vertical force of the wheel track, the horizontal force of the wheel axis, and the derailment coefficient. The automatic collection, automatic processing, and automatic analysis and transmission of safety indicators provide important technical support for the intelligent and informatization of heavyhaul railways.
Key words:heavy-haul railways;wheel-rail force;intelligent monitoring;service safety
隨著我國2萬噸重載組合列車運用的不斷深入,長期服役過程中的各種問題隨之暴露,極大制約了我國重載鐵路的長遠發展。由于重載鐵路線路條件復雜、列車編組長、機車車輛軸重大、貨車車輛狀態離散度大、列車操縱難度大,重載列車運行過程中的縱向沖動問題尤為突出。加之機車車輛與線路基礎設施相互作用劇烈,導致機車車輛設備與線路結構部件的使用壽命下降、疲勞傷損等問題凸顯,降低了重載列車的運行品質和機車車輛的使用壽命,嚴重影響了運行的安全性、平穩性和不間斷性,給行車安全帶來極大隱患。重載列車滿載運行過程中,特殊工況下輪軌力可達300 kN,輪軌力過大可能導致軌面產生壓潰現象,因此,對重載列車輪軌力進行長期監測具有重要意義。
重載列車輪軌力受列車速度、線路狀況、荷載偏載等因素影響,其動力作用呈現不同特點,主要評價指標為輪軌垂向力、輪軸橫向力、脫軌系數、輪重減載率等參數。目前,輪軌力計算主要分為測力輪對和間接式測輪軌力兩種方法[1-2]。
測力輪對技術是在輪對上加裝應變片,構建所需要的橋路,把輪對設置為力傳感器,標定力-應變之間的關系,從而得到實時輪軌力。該技術通過測力輪對能直接且精準地得到輪軌力。近年來,測力輪對技術在快速客運車輛和重載貨車領域逐漸受到國際關注。美國聯邦鐵路管理局旗下的交通技術中心(Transportation Technology Center, Inc.,TTCI)、ENSCO公司,以及美國通用汽車公司旗下的EMD公司等機構,與加拿大鐵道技術協會(National Research Council of Canada,NRCC)合作開展了輪軌力監測系統的開發工作,建立了輪對標定試驗臺,能夠連續實時監測輪軌力的變化情況[3]。德國聯邦鐵路局(Deutsche Bundesbahn)開發的測力輪對利用輪軸上安裝的應變計來實現輪軌力測量。英國國家鐵路公司(British Rail)對輻條式測力輪對進行了研究。瑞典某公司推出了IW14測力輪對系統,并通過德國聯邦鐵路局的產品認證(EBA)[4]。國內研究人員對該技術的主要研究方向是對輪軌力實現實時連續監測,開發了測力輪對系統,這些系統在高速鐵路的聯調聯試中得到了應用。如張立民等[5]提出的監測技術,既能實現輪軌力的在線監測,也能通過高級信號處理的方式實現輪軌接觸狀態的監測。但同時,測力輪對技術存在制作復雜、對橋路設計要求高、標定試驗要求嚴格、信號傳輸及數據處理復雜等問題。此外,通過對輪對進行較大改造來應用測力輪對技術會帶來高昂的成本,并且由于測力輪對安裝時無法采用制動,故長期連續在線路上進行測量仍然存在一定難度[6]。
間接式測輪軌力方法有安裝周期短、成本低的優勢。相較于測力輪對技術,該方法只需安裝少量傳感器即可進行系統搭建,且能夠低成本、長周期地計算輪軌力等指標,具備可替換性強、便于檢修等性質,具有較高的工程實際應用價值。因此,本文主要采用間接式測輪軌力方法搭建重載列車輪軌力監測系統。
針對重載列車于關鍵區段運行過程中,因操縱方式、線路條件等差異導致的復雜輪軌相互作用關系,充分考慮包括輪軌間垂向高低頻沖擊作用、輪軌橫向動力作用、線路結構受力、軌道動態變形以及軌道結構振動等因素,基于車下安裝的傳感單元測量得到的軸箱加速度、構架橫向加速度、一系簧應變、一系簧位移等參數,計算并建立包括輪軌垂向力、輪軸橫向力、脫軌系數、輪重減載率等指標在內的重載列車輪軌安全性綜合評價指標,為重載鐵路輪軌安全監測提供成套監測技術,實現2萬噸重載機車輪軌力等關鍵指標的實時監測。
1 動態輪軌力監測方案設計
1.1 間接式測輪軌力監測點設計
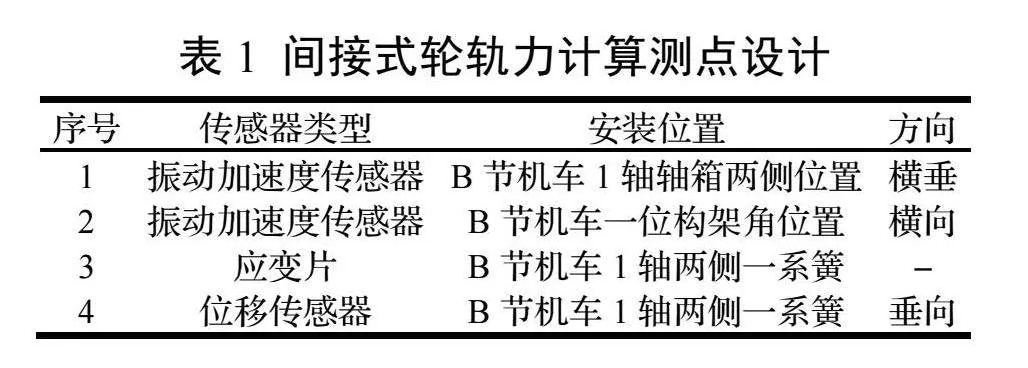
間接式測輪軌力計算過程為:在軸箱及一系彈簧上安裝加速度傳感器、位移傳感器與電阻式應變片,測量獲取軸箱振動加速度、一系減振器相對位移和一系簧作用力,并進一步計算得到輪軌力等相關指標,測點設計如表1所示,系統安裝如圖1所示。安裝機車以某八軸機車為例。可實現的監測項包括:輪軌垂向力、輪軌橫向力、輪軸橫向力、脫軌系數與輪重減載率等[7-8]。
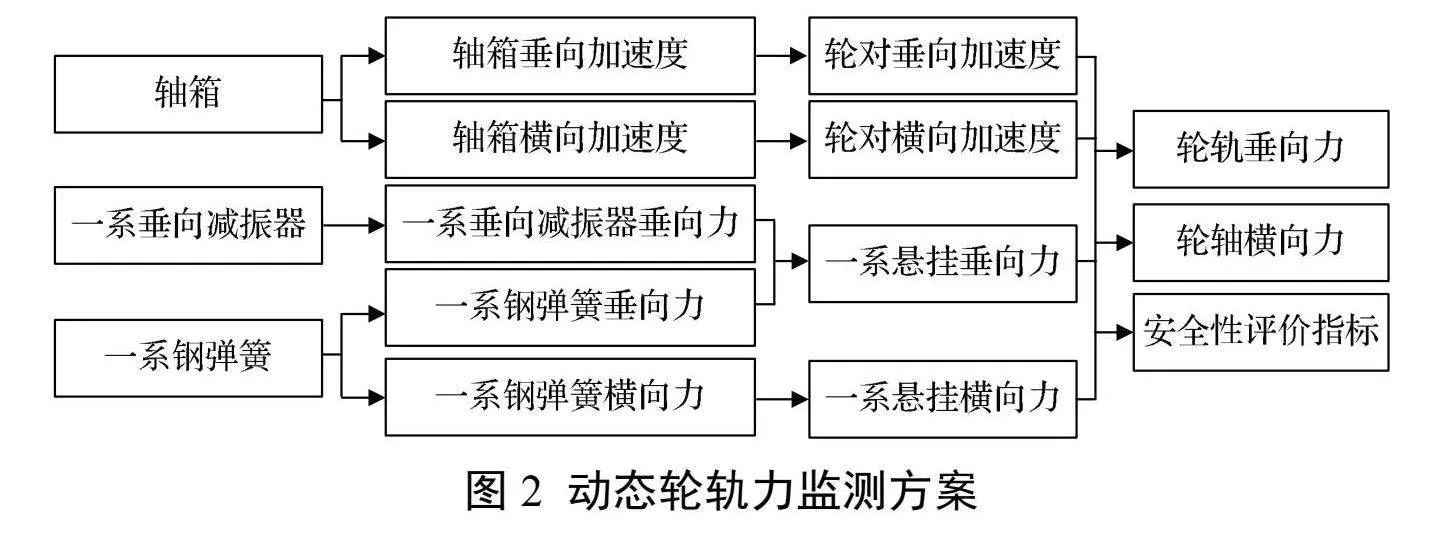
機車輪軌動態作用力檢測方案如圖2所示。首先在輪對兩側軸箱上安裝加速度傳感器,測試軸箱垂向振動加速度和橫向振動加速度;在一系垂向減振器上安裝激光位移傳感器,測試一系垂向減振器上下連接點的相對位移;在一系鋼彈簧上粘貼應變片,測試一系鋼彈簧垂向應變和橫向應變。然后通過兩側軸箱振動加速度計算輪對振動加速度;通過一系垂向減振器上下連接點垂向相對位移計算一系垂向減振器垂向力;通過一系鋼彈簧應變計算一系鋼彈簧懸掛力。最后,得到一系懸掛垂向力和一系懸掛橫向力。通過式(1)~(3)求解得到輪對左右兩側輪軌垂向力、輪軸橫向力。
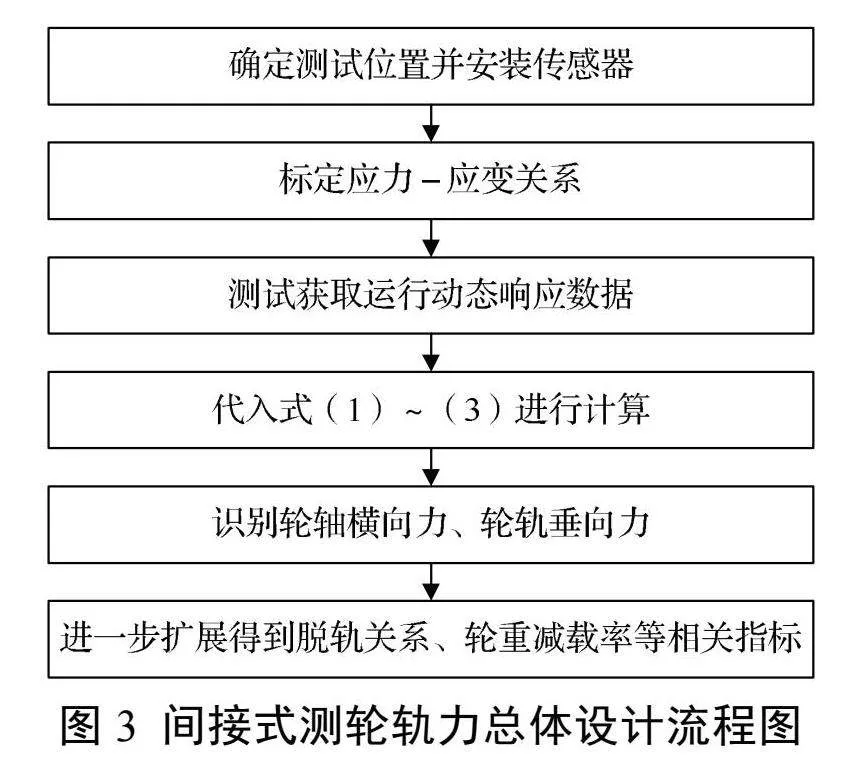
系統總體設計流程如圖3所示。
az、ay為軸箱的垂向和橫向振動加速度;mw為輪對質量;G為輪對重力;Qs1、Qs2為一系懸掛垂向力;Fr1、Fr2 為一系鋼彈簧橫向力;Fs1、Fs2為一系懸掛橫向力;Qd1、Qd2為一系減振器垂向力;Q1、Q2為輪軌垂向力;Y1、Y2為輪軌橫向力。
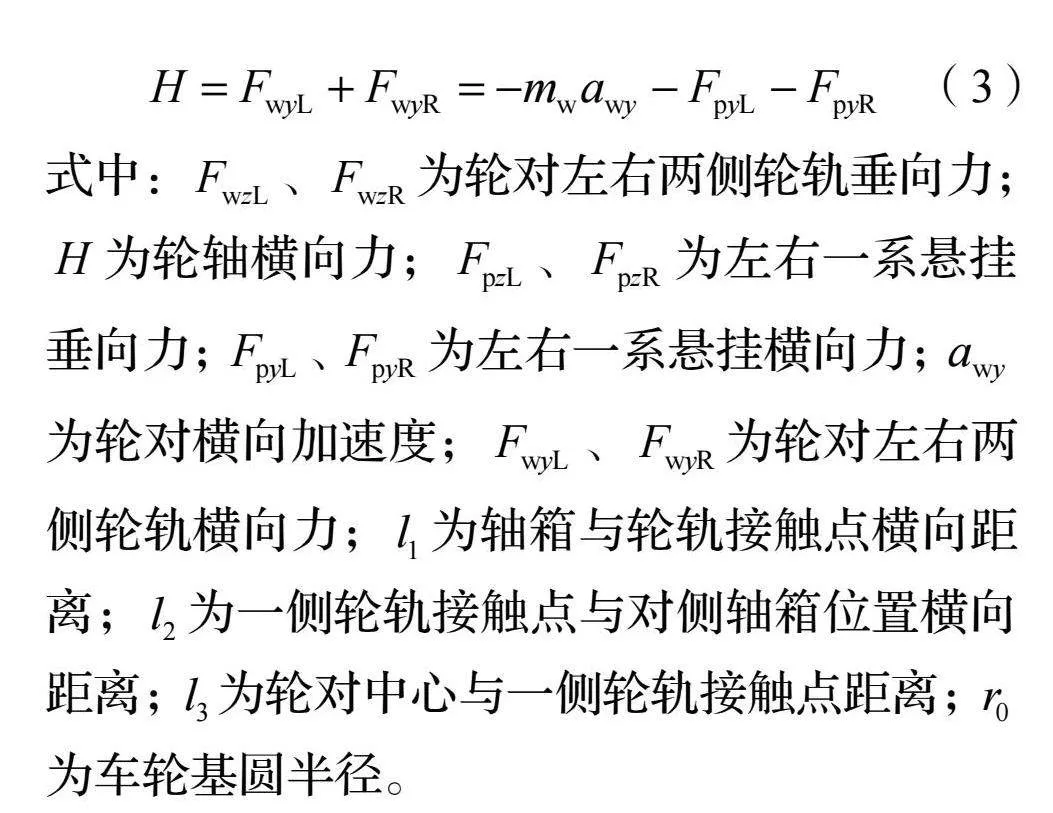
式中: 、 為輪對左右兩側輪軌垂向力; 為輪軸橫向力; 、 為左右一系懸掛垂向力; 、 為左右一系懸掛橫向力; 為輪對橫向加速度; 、 為輪對左右兩側輪軌橫向力; 為軸箱與輪軌接觸點橫向距離; 為一側輪軌接觸點與對側軸箱位置橫向距離; 為輪對中心與一側輪軌接觸點距離; 為車輪基圓半徑。
1.2 前端數據處理單元設計
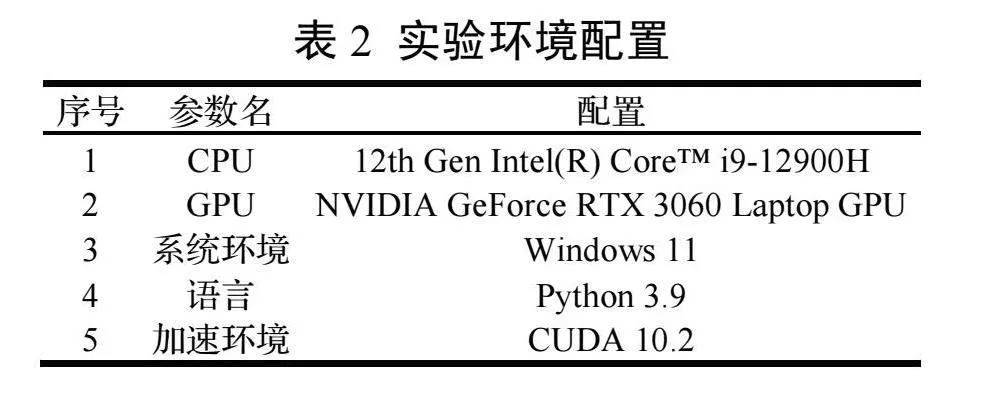
重載列車車載輪軌力監測系統前端主要由測試傳感器與數據處理模塊組成。其中,數據處理模塊環境配置如表2所示,可以脫機運行,安裝于機車電器柜內,如圖4所示。
1.3 監測數據通訊方案
選擇基于Lora和Zigbee雙網絡的無線通信網絡,使用其免費頻段,特點是傳輸數據快、距離短、無后期費用。本監測系統通訊方案如圖5所示,包括安裝于機車中的通訊控制器和安裝于貨車端部的信號發射器。
通訊控制器是基于Lora和Zigbee雙網絡的無線通信網絡系統,通過Lora和Zigbee兩種無線通信方式各組建一套Mesh架構的無線網絡結構[9]。在該構架中通過中繼節點的方式,將數據信號由機車通訊控制器傳送到各車輛單元。在通信協議上包含數據包的校驗與生命碼,同時以雙網絡的形式各自接收通訊命令,對比命令后,下傳到車輛監測裝置,保證數據命令傳遞的準確性與實時性。
2 前端傳感單元安裝方法
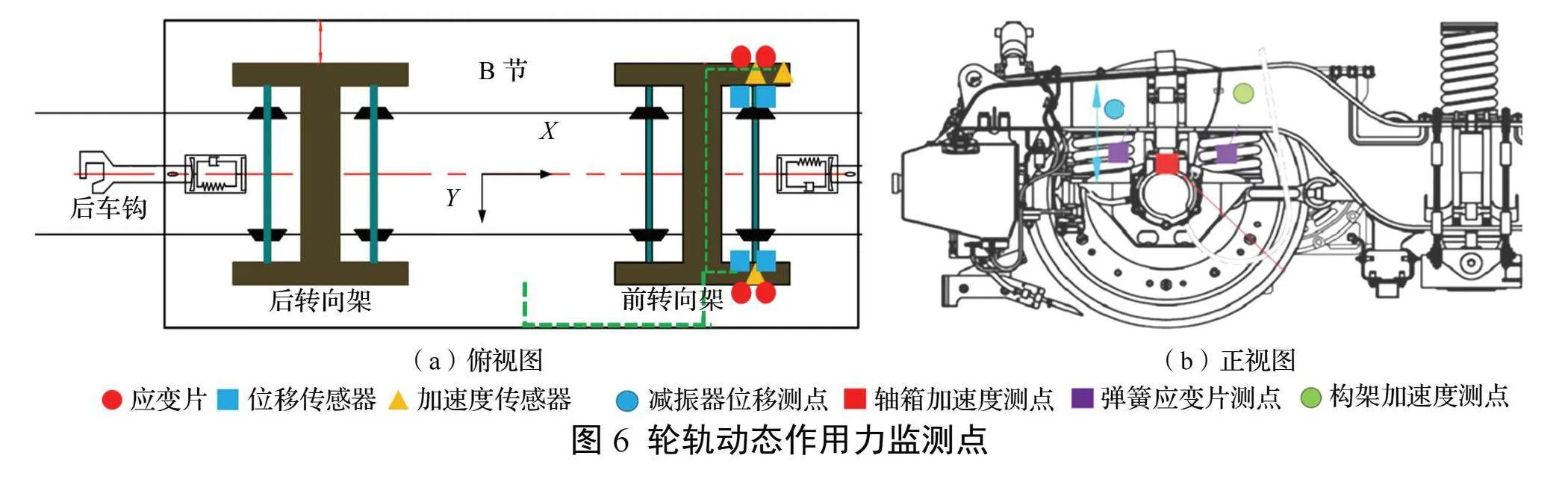
根據上述重載機車間接式輪軌力計算方法,可以確定需要安裝的傳感單元主要包括激光式位移傳感器、加速度傳感器與電阻式應變片,輪軌間接式作用力檢測前端傳感單元安裝方案如圖6所示。
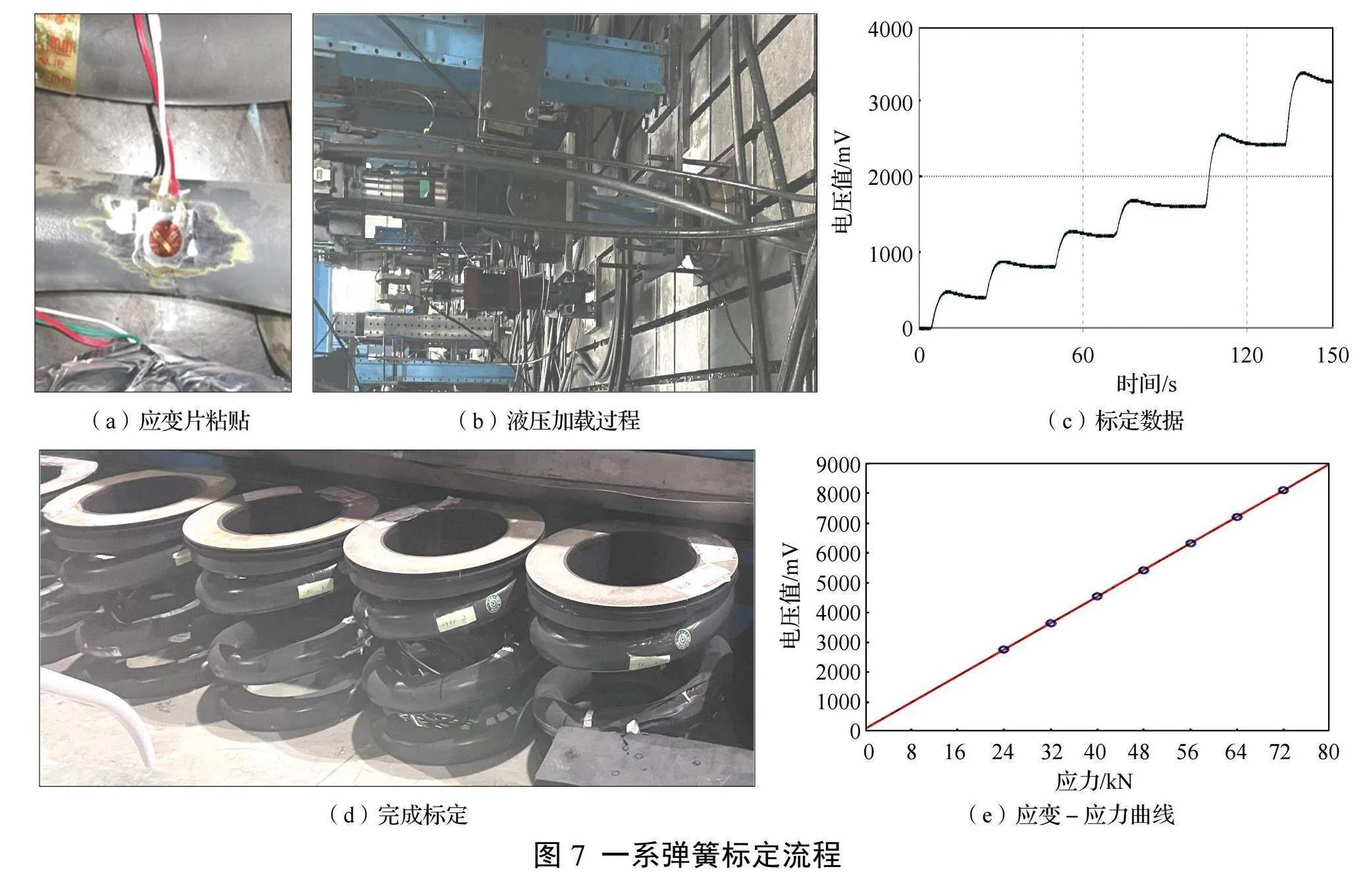
2.1 應變片安裝及標定方法
電阻式應變片用于測量一系彈簧的應變,根據標定曲線求解一系力。如圖7所示,應變片粘貼于重載機車1軸左右兩側的2個一系彈簧上,共計4個測點,通過液壓機對彈簧施加壓力,最終得到應變-應力曲線,即在試驗中通過彈簧應變得到實際的彈簧力[10]。
2.2 加速度傳感器安裝方式
如圖8所示,在重載機車1軸軸箱與一位構架上安裝加速度傳感器測量軸箱振動加速度與構架振動加速度等指標,其中軸箱加速度測量橫垂兩個方向,構架加速度測量橫向一個方向,構架加速度傳感器需安裝在構架側架軸箱中線上部。
2.3 位移傳感器安裝方式
位移傳感器用于測量一系彈簧垂向位移,安裝在重載機車1軸左右兩側的兩個一系簧內部的平臺上,共計4個測點。安裝方式為在彈簧底座內部安裝卡盤,將位移傳感器使用螺栓固定于卡盤中心處。
3 結果及驗證
將本文開發的間接式測量輪軌力監測系統搭載于2萬噸重載列車的中部機車上進行準確性驗證。采用上述前端傳感單元安裝方法并標定后,通過數據采集與處理系統的預設置模塊,對傳感器的安裝位置、采樣頻率、通道個數等參數進行設置,并設置相關監測通道啟動采集閾值及報警閾值。列車行進時,監測系統采集數據,完成一系彈簧輪軌力、一系彈簧垂向、橫向位移等參數的計算,并基于式(1)~(3)計算輪軌垂向力、輪軸橫向力等安全性指標。當所得指標超過設置的安全閾值時,發出報警信號提醒司機。
數據集成界面如圖9所示[11]。
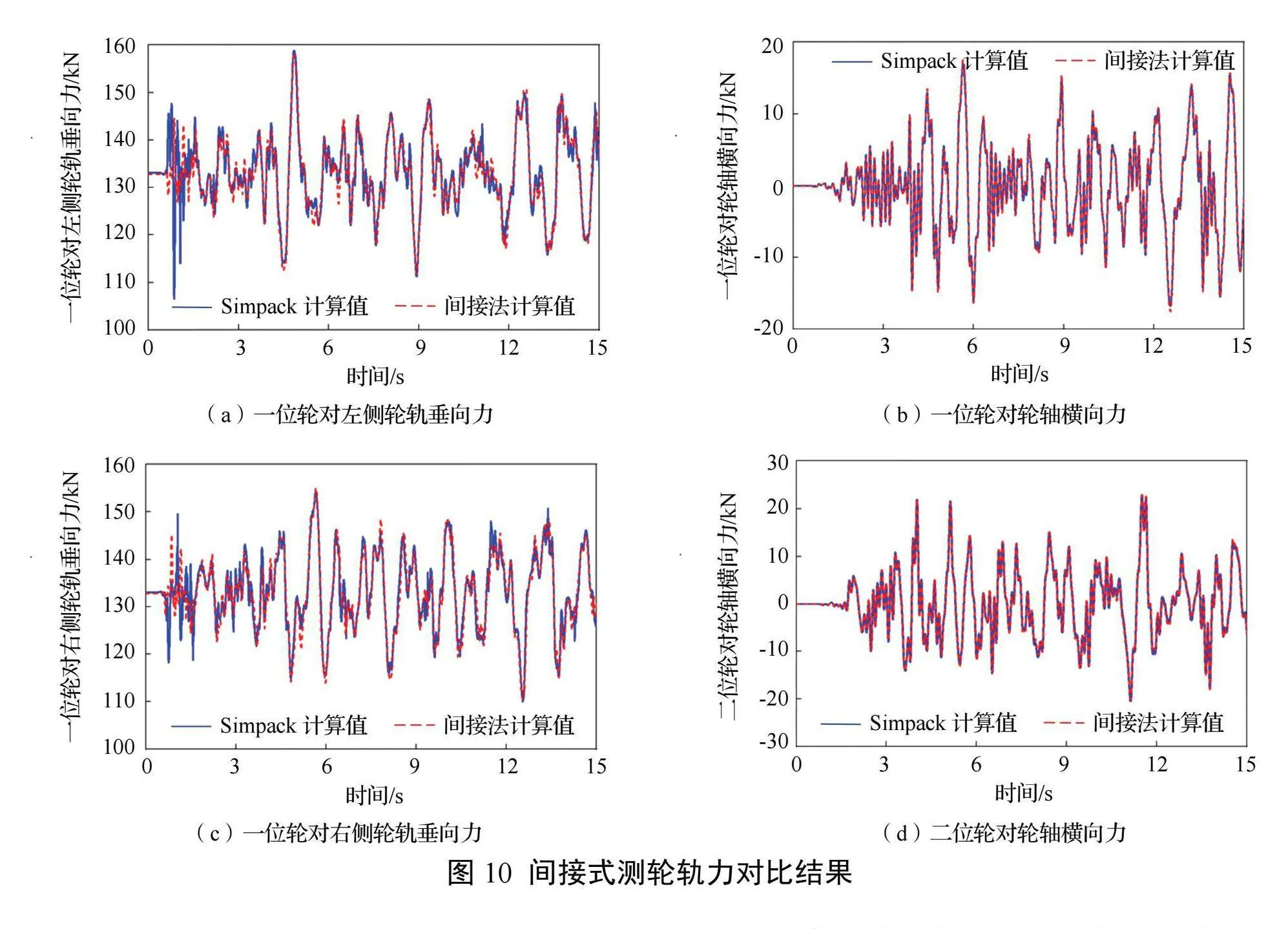
基于重載列車-軌道耦合動力學理論[12-13],建立2萬噸重載列車動力學模型,對上述間接式測量輪軌力監測方法進行可行性驗證。對2萬噸重載中部機車在平直線路上的動力學性能進行仿真,并計算輪軌垂向力等安全性指標,軌道不平順采用5級譜,分別對比一臺重載列車中部機車一位輪對的左右側垂向力與一二軸的輪軸橫向力,結果如圖10所示。可以看出,
計算結果與仿真結果吻合較好,證明基于間接式測輪軌力的監測方法可以較準確地實時計算輪軌垂向力、輪軸橫向力等機車安全性參數。
基于上述所采集的數據,加裝用于測量車體三向加速度的前端傳感器,并結合上述所采集的信號計算重載機車的橫向平穩性指標與垂向平穩性指標[14-15],結果如圖11所示。可以看出,該監測系統具有良好的可擴展性。
4 結束語
針對測力輪對測量輪軌力方法高成本與長周期性的缺點,本文基于間接式測量輪軌力方法開發了重載列車中部機車輪軌力動態監測系統。該系統主要由前端傳感設備、數據采集與處理系統、集成顯示系統組成。在重載列車的中部機車上加裝加速度傳感器、位移傳感器、電阻式應變片等前端傳感單元,通過信號傳輸線纜傳入數據采集裝置,測量間接式計算輪軌力所需的參數。通過安裝的數據處理裝置能夠實現重載列車中部機車的輪軌垂向力、輪軸橫向力、脫軌系數與輪重減載率等參數的實時計算、監測與傳輸等功能,并可通過網絡發送給地面端,支持遠距離監控功能。通過建立重載列車-軌道三維耦合動力學模型,對間接式測輪軌力方法進行驗證。結果表明,該監測方法能夠較準確地計算輪軌垂向力、輪軸橫向力等安全性指標。在重載機車上安裝離線計算單元可以實現脫機操作。通過新型輪軌力計算方法研究形成了重載列車安全性能實測數據-理論模型算法-實際應用的全過程解決方案,并推動了綜合監測與分析技術在重載列車運維過程中的全面應用,同時積累的大量輪軌作用數據可為基礎設施新型部件設計提供依據。
參考文獻:
[1]張勝龍,王文斌,沈凱明,等. 中國城市軌道交通輪軌力檢測技術研究綜述[J]. 科技和產業,2023,23(4):247-253.
[2]豆傳勃. 輪軌力檢測在城市軌道交通中的應用[J]. 交通世界,2020(22):29-32.
[3]FISEHE G,GRUBISIC V. Fractures on wheelset axles and their causes[J]. ZEV rail GlasersAnnalen,2006(130):98-106.
[4]UHL T,MENDROK,K. lnverse Identification Problems: Theory and Practical Applications[M]. Krakow:ITE Press,2005.
[5]張立民,金學松. 基于測力輪對的輪軌瞬態作用力仿真計算[J]. 鐵道學報,1998(4):146-151.
[6]張巖. 高速鐵路輪軌力地面連續監測系統研究[D]. 北京:中國鐵道科學研究院,2009.
[7]崔澤安. 低地板車輛動力學性能及輪軌力間接測量研究[D]. 成都:西南交通大學,2018.
[8]周亞波. 基于鐵道車輛振動加速度的輪軌力反演方法研究[D]. 成都:西南交通大學,2020.
[9]劉維來,趙璐,楊圣,等. 一種混合型貨運列車車內通訊網絡的設計[J]. 微計算機信息,2011,27(10):6-8.
[10]吳謨彪. 彈簧扭桿負載模擬性能評價系統設計及標定方法研究[D]. 太原:中北大學,2021.
[11]畢朝暉. 2萬t重載列車制動系統狀態監測系統研究[J]. 今日制造與升級,2022(11):84-86.
[12]翟婉明. 車輛-軌道垂向系統的統一模型及其耦合動力學原理[J]. 鐵道學報,1992(3):10-21.
[13]翟婉明. 車輛-軌道耦合動力學[M]. 4版. 北京:科學出版社,2015.
[14]倪純雙,王悅明. 淺析平穩性指標和舒適度指標[J]. 鐵道機車車輛,2003(6):1-3.
[15]劉建新,王開云,封全保,等. 橫向減振器對機車平穩性能的影響[J]. 交通運輸工程學報,2006(3):1-4.