一種全自動石榴剝皮取肉裝置的設計
2024-11-02 00:00:00馮浩洋孫亮波袁沖鄧鴿
機械 2024年10期




摘要:為解決傳統人工石榴剝皮取肉效率低、取肉過程果肉易損傷等問題,對石榴果剝皮取肉方法進行研究,并基于SolidWorks軟件設計了一種全自動石榴剝皮取肉裝置。該裝置通過對石榴果人工去皮方法進行功能元求解,設計有限流出料、擺正換位、切頭劃皮、撐開敲打以及分離收集五套工序步驟。為提高石榴果取肉加工效率,采用串并聯式流水線設計將上述五套串聯工序復制四組并聯,對串聯工位進行機械結構設計并驗證其合理性。該裝置將批量石榴分配給四組加工流水線同時加工,每個石榴需經過頭部切除、表皮劃瓣、撐開脫籽三道工序進行剝皮取肉處理,最后對石榴果皮果肉進行分離收集,完成石榴剝皮取肉的整個加工流程。該裝置的設計為市場提供了一種大批量石榴快速剝皮取肉的可行方案。
關鍵詞:石榴剝皮取肉;全自動裝置;變胞機構;分離收集結構;SolidWorks
中圖分類號:TP23 文獻標志碼:A doi:10.3969/j.issn.1006-0316.2024.10.008
文章編號:1006-0316 (2024) 10-0059-07
Design of an Automatic Device for Pomegranate Peeling and Fleshing
FENG Haoyang,SUN Liangbo,YUAN Chong,DENG Ge
( School of Mechanical Engineering, Wuhan Polytechnic University, Wuhan 430048, China )
Abstract:In order to solve the problems of low efficiency and potential damage of the flesh during traditional manual pomegranate peeling and flesh extraction, the method of peeling and extraction is investigated, and an automatic device based on SolidWorks 3D modeling software is designed. By solving the function element of the method of manual pomegranate peeling, the device is designed with five sets of process steps: limited outflow, positioning and switching, cutting and peeling, stretching and beating, and separating and collecting. In order to improve the efficiency of pomegranate flesh extraction, a serial-parallel conveyor line design is adopted to replicate the five sets of serial processes into four parallel groups, and the mechanical structure of the serial stations is designed and the feasibility is verified. The device distributes batches of pomegranates to four groups of processing lines simultaneously. The peeling and flesh extraction of each pomegranate includes three steps: head cutting, skin splitting and seed removal. Finally, the skin and flesh of the pomegranate are separated and collected to complete the whole process of peeling and fleshing. The design of the device provides a feasible solution for the quick peeling and fleshing of large quantities of pomegranates in the market.
Key words:pomegranate peeling and meat extraction;automatic device;metamorphic mechanism;separate collection structure;SolidWorks
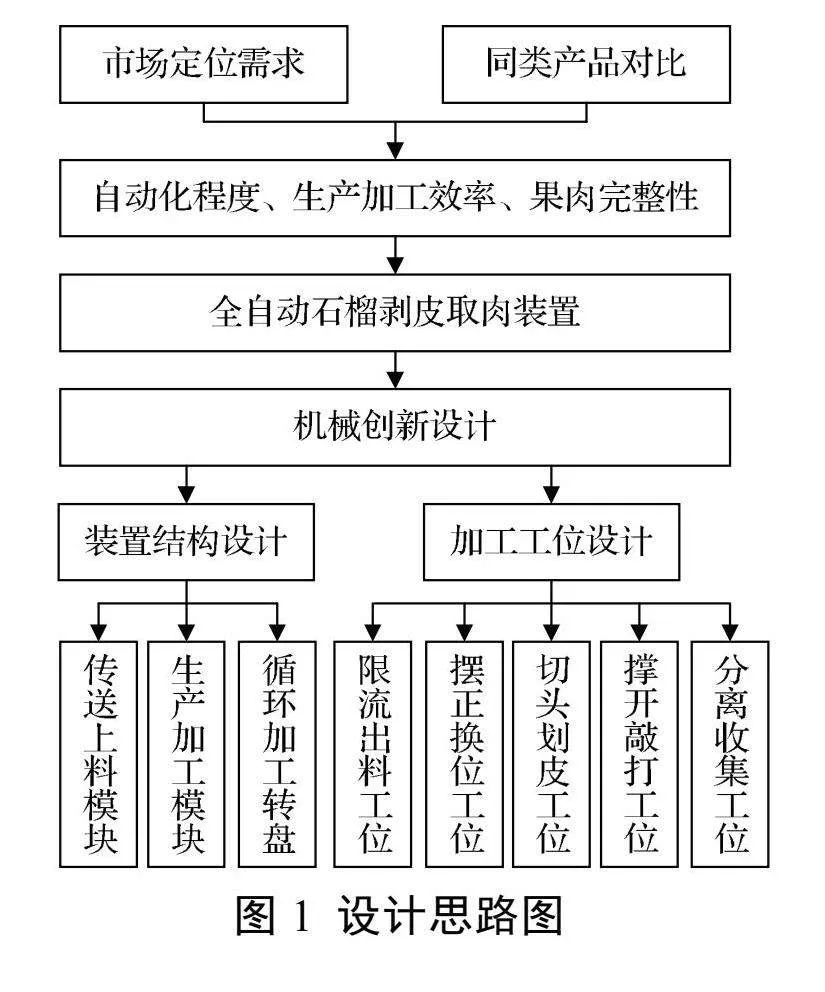
石榴作為一種口感風味極佳的水果,不僅果肉含有豐富的營養物質[1],果皮也具有較高的藥用價值[2]。但石榴的剝皮取肉過程較為繁瑣,人工脫粒效率低、成本高。目前市面上的幾種石榴剝皮取肉設備相比于傳統手工剝皮效率有所提升,脫粒效果顯著,但存在難適應大批量加工、自動化程度不高、功能單一、取肉過程對果肉有損傷等問題。現有石榴剝皮取肉設備及性能分析如表1、圖1所示。
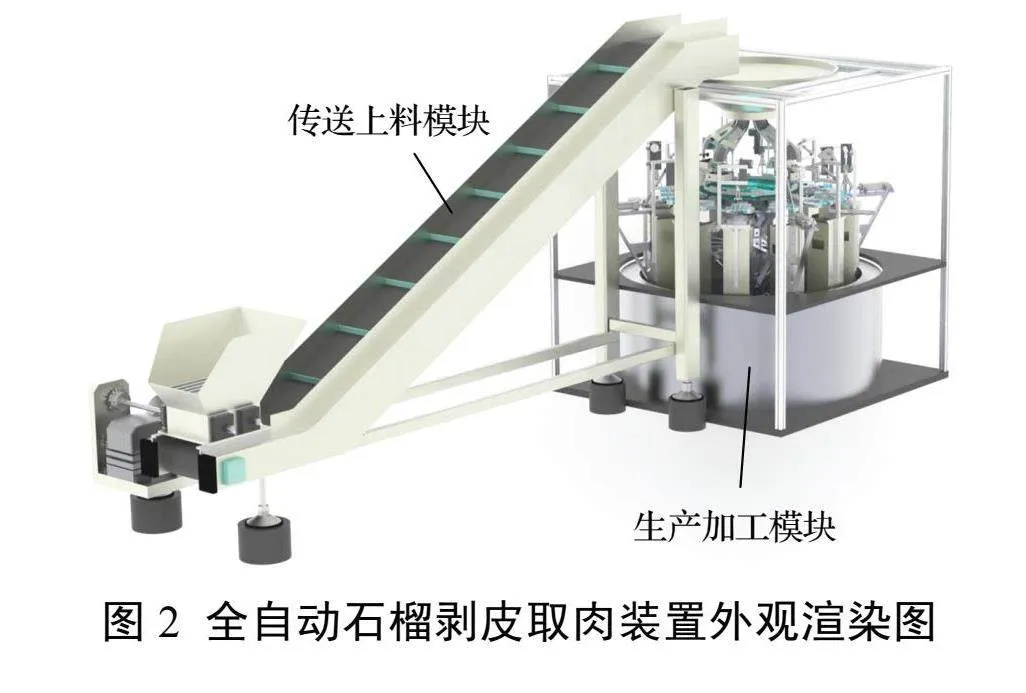
因此,本文設計了一種全自動石榴剝皮取肉裝置,可對大批量石榴進行剝皮脫粒取肉,并對石榴果肉和石榴果皮進行分離收集。使用時只需將石榴批量倒入送料箱中,經過一系列自動化加工便可得到純凈的石榴果肉和果皮。
1 設計思路
該全自動石榴剝皮取肉裝置在人工石榴剝皮取肉方法的基礎上,通過研究石榴的形態結構,對石榴剝皮取肉的每一步處理進行動作原理分解,得出每個完整的石榴剝皮脫粒需要經過切頭、劃皮(開瓣)、掰開敲打三大步驟。針對這些步驟進行對應工位結構設計,并通過機械結構實現工位功能效果[6]。該裝置以PLC控制器為核心和控制單元,形成一整套完整控制流程的控制功能機制[7],對每個工位的設備進行精準控制,使每個工位有序高效進行。整體設計思路如圖1所示,完整裝置如圖2所示。
2 結構設計及功能實現
2.1 加工工位結構
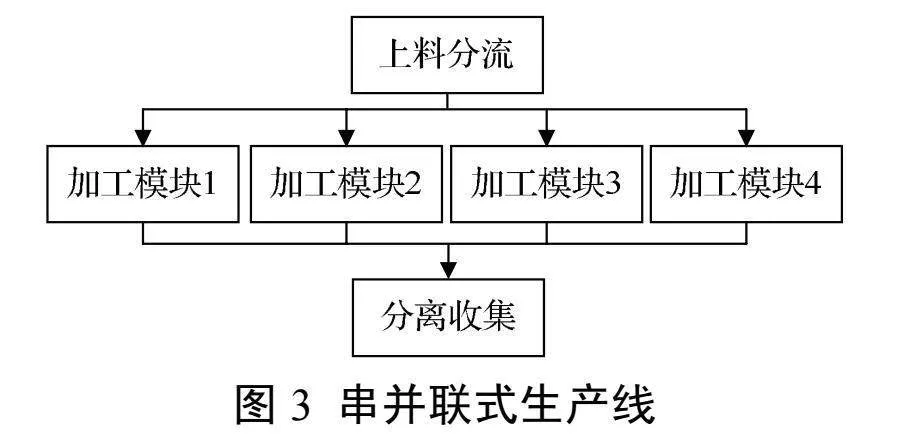
在對石榴剝皮取肉過程進行動作原理分解的基礎上,為提高石榴加工的自動化水平和生產效率,本研究采用串并聯式生產線設計[8],如圖3所示。
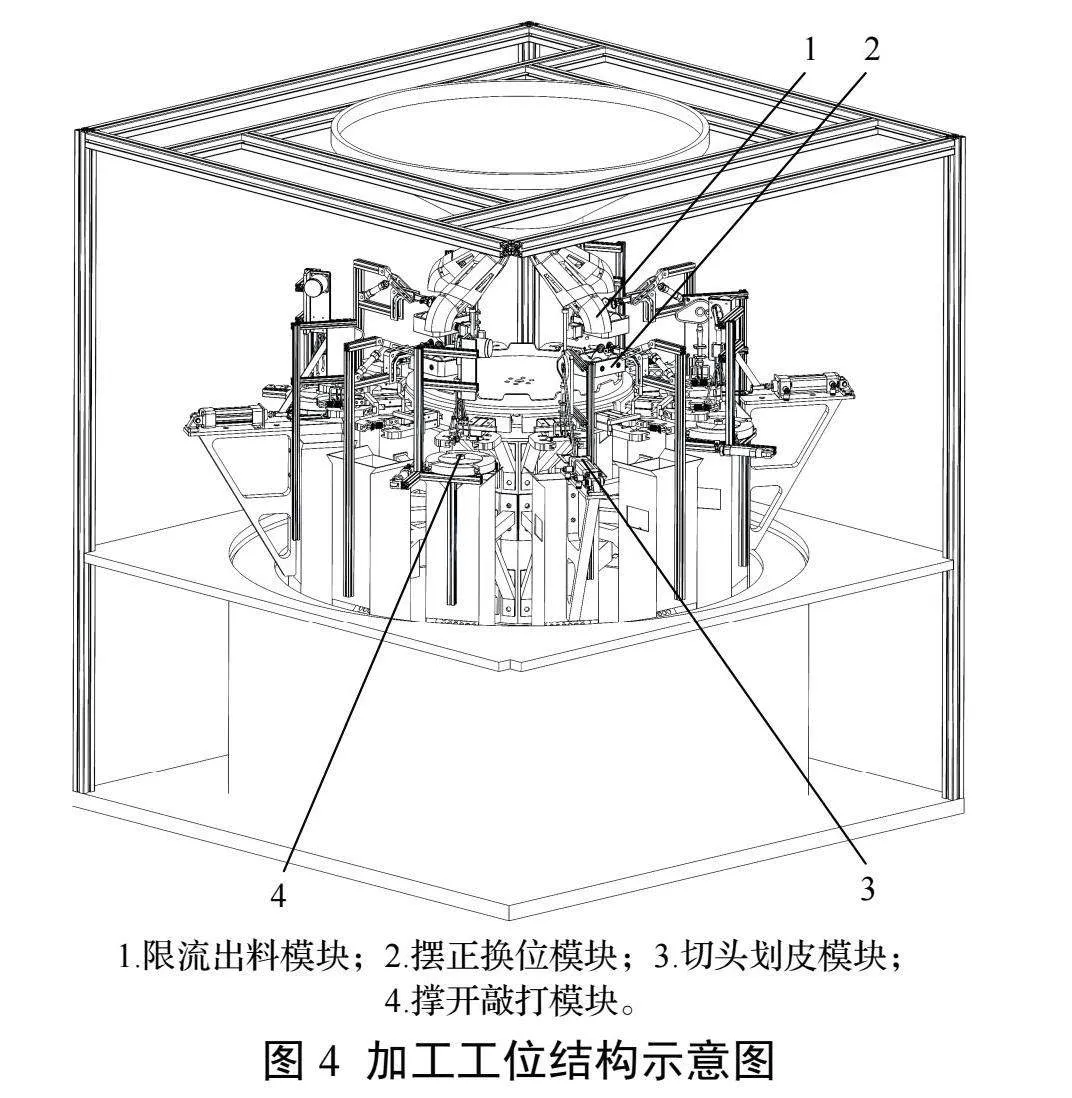
加工工位結構示意圖如圖4所示。加工區域的主體被構建為一個環形加工工位,其周圍并聯四組功能相同的加工模塊。進行剝皮取肉工作時,每個石榴都必須依次經過限流出料、擺正換位、切頭劃皮、撐開敲打這四個工序流程。每組加工模塊均包含上述四個工位,以確保每個石榴都能得到一致和高效的處理。
參考FMS(Flexible Manufacturing System,柔性制造系統)[9]和CIMS(Computer Integrated Manufacturing Systems,計算機集成制造系統)中常見的工作站概念,為實現工序的連續循環加工,本設計引入了轉盤工位,不僅可以保證每個工位有序運作,而且可以最大化地提高整個系統的生產效率和靈活性[10]。
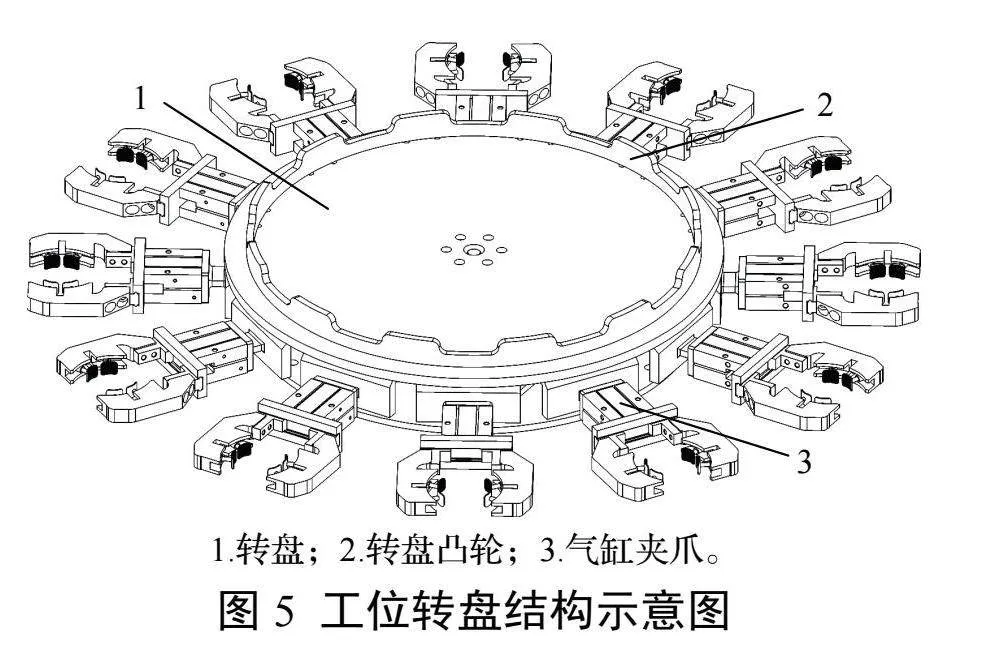
在設計本裝置的工位轉移機制時,采用一種內部棘輪工位轉盤機構,如圖5所示,旨在實現高效且精確的間歇性工位轉移[11]。該機構的設計基于機械間歇運動理論,通過轉盤的分度運動來確保每個工位之間的同步轉移和石榴的連續加工。
當各工位正在加工時,轉盤通過制動系統保持靜止狀態;完成加工后,轉盤由制動狀態切換至啟動狀態,主體轉動30°對每個工位進行一次工位轉移。轉盤的外側安裝有12組氣缸夾爪,分別對應十二個加工工位,對石榴進行加持固定。為確保加持過程中石榴不脫落,進行如下計算:
Fg=mg (1)
Fe=1.5Fg (2)
Ft=Fg+Fe (3)
式中:Fg為石榴所受重力;m為一個標準石榴的質量;Fe為機器運轉過程中的額外夾持力;Ft為夾爪總夾持力。
取:m=0.5 kg,g=9.8 m/s2。
計算得:Ft≈14.7 N。
即每組夾爪的總夾持力至少為14.7 N。
2.2 限流出料機構
為確保石榴從上料箱到加工區域的自動化高效、有序輸送,通過舉升傳送帶將批量石榴運送至分流漏斗,使石榴被分配至四組模塊。為實現石榴的有序分配,在分流漏斗內設置四組限流通道,確保同一時間每個工位只處理一個石榴。
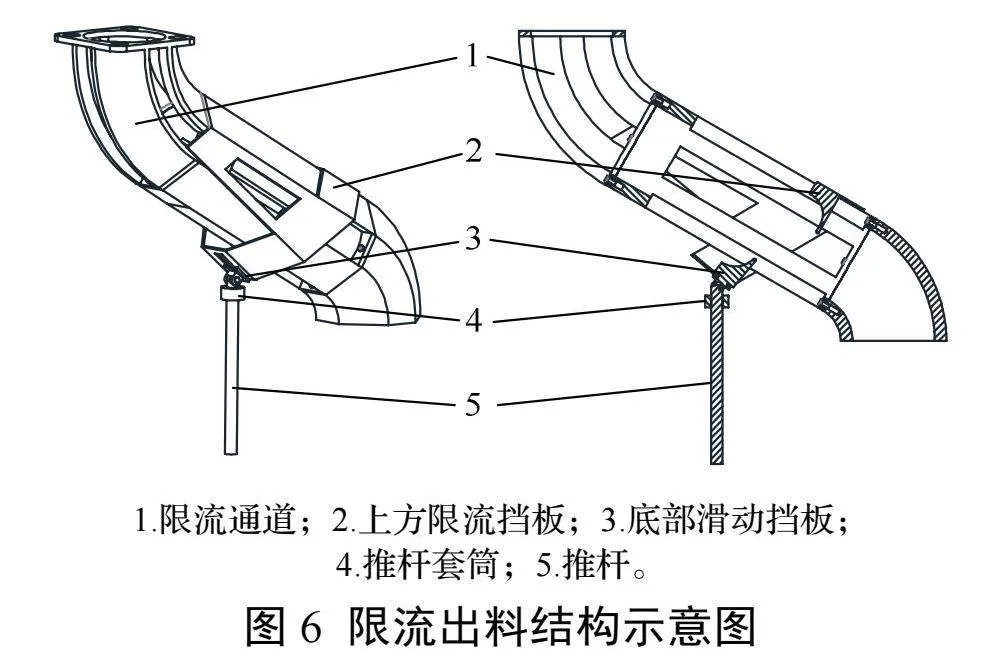
限流出料結構由限流通道、上方限流擋板及底部滑動擋板組成,如圖6所示。進入限流通道內部的石榴沿管壁有序排列,初始狀態為上方限流擋板放下,通道內所有石榴均被阻隔。出料時,下方推桿頂起,推動底部滑動擋板上升,繼續阻礙上方石榴通過,同時在滑槽的輔助下頂起上方限流擋板,供下方石榴通過。
成熟石榴的直徑約為8~13 cm,因此,上方限流擋板和底部滑動擋板的間距尺寸活動范圍設計為14~16 cm,僅略大于單個石榴的最大直徑,從而確保每次出料時只限一個石榴進入下方工位,實現有序出料。為進一步驗證該限流出料結構的設計合理性,計算:
F=3n-(2Pl+Ph) (4)
式中:F為機構自由度;n為活動構件數;Pl為低副約束數;Ph為高副約束數。
該機構設計中,已知n=4,Pl=5,Ph=1。
計算得:F=1
原動件數目為1,該機構具有確定的運動,符合設計要求。
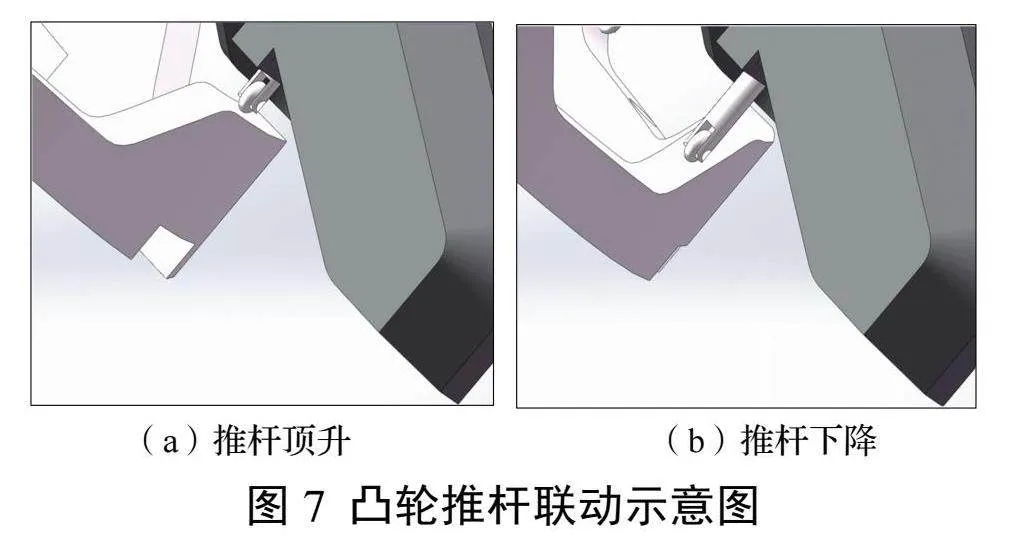
如圖7所示,加工過程中,推桿與工位轉盤邊緣的凸輪結構采用聯動設計,將周期性的線性推動力傳遞給推桿,從而實現對石榴限流出料的原動力提供。凸輪結構的旋轉與工位轉盤的運動相互耦合,確保在轉盤進行工位轉移的同時,推桿按照預定的時序頂起,推動限流擋板,完成石榴的有序出料,從而實現對石榴流動的精確控制,避免石榴的堆積和損傷。
2.3 擺正換位機構
為滿足后續工序的自動化加工要求,石榴需統一姿態,實現頂端萼管向下標準化擺放,為此設計了一套擺正換位機構。
如圖8所示,擺正機構包括擺正臺和擺正托盤。石榴從出料口落下后,首先進入擺正臺區域。在此階段,電機啟動并驅動兩個凹形滾輪旋轉,引導石榴進行有序滾動,利用石榴的球形幾何特性,將石榴的萼管姿態有效限制在兩種可能的滾動軸向上。
為使石榴姿態統一為萼管朝下,布置光感傳感器[12]于工位轉盤內側,檢測石榴萼管的朝向,再利用機器視覺系統[13]精確計算和識別石榴萼管的位置。當傳感器成功檢測到石榴萼管時,表明其已正確朝向工位轉盤內側,無需進一步調整。若傳感器未能檢測到萼管,則說明石榴朝向需調整,此時控制系統單元將接收到傳感器的信號[14],并激活位于擺正臺下方的氣缸。在螺旋限位槽套筒的輔助下,氣缸推動推桿完成180°的旋轉。此過程中,推桿上方的托盤頂起石榴并使其脫離滾輪,旋轉180°實現姿態調整,確保石榴的萼管朝向工位轉盤內側。
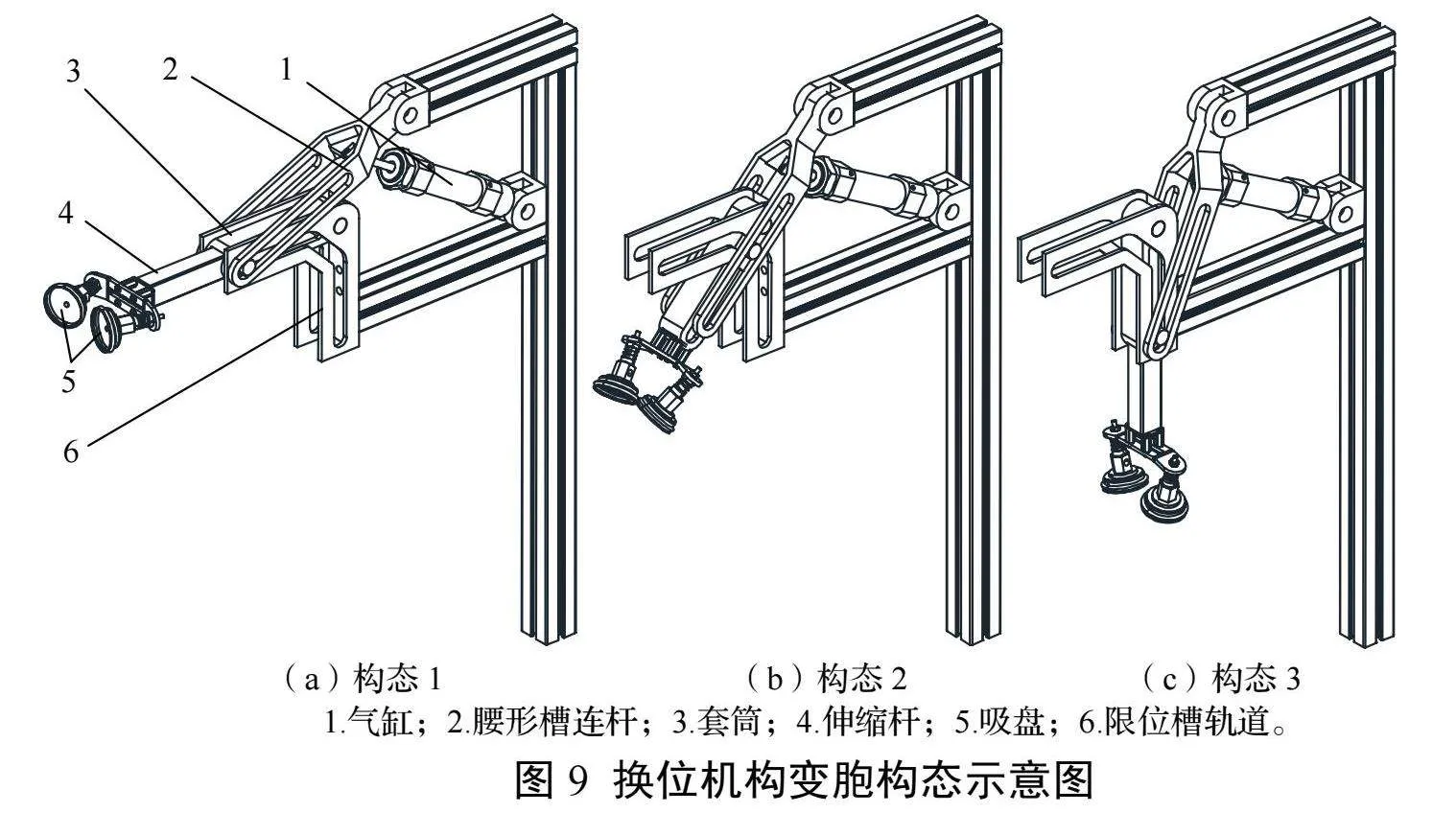
為將擺正后的石榴從擺正臺轉移至下方氣缸夾爪位置,設計了一種變胞機構[15],如圖9所示。該變胞機構包含氣缸、腰形槽連桿、可旋轉套筒、伸縮桿、吸盤以及限位槽軌道等關鍵組件,其工作過程分為三個構態,每個構態對應不同的動作效果[16]。
在構態1中,吸盤通過負壓裝置吸附石榴,氣缸驅動腰形槽連桿,帶動伸縮桿后移。此階段,機構的動力分析側重于確保吸盤穩定吸附石榴,并維持其姿態穩定,實現石榴的初始抓取并移出擺正臺,為下一過程留出運作空間。
在構態2中,伸縮桿后移至底部卡死并鎖定,此時旋轉套筒與伸縮桿結合為一體,并共同繞固定轉軸轉動。在這一過程中,完成對石榴90°的轉移動作。
在構態3中,機構整體轉動90°后鎖定轉動,伸縮桿在腰形槽連桿的作用下向下推出,石榴被轉移至加工轉盤。
2.4 切頭劃皮機構
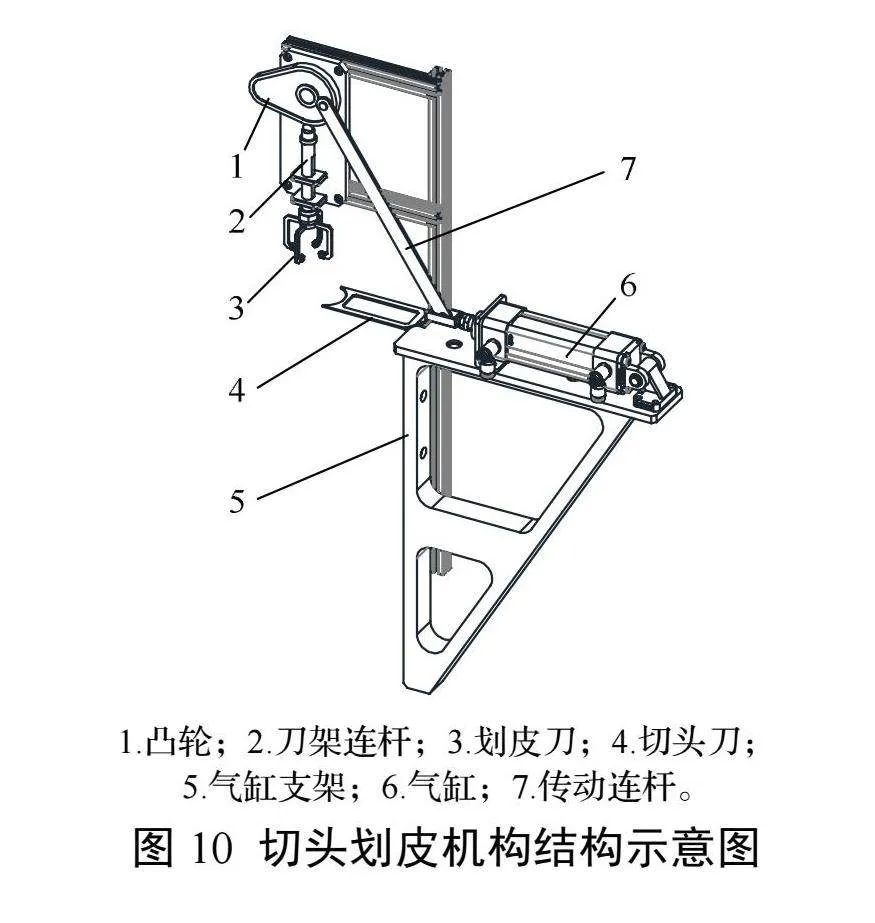
如圖10所示,切頭劃皮機構的主要組成部分包括氣缸、切頭刀、傳動連桿、凸輪、劃皮刀架連桿以及劃皮刀頭。氣缸的驅動作用帶動切頭刀對石榴頭部進行切除作業,傳動連桿與切頭刀之間的鉸鏈連接將動力傳遞給凸輪,推動凸輪逆時針轉動,進而帶動劃皮刀架向下推出。劃皮刀頭上設計有四個刀片,刀片之間留有一定間隙,確保在將石榴表皮均勻劃切為四瓣的同時,保留根部表皮的完整性。
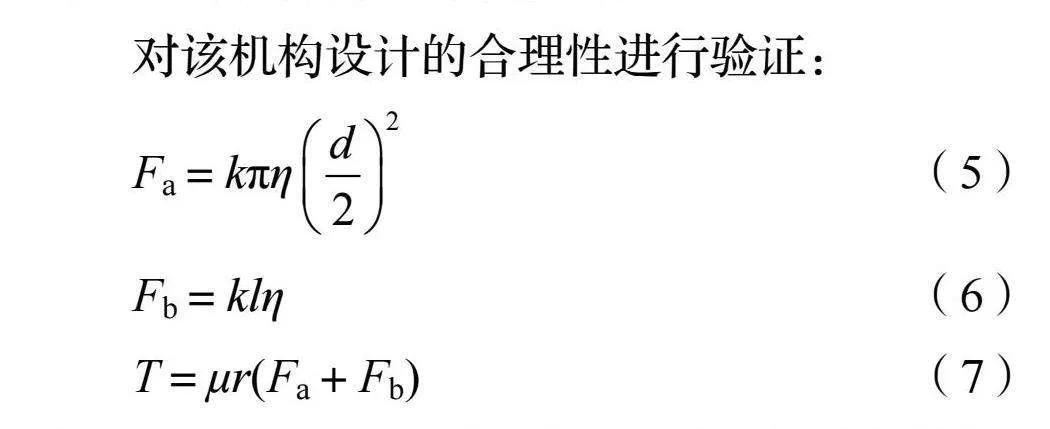
對該機構設計的合理性進行驗證:
Fa=kπη (5)
Fb=klη (6)
T=μr(Fa+Fb) (7)
式中:Fa為切頭刀所需力;k為石榴皮的抗切性系數;η為刀片的切割效率;d為頭部萼管的直徑;Fb為劃皮刀片所需力;l為刀片劃切總長度;T為傳動凸輪所需扭矩;μ為所需力矩系數;r為凸輪的半徑。
該設計中,k=5 N/mm2,η=0.9,d=5 cm,l=0.15 m,μ=0.1,r=0.05 m。
代入計算得到:Fa=9.82 N,Fb=6.75 N,T≈0.83 N·m。
將該結構設計的參數代入式(4),計算得其機構自由度為1。原動件數目為1,該機構具有確定的運動,符合設計要求。
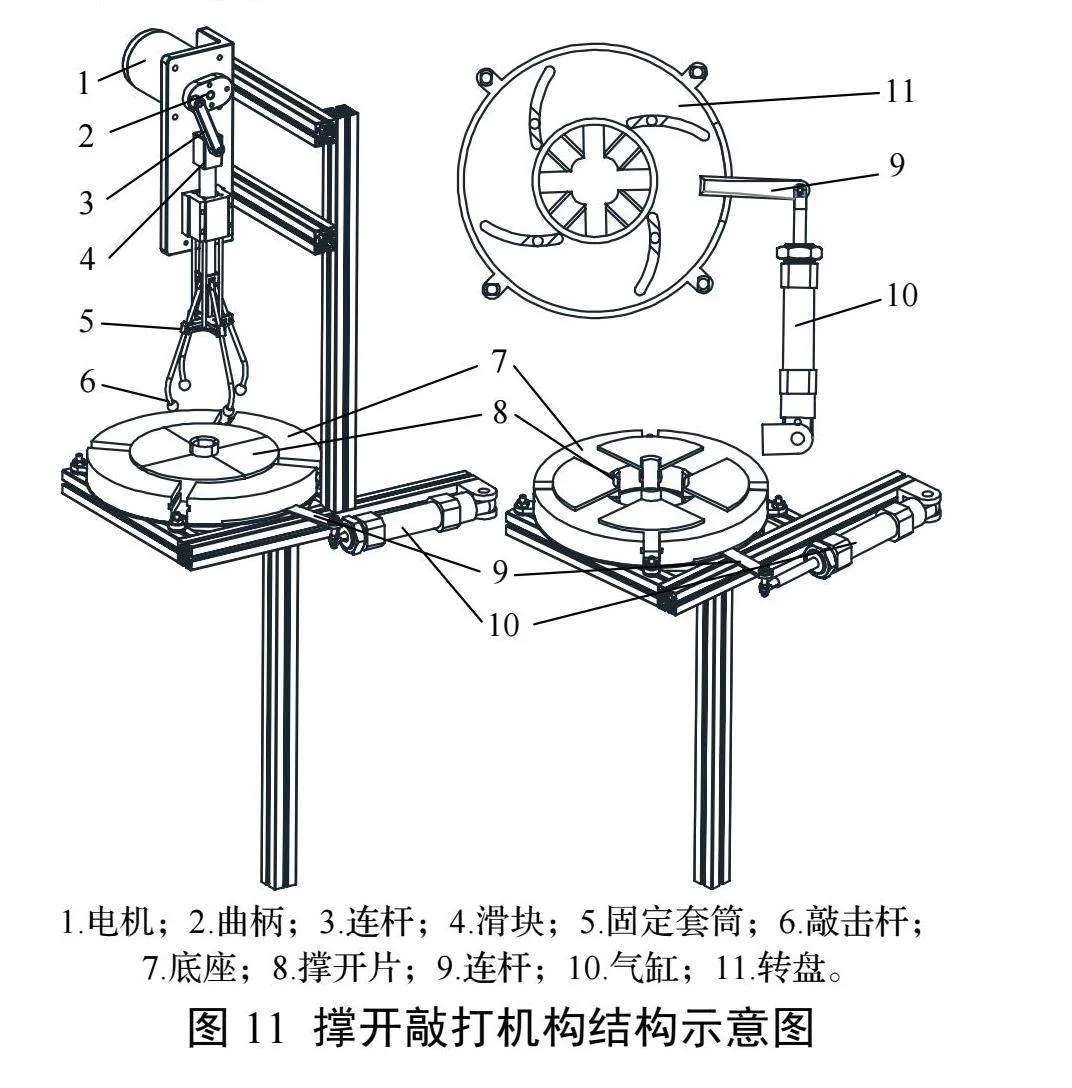
2.5 撐開敲打機構
如圖11所示,撐開敲打機構包括氣缸、轉盤、撐開片、敲擊桿及配重小球等關鍵組件。氣缸的推出作用通過連桿傳遞,驅動轉盤逆時針旋轉,撐開片在轉盤弧形限位槽的引導下向外側張開,同時底座上的直線型限位軌道槽使撐開片沿徑向張開,實現對石榴的均勻撐開。敲打結構由電機驅動曲柄旋轉[17],連桿帶動滑塊進行上下往復運動,敲擊桿隨之擺動,末端的配重小球在慣性作用下產生敲擊力。敲擊桿采用彈性材料,使得敲擊更為高效,實現對撐開石榴表皮的精準脫粒。
為驗證該機構設計的合理性,將設計參數代入式(4),得到其機構自由度為1。原動件數目為1,該機構具有確定的運動,符合設計要求。
2.6 分離收集裝置
如圖12所示,該裝置由分離通道和收集箱兩部分組成,其中分離通道內置分離隔板,隔板上設計有均勻排列的孔洞,孔洞尺寸精確控制為僅允許石榴果粒通過,確保果肉順利落入下方的果肉收集箱。在石榴果粒完全脫落后,固定石榴的氣缸夾爪松開,石榴皮因分離隔板的阻隔作用,沿隔板滑落至外側的果皮收集槽。為防止大量果粒在脫粒過程中同時涌入收集通道,導致部分果粒與果皮混合,收集槽底部設計有濾網,確保落入槽內的果粒能夠穿過濾網,最終匯聚于果肉收集箱。
該分離收集裝置的設計充分考慮了石榴果皮果肉生物結構的分離特性,密排孔隔板設計優化了果粒與果皮的分離效率,減少了果粒的損失和果皮的污染。此外,收集箱和收集槽的兩側均開有出口通道,便于快速獲取分離后的果肉和果皮。
3 結論
設計了一種全自動石榴剝皮取肉裝置,集石榴上料、限流出料、擺正換位、切頭劃皮、撐開敲打以及分離收集功能于一體。其特點包括:①利用工位轉盤結構聯動整體加工,出料口限流依次出料,保證整個工序流程高效有序進行;②擺正結構對加工石榴的姿態進行調整統一,變胞換位機構三構態變換實現石榴從擺正臺到氣缸夾爪位置的工位轉移;③實現了由一個氣缸推動同時完成切除石榴頭部萼管、劃開石榴表皮兩個動作;④撐開敲打機構實現對石榴的敲擊脫粒,石榴果肉與果皮在分離收集裝置中實現分離,可分別得到純凈的石榴果肉果皮。
該裝置可對大批量石榴實現剝皮取肉、分離收集。采用PLC控制器為核心對整個機器設備進行全自動化控制,從上料到加工生產再到最后分離收集的全過程均由對應機械結構實現,加工過程自動化程度高,人工成本低,有效提高生產加工效率,且對果肉損傷較小,為市場提供了一種石榴剝皮取籽的可行方案。
參考文獻:
[1]楊思佳. 石榴的營養功效與食用方法[J]. 新農村,2020(8):42.
[2]布日古德,娜布其. 簡述石榴的藥用及保健功效[J]. 中國民族醫藥雜志,2014,20(5):66-68.
[3]江門市新會區廣記果園農業有限公司.一種石榴取籽裝置:CN201811292993.9[P]. 2020-05-08.
[4]張雨婷.一種石榴剝皮脫粒機用篩選機構:CN202123254050.7[P]. 2022-09-13.
[5]安徽省成果石榴酒釀造有限公司.一種石榴去皮分離機:CN200810249695.1[P]. 2009-06-17.
[6]王敏. 自動化技術在農業機械設計制造領域的實踐[J]. 南方農機,2024,55(6):59-61.
[7]趙晶晶. PLC在農業機械智能化調度與路徑規劃中的應用研究[J]. 南方農機,2024,55(6):90-92.
[8]王海南,郭琎,楊國亮. 自動包裝設備一體化產線設計與研究[J]. 電子設計工程,2023,31(17):154-158.
[9]李煥,蔣婉瑩,肖宇亮. 基于FMS柔性制造生產線仿真技術[J]. 數字技術與應用,2022,40(9):54-56.
[10]王全喜,張俊國,包德勝,等. 牧草種子加工線設計與試驗[J]. 農業機械學報,2014,45(S1):113-118.
[11]蘆俊,周蕓,潘小華,等. 多工位轉盤系統間歇性高速運動的瞬態動力學分析[J]. 現代制造工程,2021(4):6-11.
[12]高橋清,王善慈. 傳感器技術的發展及研究動向[J]. 傳感器技術,1985(1):2-14.
[13]張雷. 農業生產中機器視覺技術應用現狀研究綜述[J]. 農業經濟,2023(1):36-37.
[14]劉細陽. 基于PLC控制的農產品加工機械性能檢測系統的研究與設計[D]. 長沙:湖南大學,2006.
[15]戴建生,丁希侖,鄒慧君. 變胞原理和變胞機構類型[J]. 機械工程學報,2005(6):7-12.
[16]楊鑫,孫亮波,熊鑫泉. 一種基于變胞機構的智能藥箱的創新設計[J]. 機械,2023,50(1):9-13,41.
[17]劉勁松. 曲柄滑塊機構教學裝置的設計與制作[J]. 機械,2019,46(4):34-36,47.
[18]陳年欽,陳傳輝,鄒奇,等. 石榴籽粒制備機的研發[J]. 南方農機,2020,51(16):28-29.