基于Arduino智能移動機器人制作
2024-10-31 00:00:00邢朝俊冉龍姣鐘斌龍秋節(jié)黃安杰
現(xiàn)代信息科技 2024年17期

摘 要:為響應(yīng)“新工科”的號召,促進創(chuàng)新創(chuàng)業(yè)人才的培養(yǎng),文章結(jié)合2023年四川省大學(xué)生工程訓(xùn)練綜合能力競賽山地協(xié)同物流接力賽道,賽教合一,校企協(xié)同育人。對一種基于Arduino平臺的智能移動全地形移動機器人進行研究。對機械結(jié)構(gòu)、硬件模塊和軟件模塊進行設(shè)計,使自主設(shè)計制作的全地形移動機器人實現(xiàn)自主循跡、窄橋爬坡、上樓梯、通過管道、信息交互扎破對應(yīng)顏色氣球的功能。通過該項目的訓(xùn)練,培養(yǎng)了大學(xué)生的工程創(chuàng)新意識,提升工程實踐能力。
關(guān)鍵詞:全地形移動機器人;結(jié)構(gòu)設(shè)計;Arduino
中圖分類號:TP242 文獻標(biāo)識碼:A 文章編號:2096-4706(2024)17-0165-04
0 引 言
“新工科”強調(diào)工程實踐能力、創(chuàng)新能力、具備國際競爭力的高素質(zhì)復(fù)合型“新工科”人才[1-2]。智能制造機械與電子技術(shù)實現(xiàn)向電機一體化融合[3]。為了培養(yǎng)大學(xué)生工程創(chuàng)新意識,提升工程實踐能力,促進創(chuàng)新創(chuàng)業(yè)人才培養(yǎng)。各創(chuàng)新比賽設(shè)置有智能越障小車、排爆機器人等賽道,賽教合一,把課堂內(nèi)容換成比賽方式,以實戰(zhàn)的形式,來鍛煉學(xué)生的創(chuàng)新意識、實踐能力和團隊合作精神。本文結(jié)合四川省大學(xué)生工程訓(xùn)練綜合能力競賽2023年山地協(xié)同物流接力賽道,通過機械設(shè)計與電子信息結(jié)合,進行編程設(shè)定環(huán)境,使其成為一種具有在不規(guī)則路面行走、攀越滑坡和階梯能力的智能移動機器人。
1 機械結(jié)構(gòu)設(shè)計
1.1 設(shè)計思路
該智能移動機器人模仿四驅(qū)車形狀設(shè)計,是一種小型化且便于拆裝的四輪二段式結(jié)構(gòu)。包括電動機安放的位置、輪子的選用、導(dǎo)向輪的設(shè)計,使其能夠完美的通過障礙物以及扎破對應(yīng)顏色氣球等任務(wù)。障礙物分別為模擬工業(yè)用柵格地毯、樓梯、管道、窄橋。最終設(shè)計出一臺擁有驅(qū)動電子能夠自行行走、特殊輪子以及識別顏色并扎破氣球的智能移動機器人。
1.2 設(shè)計方案及調(diào)試
1.2.1 機器人前進和越障設(shè)計
機器人要適應(yīng)多種地形且能輕松越過障礙,采用三種輪子方案:1)輪子由鋁輪片和塑料履帶組成;2)雙履帶輪結(jié)構(gòu)由鋁輪片和塑料履帶構(gòu)成[4];3)模型輪胎+海綿外層。實驗發(fā)現(xiàn)1)、3)結(jié)合能夠得到較好的速度、轉(zhuǎn)向性和穩(wěn)定性。為了通過樓梯和管道障礙物,設(shè)計前輪為大輪,輪子中心高于樓梯高度。前輪設(shè)計為大輪,小車在隧道入口處碰到邊緣時能夠順利進入,后小輪在轉(zhuǎn)向時不會碰到管道內(nèi)壁,提高了轉(zhuǎn)向性能,小車能夠精準(zhǔn)的在隧道內(nèi)拐彎行走[5]。為了解決通過窄橋輪子摩擦力較小,輪子原地打轉(zhuǎn)的問題。設(shè)計將后輪粘上厚膠布,膠布具有較好的韌性,當(dāng)小車有沖擊力時,膠布被階梯壓縮增大了與階梯表面的接觸面積,摩擦力增加,解決了不能上階梯的問題。
1.2.2 扎氣球裝置
用膠布將回形針固定在舵機的連接桿件上,在顏色識別傳感器識別到氣球顏色與需扎破氣球的顏色返回值一致時,機器人停止,舵機旋轉(zhuǎn)180°帶動回形針扎破氣球。該裝置整體輕盈,能最大限度的降低小車質(zhì)量,提升速度和穩(wěn)定性。
1.2.3 總體結(jié)構(gòu)設(shè)計
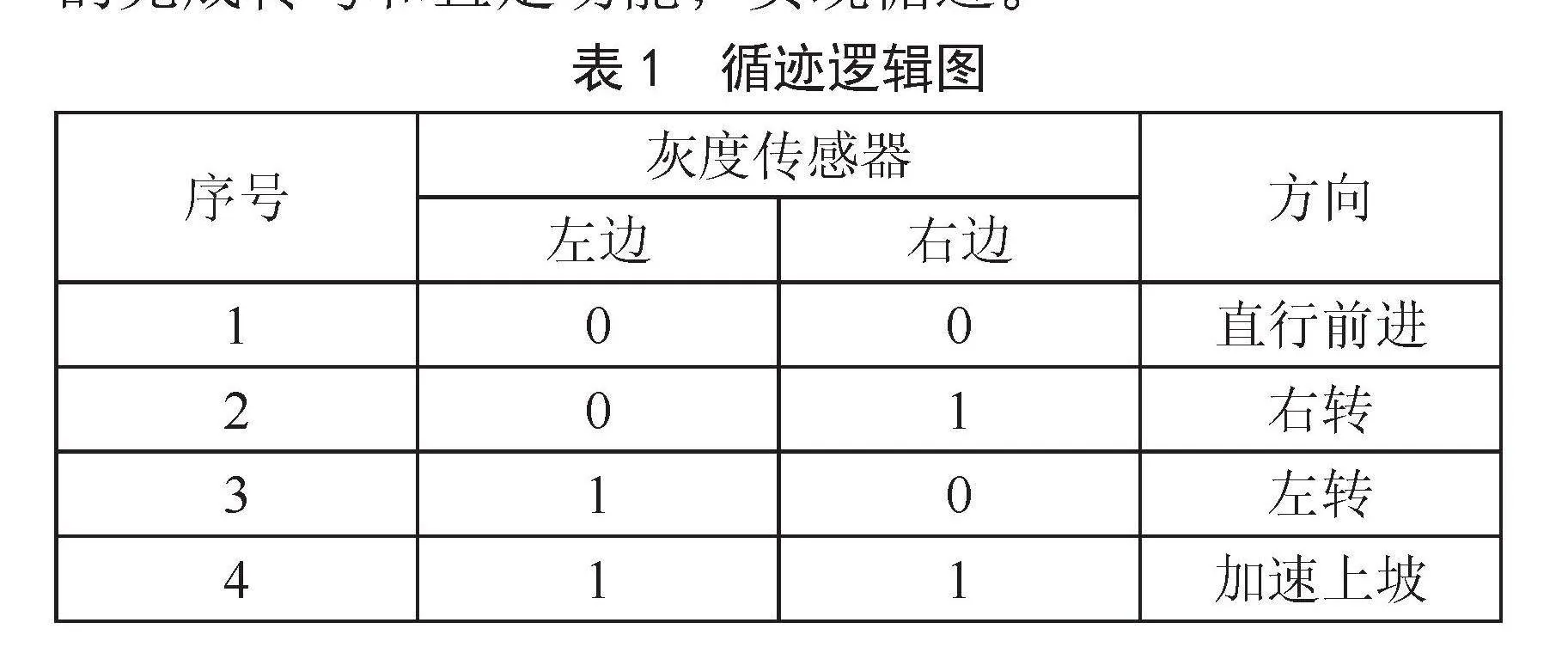
機器人選用簡潔的四輪驅(qū)動方式以達到結(jié)構(gòu)緊湊和減輕車體重量的目的。考慮到樓梯障礙,機器人使用大輪徑前輪和小輪徑后輪制造高度差以提高越障的性能。考慮到車體結(jié)構(gòu)縱傾中心靠后,為防止移動機器人上坡仰翻,將控制主板和電池安裝在車體中心靠前端,同時將舵機放在左側(cè)和后側(cè)。小車裝配如圖1所示,實物圖如圖2所示。
2 硬件模塊設(shè)計
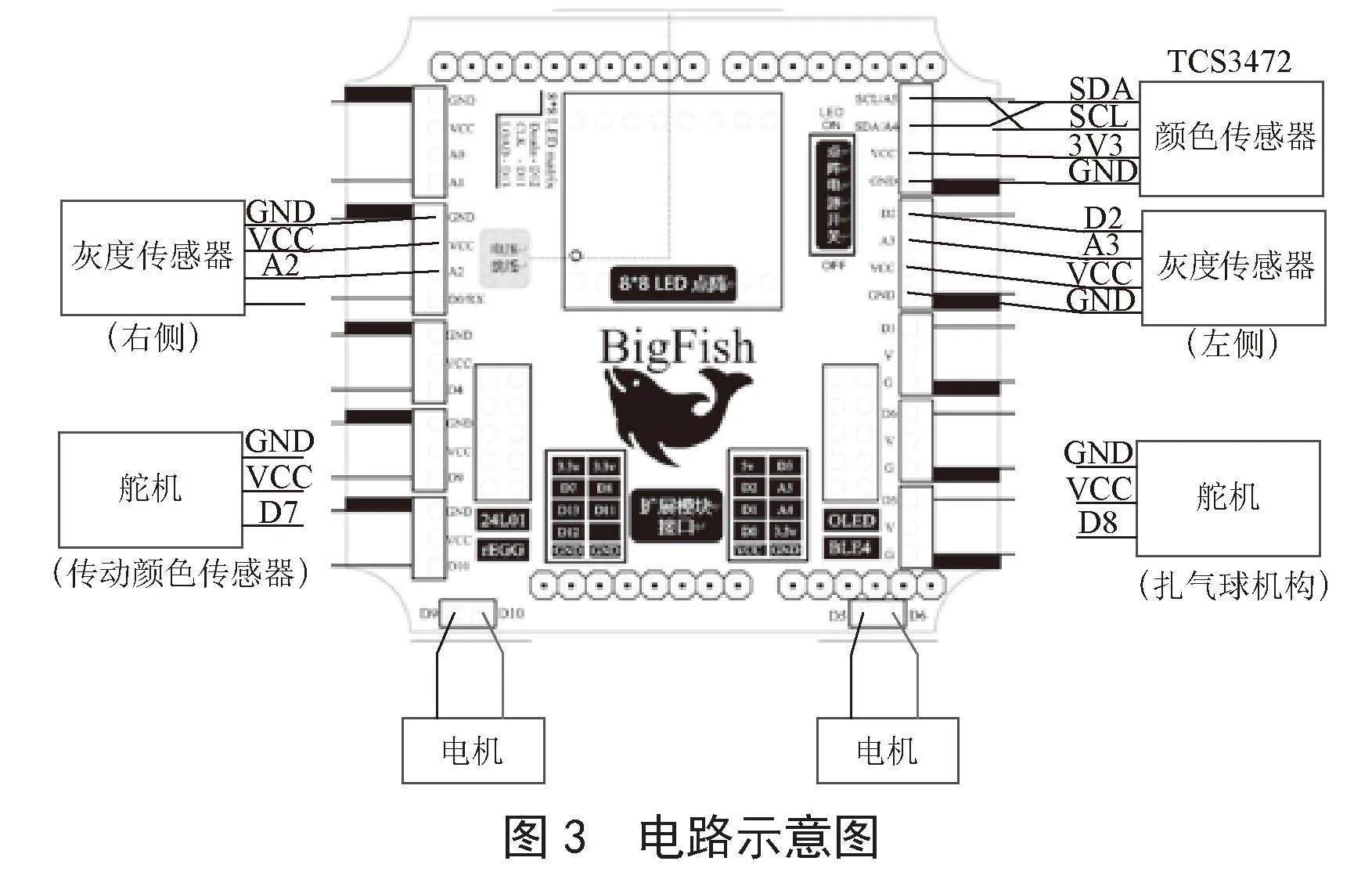
機器人選用控制器為Arduino UNO(主控板Barsa和擴展板BigFish)[6-9]。擴展板與主控板連接,擴展板D5腳、D6腳接控制左輪的直流電機;D9腳、D10腳接控制右輪的直流電機。A2、A3口連接2個灰度傳感器,A4、A5口接顏色傳感器;D8、D7接兩個舵機[10]。電路示意圖如圖3所示。
2.1 灰度控制器
灰度控制器能夠利用不同顏色的檢測面對光反應(yīng)不同其阻值也不同的原理來進行顏色深淺檢測,外觀如圖4所示。
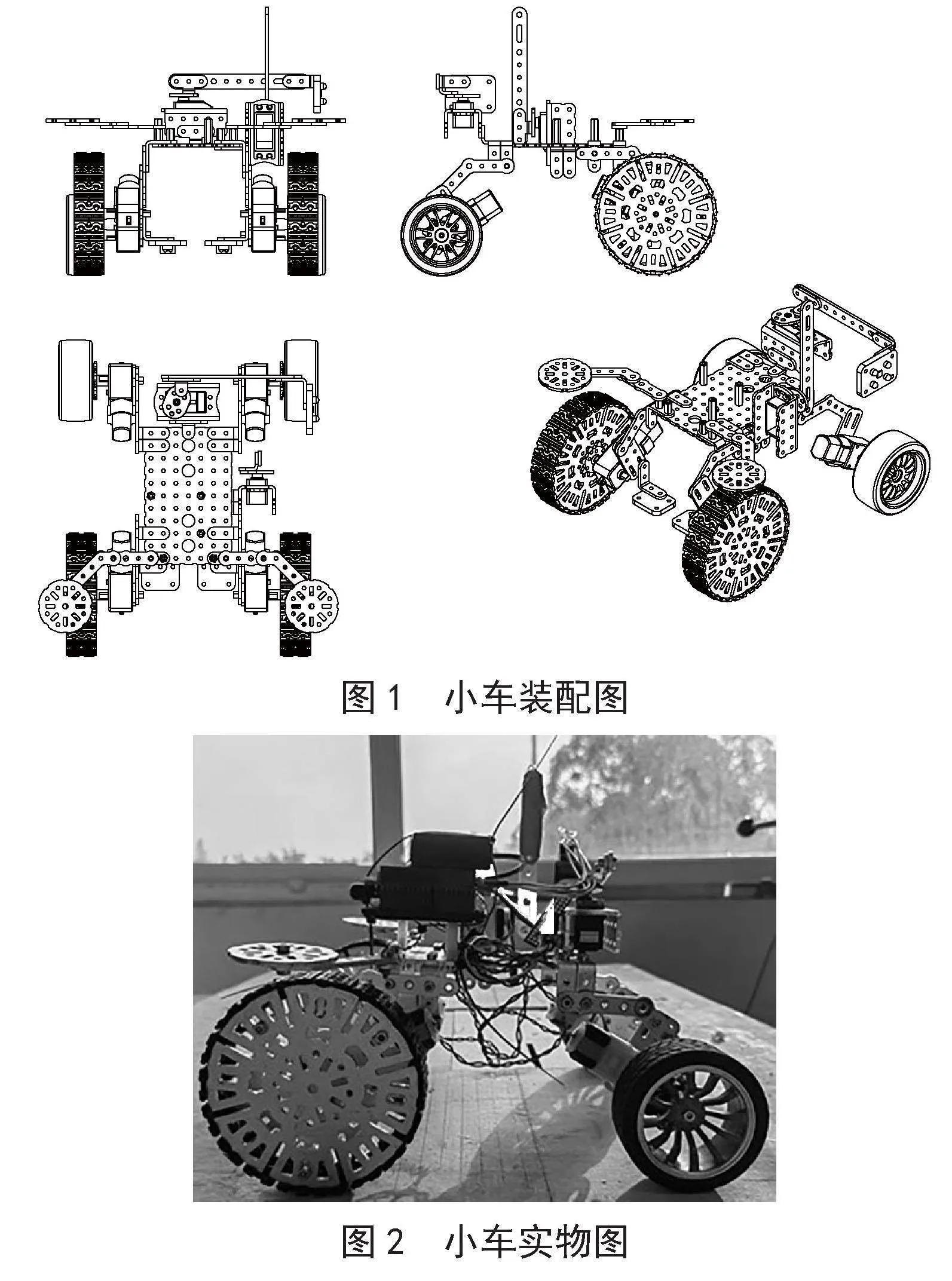
循跡部分:使用兩個灰度傳感器進行循跡。根據(jù)實際測量得到灰度傳感器返回的2個特征值,將這兩個值與設(shè)定閾值數(shù)組medium[2]比較。兩個灰度傳感器獲取的值是小于medium[0],medium[1]的時候,可以由此判斷左右兩邊都檢測到黑線,由此直行;兩個返回值中左邊灰度返回值大于medium[0],右邊小于medium[1]則實行向右轉(zhuǎn)的方案;兩個返回值中左邊灰度返回值小于medium[0],右邊大于medium[1]則實行向左轉(zhuǎn)的方案。如果都沒檢測到就直行。循跡邏輯圖如表1所示。經(jīng)過不斷地測試,兩個灰度傳感器配合電機的轉(zhuǎn)動實現(xiàn)小車不論在隧道內(nèi)外都能靈活的完成轉(zhuǎn)彎和直走功能,實現(xiàn)循跡。
2.2 顏色識別
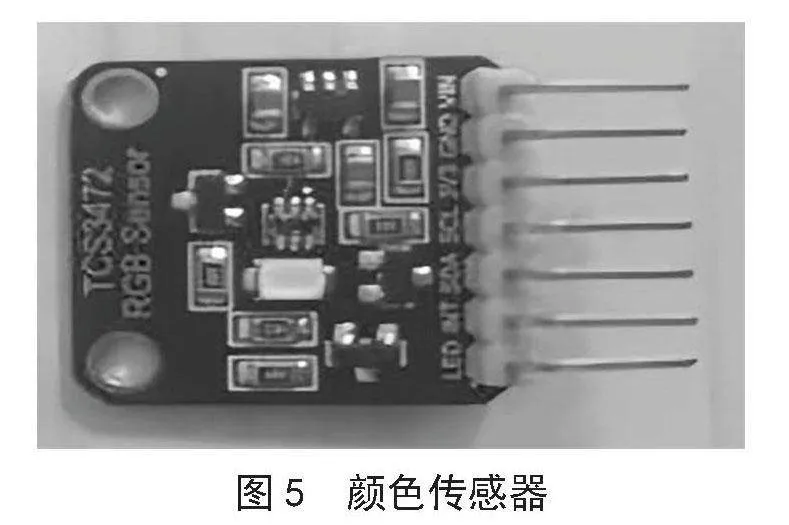
采用了TCS34725顏色傳感器,外觀如圖5所示。引入了Adafruit_TCS34725.h庫,其中Adafruit_TCS34725tcs=Adafruit_TCS34725(TCS34725_INTEGRATIONTIME_120MS,TCS34725_GAIN_1X);此函數(shù)表示傳感器積分時間,即傳感器用來測量顏色的時間間隔。積分時間設(shè)置為120 ms,即傳感器會在每次測量中花費120 ms收集數(shù)據(jù)。GAIN參數(shù)表傳感器的增益,即傳感器放大顏色信號程度。增益被設(shè)置為1倍,表示信號不會被額外放大。不同的增益級別適應(yīng)不同的照明條件和應(yīng)用場景。uint16_tr,g,b,c;首先聲明了一些變量,用于存儲傳感器讀取的數(shù)據(jù),包括紅色(r)、綠色(g)、藍色(b)分量,總顏色強度(c),然后運用TCS34725庫中的方法,賦值函數(shù)處理得到比例數(shù)。設(shè)定數(shù)組變量min_yanse_value1[3]和min_yanse_value2[3],把三個顏色臨界點的值得出存在數(shù)組面,此時可以用臨界點值與顏色傳感器得出的值來判斷顏色,并使用兩個變量賦值以此存取檢測到的顏色。使用定時器來控制兩次顏色識別順序,如果第一次識別到的信號燈顏色與氣球顏色一樣,實行扎氣球行為。扎破氣球后至標(biāo)志位,然后計時在終點范圍內(nèi)停止。
3 軟件模塊設(shè)計
3.1 顏色識別代碼
在計算機視覺和圖像處理領(lǐng)域,顏色識別是一項重要的任務(wù)。它涉及從圖像或視頻中提取、分類和識別顏色信息。通過顏色識別,可以對圖像進行分析、理解和解釋,以下是小車顏色識別代碼:
void yanse_shibie(int*value1,int*value2,int*frequency,int min_value1[3],int min_value2[3])//總顏色識別
{
tcs.getRawData(&r, &g, &b, &c);
r_1=r;b_1=b;g_1=g;
r_1 /= c;g_1 /= c;b_1 /= c;
r_1*= 256; g_1 *= 256; b_1 *= 256;
//以上部分是讀取各個顏色的值并處理后賦給r_1,b_1,g_1
//這一部分是將讀取的值拿來判斷得到顏色
if(*frequency<16)//計次如果進入定時器小于16次進行第一次顏色識別
{
if(min_value1[0]<r_1)//如果r_1大于閾值min_value1[0]則是紅色以此類推
{
*value1=1;//賦值判斷顏色,1代表紅色
}
else if(min_value1[1]<g_1)
{
*value1=2;//綠色
}
else if(min_value1[2]<b_1)
{
*value1=3;//藍色
}
}
else//如果計次大于16次進行第二次顏色識別
{
if(min_value2[0]<r_1)
{
*value2=-1;
//Serial.print("紅 ");
}
else if(min_value2[1]<g_1)
{
*value2=-2;
//Serial.print("綠 ");
}
else if(min_value2[2]<b_1)
{
*value2=-3;
//Serial.print("藍 ")
}
}
}
3.2 扎氣球代碼
通過小車在舵機上的連接桿,使用顏色傳感器進行目標(biāo)檢測,舵機帶動連接桿進行旋轉(zhuǎn)和刺破氣球的操作,實現(xiàn)了全地形小車在不同環(huán)境下的氣球刺破功能,以下是小車扎氣球代碼:
void task1()
{
if((yanse_value1==1||yanse_value1==2||yanse_value1==3)&&yanse_value2==0)//第一次顏色識別到后會將給yanse_value1賦值根據(jù)賦值判斷顏色
{
xunji();
if(time>50&&zx1==0)
{
servo(servo_yanchuan,second_color_jiaodu);//顏傳電機初始角度,識別到顏色后會將顏色傳感器電機轉(zhuǎn)動
zx1=1;
}
jici++;//計次等到一定次數(shù)時才進行第二次識別
}
if(yanse_value2!=0&&zhongzhi==0)
{
all_value=yanse_value1+yanse_value2;//將兩次識別到的顏色標(biāo)志位相加得到0說明識別到一樣的顏色
if(all_value==0)
{
stop();//停止
servo(servo_zhaqiu,zhaqiu_jiaodu);//舵機轉(zhuǎn)動扎球
zhongzhi=1;
delay(80000);
servo(servo_zhaqiu,yuanshi_jiaodu);//舵機轉(zhuǎn)動回原位
}
}
}
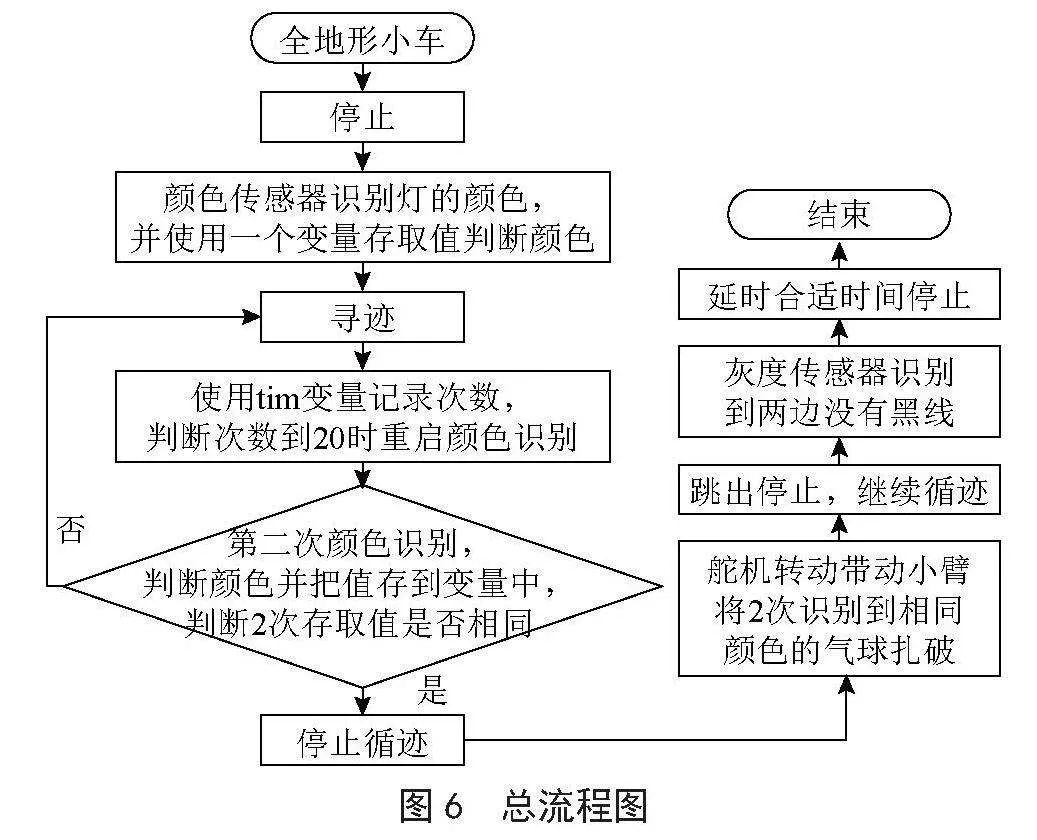
3.3 總流程設(shè)計
灰度傳感器等模塊開始工作,顏色傳感器第一次識別信號燈的顏色,并使用一個變量存取值來判斷顏色。然后執(zhí)行尋跡方案。在循跡過程中,使用tim變量記錄次數(shù),判斷次數(shù)到20時重啟顏色識別,進行第二次顏色識別,如果相同便停止循跡,使用扎破氣球裝置將氣球扎破,之后接著循跡,到合適時間停止循跡結(jié)束整個流程,如圖6所示。
4 結(jié) 論
測試、調(diào)試完成智能移動機器人的設(shè)計,制造出一臺智能移動機器人。該機器人能夠自主循跡、窄橋爬坡、上樓梯、通過管道、信息交互扎破對應(yīng)顏色氣球。本次制作的智能移動機器人,有著獨特的輪子結(jié)構(gòu),速度較快結(jié)構(gòu)簡單,有著強大的行動力能夠應(yīng)付階梯等復(fù)雜地形。
參考文獻:
[1] 孟宏君.新工科背景下高校機械電子專業(yè)人才培養(yǎng)路徑探析 [J].教育理論與實踐,2023,43(12):17-19.
[2] 王偉柯,陳帥興,鐘協(xié)城,等.基于樹莓派控制的全地形小車研制 [J].機械,2023,50(8):63-68+74.
[3] 吳利剛,雷偉強,周倩,等.多方協(xié)同開展應(yīng)用型本科院校智能制造新工科人才培養(yǎng)體系探究 [J].中國現(xiàn)代教育裝備,2021(9)78-80.
[4] 鄭靈潔,胡曉軍,陳靜儀,等.基于探索者平臺的全地形機器人設(shè)計與實現(xiàn) [J].湖州師范學(xué)院學(xué)報,2021,43(2):70-73.
[5] 牟文昌加,陳建宏.基于ATMEGA328控制器的全地形小車的設(shè)計與實現(xiàn) [J].自動化技術(shù)與應(yīng)用,2020,39(10):14-18.
[6] 任玲玲,李浪,閆庚龍,等.基于Arduino的藍牙智能避障小車設(shè)計 [J].電子制作,2022,30(19):27-30+97.
[7] 鄭才國,肖梁.全地形小車設(shè)計與實現(xiàn) [J].現(xiàn)代機械,2019(3):44-47.
[8] 李志強,康欽清,肖玉亮,等.基于Arduino的智能小車設(shè)計與實現(xiàn) [J].無線互聯(lián)科技,2022,19(16):43-46.
[9] 劉孝賢,余江,鄭徐凱,等.基于STM32的全地形越障排爆機器人設(shè)計 [J].機械,2022,49(9):76-80.
[10] 蘇春錦.基于Arduino智能小車避障系統(tǒng)設(shè)計 [J].福建農(nóng)機,2023(1):33-36.
作者簡介:邢朝俊(2003—),男,漢族,河南上蔡人,本科在讀,研究方向:機械設(shè)計;通信作者:冉龍姣(1987—),女,漢族,四川達州人,實驗師,碩士,研究方向:機械設(shè)計。
DOI:10.19850/j.cnki.2096-4706.2024.17.032
收稿日期:2024-01-02
基金項目:2023年四川省大學(xué)生創(chuàng)新創(chuàng)業(yè)訓(xùn)練計劃項目(S202311079050)
Production of Intelligent Mobile Robot Based on Arduino
XING Chaojun, RAN Longjiao, ZHONG Bin, LONG Qiujie, HUANG Anjie
(School of Mechanical Engineering, Chengdu University, Chengdu 610106, China)
Abstract: In response to the call for “Emerging Engineering Education” and in order to promote the cultivation of innovative and entrepreneurial talents, this paper combines with the Mountain Collaborative Logistics Relay Track of 2023 Sichuan University Students Engineering Training Comprehensive Ability Competition, which integrates competition and education, and realizes collaborative education between schools and enterprises. It studies an intelligent mobile all-terrain mobile robot based on Arduino platform. The mechanical structure, hardware module, and software module are designed, so that the independently designed and produced all-terrain mobile robot can realize the functions of autonomous tracking, narrow bridge climbing, climbing stairs, passing through pipes, and information interaction to pierce the corresponding color balloons. Through the training of this project, the engineering innovation consciousness of university students is cultivated and the engineering practice ability is improved.
Keywords: all-terrain mobile robot; structural design; Arduino
