機載LiDAR點云密度對輸電線路工程斷面提取精度機載LiDAR點云密度對輸電線路工程斷面提取精度
2024-10-21 00:00:00李沛潔韓文軍張亞平
標準科學 2024年13期


摘 要:機載激光雷達(LiDAR)技術是現代地理信息采集的重要手段之一,因其高精度、高效率的特點,已在輸電線路工程的勘測設計中得到了廣泛應用。本文針對《110kV及以上架空輸電線路勘測設計無人機激光雷達系統標準》試驗驗證要求,基于實際工程項目數據,具體分析了不同地面點點云密度、不同斷面提取方法對輸電線路工程斷面提取精度的影響情況,試驗驗證表明點云密度對斷面提取精度的影響具有一定的正相關性,地面點點云在生成DEM的過程中存在一定的精度損失,而且隨著點云密度的降低誤差顯著增大,尤其是在地形復雜區域。通過研究,建議在實際項目生產過程中采用直接點云法進行斷面提取,以最大程度保留激光點云數據的原始精度水平。
關鍵詞:無人機, 激光雷達, 點云密度, 輸電線路工程, 斷面提取
0 引 言
機載LiDAR技術是現代地理信息采集的重要手段之一,因其高精度、高效率的特點,已在輸電線路工程的勘測設計中得到了廣泛應用。輸電線路工程的勘測設計需要精確的地形數據,而機載LiDAR技術能夠快速獲取大范圍、高精度、精細的地形信息[1],為輸電線路工程勘測設計提供精確、可靠的數據支撐。
機載LiDAR技術在輸電線路工程勘測設計中的應用比較廣泛,在線路通道走廊規劃、路徑優化選線設計方面,通過對點云數據的處理,可以生成高精度的數字高程模型(DEM)或三維mesh模型,精確表達線路通道走廊沿線的地形起伏、坡度等信息,在此基礎上可實現針對復雜地形的準確分析,從而降低工程技術風險和造價成本。機載LiDAR能夠快速獲取大范圍的高分辨率地形數據,基于此在設計階段進行多方案比選,可優化線路走廊的路徑,降低施工難度和工程造價成本。機載LiDAR數據能夠提供精確的三維坐標,為輸電線路工程的塔位選址提供可靠的地形依據,確保每個桿塔位都具備最優的地形條件和精準定位。利用點云非地面點數據,可以識別輸電線路沿線的建(構)筑物、交叉跨越、林木等障礙物,在線路優化設計過程中,可以準確量測新建線路與地物的空間位置關系,避免傳統測量方法中的誤差,提高工程設計的準確性,進而優化桿塔位置,避免潛在的安全隱患。在工程量計算與設計優化方面,通過LiDAR數據生成的高精度三維地形模型,可以精確計算工程所需的挖填土方量,優化設計方案,降低工程造價。在環境影響評估方面,LiDAR點云數據可以反映通道內地面植被的高度和分布情況,輔助工程師進行環境影響評估,如:線路對森林、濕地等敏感區域的影響。優化線路設計,盡量減少對生態環境的破壞。
點云密度作為LiDAR數據的關鍵指標參數,直接影響了輸電線路工程斷面提取的精度和效率。本文旨在驗證標準技術要求,分析點云密度對輸電線路工程斷面提取精度的影響,并提出不同地形環境下點云數據提取建議。
1 試驗驗證方法
1.1 點云密度的表征方式
點云密度通常用來表征LiDAR數據的稠密程度,它是指在單位面積內所獲得的點云數據點的數量。點云密度的表征方式可分為平面密度表征和三維空間密度表征。
平面密度表征,是指在二維平面上,點云數據通常被投影在XY平面上,使用平面點的密度值作為點云密度的表征。這種方式相對簡單,但只能反映二維空間內的密度分布情況。
三維空間密度表征,為了更準確地反映點云數據的三維空間分布特征,研究者們提出了多種點云三維空間密度表征方式:單元格劃分法,將測區劃分為小的單元格(如立方體),通過計算單元格內點的數量與單元格體積的比值來表征密度。這種方法能夠較好地反映三維空間內點云的密集程度;距離密度,基于點云中各散點之間的距離來計算密度。常見的做法是求取點云中每個點到其最近點的平均距離,以此作為距離密度的度量。這種方法能夠反映點云在空間中的分布緊密程度;聚類分析,利用聚類的思想將原始點云數據中密度相連的點聚集為簇集合,用以區分正常點云與異常噪聲。這種方法不僅考慮了點云的密度特征,還結合了空間分布特性。
1.2 點云密度標準化表征與計算
標準化表征,為了統一不同來源、不同分辨率的點云數據的密度表征方式,一些標準化方法被提出,例如GB/T 36100-2018《機載LiDAR點云數據質量評價指標及計算方法-規范》等標準文件為點云密度的計算和評價提供了規范化的指導。
在實際應用中,點云密度的計算通常涉及以下步驟。
(1)數據讀取:首先讀取點云數據文件,獲取點云的XYZ坐標等基本信息。
(2)劃分單元:根據需要選擇適當的單元劃分方式(如:平面網格、三維立方體等),并將測區劃分為若干單元。
(3)密度計算:對每個單元內的點云進行計數,并計算其與單元面積(或體積)的比值,得到該單元的密度值。
1.3 提取精度與數據的完整性
本次實驗為分析點云密度與斷面提取精度之間的關系,需重點對以下兩個關鍵指標進行闡述。
提取精度:數據的精度評估通常通過對比機載LiDAR采集的點與高精度地面實測點之間的距離、高程和水平角誤差來進行。此外,還可以將機載LiDAR數據與傳統的測量方法(如:全站儀測量、GPS測量)或真實的三維模型進行對比,以驗證其精度,本次實驗將通過使用外業實測數據作為參考,對提取的斷面進行精度評估[2]。
數據完整性:是指機載激光雷達系統在采集和處理點云數據時,所獲得的數據在完整性方面所滿足的特定要求和標準。機載激光點云數據在采集、傳輸、處理及存儲過程中,保持其原有信息的完整無缺,不出現遺漏、缺失或損壞的狀態。尤其是數據連續性,點云數據在空間和時間上應保持連續的特性,不出現斷裂、跳躍或缺失的情況。這有助于保持數據的完整性和連貫性,它是衡量點云數據質量的重要指標之一,直接關系到數據的可用性和后續應用的可靠性[3]。
1.4 斷面提取與精度對比分析方法
本實驗采用了兩種典型的斷面提取方法。直接點云法:通過對原始點云數據的分類和擬合,直接提取輸電線路的路徑斷面。數字高程模型(DEM) 法: 生成DEM后,在該模型上進行斷面提取,特別適合復雜地形條件。
精度對比分析方法,采用相對精度對比分析和絕對精度對比分析兩種方法。相對精度對比分析主要是將濾波處理后的地面點云數據,依據其原始點云密度生成DEM(5m格網間距),將抽希后不同點云密度情況下生成的DEM,依據本輸電線路工程路徑,按照5m采樣間隔,進行路徑中心線斷面點的高程值提取與比較,從而分析其相對精度情況。絕對精度對比分析方法是指在本實驗工程路徑上均勻布設檢查點,外業采用RTK設備實地測量檢查點的高程,并將其分別與原始點云密度和抽希后不同點云密度生成的DEM,進行對比分析計算,以分析其絕對精度情況。
2 試驗驗證設計與結果分析
2.1 試驗設計依據
本次實驗設計技術依據為IEEE《110kV以上架空輸電線路無人機激光雷達測量與設計標準》中,第6.4.1條第2款:DSM、DEM成果格網間距不應大于5m,高程取值到0.01m,宜根據DSM、DEM插值效率、效果以及工程需求,合理選擇插值尺寸與方法,插值尺寸宜與點云數據的平均點間距相近。第7.2.1條:平斷面圖的成圖比例尺采用水平1:5000、垂直1:500。平斷面圖數字化測繪范圍為線路路徑兩側各50m。第7.2.2條:平斷面圖采用點云數據、DEM、DOM測繪。地物平面位置在三維立體模型或DOM中測繪,高程信息通過DEM或點云數據獲取。第7.2.3條:中心線和邊線斷面數據采用DEM或點云分類地面點自動采集,取點間距5m。
2.2 試驗方案設計
本次實驗基于無人機機載激光雷達系統獲取的點云數據,經過點云預處理、點云去噪、分類、地面點提取和坐標系轉換等處理,最終得到地面點點云數據。按照100%、80%、60%不同地面點抽希保留率,分別應用直接點云法和數字高程模型(DEM)法,在對應模型上進行路徑斷面提取,最后基于外業實測斷面點數據進行精度對比,沿線共計采集了29個外業RTK實測斷面點,以分析斷面精度變化情況。
2.3 試驗項目概況
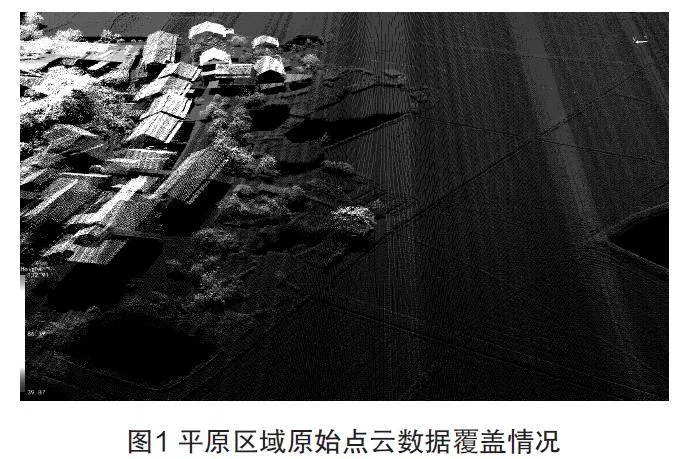
本次實驗項目依托湖南省某500kV線路工程,項目位于湖南省衡陽市,測區內包括平原、丘陵和山地地形地貌,海拔高度30~440m,高差410米。植被主要以水田、灌木、雜樹為主,測區內交通便利,便于開展無人機航飛作業。本次項目無人機平臺采用的是CW-25E長續航固定翼垂直起降無人機飛行平臺,搭載可見光S420航測模塊獲取光學影像數據,激光點云數據獲取采用RIEGL VUX-1LR-22機載激光雷達系統。
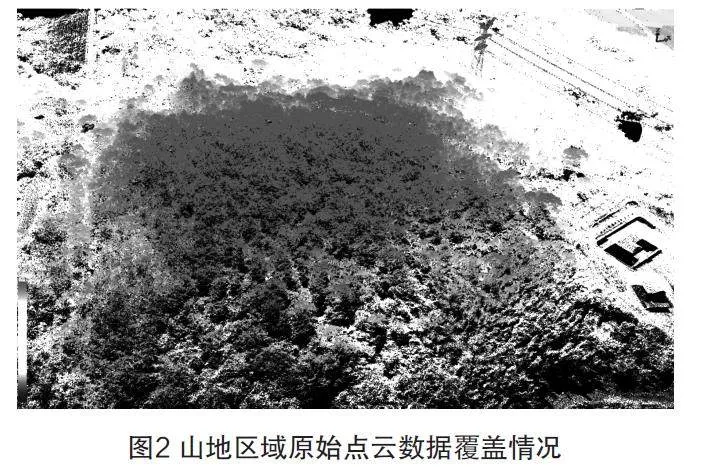
實驗中平原及山地區域原始點云數據覆蓋情況分別如圖1、圖2所示。
2.4 試驗數據分析與評估
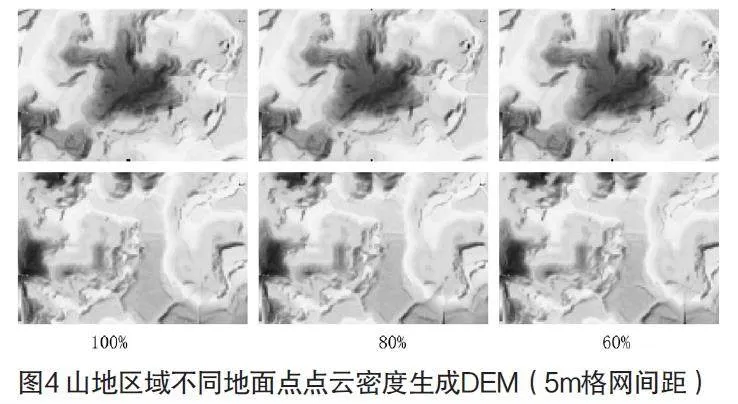
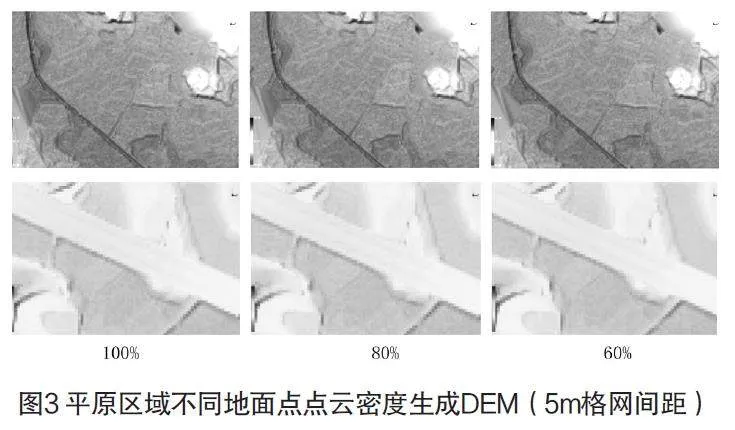
首先依據100%、80%、60%不同地面點抽希保留率,生成對應DEM,圖3、圖4分別為平原、山地區域局部路徑DEM生成效果截圖,可以看出DEM數據效果差異不明顯。
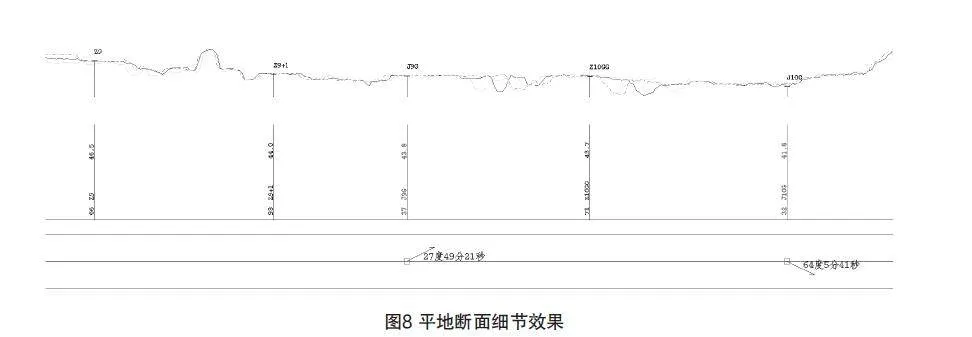
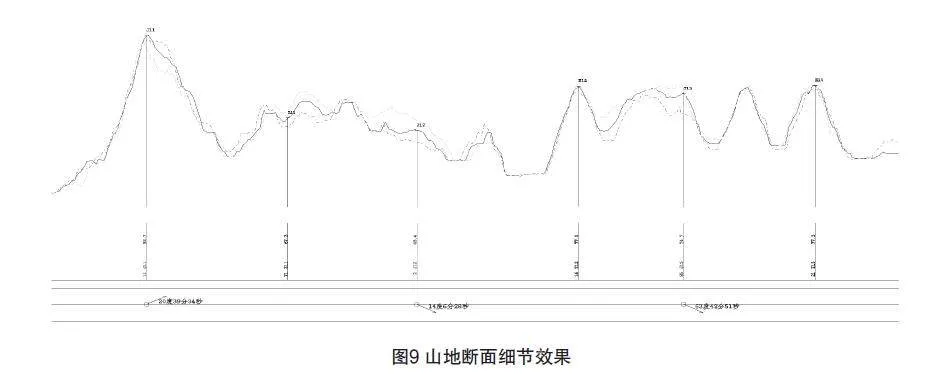
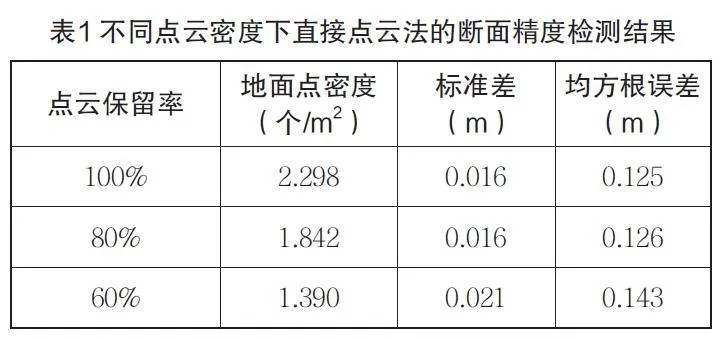
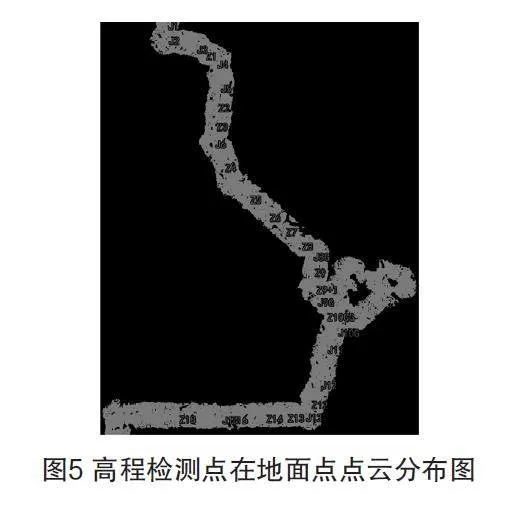
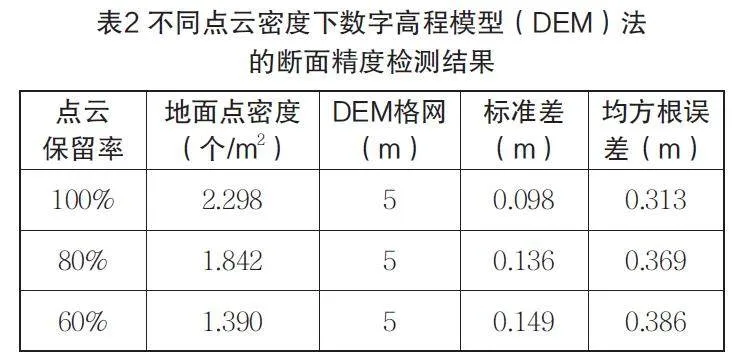
為分析不同的點云抽希比例下對應斷面提取精度的情況,根據路徑走向,在路徑斷面上布設了29個高程檢測點,詳見圖5、圖6。分別基于直接點云法和數字高程模型 (DEM)法,進行路徑斷面的自動提取、數據分析與計算。圖7、圖8、圖9為路徑斷面自動提取效果;表1為不同點云密度下直接點云法的斷面精度檢測結果。表2為不同點云密度下數字高程模型(DEM)法的斷面精度檢測結果。
2.5 試驗結果分析
提取精度: 隨著點云密度的增加,基于直接點云法和數字高程模型(DEM)法,斷面提取的精度有一定的提高,但精度提升變化不明顯,其均方根誤差在1.8~7.3cm以內(詳見表1、表2)。然而,基于直接點云法提取的斷面精度整體水平,明顯優于數字高程模型(DEM)法,其均方根誤差相差為18.8~24.3cm(詳見表1、表2),因此表明,地面點點云在生成DEM的過程中,存在一定的精度損失,而且隨著點云密度的降低,誤差顯著增大,尤其是在地形復雜區域。在實際項目生產過程中,建議采用直接點云法進行斷面提取,以最大程度保留激光點云數據的原始精度水平。
數據完整性:高密度點云在植被覆蓋和復雜地形下的完整性表現更好,能夠捕捉到更多的地形細節和線路特征點。而低密度點云則可能出現數據空洞,影響斷面的連續性。
3 結 論
本文系統分析了無人機機載激光點云密度對輸電線路工程斷面提取精度的影響。通過試驗表明:首先,點云密度對斷面提取精度的影響具有一定的正相關性。其次,地面點點云在生成DEM的過程中,存在一定的精度損失,而且隨著點云密度的降低,誤差顯著增大,尤其是在地形復雜區域。在實際工程中,建議采用直接點云法進行斷面提取,以最大程度保留激光點云數據的原始精度水平,并根據斷面提取的精度需求,以及工程的地形復雜度,合理選擇點云密度,在復雜地形或關鍵區域采用較高密度的點云數據,而在常規區域使用較低密度的數據以提高數據加載效率。未來研究可以進一步探索點云密度與其他數據融合技術(如:多光譜影像、SAR數據)的結合,提升斷面提取的自動化程度和精度,挖掘激光點云數據在輸電線路工程中的深度應用。此外,可以進一步研究不同的DEM插值方法對路徑斷面的提取精度的影響情況,并基于機器學習的方法也可以應用于優化點云數據的采樣和處理流程。
參考文獻
[1]高勝超,高彥濤,王文杰. 機載LiDAR在河南省重點水庫庫區高精度DEM建立中的應用 [J]. 測繪通報, 2022(01):128-132.
[2]趙文東,劉學仁,朱發浩,等. 傾斜攝影測量在復雜空域及地形條件下高精度三維建模研究 [J]. 測繪通報,2021(S1): 25-28.
[3]范素瑩,張雯欣,徐文兵. 機載雷達點云數據提取地面DEM的方法研究 [J]. 安徽地質, 2022(S2): 10-14.
