無人機(jī)智能維保工具在輸電線路智能運(yùn)維中的應(yīng)用
2024-10-15 00:00:00錢曉明
今日自動(dòng)化 2024年3期
[摘 要]隨著無人機(jī)技術(shù)的不斷發(fā)展和普及,其在輸電線路智能運(yùn)維中應(yīng)用廣泛,因此無人機(jī)的維護(hù)和保養(yǎng)需求也在逐漸增加。為了滿足這一需求,開發(fā)一種智能維保工具,以提高無人機(jī)維護(hù)和保養(yǎng)的管理效率和準(zhǔn)確性,具有重要意義。文章旨在探討無人機(jī)智能維保管理工具的開發(fā)目的和意義,為無人機(jī)在輸電線路智能運(yùn)維中的深化應(yīng)用提供有力支持。
[關(guān)鍵詞]架空輸電線路;無人機(jī)維護(hù)保養(yǎng);無人機(jī)維保管理工具
[中圖分類號(hào)]TM755 [文獻(xiàn)標(biāo)志碼]A [文章編號(hào)]2095–6487(2024)03–0068–03
無人機(jī)是輸電數(shù)字化轉(zhuǎn)型中機(jī)巡作業(yè)的直接載體,其在巡視中或大或小會(huì)發(fā)生一定損耗。其維保過程中帳卡物3 者在維保交接中極易混淆,不利于管理,人工成本極大,且維保后期不利于統(tǒng)計(jì)分析及數(shù)據(jù)透視。
當(dāng)前,針對(duì)無人機(jī)維護(hù)保養(yǎng)的管理工具主要依賴于傳統(tǒng)的OFFICE 表單管理方式,其效率和準(zhǔn)確性都有待提高。現(xiàn)階段使用表單僅可實(shí)現(xiàn)保存訴求,且存在數(shù)據(jù)不透明等問題,無法實(shí)現(xiàn)界面化、流程化的直觀體現(xiàn),工作流程不清晰且不便于查找追溯各工作流程節(jié)點(diǎn)上每臺(tái)無人機(jī)的出入庫狀態(tài)、維保狀態(tài)、借用狀態(tài)。
1 輸電線路智能運(yùn)維中無人機(jī)技術(shù)應(yīng)用場(chǎng)景
1.1 無人機(jī)通信技術(shù)
將無人機(jī)用于輸電線路智能運(yùn)維巡檢時(shí),通信系統(tǒng)是不可缺少的環(huán)節(jié)。對(duì)通信模塊進(jìn)行適當(dāng)?shù)脑O(shè)計(jì),可為無人機(jī)和地面站之間的通信創(chuàng)造一個(gè)有利的環(huán)境,防止由于通信不及時(shí)而對(duì)運(yùn)維檢修造成不利的影響。在巡檢過程中,監(jiān)控裝置會(huì)對(duì)輸電線路進(jìn)行數(shù)據(jù)采集,并通過通信模塊向地表傳送信息。通過對(duì)現(xiàn)場(chǎng)相關(guān)工作人員的影像資料進(jìn)行綜合的分析,可對(duì)輸電線的各個(gè)環(huán)節(jié)都有完整的了解。若出現(xiàn)問題,可及時(shí)派專人進(jìn)行處置。在操作過程中,要使通信組件處于完好狀態(tài),保證在惡劣的氣候條件下,通信模組仍可進(jìn)行良好的通信。
1.2 無人機(jī)雷達(dá)技術(shù)
以雷達(dá)為核心的無人機(jī),在運(yùn)行維護(hù)期間,可將環(huán)境、氣象等因素的影響降到最低。三維激光雷達(dá)可通過對(duì)周邊的林木等環(huán)境信息進(jìn)行掃描,在得到了這些信息數(shù)據(jù)后,工作人員會(huì)進(jìn)行一次綜合的評(píng)價(jià)和分析,以實(shí)現(xiàn)對(duì)輸電線和樹干等環(huán)境因素的準(zhǔn)確測(cè)量,推動(dòng)運(yùn)維檢修工作的正常開展。
1.3 無人機(jī)駕駛技術(shù)
在輸電線路智能運(yùn)維過程中,無人機(jī)駕駛也是一項(xiàng)重要的技能。該技術(shù)可為有關(guān)人員提供高質(zhì)量和高效率的運(yùn)維檢修服務(wù)。具體體現(xiàn)在受交通、氣象等多方面的影響,輸電線路的運(yùn)維面臨嚴(yán)峻的考驗(yàn),而無人駕駛則可解決這個(gè)問題,工作人員只需操縱著無人機(jī),就可進(jìn)行運(yùn)維巡檢。
2 無人機(jī)巡檢的應(yīng)用
(1)巡檢準(zhǔn)備工作。在對(duì)輸電線路進(jìn)行巡檢時(shí),需對(duì)智能無人機(jī)進(jìn)行合理的安裝,保證其使用效果,充分發(fā)揮其使用功能,并在執(zhí)行前做好準(zhǔn)備工作。先要對(duì)適合起降的地點(diǎn)進(jìn)行實(shí)地勘察,避開市中心等復(fù)雜區(qū)域,與人群保持一定的距離,并保證無人機(jī)的運(yùn)行狀態(tài)。在無人機(jī)飛行的過程中,很有可能會(huì)受到高樓大廈、樹木等障礙物的干擾。因此,一定要注意無人機(jī)的飛行高度,在開始升空前,要對(duì)巡視區(qū)域的高層目標(biāo)進(jìn)行環(huán)境調(diào)查,并將其控制在距離障礙物2.5~5 m 的低空。
(2)巡檢航線的設(shè)計(jì)。在使用智能無人機(jī)設(shè)備進(jìn)行巡視作業(yè)前,要先進(jìn)行飛行路線的規(guī)劃,目前有兩種路線,一種是三角形路線,另一種是直線路線。具體來說,三角形飛行路線更適合智慧無人機(jī)的起降路線,適用于大跨度的路線。但是這種路徑規(guī)劃模式,在正式應(yīng)用到電網(wǎng)巡視過程中時(shí),無人機(jī)的控制難度會(huì)增大,這就要求執(zhí)行人員對(duì)無人機(jī)的工作方法熟練掌握,從而能夠更好地進(jìn)行辨識(shí)和調(diào)節(jié)控制工作。相對(duì)于三角形路線,直線路線更適合場(chǎng)地平坦、跨度較短的輸電線路,在進(jìn)行智能化的無人機(jī)設(shè)備巡視工作時(shí),要對(duì)線路巡視的次序進(jìn)行科學(xué)的安排,從而保證巡視的總體效果。
(3)數(shù)據(jù)資料庫設(shè)計(jì)。數(shù)據(jù)資料庫的設(shè)計(jì)需要考慮到數(shù)據(jù)的采集、存儲(chǔ)、管理、分析和應(yīng)用等多個(gè)方面。
數(shù)據(jù)采集是資料庫的基礎(chǔ),智能無人機(jī)搭載的傳感器和攝像頭能夠?qū)崟r(shí)捕捉到巡檢區(qū)域的高清圖像和視頻,以及溫度、濕度、氣壓等環(huán)境參數(shù)。這些數(shù)據(jù)通過無線網(wǎng)絡(luò)傳輸至數(shù)據(jù)中心,以為后續(xù)的數(shù)據(jù)處理和分析提供原材料。
在數(shù)據(jù)存儲(chǔ)方面,資料庫需要有足夠的存儲(chǔ)空間來存放大量的巡檢數(shù)據(jù)。同時(shí),為了保證數(shù)據(jù)的完整性和安全性,需要采用先進(jìn)的數(shù)據(jù)備份和恢復(fù)技術(shù),確保在任何情況下數(shù)據(jù)都不會(huì)丟失或損壞。
管理方面,智能無人機(jī)巡檢數(shù)據(jù)資料庫需要一個(gè)強(qiáng)大的管理系統(tǒng)來對(duì)數(shù)據(jù)進(jìn)行分類、索引和檢索。這個(gè)系統(tǒng)應(yīng)能根據(jù)不同的巡檢任務(wù)、時(shí)間和地點(diǎn)等因素,快速地找到所需的數(shù)據(jù)。此外,管理系統(tǒng)還應(yīng)該具備權(quán)限控制功能,確保只有授權(quán)用戶才能訪問敏感數(shù)據(jù)。
數(shù)據(jù)分析是資料庫的核心。通過對(duì)巡檢數(shù)據(jù)進(jìn)行深入分析,可發(fā)現(xiàn)設(shè)施的潛在問題和風(fēng)險(xiǎn),從而采取預(yù)防措施避免事故的發(fā)生。此外,數(shù)據(jù)分析還可用于優(yōu)化巡檢路線,提高巡檢效率。
最后,智能無人機(jī)巡檢數(shù)據(jù)資料庫的設(shè)計(jì)還需要考慮數(shù)據(jù)的應(yīng)用場(chǎng)景。如通過與地理信息系統(tǒng)(GIS)的結(jié)合,可在地圖上直觀地展示巡檢數(shù)據(jù),幫助決策者更好地理解巡檢區(qū)域的情況。同時(shí),數(shù)據(jù)資料庫還可以與其他業(yè)務(wù)系統(tǒng)對(duì)接,實(shí)現(xiàn)數(shù)據(jù)共享和交換。
3 無人機(jī)智能維保工具管理思路
建立系統(tǒng)管理無人機(jī)臺(tái)賬及維保信息臺(tái)賬,管理無人機(jī)維保的入庫、出庫;可掃描無人機(jī)機(jī)身二維碼并自動(dòng)添加維保記錄及信息歸檔;具備模板可編輯功能,報(bào)修時(shí)可現(xiàn)場(chǎng)完善表單信息;具備保單信息跟蹤,到期預(yù)警功能;具備維保信息追溯功能。
開發(fā)電腦端和移動(dòng)端App,電腦端主要用于查看設(shè)備情況、查詢統(tǒng)計(jì)和資料導(dǎo)入導(dǎo)出。移動(dòng)端主要用于日常業(yè)務(wù)管理和信息登記,并使電腦端和移動(dòng)端實(shí)現(xiàn)共享互聯(lián)、數(shù)據(jù)同步。
4 技術(shù)關(guān)鍵點(diǎn)及創(chuàng)新點(diǎn)
技術(shù)關(guān)鍵點(diǎn):①通過研制的單機(jī)軟件工具能建立無人機(jī)智能維保工具可視化臺(tái)賬,同時(shí)存儲(chǔ)歸檔各類保險(xiǎn)表單數(shù)據(jù);②軟件工具可掃描無人機(jī)機(jī)身二維碼與導(dǎo)入臺(tái)賬匹配,形成維保記錄;③將軟件工具安裝在移動(dòng)設(shè)備上,實(shí)現(xiàn)二維碼掃碼或SN錄入、表單編輯、數(shù)據(jù)歸檔、保單信息跟蹤、借出借入信息登記等功能,實(shí)現(xiàn)設(shè)備全生命周期管控,后期又可做為設(shè)備臺(tái)賬信息及維保數(shù)據(jù)透視運(yùn)用。
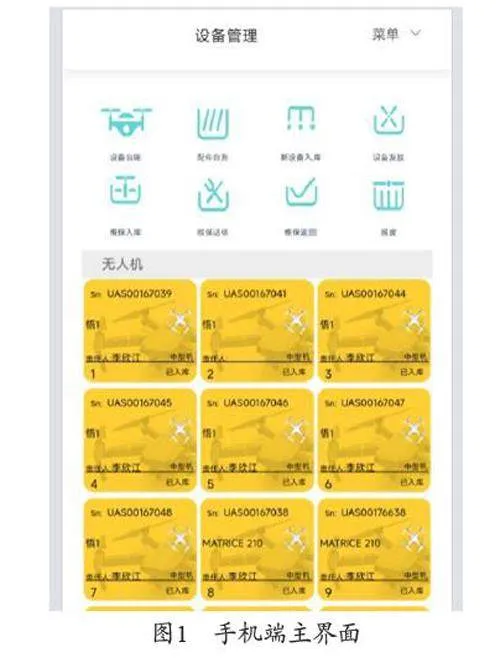
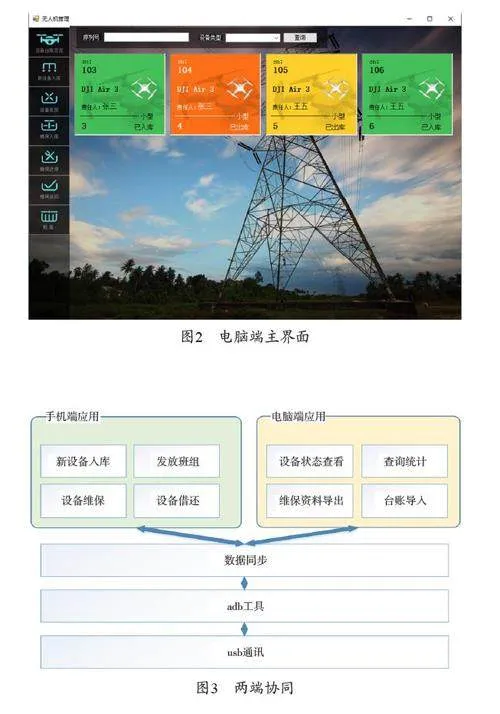
創(chuàng)新點(diǎn):①通過軟件系統(tǒng)調(diào)用手機(jī)端攝像頭掃描無人機(jī)及配件固有的二維碼條形碼快速獲取SN 編碼;②通過軟件系統(tǒng)建立無人機(jī)及其配件卡片臺(tái)賬并著色,以快速區(qū)別新設(shè)備入庫、設(shè)備發(fā)放、維保入庫、維保送修、維保返回以及設(shè)備借用管理、設(shè)備報(bào)廢等設(shè)備的所處業(yè)務(wù)環(huán)節(jié)狀態(tài)信息;③通過軟件系統(tǒng)建立新設(shè)備入庫、設(shè)備發(fā)放、維保入庫、維保送修、維保返回以及設(shè)備借用管理、設(shè)備報(bào)廢等導(dǎo)航模塊,快速切入到需要開展的業(yè)務(wù)操作模塊;④通過軟件系統(tǒng)記錄各臺(tái)設(shè)備在每一次業(yè)務(wù)流程操作的詳細(xì)操作信息和時(shí)間信息,做到設(shè)備全生命周期監(jiān)視及管理;⑤移動(dòng)設(shè)備端可便攜移動(dòng)掃碼登記,電腦端可總覽設(shè)備狀態(tài)及報(bào)告生成,兩端軟件實(shí)現(xiàn)共享互聯(lián)、數(shù)據(jù)同步。手機(jī)端主界面如圖1 所示,電腦端主界面如圖2 所示。
5 工具開發(fā)技術(shù)方案
采用移動(dòng)App 及電腦端應(yīng)用技術(shù),從便捷、靈活、實(shí)用角度出發(fā),設(shè)計(jì)開發(fā)一款無人機(jī)智能維保管理軟件工具。
(1)手機(jī)端日常業(yè)務(wù)管理。基于二維碼、條碼識(shí)別技術(shù),結(jié)合日常業(yè)務(wù)管理需要,快速掃碼更新設(shè)備狀態(tài)及信息登記,便于日常業(yè)務(wù)登記工作。
(2)無人機(jī)及配件查詢統(tǒng)計(jì)。通過數(shù)據(jù)查詢和統(tǒng)計(jì),便于查看跟蹤無人機(jī)的使用情況。
(3)手機(jī)端電腦端聯(lián)動(dòng)。通過簡單便捷的方式,實(shí)現(xiàn)手機(jī)端應(yīng)用與電腦端應(yīng)用的數(shù)據(jù)同步。
(4)用戶界面。開發(fā)簡潔明了、易操作的用戶界面,使用戶可以方便快捷地使用工具進(jìn)行無人機(jī)管理。
兩端協(xié)同如圖3 所示,手機(jī)端主要用于日常業(yè)務(wù)管理和信息登記;電腦端主要用于查看設(shè)備情況、查詢統(tǒng)計(jì)和資料導(dǎo)入導(dǎo)出;通訊是基于USB 通訊及adb工具,實(shí)現(xiàn)手機(jī)端應(yīng)用和電腦端應(yīng)用的數(shù)據(jù)一致性。
6 結(jié)束語
無人機(jī)智能維保工具將顯著提升無人機(jī)的維護(hù)保養(yǎng)管理效率和準(zhǔn)確性,不僅可全面管理無人機(jī)資產(chǎn),且可將維保過程中帳卡物的關(guān)系清晰明了的展示出來,具有巨大的實(shí)用價(jià)值和市場(chǎng)前景。未來,還應(yīng)繼續(xù)優(yōu)化和完善這款工具,以更好地服務(wù)于輸電線路無人機(jī)深化應(yīng)用的發(fā)展。
參考文獻(xiàn)
[1] 應(yīng)恭偉,潘增輝,蔣雅妮,等. 植保無人機(jī)信息化管理的應(yīng)用與分析—— 以東陽市應(yīng)用為例[J]. 現(xiàn)代農(nóng)機(jī),2023(3):1-3.
[2] 馬忠梅,韓寶卿,李文娟,等. 智能識(shí)別技術(shù)在無人機(jī)輸電線路巡檢中的應(yīng)用[J]. 集成電路應(yīng)用,2022,39(8):126-127.
[3] 黎文俊. 基于智能巡檢機(jī)器人的輸電線路運(yùn)維管理工作研究[J]. 農(nóng)村電氣化,2023(5):72-74.
[4] 賀蘭山. 無人機(jī)在輸電線路運(yùn)維檢修中的應(yīng)用[J]. 電力系統(tǒng)裝備,2022(5):131-133.
[5] 姬鵬博,尚夢(mèng)云,張燕琴,等. 基于MRO 系統(tǒng)的彩虹無人機(jī)售后管理模式[J]. 航天工業(yè)管理,2022(S1):49-52.
[6] 邢孝龍,姜馬超,楊碩. 無人機(jī)在輸電線路設(shè)備巡檢驗(yàn)收中的應(yīng)用研究[J]. 中文科技期刊數(shù)據(jù)庫(引文版)工程技術(shù),2022(8):287-289.
[7] 郭智俊,丁莞爾,周劍武,等. 無人機(jī)智能巡檢在光伏電站組件診斷中的應(yīng)用[J]. 能源工程,2022(2):40-44.
