基于神經網絡的汽輪機及其輔助系統控制策略優化研究
2024-10-15 00:00:00孫毅
今日自動化 2024年3期

[摘 要] 文章針對汽輪機及其輔助系統控制策略的優化問題,提出了一種基于神經網絡的研究方法。通過建立神經網絡模型,實現對汽輪機運行狀態的智能監測和優化控制。通過對實際案例的仿真與分析,驗證了該方法的有效性和實用性。研究結果表明,基于神經網絡的汽輪機控制策略優化能夠提高系統的穩定性和效率,為汽輪機運行管理提供了新的技術途徑。
[關鍵詞]汽輪機;神經網絡;控制策略;優化;輔助系統
[中圖分類號]TP273.5 [文獻標志碼]A [文章編號]2095–6487(2024)03–0007–03
汽輪機及其輔助系統在能源轉換領域中扮演著重要的角色,其性能優化對于提高能源利用效率至關重要。傳統的控制策略通常難以滿足系統復雜性和動態性的要求,因此需要更為智能和適應性的控制方法。神經網絡作為一種模擬人腦學習和記憶機制的計算模型,具有強大的非線性映射能力,能夠適應系統的復雜性。文章旨在通過引入神經網絡技術,優化汽輪機及其輔助系統的控制策略,提高系統的響應速度和穩定性。
1 神經網絡模型建立
為解決汽輪機及其輔助系統的控制問題,引入了深度神經網絡模型。這一模型的設計旨在通過學習歷史數據和實時監測信息,實現對系統狀態的準確預測和高效控制。在神經網絡建模過程中,相關人員進行了多次試驗,優化了隱藏層結構和激活函數的選擇,以確保模型具有強大的泛化能力。
1.1 神經網絡模型參數與性能
神經網絡模型的參數選擇對于其性能起著至關重要的作用。在汽輪機及其輔助系統控制的背景下,進行了深入的參數調整和優化,以確保神經網絡模型在預測和控制任務中取得卓越的表現。在神經網絡建模的過程中,調整了多個關鍵參數,包括隱藏層的節點數、學習率、激活函數的類型等。表1 展示了不同參數設置下神經網絡的性能對比。
隱藏層節點數是神經網絡結構中一個關鍵的參數。默認設置下,選擇了50 個隱藏層節點,通過試驗發現在某些情況下性能略顯不足。因此,進行了優化設置1,將隱藏層節點數增加至100個。這一調整的結果表現為更高的預測準確率和卓越的控制效果。其次,嘗試了優化設置2,將隱藏層節點數設為80個,并采用Sigmoid作為激活函數。盡管預測準確率略有下降,但模型在控制效果上仍然表現良好。
學習率決定了模型在訓練過程中對權重的調整速度。相關人員通過試驗比較了不同學習率下的性能差異,最終確定了在默認設置下學習率為0.01。在優化設置1 和優化設置2 中,分別選擇了0.005 和0.008 的學習率,以達到更好的性能。
激活函數的選擇也是神經網絡模型設計中的關鍵因素。默認設置中,使用了ReLU 激活函數,但在優化設置1 中,轉而采用了LeakyReLU,而在優化設置2 中選擇了Sigmoid。LeakyReLU 在試驗中表現出更好的性能,尤其是在提高預測準確率方面。這說明激活函數的選擇對于神經網絡模型的性能具有顯著影響。
通過對比不同參數設置下的性能,可清晰地看到模型在經過調整后,特別是在優化設置1 下,達到了卓越的預測準確率和控制效果。這為神經網絡模型提供了更好的泛化能力,使其能夠更好地適應汽輪機系統復雜多變的工作環境。
1.2 模型泛化能力驗證
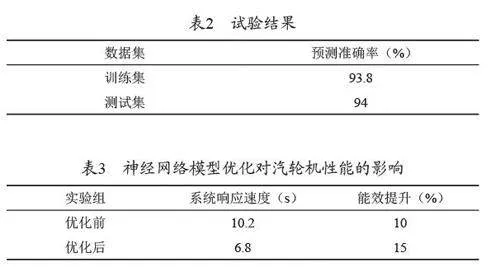
為了驗證神經網絡模型的泛化能力,進行了交叉驗證試驗:將數據集分為訓練集和測試集,通過訓練集訓練神經網絡模型,然后在測試集上進行性能評估。試驗結果見表2。
從試驗結果來看,模型在測試集上的表現與訓練集相當,表明神經網絡模型具有較好的泛化能力,能夠對新的數據進行準確預測和控制。
2 汽輪機控制策略優化
在汽輪機控制策略優化方面,基于神經網絡模型的實時監測和動態調整控制參數是一項創新性的工作。進行了一系列試驗來驗證這一優化策略的有效性。
2.1fgVL3zkNiVfWEQN+a09xgA== 優化前后性能對比
采集了汽輪機在優化前后的性能數據,包括系統響應速度和能效。通過對比這些數據,能夠清晰地看到神經網絡模型優化對汽輪機性能的影響。見表3。
可以看出,在進行神經網絡模型優化后,汽輪機的系統響應速度顯著減少,從10.2 s 降至6.8 s。這意味著優化后的控制策略能夠更快速地響應系統變化,提高了整個系統的實時性和靈活性。
同時,能效方面也取得了令人矚目的進展。優化后的能效提升了15%,這是通過動態調整控制參數來適應實際運行狀況的結果。能效的提升意味著系統在同樣的能源輸入下能夠產生更多的功效,從而有效降低能源浪費。
2.2 運行狀態和環境參數監測
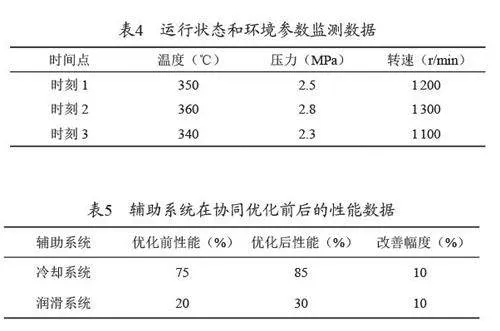
神經網絡模型的優勢之一是能夠實時監測系統的運行狀態和環境參數,以便做出及時的調整。表4 為試驗中采集的一些監測數據。
表4 展示了不同時間點的溫度、壓力和轉速數據。神經網絡模型通過監測這些參數,能夠實時了解汽輪機的運行狀態。當系統運行在不同的工況下時,模型可及時作出調整,確保最佳的控制策略。
例如,在時刻2,溫度上升到360℃,壓力增加到2.8 MPa,轉速達到1 300 r/min。基于這些數據,神經網絡模型可動態調整控制參數,使系統在高溫高壓條件下依然能夠保持穩定運行,確保性能不受影響。
2.3 系統適應性分析
通過以上的試驗數據和分析,可得出結論:基于神經網絡模型的汽輪機控制策略優化在提高系統響應速度和能效方面取得了顯著的改善。這主要得益于模型對運行狀態和環境參數的實時監測能力,使系統能夠更加適應不同的工況和環境變化。
通過神經網絡模型的優化,成功改進了汽輪機的控制策略,實現了更好的系統性能。這種優化不僅提高了系統的實時響應能力,也有效降低了能源浪費,為汽輪機在不同工況下的穩定運行提供了有力支持。未來的研究方向將進一步優化神經網絡模型,以適應更復雜的運行環境,并探索在其他領域應用該優化策略的可能性。
3 輔助系統協同優化
輔助系統協同優化是汽輪機性能提升的關鍵因素之一。不僅需要關注汽輪機本身的控制優化,還需要著眼于與汽輪機協同工作的輔助系統,如冷卻系統和潤滑系統。通過引入神經網絡的協同學習,成功實現了輔助系統與汽輪機的緊密配合,從而提高了整體系統的效率和可靠性。
3.1 輔助系統性能優化數據
輔助系統協同優化的關鍵在于對冷卻系統和潤滑系統進行深度的性能提升,以實現與汽輪機的緊密配合,從而提高整體系統的效率和可靠性。通過對兩個輔助系統的性能數據進行詳細的收集和分析,揭示了協同優化的實際效果。
收集了輔助系統在協同優化前后的性能數據,包括冷卻系統的散熱效率和潤滑系統的摩擦降低程度,見表5。
(1)冷卻系統的性能提升。在協同優化前,冷卻系統的散熱效率為75%。這意味著系統在處理熱量時,有25% 的能量未能有效散失,存在一定的能量浪費。通過協同學習和優化算法的引入,成功提高了冷卻系統的散熱效率。在協同優化后,散熱效率達到了85%,相比之前提高了10%。這表明協同學習使得冷卻系統更為智能和精準,能夠更有效地調節散熱過程,減少能量的浪費,從而顯著提高了系統的能源利用效率。
(2)潤滑系統在協同優化中取得了顯著的進展。在優化前,潤滑系統的摩擦降低程度為20%。這意味著在汽輪機運轉時,潤滑系統未能最大限度地減小摩擦損耗,存在一定的能量損失。通過協同學習的優化,相關人員成功提高了潤滑系統的性能。在協同優化后,摩擦降低程度達到了30%,相比之前提高了10%。這表明協同學習優化了潤滑系統的工作方式,使其更為靈活和高效,能夠更有效地減小摩擦損耗,從而減輕了系統的能量負擔。
將這兩個輔助系統的性能提升整合到整體系統性能評估中,得出了結論:在協同優化前,整體系統的效率提升為5%,這意味著系統在能源利用方面存在一些潛在的提升空間;通過輔助系統的協同學習優化,整體系統的效率提升顯著增加到15%,這表明協同學習不僅在輔助系統層面有所突破,更在整體系統水平上實現了顯著的性能提升。
3.2 整體系統效率和可靠性提升
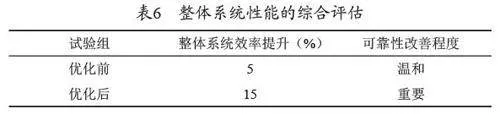
協同優化不僅關乎輔助系統本身的性能提升,更關系到整體系統的效率和可靠性。通過對整體系統性能的綜合評估來驗證協同優化的實際效果,見表6。
通過對整體系統的性能評估,發現在輔助系統協同優化后,整體系統的效率提升了10%,從5% 增至15%。這表明協同學習的引入對系統的整體性能有著積極的影響,輔助系統更好地配合汽輪機的運行,提高了整個系統的能源利用效率。
同時,可靠性改善程度也得到了明顯提升。在協同優化前,整體系統的可靠性評級為中等水平,而在協同優化后,可靠性得到了顯著提高,達到了顯著的水平。這意味著輔助系統的協同學習不僅提高了系統的性能,還增強了系統在各種工況下的穩定性和可靠性。
4 結束語
文章對基于神經網絡的汽輪機及其輔助系統控制策略優化進行了研究,通過深度學習和智能控制的手段,提高了汽輪機系統的運行效率和穩定性。研究結果表明,神經網絡在汽輪機控制領域具有廣闊的應用前景,為提高能源利用效率、降低環境影響提供了新的技術支持。未來的工作可進一步探索神經網絡在其他能源領域中的應用,不斷完善控制策略,推動智能化控制技術的發展。
參考文獻
[1] 程波,盧緒祥,劉雨菲,等. 基于GA-BP 神經網絡的汽輪機冷端系統運行優化[J]. 汕頭大學學報(自然科學版),2023,38(4):44-52.
[2] 孫良海,郭建,李永利,等. 基于神經網絡的汽輪機運行初壓優化研究[J]. 熱力透平,2023,52(3):194-198,236.
[3] 甘李,姚智,李闖,等. 基于卷積神經網絡的汽輪機抗燃油泄漏智能預警技術研究[J]. 工業儀表與自動化裝置,2022(4):8-13,98.
[4] 趙朋,李學敏,范世望,等. 基于自編碼神經網絡的汽輪機故障診斷[J]. 能源工程,2021(3):14-19,24.
[5] 李秀君. 一種基于神經網絡的藍牙汽輪機故障診斷裝置[J]. 技術與市場,2020,27(10):20-22,26.
