基于無人機多光譜的全周期棗樹葉片SPAD值檢測
2024-10-09 00:00:00洪國軍謝俊博張靈付仙兵張煜暉馮意喻彩麗
江蘇農業科學 2024年16期

摘要:針對新疆阿拉爾墾區棗樹葉片SPAD值的實地測量存在難度大、無法快速準確預測的問題,以不同生育期的棗樹葉片為研究對象,利用無人機多光譜影像作為數據源,通過整合多種植被指數,構建了高維數據集并進行特征優選,以確定最優多變量組合。還定量評估了3種機器學習算法[K近鄰模型(KNN)、隨機森林模型(RF)和XGBoost模型]在單變量與多變量條件下對不同棗樹生育期樹葉SPAD值預測能力。結果顯示:(1)棗樹葉片的SPAD值在不同生育期間存在明顯差異,整體上呈現出先增大后減小的趨勢,其中坐果期為轉折點;(2)SPAD值與光譜指數的相關性分析以及特征優選,確定各生育期的最佳光譜指數和最佳特征多變量;(3)XGBoost模型在所有生育階段的預測效果均優于KNN和RF模型。在盛花期,結合了NDVI、GRNDVI、DVI和SAVI特征的XGBoost模型表現最佳,R2=0.949 5 最大與RMSE=0.086 4最小。研究結果表明,結合XGBoost模型和無人機多光譜數據的最優多變量組合,能夠最準確地預測棗樹葉片的SPAD值,特別是在盛花期模型的預測效果最為顯著。利用本研究方法可以實現對新疆阿拉爾墾區棗樹葉片SPAD值的精準監測,可為墾區棗樹生長監測提供有效與及時的技術參考。
關鍵詞:棗樹;SPAD值;生育期;光譜指數;特征優選;XGBoost模型
中圖分類號:S665.101;S127 文獻標志碼:A
文章編號:1002-1302(2024)16-0221-09
棗樹是新疆大規模種植的優勢經濟作物,其生長狀態影響著棗的品質和產值。葉綠素含量與植物的光合作用緊密相連,并作為評估綠色植物生產能力的核心標準[1]。與此同時,葉綠素含量與植物的氮含量密切相關,因此可以作為農田施肥管理的參考標準[2]。正確評估棗樹葉片的葉綠素含量不僅可以揭示其生長和營養狀態,還可為田間決策提供科學依據。
傳統的作物葉綠素測量方法主要基于破壞性的化學分析[3-4]。這種傳統的檢測方法雖然準確,但存在操作耗時、工作繁瑣的問題,難以在大面積范圍內有效監測葉綠素含量[5]。近年來,隨著無人機遙感平臺和傳感器的小型輕量化發展,它們變得更加靈活、成本更低,成為新一代農業監測工具[6]。無人機遙感平臺的實時遙感數據獲取成為業內備受關注的研究焦點,并且得到了迅速發展[7]。黃夢婷等使用大疆精靈4多光譜無人機拍攝了水稻在拔節孕穗期和抽穗開花期與乳熟期的冠層多光譜遙感影像,通過無人機多光譜遙感技術反演對水稻SPAD值進行了研究[8]。Zhai等通過將多源傳感器數據與SPAD值(MS+TIR+SPD)相結合來獲得最佳結果,R2為0.685~0.872[9]。從拔節期到大喇叭階段,估計精度有所提高,后者的精度最高(R2范圍為0.721~0.901)。CatBoost始終優于其他算法,提供了準確可靠的玉米AGB估計。Zha等評估了包括隨機森林(RF)在內的機器學習方法,用于估算東北地區水稻莖伸長期(SE)和抽穗期(HD)的地上生物量(AGB)、植物氮吸收(PNU)和氮營養指數(NNI),RF優于其他方法,實現了高R2(SE為0.94,HD為0.96)和低均方根誤差[10]。Yin等研究表明,特征選擇方法和機器學習算法的最佳組合可以更準確地估計冬小麥SPAD值[11]。李成等利用蘋果樹冠層的紅邊和近紅外波段建立植被指數,可以更準確、更穩定地估算蘋果樹的葉綠素含量[12]。
然而,植被生理參數的估算容易受到植被類型、研究區域等外部環境因素的影響。棗樹是一種人工干預較多的經濟樹種,其種植結構和模式與普通作物存在顯著差異,例如棗樹冠層結構和水肥分布不均勻。因此,前人使用無人機多光譜數據得出的關于水稻、玉米、冬小麥等特定作物的結論未必適用于棗樹,需要進一步研究無人機多光譜數據是否能夠準確估算棗樹葉片SPAD值。此外,現有的研究主要采用單一的光譜指數來構建估算模型,這導致了模型精度的限制。
本研究利用無人機多光譜影像數據,結合了KNN、RF和XGBoost 3種機器學習模型,對棗樹不同生育期葉片的SPAD值進行了綜合檢測。研究中不僅提取了單變量和多變量光譜指數,還結合實地采集的樣本數據,構建了基于無人機多光譜數據的SPAD值檢測模型。通過對比不同模型的檢測效果,旨在確定最適合棗樹葉片SPAD值檢測的優化模型,以期為精準農業提供科學支持和技術參考。
1 材料與方法
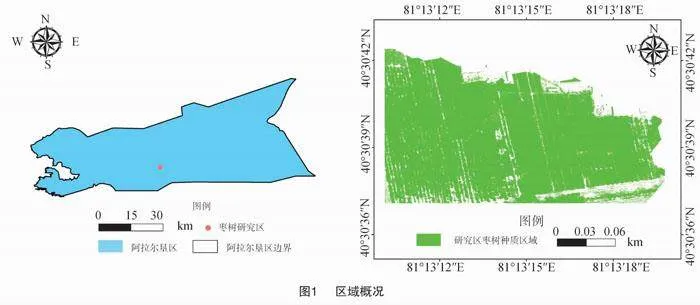
1.1 研究區概況
研究區位于新疆阿拉爾墾區12團1連的典型棗樹種植區(地理位置40°30′39″N,81°13′14″E),研究區屬于溫帶大陸性干旱荒漠氣候,是典型的荒漠綠洲灌溉農業區[13](圖1)。年均降水稀少,年均降水量為40.1~82.5 mm,年均蒸發量為1 876.6~2 558.9 mm,其蒸發量遠遠大于降水量。研究區熱量豐富,光照充足,溫差較大,光照條件好,適宜喜溫植物生長。墾區12團1連主要種植棗類為灰棗,也種植了部分駿棗,優質的自然環境為棗樹的生長提供了良好的環境。
1.2 野外采樣與SPAD值測量
根據棗樹生育期,研究小組分別于2023年5月9日、6月9日、6月25日、7月30日、8月25日、9月29日進行了6次實地樣本采集,分別對應棗樹葉片光譜較為明顯的展葉期、初花期、盛花期、坐果期、膨大期、成熟期。在研究區選擇具有代表性的102個樣本點,利用華測S8測定GPS記錄每個樣本點的經緯度坐標。對于所測量的棗樹,分別從每棵棗樹取長勢較好的10張葉子,利用日本SPAD-502手持葉綠素儀測量每片葉子的SPAD值,避開葉片的葉柄和葉尖區域,共測量5次,取該樣本點所有葉片平均值作為樣本點的SPAD值。最終,6個生育期均獲得102組SPAD值數據。
1.3 影像數據獲取與預處理
使用大疆精靈4四旋翼無人機作為飛行平臺,本研究所選取的無人機搭載了6個1/2.9英寸CMOS,包括1個用于可見光成像的彩色傳感器和5個用于多光譜成像的單色傳感器,其中單個傳感器的有效像素208萬(總像素212萬),5個多光譜波段分別為藍光(450 nm±16 nm)、綠光(560 nm±16 nm)、紅光(650 nm±16 nm)、紅邊光(730 nm±16 nm)、近紅外光(840 nm±26 nm),以獲得棗樹全周期階段的多光譜圖像。試驗在晴朗無云天氣 14:00 進行,此時陽光強度穩定,棗樹陰影較小。飛行高度為60 m,重疊率和航向重疊率分別為65%和75%。將無人機拍攝的多張圖片通過大疆智圖軟件進行多任務拼接合成。將拼接完成的圖像使用ENVI5.3(64-bit)進行后續的輻射校正和波段合成。
1.4 棗樹生育期光譜指數與特征優化研究
1.4.1 棗樹SPAD值與光譜指數關系探索
光譜指數能有效反映植被生長狀況,是進行植被生理參數建模的重要變量。在前人研究的基礎上,選取了10種與植被葉綠素含量密切相關的典型植被指數,包括歸一化植被指數(NDVI)[14-15]、比值植被指數(RVI)[16]、差值環境植被指數(DVI)[17]、綠度歸一化植被指數(GNDVI)[18]、優化土壤調解植被指數(OSAVI)[19]、土壤調解植被指數(SAVI)[20]、綠-紅波段歸一化差值植被指數(GRNDVI)[21]、鹽分指數1(SI1)[22]、修改型土壤調節植被指數(MSAVI)[23]、三角形植被指數(TVI)[24]。為準確獲取對SPAD值最為敏感的光譜指數,將每個生育期構建的光譜指數與SPAD值進行相關性分析,再將每個生育期構建的光譜指數隨機組合構建棗樹SPAD值高維數據集,以分析組合光譜指數與單變量光譜指數對于棗樹各生育期SPAD值預測優劣。
1.4.2 優化特征選擇與評估策略研究
本研究旨在解決初始數據中特征眾多、高度線性相關和存在冗余特征的問題。目的是從中篩選出既包含大量有效信息又具有最優性能的特征組合。為實現此目的,首先采用了樹模型來評估所有特征,以便通過特征重要性評分淘汰掉得分低的非核心特征。接下來,使用窮舉法對剩余特征進行組合并結合五折交叉驗證來評估每個特征組合的性能。在交叉驗證階段,選擇了樹模型,因為它不僅能夠處理特征之間的線性關系,還能夠處理非線性關系。基于每個特征組合的驗證集評分均值進行排序后,最終選取了在棗樹各生育期無人機多光譜遙感影像中評分均值最高的特征組合作為最優特征多變量。
1.5 反演模型構建與驗證
本研究基于棗樹6個生育期,篩選出的3種最優光譜指數與3組最優多變量。把對應的地面實測點的光譜像元值被提取作為自變量,而野外實測的棗樹葉片SPAD值則作為因變量。將構成的樣本數據集,通過Python中 train_test_split函數劃分 70%(n=71)的樣本作為建模集,30%(n=31)的樣本作為驗證集,利用K近鄰模型(k-nearest neighbor,KNN)[25]、隨機森林模型(random forest,RF)[26]和XGBoost[27-28]模型預測棗樹葉片SPAD值。評估這些模型的預測棗樹SPAD值的性能,采用決定系數 (coefficient of determination,R2)和均方根(root mean square error,RMSE)作為評價指標。
2 結果與分析
2.1 棗樹全周期葉片SPAD值變化特征
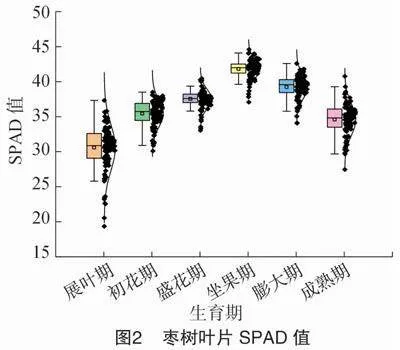
棗樹展葉期、初花期、盛花期、坐果期、膨大期和成熟期選取的 102個樣本實測 SPAD 值統計特征見圖2。整個生育期中,棗樹葉片的SPAD值變化范圍為19.35~44.60。不同生育期間的SPAD值存在明顯差異。隨著生育進程的推進,SPAD值呈先增大后減小的趨勢,以坐果期為轉折點。其中,從展葉期到成熟期的變化幅度最為顯著。
從展葉期到成熟期,棗樹葉片的結構和形狀經歷了明顯的變化,這直接影響了不同生育期的SPAD值特征。在生育的前期,為了滿足植物生長需求,葉片主要依靠光合作用來積累營養物質,此時的SPAD值相對較低。隨著生長進程的發展,葉片逐漸趨向成熟和穩定,SPAD值逐步上升,并在坐果期達到峰值。但是,從坐果期開始到成熟期,隨著營養物質逐步向果實的轉移,葉片開始逐漸老化和凋落,葉綠素也隨之分解,從而使SPAD值顯示下降的趨勢。展葉期、初花期、盛花期、坐果期、膨大期和成熟期的 SPAD 值變異系數分別為11.24%、4.91%、3.32%、3.02%、4.28%和6.16%,變異系數介于3.02%~11.24%之間,變異性較弱。
2.2 光譜指數與SPAD值的相關性分析與最優特征選擇
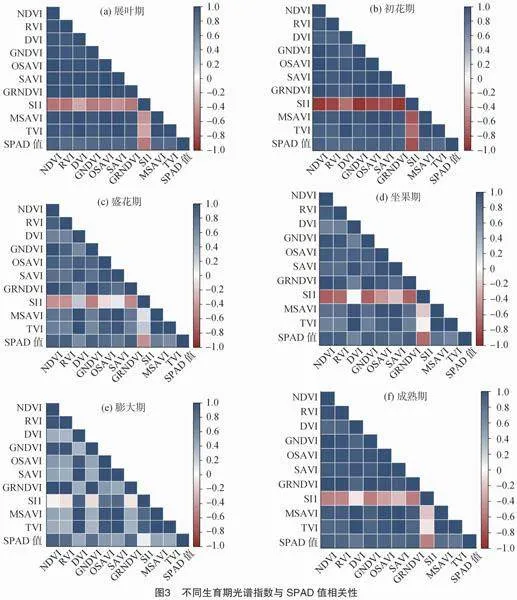
6個生育期構建的光譜指數與SPAD值的相關系數矩陣見圖3,紅色到紫色表示低到高的相關性。不同生育期光譜指數與實測SPAD值都呈現出很高的相關性。同時,各個生育期棗樹葉片的SPAD值對光譜指數的敏感度各不相同。
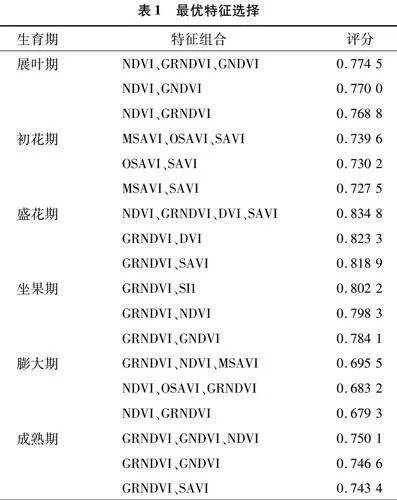
利用優化特征選擇與評估策略研究,對不同生育期的光譜指數組合及其對應的SPAD值實測值進行了詳細分析。在分析后,選擇了在不同生育期無人機數據遙感影像中評分均值最高的前3個特征組合作為最優多變量,具體結果見表1。
為了估算后期的棗樹葉片SPAD值,選擇了每個生育期相關系數排名前3的光譜指數,以及上述的[CM(21]最優特征多變量。通過對比單指數與最優特征多變量訓練模型的評價指標(R2和RMSE),從中選取了性能最佳的模型來預測各個生育期的棗樹葉片SPAD值。
2.3 棗樹葉片SPAD值預測模型的構建及特征選擇分析
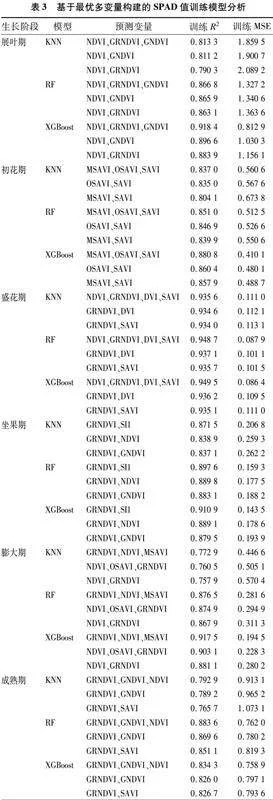
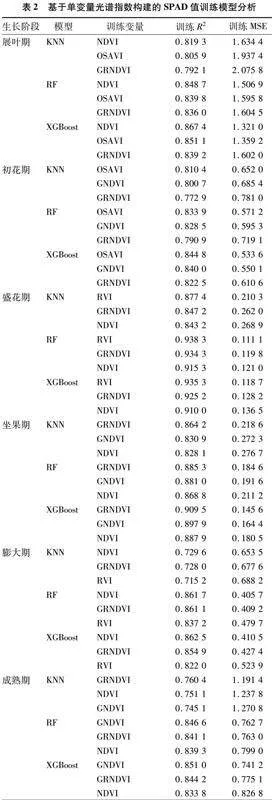
基于對光譜指數與SPAD值相關性分析與最優特征選擇的研究,進一步探討單變量光譜指數和最優多變量光譜指數在預測能力上的區別。在模型構建中,選用KNN、RF和XGBoost 3種預測模型,并對它們在各個生育階段的預測性能進行了綜合分析。模型精度評價指標的詳細信息見表2、表3。
經分析發現,不同生長階段的棗樹葉片SPAD值與不同的光譜指數或最優多變量在預測能力上存在差異。因此,在KNN、RF和XGBoost模型的構建中,選取的單變量光譜指數或最優多變量也有所不同。最優SPAD值訓練模型在展葉期分別為NDVI與組合NDVI、GNDVI、GRNDVI;初花期分別為OSAVI與組合MSAVI、OSAVI、SAVI;盛花期分別為RVI與組合NDVI、GRNDVI、DVI、SAVI;坐果期分別為GRNDVI與組合GRNDVI、SI1;膨大期分別為NDVI與組合GRNDVI、NDVI、MSAVI;成熟期分別為GRNDVI與組合GRNDVI、GNDVI、NDVI。
在同一建模方法下,考慮單變量光譜指數與最優多變量的平均值, 不同生育期的模型精度有所不同。具體來說,基于KNN、RF和XGBoost模型,盛花期的精度均最高,隨后是坐果期、展葉期、成熟期、初花期,而膨大期的精度最低。因此,這3種模型在6個生育期的估算精度順序為盛花期>坐果期>展葉期>成熟期>初花期>膨大期。
對于同一生育期,當考慮單變量光譜指數與最優多變量的平均值,XGBoost模型在所有生育期都表現得比KNN和RF模型好。具體地說,XGBoost模型的驗證平均R2 在各生育期均高于其他2種模型,且它的R2是KNN模型的1.088 1倍,是RF模型的1.068 9倍。此外,XGBoost在各生育期的驗證集中的MSE表現也相對穩定,這表明其具有很好的魯棒性,并且在估算SPAD值方面表現出色。
最后,當在同一生育期內,固定建模方法但更改單變量光譜指數與最優多變量時,不同模型的預測精度也有所不同。整體上,XGBoost模型的表現優于RF,RF又優于KNN。而在各生育期的排名中,盛花期的精度始終是最高的,隨后是坐果期、展葉期、成熟期、初花期,最后是膨大期。
2.4 全周期棗樹葉子SPAD值空間分布
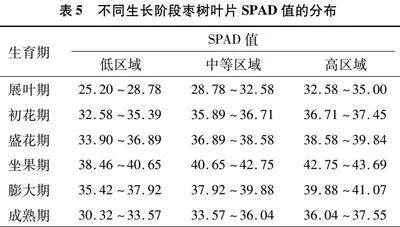
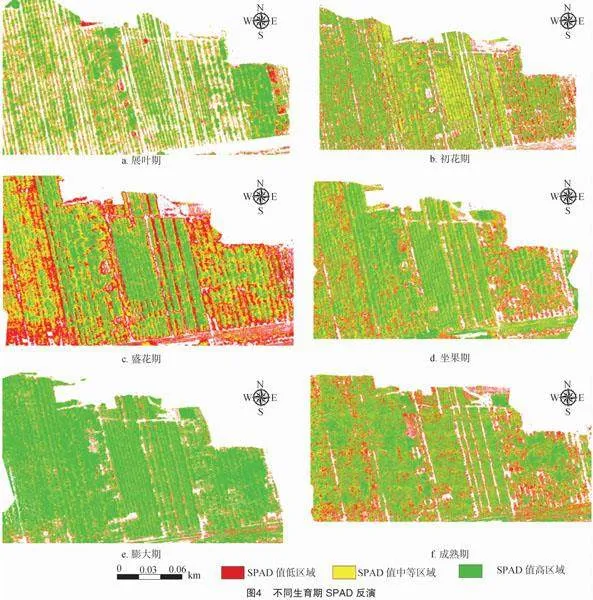
利用XGBoost模型,在無人機多光譜影像的最優特征多變量條件下,進行不同生育期棗樹葉片SPAD值的空間反演研究。采用Jenk自然間斷點分級法,將反演填圖值域區間劃分為3個等級(表5),分別得到6種反演模型的棗樹葉片SPAD值分布(圖4)。
研究區棗樹葉片SPAD值估算范圍如表5所示,不同生育期實地采樣棗樹葉片SPAD值數據統計范圍分別為19.35~35.67、30.10~38.50、33.04~40.44、37.08~44.60、34.08~42.59、27.46~40.77,其中,展葉期與其他生育期相比存在明顯的高估,而其余生育期的估算值與實地采樣值相近。從空間分布(圖4)來看,不同生育期研究區 SPAD值低等區域主要集中在左上角與中部區域,SPAD值中等區域主要分布在中間區域與低等區域相鄰,SPAD值高等區域主要集中在右下角。通過對SPAD值的空間分布進行分析,可以更加深入地了解植物在不同生育期的生長和健康狀況。
3 討論與結論
3.1 棗樹生長周期中的葉綠素變化與SPAD值分析
棗樹在其生長周期中,從展葉期到成熟期,經歷了多個生育階段,每個階段都有其獨特的生理和生化特征。通過SPAD值,可以有效追蹤這些階段中葉綠素含量的變化,因為SPAD值直接反映了葉綠素的相對濃度。因此,準確地獲取作物的SPAD值對于棗樹的生長監測和產量估算至關重要。葉綠素是棗樹進行光合作用的主要色素,其濃度變化可以直接反映光合作用的活躍程度。為了支撐其生長發育,棗樹在早期需要大量的光合作用,這導致葉綠素濃度持續上升。特別是在進行了展葉期后期的追肥之后,營養物質通過棗樹的根莖轉移到葉片,為葉綠素的形成提供了充足的營養,這導致在初花期葉綠素的增長幅度達到最大。隨后,葉綠素濃度在坐果期達到頂峰。但是,隨著果實的成熟,部分營養物質被轉移到果實中,使葉片的功能逐漸減弱,從而導致葉綠素濃度開始下降。
3.2 光譜指數與SPAD值預測相關性探索
光譜指數與棗樹SPAD值之間的關系在遙感監測中起到了核心作用,它們共同為SPAD值的預測提供了堅實的基礎。從前述分析中, 可以明確知道在不同的生育期中,光譜指數與實測的SPAD值之間存在顯著的相關性。然而,這種相關性并不是在每個生育期都保持一致。盡管有10種光譜指數與SPAD值呈現出了強相關性,但在所有生育期中并不是每一種光譜指數都能準確地預測SPAD值。這正凸顯出了特征選擇步驟的重要性,因為某些光譜指數組合在某些生育期的預測效果可能會優于其他組合。在選擇適當的光譜指數和特征多變量后,模型選擇變得尤為重要。通過使用不同的機器學習模型,如KNN、RF和XGBoost,并比較它們的評價指標,確定預測棗樹葉片的SPAD值最優模型。
3.3 棗樹SPAD值預測的關鍵因素與模型選擇
從前面分析中明確,不同生育期的棗樹葉片SPAD值估算可能受光譜指數和特征組合的影響。其中,XGBoost模型在所有生育期的估算中相較KNN和RF都展現出更高的準確性。這可能得益于XGBoost在處理來自無人機影像數據中的噪聲時的優越魯棒性。值得注意的是, 這種噪聲在不同生育期的數據中可能存在差異。此外,本研究所采用的光譜指數和特征多變量都經過了嚴格的篩選,為模型的高準確性提供了基礎。通過這種特征選擇策略,并結合上述的機器學習模型,成功地提高了模型的預測精度并確保其在不同生育期中的普適性。
綜上所述,對于棗樹SPAD值的檢測,正確選擇光譜指數和最優多變量是關鍵。對于棗樹SPAD值的檢測,選擇合適的光譜指數和最優多變量非常關鍵。 而在選擇了這些輸入數據后, XGBoost模型顯然是首選,其高魯棒性和出色的預測精度使其在處理這類問題時表現得尤為出色,為農業遙感領域的研究者提供了有力的工具。
3.4 多因素影響下的棗樹葉片SPAD值差異性分析
在本研究中, 使用集成的機器學習XGBoost模型,對訓練數據和特征的敏感度可能因數據的變化而產生波動。不同生育期的棗樹葉片具有各自獨特的光譜反射特性和生理狀態,這是模型在不同生育期預測結果出現差異的主要原因。此外,每個生育期所對應的最優多變量都可能不同,這也可能導致不同生育期SPAD值的差異化。在考察了模型和光譜特性后,也需要考慮環境因素。研究區使用的漫灌方法在部分區域存在灌水不足和施肥不均的情況,這些都對棗樹的生長產生影響。不同的區域,由于這些外部條件的差異,導致棗樹的生長狀態和健康狀況呈現不同。特別是在展葉期,棗樹葉片的SPAD值出現了高估。此時期葉片還未完全展開,因此受到枝干和土壤光譜反射的影響更為明顯,與其他生育期相比存在較大差異。綜上所述,不同生育期的棗樹葉片SPAD值和其空間分布的差異,可能是模型、光譜特性以及環境因素共同作用的結果。為了更準確地解析這些差異,需要進一步深入研究。
本研究聚焦于棗樹在不同生育期葉片SPAD值的監測,利用無人機多光譜遙感數據源結合多種機器學習模型(KNN、RF和XGBoost),并采用了光譜指數的單變量與多變量分析方法。研究表明,在預測棗樹葉片SPAD值時,結合XGBoost模型的多變量方法比單變量方法更為準確。但是,預測結果并非僅由模型和光譜特性決定。外部環境因素,例如灌溉方式和施肥頻率,以及棗樹在其不同生育階段的光譜反射特性的變化,均有可能對預測準確性產生顯著影響。總體來說,本研究不僅為理解棗樹在整個生長周期中葉片SPAD值的變化提供了重要信息,還為無人機農業遙感應用領域提供了有價值的參考。未來的研究將致力于進一步提高對棗樹生長狀況的精確評估,為實現農業的可持續發展和高效管理提供更加堅實的科學基礎。
參考文獻:
[1]Liu Y,Hatou K J,Aihara T,et al. A robust vegetation index based on different UAV RGB images to estimate SPAD values of naked barley leaves[J]. Remote Sensing,2021,13(4):686.
[2]Clevers J,Kooistra L,van den Brande M. Using sentinel-2 data for retrieving LAI and leaf and canopy chlorophyll content of a potato crop[J]. Remote Sensing,2017,9(5):405.
[3]Qiao L,Tang W J,Gao D H,et al. UAV-based chlorophyll content estimation by evaluating vegetation index responses under different crop coverages[J]. Computers and Electronics in Agriculture,2022,196:106775.
[4]馬 玲,杜明華,孟 露,等. 基于高光譜成像技術的番茄葉片葉綠素含量檢測[J]. 江蘇農業科學,2023,51(11):167-174.
[5]劉一博,裴 杰,方華軍,等. 利用無人機影像反演水稻SPAD值的最優空間窗口確定[J]. 農業工程學報,2023,39(19):165-174.
[6]閆成川,曲延英,陳全家,等. 基于無人機多光譜影像的棉花SPAD值及葉片含水量估測[J]. 農業工程學報,2023,39(2):61-67.
[7]汪 沛,羅錫文,周志艷,等. 基于微小型無人機的遙感信息獲取關鍵技術綜述[J]. 農業工程學報,2014,30(18):1-12.
[8]黃夢婷,張 薇,閆浩迪,等. 基于無人機多光譜遙感的水稻冠層SPAD值反演[J]. 中國農村水利水電,2023(4):182-188.
[9]Zhai W G,Li C C,Fei S P,et al. CatBoost algorithm for estimating maize above-ground biomass using unmanned aerial vehicle-based multi-source sensor data and SPAD values[J]. Computers and Electronics in Agriculture,2023,214:108306.
[10]Zha H N,Miao Y X,Wang T T,et al. Improving unmanned aerial vehicle remote sensing-based rice nitrogen nutrition index prediction with machine learning[J]. Remote Sensing,2020,12(2):215.
[11]Yin Q,Zhang Y T,Li W L,et al. Estimation of winter wheat SPAD values based on UAV multispectral remote sensing[J]. Remote Sensing,2023,15(14):3595.
[12]Li C,Zhu X C,Wei Y,et al. Estimating apple tree canopy chlorophyll content based on Sentinel-2A remote sensing imaging[J]. Scientific Reports,2018,8(1):3756.
[13]Hong G J,Bai T C,Wang X P,et al. Extraction and analysis of soil salinization information in an alar reclamation area based on spectral index modeling[J]. Applied Sciences,2023,13(6):3440.
[14]羅小波,謝天授,董圣賢. 基于無人機多光譜影像的柑橘冠層葉綠素含量反演[J]. 農業機械學報,2023,54(4):198-205.
[15]Huang S,Tang L N,Hupy J P,et al. A commentary review on the use of normalized difference vegetation index (NDVI) in the era of popular remote sensing[J]. Journal of Forestry Research,2021,32(1):1-6.
[16]王鑫梅,張勁松,孟 平,等. 基于無人機遙感影像的核桃冠層氮素含量估算[J]. 農業機械學報,2021,52(2):178-187.
[17]Fei H,Fan Z,Wang C,et al. Cotton classification method at the county scale based on multi-features and Random Forest feature selection algorithm and classifier[J]. Remote Sensing,2022,14(4):829.
[18]梁晨欣,黃啟廳,王 思,等. 基于多時相遙感植被指數的柑橘果園識別[J]. 農業工程學報,2021,37(24):168-176.
[19]Fern R R,Foxley E A,Bruno A,et al. Suitability of NDVI and OSAVI as estimators of green biomass and coverage in a semi-arid rangeland[J]. Ecological Indicators,2018,94:16-21.
[20]徐 燦,胡笑濤,陳滇豫,等. 基于無人機多光譜遙感估算西北半濕潤區葡萄基礎作物系數研究[J]. 干旱地區農業研究,2023,41(4):106-117.
[21]Zhang X W,Liu R Y,Gan F P,et al. Evaluation of spatial-temporal variation of vegetation restoration in Dexing copper mine area using remote sensing data[C]//IGARSS 2020-2020 IEEE International Geoscience and Remote Sensing Symposium.IEEE,2020:2013-2016.
[22]Ibrahim M. Modeling soil salinity and mapping using spectral remote sensing data in the arid and semi-arid region[J]. International Journal of Remote Sensing Applications,2016,6:76.
[23]張添佑,王 玲,曾攀麗,等. 基于MSAVI-SI特征空間的瑪納斯河流域灌區土壤鹽漬化研究[J]. 干旱區研究,2016,33(3):499-505.
[24]Broge N H,Leblanc E. Comparing prediction power and stability of broadband and hyperspectral vegetation indices for estimation of green leaf area index and canopy chlorophyll density[J]. Remote Sensing of Environment,2001,76(2):156-172.
[25]Martínez-Clark R,Pliego-Jimenez J,Flores-Resendiz J F,et al. Optimum k-nearest neighbors for heading synchronization on a swarm of UAVs under a time-evolving communication network[J]. Entropy,2023,25(6):853.
[26]Zhu C M,Ding J L,Zhang Z P,et al. Exploring the potential of UAV hyperspectral image for estimating soil salinity:effects of optimal band combination algorithm and random forest[J]. Spectrochimica Acta(Part A:Molecular and Biomolecular Spectroscopy),2022,279:121416.
[27]Yu J W,Yoon Y W,Baek W K,et al. Forest vertical structure mapping using two-seasonal optic images and LiDAR DSM acquired from UAV platform through random forest,XGBoost,and support vector machine approaches[J]. Remote Sensing,2021,13(21):4282.
[28]Jiang P G,Zhou X L,Liu T L,et al. Prediction dynamics in cotton aphid using unmanned aerial vehicle multispectral images and vegetation indices[J]. IEEE Access,2023,11:5908-5918.
基金項目:國家自然科學基金(編號:42061046)。
作者簡介:洪國軍(1995—),男,江西樂平人,碩士研究生,研究方向為農業信息化。E-mail:hgj950603@163.com。
通信作者:喻彩麗,碩士,講師,研究方向為農業信息化。E-mail:purejade@163.com。