基于相差變化率的GSM-R干擾源直接定位技術(shù)
2024-08-23 00:00:00李潤雷孟景輝樊濤酒昀洋
無線電工程 2024年7期





摘 要:移動通信運營商在鐵路沿線部署了公眾移動通信網(wǎng)絡(luò),采用的數(shù)字全球通信系統(tǒng)(Global System of MobileCommunication,GSM) 原理和制式與鐵路全球移動通信系統(tǒng)(Global System of Mobile Communication for Railways,GSM-R)完全相同,對GSM-R 造成了一定干擾。為了對這些干擾源進行定位,提出了一種基于相差變化率的干擾源定位技術(shù)。該技術(shù)基于二元陣列接收系統(tǒng),根據(jù)陣元與干擾源之間的時空關(guān)系,初始以方位角的變化率與干擾源位置建立關(guān)系模型,借助微分變形建立了以相差變化率為自變量的干擾源位置求解模型和解算方法。為了避免采集數(shù)據(jù)中的異常樣本對最終的定位結(jié)果產(chǎn)生影響,設(shè)計了一種基于孤立森林的異常樣本過濾算法,利用數(shù)據(jù)點自身的特征屬性構(gòu)建多維特征空間實現(xiàn)異常數(shù)據(jù)點的檢測和消除。搭建實景環(huán)境對鐵路沿線無線電數(shù)據(jù)進行采集并開展數(shù)據(jù)分析工作,結(jié)果表明所提基于孤立森林的異常樣本過濾算法能夠有效剔除異常數(shù)據(jù),提高整體樣本的質(zhì)量。使用相同的已知位置干擾源無線采集數(shù)據(jù)開展與基于頻差變化率的定位方法和基于振幅變化率的定位方法的定位能力對比試驗,統(tǒng)計不同方法對于每個干擾源的最小定位誤差,結(jié)果表明基于頻差和振幅變化率定位方法的平均定位誤差分別是所提方法的7. 18、20. 73 倍,證明了所提方法的定位精度顯著優(yōu)于基于頻差變化率的定位方法和基于振幅變化率的定位方法,具有較高的定位精度。
關(guān)鍵詞:相差變化率;干擾源定位;陣列天線;鐵路全球移動通信系統(tǒng);孤立森林
中圖分類號:TN97 文獻標志碼:A 開放科學(xué)(資源服務(wù))標識碼(OSID):
文章編號:1003-3106(2024)07-1712-09
0 引言
鐵路全球移動通信系統(tǒng)(Global System ofMobile Communication for Railways,GSM-R)是為滿足鐵路應(yīng)用而開發(fā)的專用數(shù)字式無線通信系統(tǒng),主要為無線列調(diào)、編組調(diào)車通信和應(yīng)急語音通話等提供通信服務(wù),為列車自動控制與信息檢測提供數(shù)據(jù)傳輸通道[1]。由于部分移動通信運營商在鐵路沿線GSM-R 鄰近頻段部署了2G、4G 等公眾移動通信網(wǎng)絡(luò),不可避免地對鐵路專用無線通信系統(tǒng)造成干擾[2]。當GSM-R 的通信受到干擾時,會增加數(shù)據(jù)傳輸過程中的誤碼率,對列車的正常運行和安全等方面造成極大影響[3-4]。為保證GSMR 的正常工作,有必要對鐵路沿線干擾信號進行排查,為此首先應(yīng)對干擾源實現(xiàn)精準定位。
GSM-R 干擾源定位屬于無源定位問題,主要解決方案有兩步定位法和直接定位法[5]。兩步定位法是一種傳統(tǒng)的無源定位方法,與之相比,直接定位方法充分利用了來波信號來自同一輻射源的先驗知識,將參數(shù)估計與定位解算2 個步驟結(jié)合到了一個定位模型中,構(gòu)建僅與輻射源位置相關(guān)的代價函數(shù)實現(xiàn)定位,減少了信息傳遞過程中的不必要損失[6]。運動平臺無源定位較多基于角度變化率實現(xiàn)[7],但角度測量需要干涉儀等測角工具才能實現(xiàn),一般測角時存在誤差較大的問題。文獻[8]使用數(shù)字濾波對角度數(shù)據(jù)流進行進一步處理,文獻[9]簡化了角度變化率的直接測距條件,均優(yōu)化了角度變化率的測量方法。在儀器精度日益增加、測量方法深入優(yōu)化的前提下[10],得到更高精度的角度數(shù)據(jù)序列具有可實現(xiàn)性,推動直接定位精確性的持續(xù)發(fā)展。
除了角度變化率,文獻[11]提出了基于振幅頻譜的運動平臺無源定位方法,利用數(shù)值計算得到雷電電磁場波形,定量評估了振幅頻譜法適用的探測范圍及定位精度。為增加角度測量可靠性,文獻[12]基于角度變化率與多普勒頻差之間的關(guān)系,提出了一種機載單基線多普勒測距方法,將前置角的正弦變化率引入多普勒頻移方程,借助于微分變形所產(chǎn)生的角速度參量能夠獲得被測目標的距離。文獻[13-14]研究了相位差變化率單站無源定位算法,提出了基于相位差變化率的無源定位方法,具有機動性能好、定位收斂快和定位誤差低等優(yōu)點。為減少采集數(shù)據(jù)中的異常樣本,文獻[15 -16]提出了幅值去噪方法,其中文獻[15]借鑒圖像處理中的空間濾波方法進行振幅去噪,文獻[16]采用傳統(tǒng)的三分濾波拓撲結(jié)構(gòu),實現(xiàn)了可重構(gòu)的振幅濾波效應(yīng)。文獻[17-18]提出了頻域去噪方法,其中文獻[17]提出了一種利用主星干涉儀測向信息的改進迭代擴展卡爾曼濾波進行頻域濾波,文獻[18]提出了一種循環(huán)卷積懲罰因子,在不進行頻域變換的情況下實現(xiàn)頻率約束,通過設(shè)計有限響應(yīng)濾波器實現(xiàn)頻域去噪。文獻[19-20]提出了相差去噪方法,其中文獻[19]提出了基于異相差分濾波器的航空相機焦面檢測方法,文獻[20]提出了一種新的相位質(zhì)量導(dǎo)向的相位展開(Phase Unwrapping,PU)集成過濾和展開方法,采用中心差分信息濾波器實現(xiàn)了PU 過程中解包裹相位的動態(tài)估計,取得了抗噪聲能力。上述研究分別在振幅、頻率和相位方面取得了較好的數(shù)據(jù)預(yù)處理效果。綜上,現(xiàn)有GSM-R 干擾源定位研究多基于信號參數(shù)變化率的測量,但多為兩步定位法,且未綜合利用信號所包含的有用信息。
基于以上分析,同時考慮到現(xiàn)實場景中的GSM-R 干擾源信號一般在高速列車上采集,列車震動等導(dǎo)致所采集信號樣本有概率無法利用,本文基于相位差變化率與角度變化率之間的關(guān)系建立干擾源目標的位置求解模型,提出了一種基于相差變化率的GSM-R 干擾源直接定位技術(shù)。為了避免采集數(shù)據(jù)中的異常樣本對最終的定位計算造成影響,提出了基于孤立森林的異常樣本過濾算法,使用預(yù)處理后的數(shù)據(jù)驗證所提定位技術(shù)的有效性。
1 場景描述及問題建模
3. 2 孤立森林相關(guān)定義
孤立森林中一個較為重要的概念是孤立樹,其定義如下。
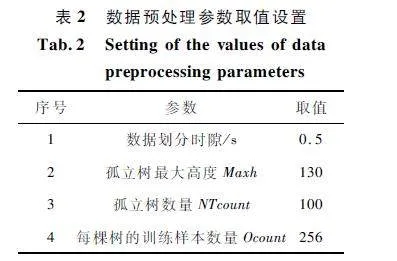
定義一 孤立樹,一種二叉樹,共存在2 類節(jié)點分別是外部節(jié)點和內(nèi)部節(jié)點。外部節(jié)點是其葉子節(jié)點,沒有任何子樹;內(nèi)部節(jié)點標記為test,存在左右2 棵子樹分別記為Tl 和Tr,test 還包含一個屬性p 和分割點s,樣本數(shù)據(jù)di(k,j)進入test 節(jié)點,假設(shè)p(·)為屬性值計算函數(shù),則根據(jù)式(16)將di(k,j)劃分到test 的子樹中:
定義二 樣本數(shù)據(jù)點在孤立樹中的高度h(di(k,j)):樣本數(shù)據(jù)點di(k,j)從孤立樹的根節(jié)點到葉子節(jié)點經(jīng)過的邊的數(shù)量。
孤立樹范例如圖2 所示。
根據(jù)定義二,各樣本點在孤立樹中的高度分別為2、3、1 和4。樣本點在孤立樹中高度越小越有可能是異常樣本,因為具有高相似度的正常樣本群體相較異常樣本更難被特征屬性分離,可以通過該特性實現(xiàn)異常樣本檢測[24-26]。
3. 3 基于孤立森林的異常樣本過濾
多棵相互獨立的孤立樹組成孤立森林,假設(shè)NTcount 個孤立樹組成一個孤立森林,表示為iForest= {iT1 ,iT2 ,…,iTNTcount},則對于每一個樣本數(shù)據(jù)點di(k,j),通過遍歷每棵樹,可以計算在森林中的平均高度avgh(di(k,j))。進一步對同一數(shù)據(jù)段Dik 內(nèi)的所有點的平均高度做歸一化處理,每個樣本數(shù)據(jù)點的異常值分數(shù)如式(17)所示:
Os(di(k,j)) = 2 -Nor(avgh(di(k,j)))/M , (17)
式中:Nor(·)表示歸一化處理,M 表示固定常數(shù),一般取所有樣本的平均高度。Os(di(k,j))的取值[0,1],值越接近1 表示異常樣本的可能性更高,越接近0 表示正常樣本的可能性更高。
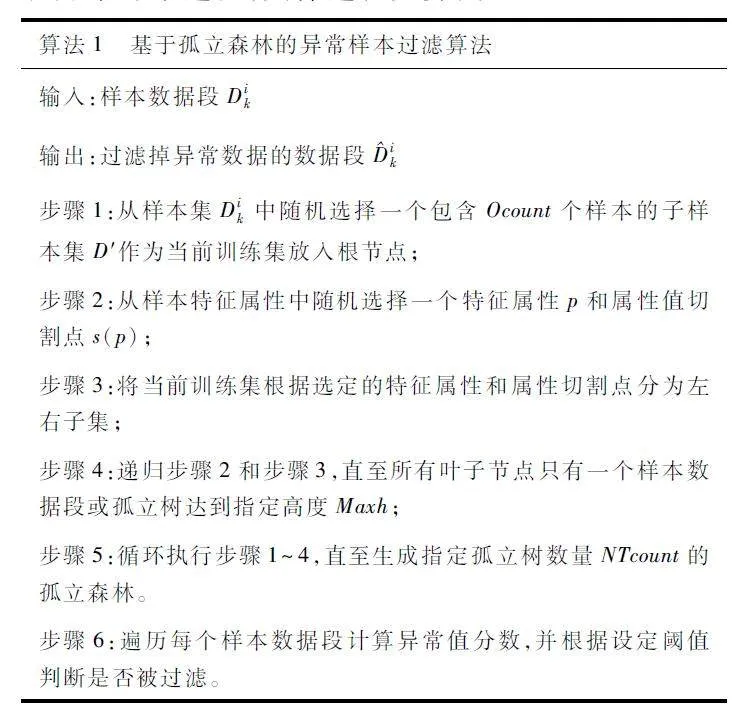
針對采集的樣本數(shù)據(jù)使用孤立森林實現(xiàn)異常樣本過濾共分兩階段開展:第一階段完成孤立森林的構(gòu)建,第二階段計算異常值分數(shù)并根據(jù)設(shè)定閾值實現(xiàn)異常樣本過濾,具體過程如算法1 所示。
算法1 中步驟1~ 5 實現(xiàn)了孤立森林的創(chuàng)建,步驟6 實現(xiàn)了異常樣本過濾。其中Ocount、Th (p)、Maxh 等未知變量在具體實現(xiàn)過程中根據(jù)真實樣本數(shù)據(jù)集進行參數(shù)調(diào)優(yōu)。
4 實景驗證
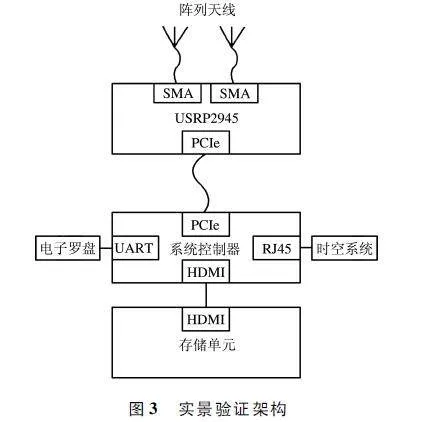
針對上述所提模型及方法開展真實場景下的可行性驗證,數(shù)據(jù)采集實景驗證架構(gòu)如圖3 所示。其中陣列天線安裝于列車頂部,另一端連接在部署于車內(nèi)的無線數(shù)據(jù)采集設(shè)備USRP2945 上。除此之外還使用電子羅盤實時記錄列車的方位角和俯仰角,列車時空系統(tǒng)實時提供列車的速度、位置等信息,最終所有采集數(shù)據(jù)均被保存在存儲單元中。
通過人工標定方式確定了鐵路沿線40 個干擾源的位置信息,所有干擾源與鐵路軌道之間的垂直距離均在100 ~ 1 000 m,以這些確定性信息作為基準驗證本文所提方法的有效性。采集過程中列車以300 km / h 速度勻速運行,當列車距離干擾源較遠時接收到的無線信號較弱難以進一步分析,采集結(jié)束之后選擇列車距離干擾源較近位置采集的數(shù)據(jù),最終整理后的有效數(shù)據(jù)總時長為900 s,USRP2945 載頻設(shè)置為935 MHz,帶寬為20 MHz。
4. 1 數(shù)據(jù)預(yù)處理性能驗證
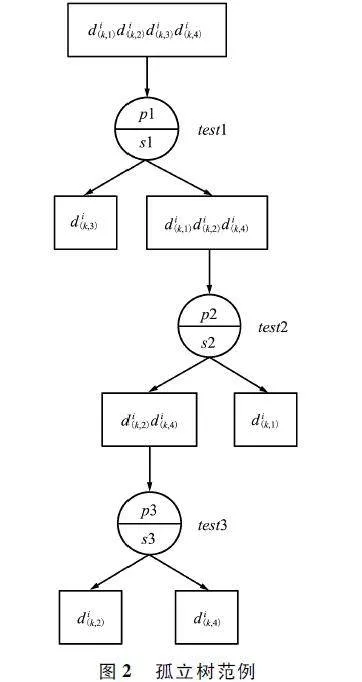
所有整理后的有效數(shù)據(jù)根據(jù)時隙劃分,圖4 為某時隙內(nèi)單通道的GSMR 干擾信號強度變化,可以看出由于采用時分復(fù)用體制,該信號幅度變化較大,所有數(shù)據(jù)點都參與定位計算會出現(xiàn)較大誤差。陣列中兩天線距離為1. 015 m,參考式(14)可以計算相位差閾值,根據(jù)該閾值首先篩選掉不符合相位差限制的采集數(shù)據(jù)。進一步基于算法1 對采集的雙通道數(shù)據(jù)進行預(yù)處理,算法執(zhí)行過程中的參數(shù)設(shè)置如表2 所示。
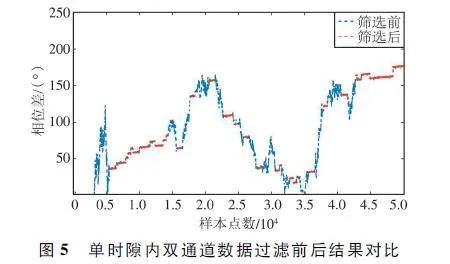
圖5 展示了算法1 處理前后的單時隙內(nèi)雙通道相位差對比結(jié)果,可以看出篩選前兩通道相位差在信號不存在處隨機擾動,篩選后的兩通道相位差僅在信號存在處取值,數(shù)值呈線性變化。
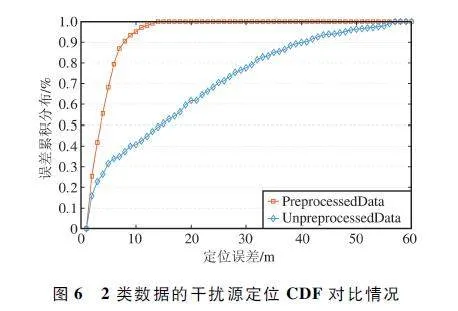
對做過異常樣本篩選的數(shù)據(jù)(PreprocessedData)和未做異常樣本篩選數(shù)據(jù)(UnprocessedData)針對干擾源定位效果做對比實驗,比較二者連續(xù)追蹤干擾源時的正確率。定位方法采用相差定位法,樣本為已知干擾源附近采集的20 個時隙數(shù)據(jù)段,每16 個數(shù)據(jù)點為一組進行干擾源定位計算,記錄每組計算結(jié)果的定位誤差。最終根據(jù)定位誤差的不同取值統(tǒng)計各誤差值下的定位誤差累積分布函數(shù)(Cumulative Distri-bution Function,CDF)。
圖6 展示了同一樣本規(guī)模條件下2 類數(shù)據(jù)的干擾源定位CDF 對比結(jié)果。由圖6 可以看出,經(jīng)過異常樣本篩選數(shù)據(jù)的最大定位誤差為12 m,而未做異常樣本篩選數(shù)據(jù)的最大定位誤差為57 m,表明使用同樣的定位算法,做過異常樣本預(yù)處理的數(shù)據(jù)在定位計算過程中具有整體較低的定位誤差,且誤差分布范圍較小;而未經(jīng)異常樣本處理的數(shù)據(jù)在定位計算過程中受干擾影響較大,定位誤差較大且分布范圍較大。原因在于做過異常樣本預(yù)處理的數(shù)據(jù)消除了信號不存在和誤差較大處異常樣本的影響,保留下來的大部分都是高質(zhì)量信號數(shù)據(jù),另外經(jīng)過算法1 的處理,單時隙內(nèi)的有效數(shù)據(jù)點數(shù)量整體減小,且整體數(shù)據(jù)質(zhì)量較高,因此在最終的定位計算過程中可以獲得較好的結(jié)果。
4. 2 干擾源定位性能驗證
為研究本文方法在干擾源定位方面的性能,使用頻差變化率定位方法和振幅變化率定位方法做對比實驗。頻差變化率定位方法要求接收端多通道穩(wěn)頻接收,需要陣列天線共時鐘,這些在USRP2945 正式采集數(shù)據(jù)之前通過多通道校正已滿足。振幅變化率方法則限制較少,使用一根天線即可實現(xiàn)距離測算,2 根天線能較好地實現(xiàn)列車左右方位的區(qū)分。3 種方法使用的數(shù)據(jù)均是經(jīng)過預(yù)處理之后的采集數(shù)據(jù),比較不同算法對于40 個已知位置信息干擾源的定位能力。由于數(shù)據(jù)采集過程中列車時空系統(tǒng)提供了陣列的實時位置信息,可針對每個干擾源選擇在其附近采集的無線信號用于定位計算,并記錄了各方法對于每個干擾源的定位誤差,如圖7 所示。
由于相差和振幅變化率定位方法使用2 組以上數(shù)據(jù)點即可實現(xiàn)定位計算,而頻差變化率定位方法需要比較多數(shù)據(jù)點才可用于頻譜計算,所以針對每個干擾源定位誤差統(tǒng)計時所有數(shù)據(jù)均參與了計算。振幅和頻差變化率定位法參考自文獻[27 -28],圖7 記錄的是不同方法針對每個干擾源的最小定位誤差。由圖中數(shù)據(jù)整體分布情況來,看本文所提相差變化率定位方法在定位性能方面優(yōu)于其他2 種方法,通過對不同方法的干擾源定位誤差取均值分別為3. 02、21. 68、62. 59 m,頻差和振幅變化率定位方法的定位誤差分別是相差變化率定位方法的7. 18、20. 73 倍,由此可得出,相差變化率定位方法的定位精度性能優(yōu)于頻差和振幅變化率定位方法。圖7 中各方法定位計算過程中,頻差變化率定位法主要通過兩接收天線信號頻率差估計,再由不同位置的多譜勒頻差實現(xiàn)目標定位。該定位方法一方面局限于天線間隔較近,所以定位精度不佳,另一方面多譜勒頻率差測量精度主要受限于所用數(shù)據(jù)的積累時間,由于列車高速運動,積累時間受限導(dǎo)致。振幅變化率定位法中幅度測量精度一般取決于天線方向圖的波束寬度,文中選擇全向天線進行測試,主要根據(jù)天線接收信號的幅度變化完成定位,因全向天線波束問題其定位精度也相對不高。高正確率需要更高條件去保障,相差變化率定位方法要求在采集過程中滿足多通道穩(wěn)相接收,因此需要采集設(shè)備在使用前先校正,同時要求配套陣列天線型號必須一致且晃動少于波長的1 / 15,相比而言其他2 種方法的采集要求更加寬松一些。
5 結(jié)論
移動通信運營商在鐵路沿線部署的移動通信系統(tǒng)會對鐵路專用通信系統(tǒng)造成干擾,可能影響到行車效率和安全。為了對這些干擾源進行定位,提出了一種基于相差變化率的GSMR 干擾源直接定位方法。使用角度變化率實現(xiàn)無源直接定位是一種比較成熟的技術(shù),然而存在對測角度儀器要求較高且存在誤差較大等問題,而相位差變化率無源定位方法具有機動性能好,定位收斂快和定位誤差低等優(yōu)點。基于此,本文研究了相位差變化率與角度變化率之間的關(guān)系,借助于微分變形將方位角及其變化率用相位差及相差變化率進行表示,建立了干擾源目標的位置求解模型。為了避免采集數(shù)據(jù)中的異常樣本對最終的定位計算造成影響,提出了基于孤立森林的異常樣本過濾算法。設(shè)計了二元陣列接收系統(tǒng)并搭建實景環(huán)境對鐵路沿線數(shù)據(jù)進行采集并開展數(shù)據(jù)分析,可以得出以下結(jié)論:
① 設(shè)計的GSM-R 干擾源直接定位技術(shù)中包含的陣列部署方案和參數(shù)配置,可以正確捕捉到干擾源發(fā)送的無線信號,經(jīng)過進一步分析處理可以準確定位到干擾源的位置。
② 所提的基于孤立森林的采集數(shù)據(jù)預(yù)處理方法處理后的采集數(shù)據(jù),能夠有效濾除部分異常樣本,避免對干擾源定位計算的影響,提高了數(shù)據(jù)的質(zhì)量。
③ 基于所提的相差變化率為自變量的干擾源位置求解模型,使用真實的采集數(shù)據(jù)進行模型求解,可以獲得較高精度的干擾源位置信息。通過設(shè)置實景驗證環(huán)境,采集了40 個已知位置信息干擾源的發(fā)射信號,通過與頻差變化率定位方法和振幅變化率定位方法進行定位誤差對比測試,發(fā)現(xiàn)頻差和振幅變化率定位方法的定位誤差分別是本文所提方法的7. 18、20. 73 倍,證明了所提方法在定位精度性能上的優(yōu)勢。
現(xiàn)實情況下的鐵路沿線兩側(cè)地貌場景經(jīng)常不同,通常兩側(cè)分別是山地和居民區(qū),本文沒有針對二元陣列定位的鏡像問題專門開展研究,下一步研究中將對此進行完善。
參考文獻
[1] 尹修亮,徐智岳. GSMR 系統(tǒng)的干擾分析及解決方法[J]. 中國無線電,2013(5):43-44.
[2] 馬振華. GSMR 系統(tǒng)運行網(wǎng)絡(luò)實時干擾檢測技術(shù)研究[D]. 西安:西安電子科技大學(xué),2020.
[3] 邢小琴. 高速鐵路GSMR 網(wǎng)絡(luò)檢測/ 監(jiān)測數(shù)據(jù)分析關(guān)鍵技術(shù)研究[D]. 北京:中國鐵道科學(xué)研究院,2014.
[4] SHAN Q,WEN Y H. Research on the BER of the GSMRCommunications Provided by the EM Transient Interferencesin Highpowered Catenary System Environment[C]∥2010International Conference on Electromagnetics in AdvancedApplications. Sydney:IEEE,2010:757-760.
[5] 夏楠,高丹陽,邢寶輝,等. 基于外輻射源的空中目標直接定位算法[J]. 通信學(xué)報,2023,44(6):117-124.
[6] CHENG Y Y,LIN Y Y. A New Received Signal StrengthBased Location Estimation Scheme for Wireless SensorNetwork[J]. IEEE Transactions on Consumer Electronics,2009,55(3):1295-1299.
[7] LI H,ZHANG M,GUO F C. A Novel Single SatellitePassive Location Method Based on Onedimensional CosineAngle and Doppler Rate of Changing[C]∥2018 IEEE International Conference on Signal Processing,Communications and Computing (ICSPCC ). Qingdao:IEEE,2018:1-6.
[8] 郭輝,馬寶宏,侯慶禹. 單站無源定位中角度變化率的測量方法研究[J]. 航天電子對抗,2011,27(3):30-32.
[9] 徐若銘. 基于麥克風陣列的無人機定位與跟蹤[D]. 成都:電子科技大學(xué),2022.
[10] KIRYANOV A V. Accuracy Enhancement for Precision Angle Measuring Structures[J]. Key Engineering Materials,2010,437:198-202.
[11] 李云,高太長,江志東,等. 基于FDTD 的振幅頻譜法定位精度評估[J]. 解放軍理工大學(xué)學(xué)報(自然科學(xué)版),2016,17(1):81-87.
[12] 郁濤. 基于角度變化率的機載多普勒直接測距方法[J]. 航空工程進展,2011,2(3):335-338.
[13] 朱澤雄. 運動機載平臺相位差變化率無源定位技術(shù)研究[D]. 哈爾濱:哈爾濱工程大學(xué),2018.
[14] TAO Y. Airborne Detection Method and Precision Analysisfor Doppler Shift Based on Phase Difference Measurement[J]. Frontiers of Electrical and Electronic Engineering,2010,5:493-495.
[15] 馬飛虎,鄂棟臣,趙建虎,等. 多波束聲強振幅濾波方法比較研究[J]. 武漢大學(xué)學(xué)報(信息科學(xué)版),2010,35(9):1082-1085.
[16] ZHI H W,XIONG C,XU Z,et al. Novel Passive VectorSum Amplitudevariable Phase Shifter with IntegratedReconfigurable Filtering Function[J]. IEEE Transactionson Microwave Theory and Techniques,2022,70 (7 ):3511-3523.
[17] 曲志昱,王超然,孫萌. 基于改進迭代擴展卡爾曼濾波的3 星時頻差測向融合動目標跟蹤方法[J]. 電子與信息學(xué)報,2021,43(10):2871-2877.
[18] SHI D Y,GAN W S,LAM B,et al. A FrequencydomainOutputconstrained Active Noise Control Algorithm Basedon an Intuitive Circulant Convolutional Penalty Factor[J]. IEEE ACM Transactions on Audio,Speech,and Language Processing,2023,31:1318-1332.
[19] 康琦,鄭麗娜,王海江. 異相差分濾波效應(yīng)的航空相機圖像檢焦方法[J]. 紅外與激光工程,2021,50 (8):236-244.
[20] ZHANG Y S,GAO Y D,LI S J. Phase Cost Indicatorguided Central Difference Information Filter 2D PhaseUnwrapping Approach [J ]. IEEE Journal of SelectedTopics in Applied Earth Observations and RemoteSensing,2023,16:4096-4108.
[21] DIOUF C,JANSSEN G J M,DUN H,et al. A USRPbasedTestbed for Wideband Ranging and Positioning Signal Acquisition[J]. IEEE Transactions on Instrumentation andMeasurement,2021,70:5501915.
[22] 杜夢園,趙宏鐘,贠齡童. 基于apFFT 的I / Q 通道幅相誤差校正算法[J]. 無線電工程,2019,49(4):298-303.
[23] 呂少嵐,王華偉,侯召國,等. 基于集成孤立森林的無人機異常檢測算法[J]. 無線電工程,2022,52 (8):1375-1385.
[24] LIU F T,TING K M,ZHOU Z H. Isolationbased AnomalyDetection[J]. ACM Transactions on Knowledge Discoveryfrom Data,2012,6(1):1-39.
[25] LI Z,ZHANG Y,ZHANG J P,Potential Target Region Extraction and Isolated Forest with Statistical CorrelationRepresentation for Hyperspectral Anomaly Detection[J].IEEE Transactions on Geoscience and Remote Sensing,2022,60:5517718.
[26] MI J P,HOU Y C,HE W T,et al. A Nonparametric Cumulative Sumbased Fault Detection Method for RollingBearings Using Highlevel Extended Isolated Forest[J].IEEE Sensors Journal,2023,23(3):2443-2455.
[27] 劉治甬,葉波濤. 電子戰(zhàn)比幅測向系統(tǒng)寬頻帶天線單元分析[J]. 艦船電子對抗,2013,36(4):92-94.
[28] CHEN J L,GU H,SU W M. A New Method for Joint DODand DOA Estimation in Bistatic MIMO Radar[J]. SignalProcessing,2010,90(2):714-718.
作者簡介
李潤雷 男,(1993—),碩士,助理研究員。主要研究方向:鐵路通信檢測技術(shù)。
(*通信作者)孟景輝 男,(1984—),碩士,高級工程師。主要研究方向:鐵路通信檢測技術(shù)。
樊 濤 男,(1989—),工程師。主要研究方向:鐵路通信檢測數(shù)據(jù)分析。
酒昀洋 女,(1992—),博士研究生。主要研究方向:鐵路通信檢測數(shù)據(jù)分析。
基金項目:中國鐵道科學(xué)研究院集團有限公司院基金青年專項課題(2022YJ182)
