一種基于ResNet的雷達弱小目標檢測方法
2024-08-23 00:00:00邱明稢張鵬汪圣利
無線電工程 2024年7期




摘 要:為了解決恒虛警率(Constant False Alarm Rate,CFAR) 檢測算法對雷達弱小目標檢測困難的問題,研究了基于卷積神經網絡(Convolutional Neural Network,CNN) 的目標檢測方法。充分利用神經網絡在特征提取上的優良性能,提出了一種基于殘差網絡(Residual Network,ResNet) 塊的雷達弱小目標檢測方法。突破了傳統方法僅利用幅度信息進行目標檢測的框架,充分挖掘雷達回波數據中目標的相位特征作為神經網絡目標分類檢測的依據。經實驗驗證,所提出的方法在目標回波信噪比僅有-7 dB 情況下,仍可實現50% 以上的發現概率,并且隨著信噪比的降低,所提方法的優異性越發明顯。
關鍵詞:恒虛警率檢測;殘差網絡;弱小目標檢測
中圖分類號:TN959. 1 文獻標志碼:A 開放科學(資源服務)標志碼(OSID):
文章編號:1003-3106(2024)07-1652-08
0 引言
雷達是一種利用目標對電磁波的反射來探測其位置的電子設備,相比于可見光探測或紅外探測等光學探測手段,雷達探測具有不受天氣影響、探測距離遠的優勢,因此是目前廣泛使用的目標探測手段之一[1-2]。雷達對目標進行檢測是依據目標的回波幅度進行判斷的,當收到外界噪聲或雜波等因素影響時,需要合理地設置門限以避免產生過多的虛警從而影響檢測效果。恒虛警率(Constant FalseAlarm Rate,CFAR)檢測作為目標檢測的重要手段,一直是雷達目標檢測研究的重點[3]。CFAR 檢測能夠根據雷達雜波數據動態調整檢測門限,在虛警概率保持不變的情況下使目標檢測概率最大化[4]。
單元平均CFAR (Cell Averaging CFAR,CA-CFAR)是最早被提出的CFAR 檢測算法,包含了這一類檢測算法的最基本概念,即在檢測目標時,利用待檢單元周圍的部分單元數據進行背景的雜波功率估計,并依此設定目標的檢測門限,從而獲得良好的檢測性能[5]。但是CA-CFAR 檢測算法在面對同一方位上具有多個較靠近目標的場景時,如果一個或多個目標處于某一待檢測目標的參考單元中,會由于目標回波影響導致對背景雜波功率估計過高,使得待檢測目標無法正常被檢測。此外,在目標位于雜波邊緣處時,受到雜波的影響將導致大量過門限點被檢測出來,使得CACFAR 檢測算法的虛警率過高。針對上述的問題,Smallest Of CFAR (SO-CFAR)和Greatest Of CFAR(GO-CFAR)被提出,通過選取目標兩側背景功率估計值中的較小值或較大值,實現了更為準確的背景功率估計[6]。為了避免目標的多散射體造成背景功率估計值過大,CFAR算法除了用于統計背景功率的參考單元外,還設計有保護單元。
不少文獻對不同CFAR 檢測算法進行性能分析對比,以求為實際應用中的檢測算法選取提供指導和幫助[7]。然而近年來,隨著電子信息、材料和無線通信等多個領域的蓬勃發展以及隱身技術的日趨成熟,無人機、隱身飛機等雷達弱小目標越發普遍出現,在俄烏沖突中大量使用的無人機充分表現出了隱蔽襲擊的優勢,成為防空雷達探測防御的重點目標[8-10]。對雷達弱小目標而言,傳統的CFAR 檢測算法在低信噪比情況下的檢測效果往往難以滿足使用需求,信噪比成為了制約其性能的主要因素[11]。
隨著計算機硬件處理能力和技術的發展,神經網絡得到了人們的逐漸關注。得益于神經網絡從復雜數據中自動提取數據的深層次特征信息的能力,其在語音識別、圖像識別等多領域均取得了巨大成就[12],同時為雷達領域的應用提供了新的研究思路。當前神經網絡在雷達目標檢測方面的應用主要集中在對距離- 多普勒(Range Doppler,RD)譜圖像[13-14] 和對合成孔徑雷達(Synthetic ApertureRadar,SAR)圖像[15-16]的目標檢測,主要原因是在計算機視覺領域,神經網絡的目標檢測方法普遍是針對二維圖像應用的,而RD 譜圖像或SAR 圖像與其具有較多的相似之處,因此較容易進行直接應用。然而這些目標檢測方法利用的僅僅是雷達回波的幅度信息,本質也是基于信噪比的目標檢測,對于弱小目標的檢測將同樣存在困難。
然而雷達回波信號與傳統圖像不同,每個采樣數據是以復數形式存在的,其中不僅僅包含有幅度信息,還包含有豐富的相位信息。在目標回波的信噪比較低的情況下,相比單純利用幅度信息進行目標檢測,同時充分利用相位信息,發揮神經網絡提取數據深度特征的能力,獲取目標和噪聲、雜波間相位信息的差異,將可能提升目標的檢測概率并降低虛警率。
本文針對低信噪比的雷達弱小目標,充分考慮卷積神經網絡(Convolutional Neural Network,CNN)在特征獲取上的優異性能,提出了一種基于殘差網絡(Residual Network,ResNet)塊的雷達弱小目標檢測方法。該方法有別于CFAR 檢測算法以及傳統的神經網絡目標檢測方法,不僅考慮了目標回波的幅度信息,而且將相位信息作為目標檢測的依據。經過與CFAR 檢測算法的仿真實驗對比,本文所提出的算法在保持高信噪比條件下目標檢測性能穩定的同時,大幅提升了低信噪比情況下的目標發現概率,以應對弱小目標探測難的問題。
1 ResNet 簡介
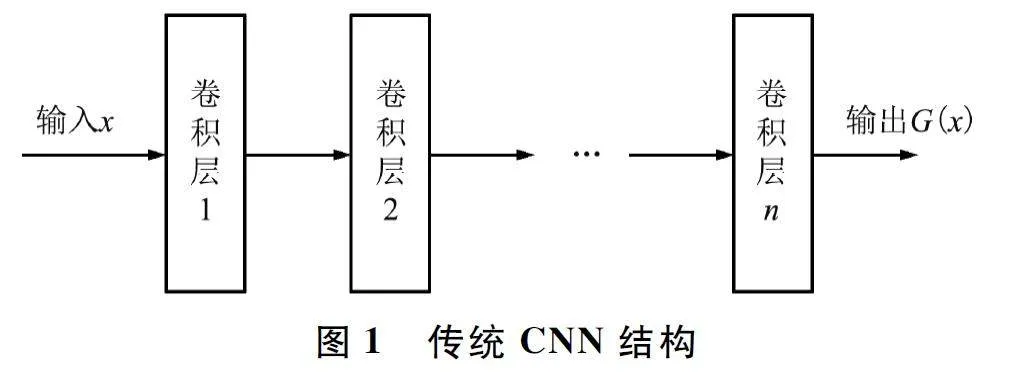
在傳統CNN 中,每一層卷積層提取得到的圖像特征直接輸入到下一個卷積層中進行更深層次的特征提取,層與層之間只有直接連接的通路,這一結構如圖1 所示。
盡管傳統CNN 能夠較好地完成大多數目標識別和分類任務,但是仍然存在一些缺點:其一是CNN 隨著網絡層數的增加,梯度消失和梯度爆炸問題越來越明顯。假設每一層的梯度誤差是一個小于1 的數,在反向傳播的過程當中,每向前傳播一次,都要乘上一個小于1 的誤差梯度,因此當網絡越來越深時,誤差梯度就越來越趨近于0;反之,如果梯度誤差大于1,則會使得傳播的梯度誤差越來越大。這2 種情況都會使得對于深度網絡的訓練成為問題,層數較為靠前的卷積層將難以進行正確的參數優化[17]。其二是由于傳統CNN 只有一條連接通路,因此最終輸入到全連接網絡中進行回歸計算的數據,只代表了最終提取到的圖像特征,無法包括在不同卷積層中提取到的不同細節程度的特征。雖然網絡計算過程中獲取到了大量的信息,但沒有能夠完全用于最終的分類或者識別,使得信息無法充分利用以提升分類或識別正確率。
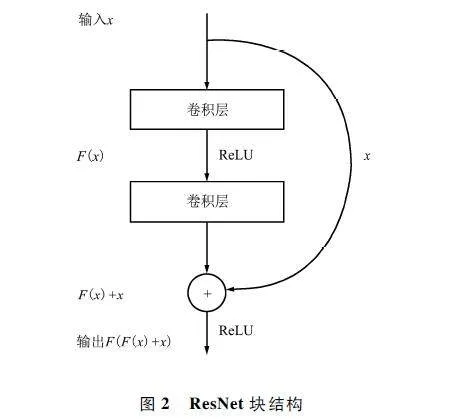
針對傳統CNN 的上述缺點,ResNet 在2015 年被提出[18],并獲得了當年ImageNet 大規模視覺識別競賽中圖像分類和物體識別的優勝。ResNet 內部使用了跳躍連接,緩解了在神經網絡中深度增加而發生的梯度消失問題,且因其結構簡單、功能實用,已被廣泛應用在計算機視覺的檢測、識別等領域。構成ResNet 的基本組成被稱為ResNet 塊,其結構如圖2 所示。
從圖2 可以看出,在ResNet 中,ResNet 塊不僅僅是對前面網絡的輸入進行卷積操作,還通過捷徑連接,使得輸入的信息也能夠在輸出中得到體現。
通過利用ResNet 塊,一方面進行梯度誤差的反向傳播階段,較后網絡層的誤差可以通過捷徑直接傳遞到前面網絡層,從而減輕了梯度消失及梯度爆炸帶來的影響;另一方面由于捷徑連接的存在,前面網絡層提取得到的圖像特征可以直接傳遞到后面網絡中,進而保留了使用淺層特征進行分類或識別的能力。
2 弱小目標檢測網絡
目標檢測是一種二元假設檢驗,可以看作是一種二元分類任務。基于這一原理,目標檢測可以視為自動目標識別應用的一種。由于神經網絡已在自動目標識別領域中取得了良好的性能,嘗試在目標檢測中使用神經網絡方法來代替CFAR 檢測器將是一種可能的有效手段。
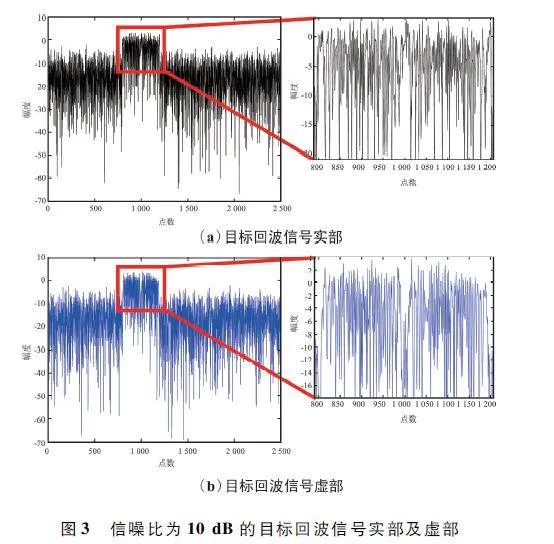
圖3 顯示了一個信噪比為10 dB 的目標回波信號在脈沖壓縮前的實部和虛部。從圖3 可以看出,在脈沖壓縮之前,經由目標反射的回波信號實部和虛部可以充分體現出線性調頻信號的相位變化特性;而在脈沖壓縮之后,目標回波在時域上被積累,這種較長時間上展現出的相位變化被轉變為了在極短時間內信號幅度上的變化。
如前文所述,既然利用神經網絡進行目標檢測是一種“識別”的手段,那么越是充分、大量的特征,將越容易被識別。而未經過脈沖壓縮的回波信號,在時域上占據的范圍較大,當脈沖壓縮的結果無法明顯區別于噪聲幅度時,通過神經網絡挖掘回波信號實部和虛部之間包含的相位特征,將能夠更為有效地從噪聲中識別目標回波,從而完成檢測。
2. 1 網絡結構
由于回波信號是一維時間序列,因此可以將其視作一個寬度為1 的圖像,從而利用神經網絡提取指定的信號特征進而進行目標檢測。
假設所接收到的雷達發射信號的脈寬為1 μs,信號帶寬與采樣頻率均為10 MHz,則從目標反射回的雷達回波長度應為10。考慮到不同雷達的脈沖寬度和帶寬需求,設定單次輸入網絡的信號長度為50,從而能夠覆蓋絕大多數近程探測雷達的信號長度需求。
當考慮輸入的信號長度為50 時,由于雷達回波信號是由復數組成的,因此網絡實際的輸入被調整為一個尺寸為1×50 ×2 的圖像。其中,50 列代表了輸入的回波信號長度,即一行中每一個數值均對應了一個時間點的信號采樣結果。同時為了能夠既滿足實數神經網絡的輸入需要,又盡可能充分利用網絡挖掘出回波信號幅度和相位中包含的信息,輸入信號中將復數回波的實數部分和虛數部分進行了分離,進而在深度維度進行拼接,從而形成了1×50×2的尺寸。
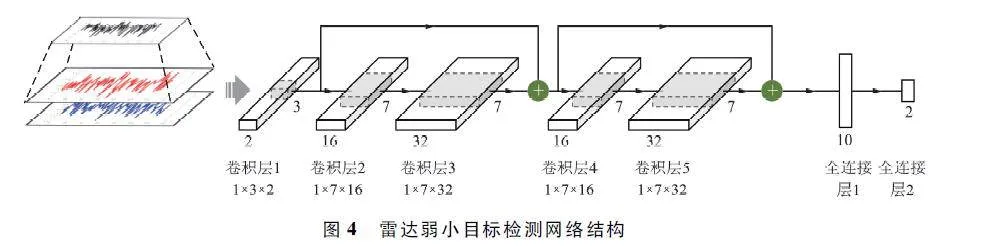
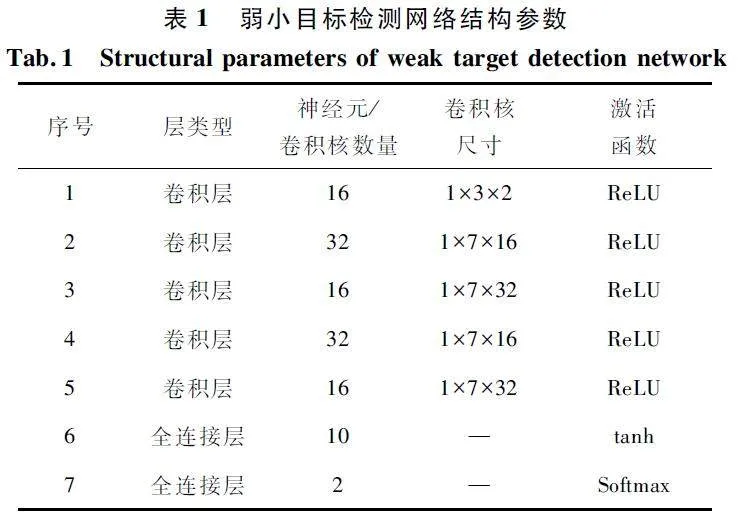
為了能夠有效提取出輸入信號所包含的幅度、相位特征,本文所提出的雷達弱小目標檢測方法由2 個相同的ResNet 塊及全連接層共同組成,包含7 層結構:
第一層為卷積層,共包含有16 個卷積核,每個卷積核的大小為1×3×2。該層的作用有2 個:一方面通過該層能夠初步將實部和虛部之間的信息進行交互,獲取到輸入信號的淺層特征信息;另一方面通過16 個卷積核在該層生成了深度為16 的輸出數據,為后續的連續2 個ResNet 塊進行數據尺寸調整。為了保持數據長度不變,采用零值對序列兩端進行填充,使得經過該層卷積層后輸出的數據大小變為1×50×16。
第二層和第三層均為卷積層,且二者連同捷徑支路共同組成了第一個ResNet 塊。第二層卷積層包含有32 個卷積核,每個卷積核的大小為1×7×16;第三層卷積層則包含有16 個卷積核,每個卷積核的大小為1×7×32。這2 層卷積層對第一層卷積層輸出的初步特征進行進一步挖掘提取,從而得到了輸入信號中所包含的更深一層次的幅度和相位特征信息。由于ResNet 具有捷徑通路,在經過第三層卷積層后,其輸出直接與第一層卷積層的輸出,也就是該ResNet 的輸入直接相加。一方面能夠使得網絡訓練時誤差更為直接地傳遞;另一方面,保證了不同細節程度的特征能夠同時被傳遞到后續的網絡中,豐富了用于后續判決的特征信息,使得基于分類的目標檢測結果更為準確。
第四層和第五層均為卷積層,共同組成了第二個ResNet 塊,且所包含的卷積核數量、大小分別與第二層和第三層相同。網絡完整結構如圖4 所示。
前五層卷積層均使用線性整流函數(LinearRectification Function,ReLU)作為激活函數,其表達式為:
ReLU(x) = max(0,x)。(1)
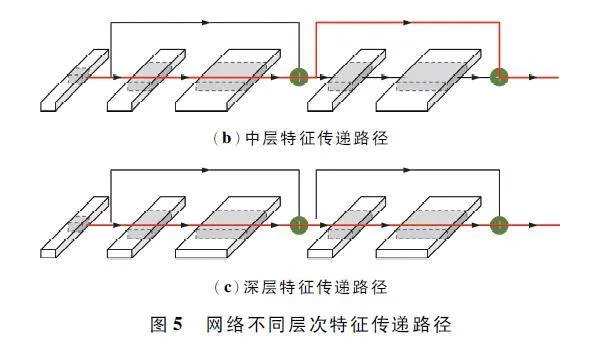
經過所設計網絡的5 層卷積層特征提取后,淺層特征、中層特征和深層特征均被傳遞至第二個ResNet 塊的輸出,豐富的特征信息使得后續的回歸分類得以更好地進行,而不像傳統的單通路神經網絡,僅能夠輸出一個層級的特征信息。前5 層卷積層獲取的不同層次特征傳遞路徑如圖5 中紅色線條所示。
第六層為全連接層,共包含10 個神經元,每個神經元與第二個ResNet 塊輸出的1×50×32 =1 600 個位置相連接。該層主要用于增加網絡的非線性擬合性能,用于對前面5 層卷積層提取得到的信號特征進行組合。經過本層的加權求和后,使用雙曲正切函數tanh 作為激活函數,其表達式為:
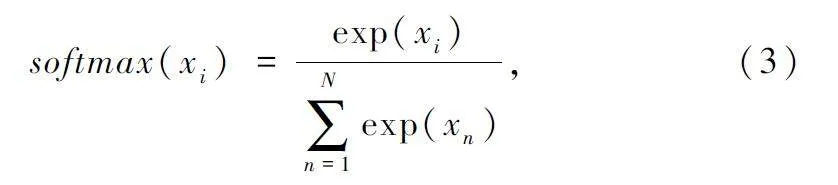
第七層,也是本文設計網絡的最后一層,同樣為全連接層,共包含2 個神經元。該層作為網絡的最終輸出層,用于對前面網絡層提取得到的特征和組合結果進行分類,因此使用歸一化指數函數softmax作為激活函數,其表達為:
式中:xi 表示第i 個神經元的輸出值,N 表示該層神經元總數量,此處為2。
經過上述7 層網絡后,根據輸入數據的不同,網絡的2 個輸出節點將分別輸出一個0 ~ 1 的數,代表當前輸入數據是否為目標回波信號。當輸入的數據為目標回波信號時,網絡的第一個輸出應為1,第二個輸出應為0;當輸入的數據不為目標回波信號時,網絡的2 個輸出則完全相反,第一個為0,第二個為1。由于2 個輸出的含義可以相互替代,因此僅需要對網絡的第一個輸出進行獲取,即可判斷輸入是否包含有目標。
網絡完整結構參數如表1 所示。
2. 2 數據生成根據線性調頻信號雷達的信號表達式,可以生成大量數據用于本文所提出的網絡的訓練和驗證。假設雷達的工作頻率為f0 ,發射的脈沖寬度為τ0 ,調頻斜率為B,目標距離產生時延為Δt,目標的回波強度為A,則從目標反射回的雷達回波信號可以表示為:
根據式(4)和式(5)可模擬出不同距離時延的目標回波信號。
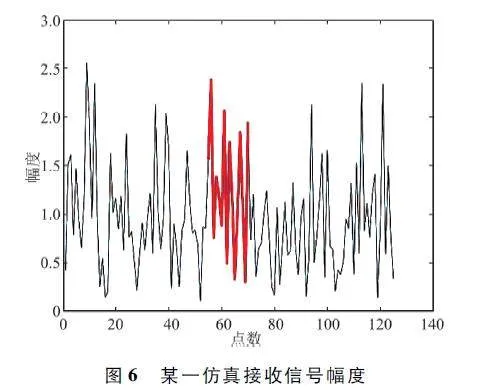
考慮一部工作在10 GHz 的X 頻段雷達,其發射脈沖寬度為4 μs,信號帶寬和采樣頻率均為4 MHz,脈沖重復周期為32 kHz,則在一個脈沖重復周期內,雷達回波信號將有125 個采樣點,其中16 個采樣點為目標反射產生。則一個位于距離雷達2 km 處,回波信噪比為0 dB 的目標產生的模擬回波信號幅度如圖6 所示,其中紅色部分為由目標反射產生的16 個采樣點。
網絡的訓練數據和實驗驗證數據均通過仿真生成。但不同的是,在對網絡進行訓練時,使用產生的理想回波信號進行訓練(未添加任何的噪聲信號);而在實驗驗證時,為了模擬弱小目標位于真實環境中的信號強度,對產生的信號添加噪聲使其信噪比在-10 ~ 0 dB。
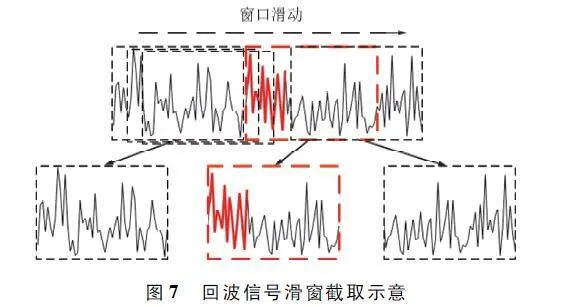
由于所設計的網絡是用于判別輸入的數據是否為目標回波信號,其中回波的起始應當與輸入信號的起始重合,即當脈沖寬度內的采樣點數為16 時,輸入的長度為50 的信號前16 個采樣點,應當為目標回波信號。對于生成的長度為125 的信號序列,按照50的窗口長度對其進行滑窗截取,該過程如圖7 所示。
將截取得到的復數序列分別取實部和虛部,從而拼接成為深度為2 的輸入序列。
值得注意的是,由于接收信號的總采樣長度為125,而目標的回波長度僅有16,且只在目標回波起始的位置網絡認為是包含目標的輸入,因此,如果將一個接收信號的所有滑窗截取結果均作為訓練集樣本,容易導致正負樣本的比例失衡,造成網絡更偏向于負樣本(無目標),而難以正確判斷出正樣本(有目標)。為了避免這種現象發生,在構建訓練使用的樣本庫時,每次添加一個隨機窗口位置截取得到的負樣本后,都增加一個正樣本到訓練集中,通過這種方式保證了網絡能夠以相等的概率學習正負樣本中的特征。
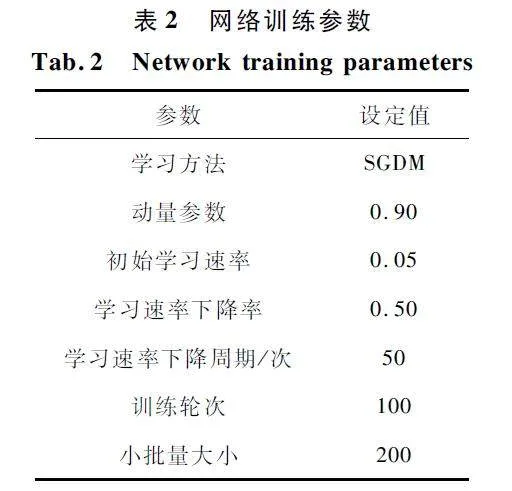
2. 3 訓練參數
相比于常規的隨機梯度下降法,帶動量的隨機梯度下降法可以更好地避免網絡在訓練過程中落入局部最優而導致無法繼續收斂。因此,本文使用SGDM 對所提出的神經網絡進行訓練。
此外,隨著網絡的訓練進行,如果始終采用恒定的學習效率,可能導致在最優值的局部區域來回震蕩。因此在訓練過程中采用了逐步減小的學習效率,以便在網絡收斂到一定程度時,能夠以更為精細的步長進行優化,得到更為良好的結果。
為了避免網絡過擬合,訓練時不是在單個訓練數據輸入完成后即刻對網絡參數進行更新,而是形成小批量進行訓練,即當有指定數量的小批量訓練數據都完成誤差計算后,才對網絡中的參數進行更新。實驗中小批量大小設定為200。
網絡的完整訓練參數如表2 所示。
3 仿真結果與分析
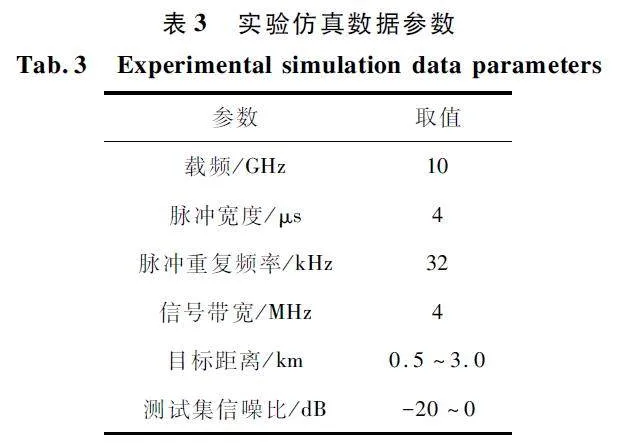
為了展示本文所提方法對雷達弱小目標的檢測性能,使用2. 2 節中描述的方法生成訓練集,并使用2. 3 節中的網絡訓練參數對網絡進行訓練,待網絡訓練完成后,使用測試集對網絡的性能進行測試。仿真使用的訓練集和測試集數據信號參數如表3所示。
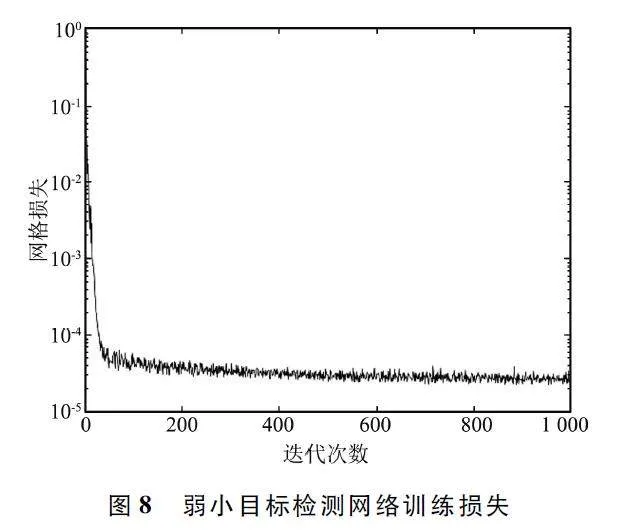
利用上述參數,根據式(4)生成雷達理想接收信號,并根據2. 2 節所述的滑窗截取方法,生成包含有2 000 個數據片段的訓練集。將訓練集中的數據逐一輸入網絡,并按照小批量進行隨機梯度下降訓練,網絡的訓練損失變化曲線如圖8 所示。需要注意的是,由于采用了小批量訓練方法,每200 個數據組成一個小批量,因此每對訓練集內的所有數據遍歷訓練一次就需要迭代10 次網絡參數,故網絡的總迭代次數為2 000/200 ×100 = 1 000。
從圖8 可以看出,經過100 輪次的訓練,網絡損失已經收斂至10-4 以下,網絡訓練有效。
使用信噪比低于0 dB 的測試集數據對網絡進行性能測試。由于神經網絡是對輸入的信號進行分類,且輸出是0 ~ 1 均勻分布的結果,相比以dB 為單位的非線性表示方法,使用線性表決門限將更為適合。因此在默認情況下,當最后一層的第一個神經元的輸出大于0. 5 時,即可認為對于當前輸入,網絡認為是目標的概率大于不是目標的概率,從而將其標記為目標。
在測試集中,在-15 ~ 0 dB(1 dB 步進)信噪比下各自產生了1 000 條使用表3 所示參數生成的雷達接收信號序列,因此總共生成了16 000 條信號序列,每條信號序列長度均為125。在使用訓練好的網絡進行目標檢測時,仍采用滑窗截取的方式,逐一將長度為50 的數據輸入網絡,并把網絡輸出層第一個神經元的輸出大于0. 5 的點標記為檢測到的目標點。
由于對于神經網絡,這一檢測過程是通過分類的形式完成的,因此沒有傳統雷達目標檢測中的發現概率(Pd)和虛警率(Pf )的解析式。為了合理評價本文算法與CFAR 檢測算法之間的優劣,從Pd 和Pf 的物理含義入手,定義神經網絡的Pd 和Pf 表達式如下:
Pd = ncorrect/ntarget, (6)
Pf = nfalse/nall, (7)
式中:ncorrect 和nfalse 分別代表正確檢測的數量和錯誤檢測的數量,ntarget 代表測試集中包含的目標總數,nall 代表所有的檢測點數量。在本實驗中,當信噪比指定時,則總檢測點數量nall = 1 000 × 125 =125 000。
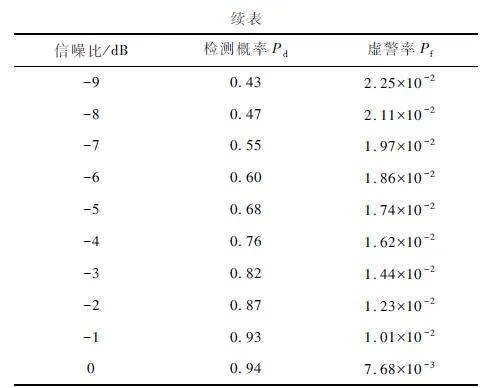
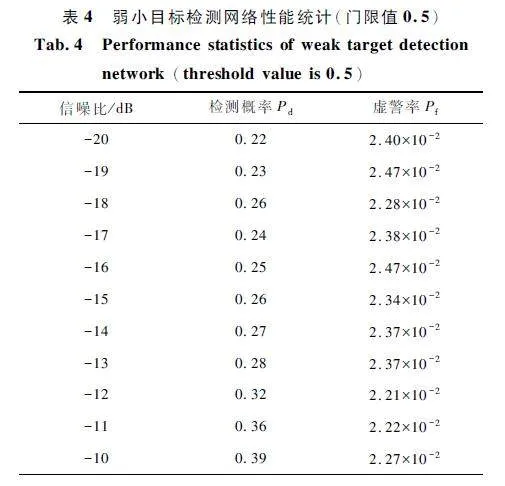
分別統計不同回波信噪比下使用本文所提方法對于仿真數據中目標的Pd 和Pf,得到如表4 所示的統計結果。
從表4 可以看出,隨著弱小目標信噪比的逐步提升,網絡對于目標的發現概率迅速上升,且虛警率持續下降。當目標信噪比達到-7 dB 時,網絡對其的檢測概率已經超過了50% ;而對于-3 dB 以上的弱小目標,網絡對其的發現概率更是超過了80% 。
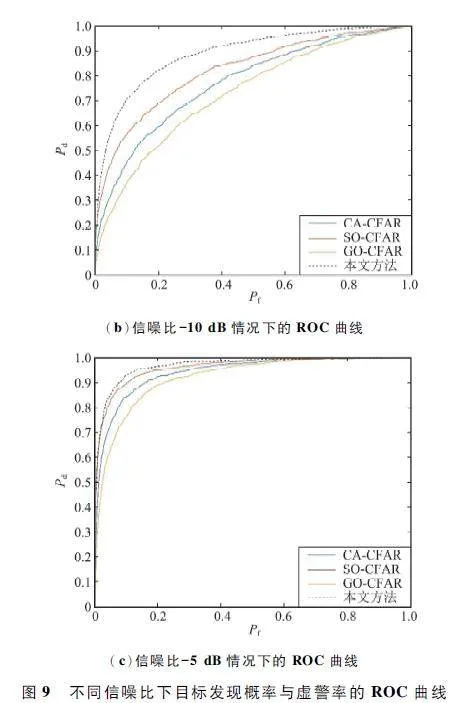
為了顯示本文所提方法相較于傳統CFAR 檢測算法的優勢,在特定的信噪比情況下,通過調整網絡最終的目標檢測門限以控制檢測的虛警率,以及直接調整CFAR 檢測算法的虛警率,繪制2 種算法的接受者操作特性(Receiver Operating Characteristic,ROC)曲線如圖9 所示。
從圖9(a)~ 圖9(c)可以看出,對于信噪比小于-5 dB 的弱小目標,本文所提出的基于ResNet 塊的雷達弱小目標檢測方法ROC 曲線面積始終大于CFAR 檢測算法的ROC 曲線面積,這也表明了本文算法對于弱小目標的檢測性能始終較優。從變化趨勢上可以發現,隨著信噪比的降低,本文所提方法的檢測效果相比傳統CFAR 檢測而言優勢更加明顯,充分表明了本文所提的基于ResNet 塊的雷達弱小目標檢測方法的有效性。
4 結束語
針對低慢小目標雷達回波幅度弱,快速運動下難以長時間積累的問題,本文創新地提出了一種基于ResNet 塊的雷達弱小目標檢測方法,充分利用雷達接收信號中目標回波的幅度和相位特性進行分類判別,從而檢測出目標的位置。同時,本文所提方法巧妙利用了ResNet 中的捷徑連接支路,將不同層級的特征同時用于最后的網絡回歸分類中,使得網絡對于信噪比小于-5 dB 的弱小目標仍能具有較好的檢測性能。
在實驗仿真部分,通過與當前廣泛使用的CFAR檢測算法進行比較,驗證了本文所提方法能夠在僅利用單脈沖情況下,無需經過脈沖壓縮即可快速實現目標的良好檢測,證明了所提方法的有效性。
參考文獻
[1] 陳唯實,黃毅峰,盧賢鋒. 多傳感器融合的無人機探測技術應用綜述[J]. 現代雷達,2020,42(6):15-29.
[2] 張萬順,張安清,齊海明. 雷達-紅外分布式融合多目標跟蹤算法[J]. 無線電工程,2020,50(9):769-774.
[3] 鄒成曉,張海霞,程玉. 雷達恒虛警率檢測算法綜述[J]. 雷達與對抗,2021,41(2):29-35.
[4] RICHARDS M A. 雷達信號處理基礎[M]. 邢孟道,王彤,李真芳,等譯. 北京:電子工業出版社,2008.
[5] FINN H M. Adaptive Detection Mode with Threshold Control as a Function of Spatially Sampled Clutterlevel Estimates[J]. RCA Review,1968,29:414-465.
[6] 董佳鑫. 雷達低慢小目標檢測算法研究[D]. 西安:西安電子科技大學,2022.
[7] SAHAL M,SAID Z A,PUTRA R Y,et al. Comparison ofCFAR Methods on Multiple Targets in Sea Clutter UsingSPXradarsimulator[C]∥2020 International Seminar onIntelligent Technology and Its Applications (ISITIA ).Surabaya:IEEE,2020:260-265.
[8] 翁越男,魏小平,劉洋,等. 一種基于區塊鏈的無人機集群協作監測框架設計[J]. 無線電工程,2022,52(7):1250-1259.
[9] 孫立宏,王俊. 高速運動雷達弱小目標檢測方法研究[J]. 系統工程與電子技術,2008 (2):257-260.
[10] 付振江,羅俊松,寧進,等. 無人機集群通信的應用現狀及展望[J]. 無線電工程,2023,53(1):3-10.
[11] 丁海龍,趙溫波. 基于點跡的雷達弱信噪比目標檢測跟蹤研究綜述[J]. 微波學報,2014,30(增刊1):627-635.
[12] 郭麗麗,丁世飛. 深度學習研究進展[J]. 計算機科學,2015,42(5):28-33.
[13] 李雪飛,吳迪,朱岱寅,等. 基于卷積神經網絡的動目標檢測[J]. 現代雷達,2023,45(4):16-24.
[14] 施端陽,林強,胡冰,等. 深度學習在雷達目標檢測中的應用綜述[J]. 雷達科學與技術,2022,20(6):589-605.
[15] WILMANSKI M,KREUCHER C,LAUER J. Modern Approaches in Deep Learning for SAR ATR [C ]∥Algorithms for Synthetic Aperture Radar Imagery XXIII.Baltimore:SPIE,2016:195-204.
[16] 張陽,劉小芳,周鵬成. 改進Faster RCNN 的SAR 圖像船舶檢測技術[J ]. 無線電工程,2022,52 (12 ):2280-2287.
[17] 劉建偉,宋志妍. 循環神經網絡研究綜述[J]. 控制與決策,2022,37(11):2753-2768.
[18] HE K M,ZHANG X Y,REN S Q,et al. Deep ResidualLearning for Image Recognition[C]∥Proceedings of theIEEE Conference on Computer Vision and Pattern Recognition. Las Vegas:IEEE,2016:770-778.
作者簡介
邱明稢 男,(1990—),碩士,高級工程師。主要研究方向:雷達信號處理。
張 鵬 男,(1982—),碩士,高級工程師。主要研究方向:雷達系統總體設計。
汪圣利 男,(1977—),博士,正高級工程師。主要研究方向:雷達系統總體設計。
基金項目:國家自然科學基金(62101261)
