無人機集群通信技術:最新進展及發展動向
2024-08-23 00:00:00李苗何茂霖羅俊松寧進胡艷梅多濱
無線電工程 2024年7期

摘 要:無人機(Unmanned Aerial Vehicle,UAV) 集群通信已經成為無人機技術領域備受關注的研究方向。盡管在這方面已經取得了一定的進展,但不可忽視的是仍存在一些尚未深入探討的通信問題。因此針對無人機集群通信的研究對于提高無人機集群的協同能力、感知能力、決策和規劃能力,增強系統的魯棒性和安全性,推動技術發展和應用創新具有重要意義。介紹了無人機集群的概念及其優點;對當前的無人機集群研究現狀進行了詳盡的分析;詳細介紹了近年來與無人機集群通信相關的應用場景,深入探討了這些典型應用中需要解決的關鍵技術;對未來無人機集群通信技術的發展趨勢進行了前瞻性展望。
關鍵詞:無人機集群通信;集群應用;信號增強;移動邊緣計算;聯邦學習;物理層安全
中圖分類號:V279;TN915. 0 文獻標志碼:A 開放科學(資源服務)標識碼(OSID):
文章編號:1003-3106(2024)07-1622-12
0 引言
近年來,隨著無人機制造技術的不斷進步和成本的逐漸降低,無人機已經成為公眾廣泛擁有和使用的技術工具。無人機因靈活性高、按需部署、網絡速度快以及視距(Line of Sight ,LoS)信息傳輸等獨特優勢而備受關注,成為無線通信領域的新興熱點[1]。然而,單個無人機受限于其機載能量和傳輸功率,以及通信能力相對薄弱,再加上無線網絡的開放性,可能導致服務時間不足、覆蓋范圍有限等問題,引發通信安全性方面的擔憂。因單一無人機在應用過程中受限于自身條件,難以應對日益復雜和多樣化的應用環境及任務。因此,通過多架無人機的相互配合,可以進一步形成無人機集群,從而能夠執行更為復雜的測量、監測和監視等任務[2]。
無人機集群是指多個無人機在共同的任務或目標下進行協同行動的一種組織形式。通過無人機之間的相互通信和協調,集群可以以分布式或協同的方式完成一系列復雜的任務。無人機集群概念[3]的提出及發展有效解決了單個無人機作業時載荷相對較小、信息感知處理能力相對較弱的問題。在這個系統中,無人機集群不是多無人機間的簡單編隊,而是通過必要的控制策略使之產生集群協同效應,從而具備執行復雜多變、危險任務的能力[4]。然而,在無人機集群中實現自組織通信面臨著一系列挑戰,尤其是在無人機數量龐大的情況下。無人機的高度機動性可能導致通信鏈路的頻繁變化;如果所有無人機都同時與地面節點或衛星進行通信,將帶來昂貴的通信成本,因為回程鏈路資源是有限的。為了應對這一挑戰,文獻[5]引入了簇的概念,以有效地提高大規模無人機集群的性能。在一個無人機集群中可以進一步劃分為幾個簇,通過采用適當設計的集群方案來有效提高大型無人機集群的性能,簇頭無人機負責轉發從自己的成員無人機處收集的信息[2]。
利用無人機集群進行通信不僅能通過各個無人機之間的緊密協作來有效提升載荷能力和信息處理能力,而且具有高度的自愈能力和強大的魯棒性。與單無人機輔助的無線通信相比,無人機集群通信具有以下優點:
① 高效性:無人機集群通信可以實現快速、可靠的數據傳輸,避免了傳統通信方式中可能出現的信號干擾、傳輸延遲等問題。
② 靈活性:無人機集群通信可以根據需要自由調整通信網絡拓撲結構,以適應不同的任務需求。
③ 覆蓋范圍廣:無人機集群通信可以通過增加或減少無人機節點的數量來擴大或縮小通信覆蓋范圍,可以應對不同的通信需求。
④ 可靠性高:由于無人機集群通信可以實現多路徑傳輸和多節點冗余,因此可以提高通信系統的可靠性和魯棒性。
⑤ 適應性強:無人機集群通信可以通過自主協調和動態調整節點位置、通信頻率等方式,適應不同的環境和任務需求。
⑥ 安全性高:無人機集群通信可以采用加密和身份驗證等安全措施,確保通信數據的安全性和機密性。
綜上所述,無人機集群通信具備執行更為復雜任務的潛力,且被視為未來一代網絡的重要支柱。
已有相關綜述文獻對無人機集群通信進行了深入探討。無人機集群具有為許多無人機分配任務和協同調度的潛力。對無人機間通信和協調能力的研究是推進無人機集群效用的核心。Yao等[6]認為,控制和通信是無人機集群實現自主合作的2 個關鍵要素,并對二者之間的關系進行了討論,提出了面向任務的控制與通信集成(Task-oriented Integration of Communication and Control,ToICC)框架,旨在提高無人機集群通信合作效率。在研究無人機集群中的通信與控制問題時,同時也需要考慮其中復雜的耦合約束的挑戰。對此,Khan 等[1]重點探討了運行于6G 移動網絡中的無人機集群所面臨的安全與隱私、智能和能效問題。考慮到動態不確定的環境和復雜任務的特性,無人機系統向集群、自主和群智能的發展方向勢在必行。在文獻[7]中,研究者針對無人機集群智能從層次框架的角度進行了全面的調研,并將無人機群智能的研究劃分為決策層、路徑規劃層、控制層、通信層和應用層5 個層次。文獻[8]綜合了近年來不同的通信場景,并對無人機集群通信架構和路徑規劃解決方案進行了總結。
1 無人機集群通信的應用
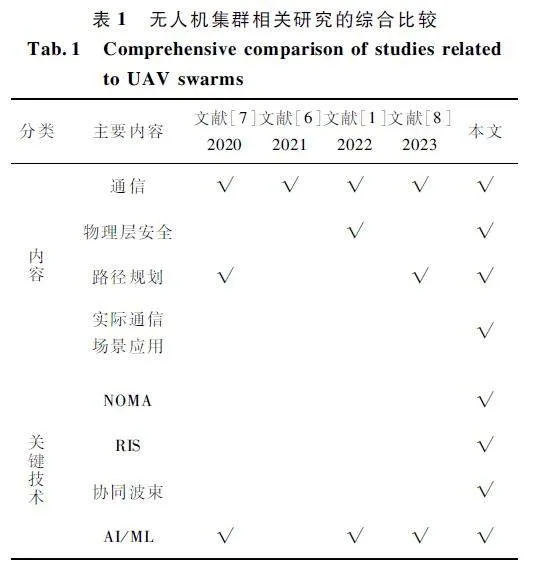
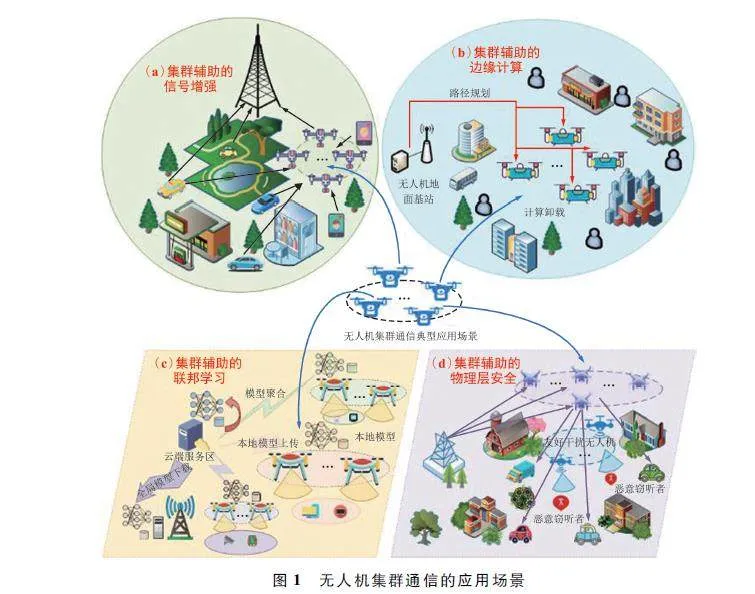
無人機集群作為一種新興的技術,由于具有高度的可控性、靈活性和可擴展性,可以在不同的應用場景中發揮出卓越的作用,進一步刺激了無人機集群在通信中的應用,包括信號增強和移動邊緣計算(Mobile Edge Computing,MEC)、聯邦學習(FederatedLearning,FL)和物理層安全。無人機集群通信的應用場景如圖1 所示。無人機集群相關研究的綜合比較如表1 所示。
1. 1 無人機集群輔助信號增強
無人機集群可用于增強連通性較差地區或通信基礎設施受損的緊急情況下的通信網絡。無人機集群可以充當中繼以擴大通信網絡的覆蓋范圍,同時可以使用信號處理技術來提高信號質量,圖1(a)展示了無人機集群輔助的信號增強場景。在該模型中,無人機集群旨在通過收集分布在不同空間位置的成員無人機所接收的信號,并將其傳輸至集中的簇頭無人機中,簇頭無人機再將接收到的信號發送給遠程基站,從而增強信號的質量和可靠性。通過對無人機集群中的無人機的軌跡優化,以及簇頭選舉優化實現無人機集群信號增強,可以實現對信號的廣播、中繼和增強。除此之外,無人機集群輔助的信號增強可以被應用于包括應急無線網絡、超越5G和6G 系統以及智能電網等場景[9]。
無人機集群因具備動態自組織通信的能力而表現出高度靈活性,能夠在許多通信質量不佳的場景中實現信號增強。為了解決在干擾環境下的無人機集群通信信號匯聚率低的問題,文獻[2]采用了基于集群的網絡架構來實現回程鏈路的高效傳輸,通過優化無人機的軌跡,并結合聚類約束,以最大限度地提高集群簇頭無人機的匯聚率。在面對物聯網的連通性受到障礙限制時,具有高自由度和靈活性的無人機集群為解決連通性問題提供了一種新的途徑。文獻[10]提出了3 種無人機集群模式,并設計了用以增強無人機集群連通性的算法,實現了跨區域的網絡連接。此外,協同波束形成(CollaborativeBeamforming,CB)和可重構智能表面(ReconfigurableIntelligent Surface,RIS)與無人機集群的結合,增強了無人機集群的通信能力。在無人機集群使能CB中,文獻[11]提出由多架無人機組成的虛擬天線陣列(Virtual Antenna Array,VAA)可以通過調整無線電能量的空間分布來提高特定方向上的信號強度,從而提高無人機中繼系統的性能。RIS 通過調整無源反射元件的振幅和/ 或相位來優化信號反射,在無線網絡中提供了巨大的頻譜和能量效率。文獻[12]提出RIS 可以安裝在無人機上形成空中RIS,并與無人機集群用戶同步飛行,為無人機集群用戶提供可靠的反射信號。
無人機集群輔助的信號增強在未來有很大的發展潛力,可以考慮利用空中無人機和地面基站之間的頻譜共享和合作來實現更高效的通信和數據傳輸。這種方式可以通過讓空中無人機和地面基站共享頻譜資源,從而提高頻譜利用率和數據傳輸速度。此外,空中無人機和地面基站之間的合作也可以進一步提高通信和數據傳輸的效率,例如通過無人機中繼、協同傳輸。
1. 2 無人機集群輔助的MEC
近年來,無人機集群輔助的MEC 引起了極大關注[13],這種模式通過適當利用網絡邊緣的計算資源,減少處理延遲,提高利用效率,可以顯著提高無人機支持的邊緣計算網絡的性能。無人機集群輔助的MEC 是一種利用多個無人機構成集群,群中的專用無人機配備了輔助數據處理的計算元件來協助本地數據處理或通過非粒度加載(Fine-grained Off-loading)的數據處理方式,協同完成計算任務和數據處理的技術。由于無人機集群的移動性和自主性,無人機成為一種MEC 節點的潛在選擇[14]。無人機集群輔助的MEC 具有很多優點,可以解決大規模計算和數據處理的問題,提高通信效率和響應速度,同時保證數據的安全性和隱私保護。通過相互協作,無人機集群輔助的MEC 可以完成更復雜的任務。在無人機輔助的MEC 網絡中,傳統的MEC 基站仍然存在,當固定基站受到自然災害破壞時,無人機可以作為備用基站。在地面站控制的無人機飛行任務中,借助動態軌跡,可以實現性能較好的計算卸載或緩存服務,如圖1(a)所示。在用戶設備-無人機-地面基站3 層架構中,對于用戶設備因為阻塞或其他原因無法將計算任務直接卸載到地面基站的服務器上的場景,用戶設備可以把計算密集型任務卸載到無人機上,或者通過無人機中繼將部分任務進一步卸載到地面基站中計算能力更強的服務器上。
為了滿足5G 系統應用中普遍存在的超低延遲服務需求,文獻[15]提出了一個飛行自組織網絡(Flying Ad-Hoc Network,FANET),由配備MEC 設施的無人機組成,以擴展網絡切片(Network Slices)。在所提出的框架下,使得位于遠離結構化核心網絡(Structured Core Network)[16]的地理區域內的地面設備產生的大量數據可以及時獲得計算服務。文獻[17]研究了在車輛網絡中無人機集群輔助的MEC 的場景,在這種場景中,將邊緣計算器安裝在無人機上,為用戶提供計算卸載,并提出了一種車輛網絡中的邊緣計算和無人機集群輔助協同任務卸載方案,保證車輛在峰值交通量中的實時需求。文獻[18]研究了一個服務驅動的協同MEC 模型,以支持無人機集群中的計算密集型和延遲關鍵服務。文獻[19]提出將MEC 技術部署在無人機上,建立一個2 層的無人機網絡來聯合優化通信和計算資源,用于盡快將重要的和緊急的消息傳輸到控制中心,通過提出的聯合通信和計算優化算法實現了最優響應延遲。文獻[20]介紹了目前的無人機集群輔助的邊緣計算的研究進展,還討論了如非正交多址接入(Non-Orthogonal Multiple Access,NOMA)這些應用于無人機集群邊緣計算中的一些技術。文獻[21]利用RIS 來改善無人機和物聯網設備之間的無線通信,研究了一組無人機在不均勻地形上進行MEC 的路徑規劃和傳輸的聯合問題。
雖然無人機集群輔助的MEC 應用展現出許多的優勢,然而,也仍存在一些關鍵問題。首先,由于在無人機上安裝邊緣服務器,增加了無人機的負載和相關的能量消耗,從而進一步縮短了無人機的續航時間;其次,將用戶的計算任務卸載到無人機上會導致無人機的計算相關能耗增加,而計算相關的能耗通常比通信消耗的能耗更大。因此,為了延長無人機的服務時長,需要設計一個節能的無人機集群輔助的MEC 系統,通過對通信資源分配策略和無人機飛行軌跡優化,文獻[22 -23]解決了無人機集群輔助的邊緣計算系統中的能耗問題,使得無人機集群輔助的邊緣計算能夠在實際應用中面對能耗挑戰具備可行性。
1. 3 無人機集群輔助的FL
隨著物聯網的蓬勃發展,許多的應用數據也爆炸式增長[19],而FL 就是在這樣的背景下,成為了一種實現數據隱私保護的機器學習技術。FL 能夠允許多個設備在不共享原始數據的情況下協作訓練模型。然而,FL 存在通信鏈路故障和節點缺失的問題,特別是在需要連續交換模型參數的時候。在無人機集群輔助的FL 模式中,無人機集群可以作為無線中繼,以促進物聯網組件和FL 服務器之間的通信,彌補FL 的存在鏈路故障和節點缺失的不足,從而提高FL 的精度。
無人機集群輔助的FL,可以提高FL 的準確性和效率,同時保護數據的隱私。圖1(c)描述了由一個云端的FL 服務器和無人機集群組成的無人機集群輔助的FL 場景。該場景中無人機作為中繼設備,可以在任何需要時快速部署到指定的區域,云端FL 服務器作為FL 模型的所有者,向群中的無人機發出訓練任務,群中的無人機如果具備數據處理能力可以根據收集到的地面的信息進行模型訓練或者將信息反饋給地面設備,地面設備會根據收集到的本地數據集進行模型訓練,之后將本地模型參數通過無人機直接發給云端服務器進行模型聚合,得到全局FL 模型,然后,模型所有者將進行另一輪FL訓練并向其他群中的無人機宣布全局FL 模型參數。該過程繼續進行,直到達到模型所有者宣布的迭代次數。
FL 為一種分布式機器學習,無人機集群能夠形成一個群體進行分布式模型訓練。基于無人機集群FL 的研究理論架構和仿真的研究基礎,文獻[24]通過實際實驗重點驗證了在無人集群中部署FL 的可行性。此外,還進一步探討了訓練節點無人機與參數服務器無人機之間的距離變化對訓練精度的影響。無人機作為能量受限的設備,在節能方面,Shen等[25]研究了如何通過聯合優化訓練和網絡資源分配來提升無人機集群輔助FL 的無人機能源利用效率。Song 等[26]研究了如何通過聯合優化相對位置固定的無人機集群中無人機的計算速率、上行鏈路傳輸持續時間和下行鏈路傳輸持續時間來最小化每輪FL 迭代的延遲。Wen 等[27]研究通過無人機連接調度和無線資源的分配,在計算精度、通信和計算資源限制下,通過同時進行的無線信息和功率傳輸(Simultaneous Wireless Information and Power Transfer,SWIPT),保證面向FL 的無人機集群網絡長時間運行。此外,無人機集群也可以和NOMA 結合來輔助FL,文獻[26]提出一個NOMA FL 框架,提高了交付本地模型的效率。文獻[28]考慮到了無人機的機動性,尤其是相對位置變動對FL 性能的影響,因此,通過聯合優化FL 訓練參數、無人機軌跡、通信和計算資源的方式降低損耗,進一步提高了系統的整體效能。
無人機集群輔助的FL 是一個具有巨大潛力的研究領域,結合了無人機技術和FL 的優勢。盡管以上研究彌補了無人機輔助FL 的諸多不足,但在學習訓練中仍存在資源有限與模型精度之間的權衡問題,以及模型可靠性和魯棒性等諸多關鍵的挑戰。因此,必須啟動新的研究,以設計出能夠充分考慮無線網絡約束的高效FL 算法,同時確保學習模型的準確性。在這一過程中,應特別注意以下幾個權衡:① 需要平衡計算和通信延遲與模型學習精度之間的關系。如何在有限的計算和通信資源下,實現模型學習精度的最大化,是需要深入探索的問題。② 需關注執行本地訓練所需的計算與用戶能源消耗之間的平衡。如何在保證學習效果的同時,降低能源消耗,提高能源利用效率,也是需要重點考慮的問題。此外,復雜頻譜環境對無人機之間通信的影響也不容忽視。需要研究如何在這樣的環境下,提高面向FL 無人機網絡的穩定性[29-30],確保數據的可靠傳輸和模型的有效學習。
1. 4 無人機集群輔助的物理層安全
物理層安全是一種通過利用信道特性來隱藏信息,從而在信息理論層面上保證安全能力的有效方法,主要目標是阻止未經授權的接收者從信號中解碼出足夠強大的信息,從而使竊聽者無法獲取該信息[30]。如圖1(d),在這個系統模型中,考慮一個協作友好干擾框架,其中包含一個用于聯系遠處的地面用戶的地面基站,一群無人機和一些地面竊聽者。為了保持通信,一部分無人機充當中繼負責將地面基站的消息傳遞給地面的合法用戶,而地面存在的一些竊聽者,會竊聽來自通信無人機發給地面用戶的信息。為了維持安全通信,另一群無人機充當友好干擾無人機向地面的竊聽者發送人工噪聲(Arti-ficial Noise,AN)的干擾信號。此外,無人機集群作為通信的載體,確保了飛行的穩定性和靈活性,可以通過優化無人機集群的軌跡以滿足合法通信用戶的需求。同時,友好干擾的無人機集群可以跟蹤潛在的竊聽者,并向其持續發送干擾信號,以確保通信的持續安全性。
文獻[31]提出了一個協作友好的干擾框架,用于無人機集群輔助的放大-轉發(Amplify-and-For-ward,AF)中繼網絡。模型中考慮了一群懸停的無人機,它將信息從一個地面源傳遞到一個遙遠的目的地,并同時產生友好的干擾信號來干擾竊聽者。文獻[32]從物理層安全的角度,提出了一種有效的協同傳輸方案,其中無人機集群中的多個無人機作為地面用戶之間的多跳中繼轉發信息,而其他無人機作為友好干擾器干擾地面竊聽者。文獻[33]基于竊聽者的位置已知,無人機集群跟蹤竊聽者的運動,以干擾其接收到的信號,同時最大限度地提高主接收者的保密率。文獻[34]探討了部署無人機集群的物理層安全的權衡。通過研究竊聽者未知的無人機集群的網格形成,以最大限度地提高保密率。CB 與無人機集群的結合也能實現物理層安全,文獻[35]提出多架無人機可以通過CB 構成一個VAA,通過精心設計無人機的位置和激勵電流權重,從而優化生成的波束模式。實現主波束指向目的地,將無效或低強度信號指向竊聽者,從而實現空對地或空對空通信的物理層安全。
目前,針對無人機集群通信的物理層安全研究存在一些限制,主要表現在研究場景的局限性,大多數研究仍停留在非動態場景下,且假設竊聽者的位置是已知的。此外,現有的研究中通常采用基于確定狀態的信道模型。這些限制對于滿足實際動態場景中的實時通信需求構成了重大挑戰。因此,在未來,可以在考慮物聯網環境的動態和竊聽者的不確定性的同時,利用群智能的最新進展來優化無人機集群的軌跡。通過考慮不同的信道模型、未知節點的位置和實時通信等因素,可以進一步設計基于深度強化學習的算法來擴展新的協同無人機集群方案。
2 無人機集群通信關鍵技術
無人機集群通信是指多架無人機之間建立起相互之間的通信網絡,實現信息共享和控制指令傳輸,以協同完成復雜任務。要實現無人機集群通信,涉及多種關鍵技術的支持。本節將重點介紹無人機集群通信的關鍵技術,包括NOMA 技術、RIS 技術、CB技術和航跡規劃技術。這些技術支持是無人機集群通信的基礎,為實現無人機集群的高效協同工作提供了強有力的保障。下面將逐一介紹這些對于解決前文中無人機集群通信場景中實際問題的關鍵技術。
2. 1 NOMA 技術
由于高級多媒體應用程序(如超高清視頻、虛擬現實等)所帶來的無線容量需求的快速升級,同時,物聯網對用戶訪問的需求急劇增加,5G 網絡在支持大規模的異構數據流量方面也面臨著挑戰。在無人機集群輔助的邊緣計算中提到NOMA 是解決通信問題的關鍵技術之一[20]。NOMA 是一種很有前景的技術,通過在同一正交資源塊中容納多個用戶,從而解決了無人機集群中的挑戰[34]。
NOMA 通過在接收端采用連續的干擾消除方法,可以顯著提高5G 和未來超5G 通信系統的頻譜效率。在用戶的信道條件具有足夠的多樣性的條件下,NOMA 能實現非常高的性能增益[20]。近年來,NOMA 被廣泛研究并應用于各種通信場景,包括無人機集群通信。NOMA 技術可以解決無人機蜂窩網絡面臨著一些瓶頸,如頻譜稀缺和有限的并發連接。NOMA 的關鍵思想是利用發射機的疊加編碼(Su-perposition Coding,SC)和接收機的連續干擾消除(Successive Interference Cancellation,SIC)。這種技術使正交的資源塊(Resource Block,RB)可以在多個用戶之間共享。文獻[36]中,主要討論功率域(Power Domain)NOMA。功率域NOMA 可以同時應用于上行鏈路和下行鏈路。在下行鏈路中,基站(Base Station,BS)在相同的正交RB 上疊加并傳輸用戶信號。在接收到信號時,弱用戶將共信道干擾作為噪聲來解碼自己的信號,而強用戶執行SIC 來解碼自己的信號。在上行鏈路中,用戶通過同一正交RB 向BS 傳輸自己的信號。然后,BS 執行SIC來解碼每個用戶的信號。因此,使用NOMA,可以提高頻譜效率和并發連接的數量。NOMA 為蜂窩連接的無人機提供了一些優勢,如更大的速率區域,系統吞吐量和公平性之間的平衡性能,以及減少延遲[34]。由于NOMA 的這些優勢,已經有幾項研究利用NOMA 用于FL 以及邊緣計算[26,36-40]。為了提高FL 交付本地模型的效率,文獻[26 ]利用了NOMA 技術,使集群中的成員無人機能夠在同一資源塊上同時將本地模型發送到簇頭無人機。然后,簇頭無人機采用SIC 來緩解不同成員無人機-簇頭無人機在發送其局部模型時之間的共信道干擾。
盡管NOMA 作為一種有效的多用戶接入技術提供了一些優勢,然而,NOMA 的性能增益仍然從根本上受到信號傳播環境的限制,特別是對于信道增益差異較小的用戶。因此可以考慮將NOMA 與RIS結合,通過調整RIS 的相位來靈活改變用戶的信道條件,增加了新的自由度(Degree-of-Freedom,DoF),以提高系統性能[41]。
2. 2 RIS 技術
無人機集群是執行各種軍事和商業行動的潛在方式。然而,在高度變化的飛行條件下,在常規的群內通信網絡中,存在障礙可能會出現非視線情況。在未來的6G 技術中,RIS 已被建議作為解決這類問題的一種解決方案。在無人機集群通信的前述應用中,RIS 對于提高無人機間通信質量具有重要作用。
RIS 是一種由低成本的元表面制成的設備,具有增強從發送方到接收方的數據傳輸的強大能力,通過調整無源反射元件的振幅和/ 或相位來優化信號反射,在無線網絡中提供了巨大的頻譜和能量效率[41-42]。RIS 可以部署在建筑物上,構成地面RIS實現LoS 通信[21];安裝在無人機上,具有無人機的敏捷性和機動性,實現三維信號反射[43]。與傳統的地面RIS 相比,空中RIS 具有更高的部署靈活性、可靠的空對地鏈路和全景全角反射能力。在實際通信中,然而由于無人機有限的有效載荷、電池容量和飛行靈活性,單個無人機上的反射單元的數量受到了限制。雖然RIS 通常是輕量級的,但單個無人機啟用RIS 的大孔徑增益將不能得到保證[44]。因此,RIS 與無人機集群的結合將進一步提高系統性能。與單個無人機和地面RIS 相比,RIS 與無人機集群結合,既能很好地結合無人機集群的優勢,也能充分地發揮RIS 在輔助通信方面的潛力。
文獻[45 ]分析了RIS 輔助的跟隨無人機(Follow UAV,FUAV)到先導無人機(Leader UAV,LUAV)同步傳輸下的信道容量(Channel Capacity,CC)性能,通過構建CC 的上下邊緣,說明了RIS 對CC 的影響。在非視距傳輸(None Line of Sight,NLoS)情況下,RIS 能進一步提高無人機集群的通信網絡的性能,文獻[46]提出了RIS 輔助無人機集群網絡,該網絡可以利用無人機的敏捷性和RIS 的反射的優勢來提高網絡的性能。為了提高所考慮網絡的能源效率,共同優化了無人機的功率分配和RIS的相移矩陣。文獻[44]概述了在未來的無線網絡中通過無人機集群靈活部署RIS 來實現可靠和協作的通信,還提出了在無線網絡中的可實現的包括輔助信號增強,可處理的物理層安全等一些變革性應用。
雖然RIS 對提高無人機集群通信質量有很大的提升作用,但是當前大多數RIS 的應用僅考慮了單一環境。未來的工作可以面向更廣泛復雜的場景并研究無人機集群網絡的資源分配方案,并考慮到均勻平面陣列(Uniform Plana Array,UPA)、多RIS 和無人機的速度/ 三維軌跡[41]。同時,也可以研究更多RIS 與FL,移動邊緣結合的場景,促進無人機集群通信的智能應用。
2. 3 CB 技術
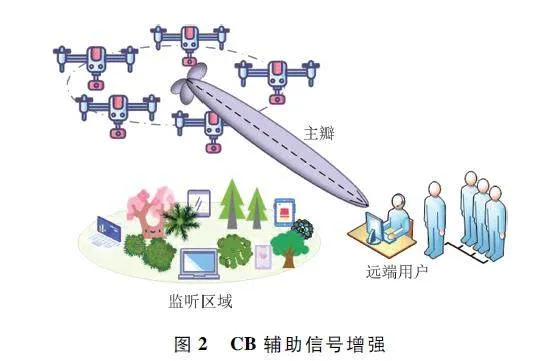
CB 是提高多天線系統通信性能的一種有效技術,能夠實現節能、遠程、安全的傳輸[47]。CB 屬于協同通信的一個分支,其基本思想是通過讓獨立分布的元素進行協同工作,從而構建一個VAA。在這個過程中,這些元素共享相同的數據,因為CB 需要在所有協作發射器之間同時傳輸相同的數據。通過利用無人機集群構建一個VAA,數據可以在每個無人機上進行聚合,并與其他無人機共享,以提高通信效率。類似于傳統的集中式天線陣列,VAA 可以執行波束形成操作,在接收到的信噪比(Signal to NoiseRatio,SNR)中提供增益。通過協同工作,無人機集群中的無人機可以合作形成一個虛擬的大型天線陣列,從而實現波束形成的優勢。這種CB 的方法可以提高通信系統的傳輸性能,包括增強信號強度[35]、降低信號干擾[47]和提高信號安全性[48]等。文獻[49]實現了第一個完整的無人機CB 框架,證明了CB 技術在無人機網絡中的實用性。
CB 是一種很有前途的提高分布式無線網絡通信距離和能源效率的方法,也是無人機通信和網絡中一種可行的傳輸策略。在文獻[35]中,如圖2 所示,網絡中的無人機可以構建一個VAA,并利用CB產生一個高增益的定向波束,指向遠程接收器,從而提高單架無人機的通信范圍。此外,使用CB 還可以有效地提高通信的能源效率。無人機網絡中的CB 可以提高通信性能。文獻[47]在無人機啟用的通信和網絡中,無人機集群可以執行一個VAA,產生一個具有尖銳的主瓣和低側翼水平(SidelobeLevel,SLL)的波束模式,從而顯著提高天線增益。此外,低SLL 也意味著干擾或敏感信號被抑制。由于強大的LoS 主導的空地信道,無人機支持的通信很容易被竊聽者竊聽,而CB 能夠實現無人機的安全信息傳輸。文獻[48]考慮了一個多個已知和未知的竊聽者存在的無人機安全通信場景,其中一組無人機組成一個無人機支持的虛擬天線陣列(UAV-enabled Virtual Antenna Array,UVAA),通過CB 向遠程基站傳輸信息。具體來說,UVAA 系統可以向接收機產生高增益主瓣,向其他方向產生低增益側瓣,從而使竊聽者不能從信號中解調有效信息。
盡管協同波束可以克服無人機集群通信中的一些關鍵問題,但無人機集群支持的CB 面臨著一些新的挑戰,如自然因素對CB 有效性的威脅。當無人機遭遇風或者其他意外情況時,可能會從指定的位置漂移,會削弱CB 的有效性。基于此,可以考慮建立一個模型來評估漂移造成的性能損失,或者進一步考慮能效合理設計無人機軌跡來恢復其位置,重建有效性連接。如果無人機不能立即改變其位置,可以調整勵磁電流權值來抵消性能損失[47]。
2. 4 航跡規劃技術
無人機集群的航跡規劃是為了在任務約束下,使整個集群以最優、高效和安全的方式完成任務。通過分析任務需求、環境感知和地圖構建,航跡規劃算法為每個無人機生成路徑,并通過協同和沖突解決來保證無人機之間的安全和協同性。同時,航跡規劃還可通過優化和實時調整來適應動態環境條件,以達到最佳性能指標。
已有的航跡規劃算法可以粗略地分為最短路徑算法、智能算法和混合智能算法。最短路徑算法包括Dijkstra 算法[50]、A 算法[51]等,對于單個無人機的路徑規劃問題,這類算法已經得到了很好的性能表現。而在面對大規模、高維度和非線性的無人機集群路徑規劃問題時,最短路徑算法的適用性卻受到了挑戰。隨著優化算法的發展,研究者開始利用集中式優化方法解決無人機集群航跡規劃問題。這些方法基于數學模型和目標函數,通過智能算法(如遺傳算法[52]、粒子群算法[53-54]等)搜索全局最優或近似最優的航跡規劃方案。智能算法能夠考慮各種約束條件和優化目標,但在大規模場景中計算復雜度較高。隨著人工智能和機器學習的發展,研究者開始將智能算法與人工智能相結合,提出了混合智能方法用于無人機集群航跡規劃。這些方法可以利用強化學習、深度學習等技術,通過學習和優化來提高航跡規劃的性能和適應性。
強化學習是一類機器學習算法,用于解決智能體在與環境交互的過程中,如何從環境反饋中學習最優行為策略的問題。強化學習主要用來解決連續決策問題,包含環境狀態、動作和獎懲。深度學習使得硬件對外界的識別感知能力得到了巨大的提升。強化學習的試錯機制表明其可以不斷與環境進行交互,在決策持續獲取獎勵為目標的前提下得到最優的決策。深度強化學習結合了深度學習的感知能力和強化學習的決策能力,從而使硬件設備直接根據輸入的信息做出一系列動作。從工作方式來看,這種學習模式更像是一種模擬了人類思維方式的人工智能實現。
深度強化學習可以幫助無人機集群通信中的無人機學習最優的行為策略,以提高通信效率和可靠性,并且可以通過自適應機制來適應不同的環境和任務需求。為了解決三維不規則地形表面覆蓋問題,文獻[55]提出了一種2 級分層的無人機集群架構。該架構為高一級的無人機提供了一種群體深度Q 學習(Swarm Deep Q-learning,SDQN)算法,使其能夠有效選擇覆蓋區域。針對低一級的無人機,研究人員設計了一種基于星型通信拓撲的覆蓋軌跡算法,用于完成指定區域內的特定覆蓋任務。文獻[56]使用分層無人機集群,實現了針對一組地面分布式設備集的在線訓練模型框架,并將提出的無人機集群航跡設計問題轉換為順序決策問題,采用了基于深度強化學習的方法解決。
合理的航跡規劃可以確保各個無人機之間的協同工作是有序的,使它們能夠有效地完成任務。但目前無人機集群的航跡規劃仍然面臨著一些挑戰,例如容錯能力,系統必須能夠在發生故障時重新組織無人機的路徑。還需要進一步考慮一些可能影響無人機軌跡的外部因素例如風、雨和飛禽等因素[57],在系統建模時納入更多實際飛行的因素,使得仿真結果能更接近真實情況。
3 未來展望
無人機集群通信是指多個無人機之間協作與通信,以實現特定任務的技術,目前是無人機技術領域的研究重點。未來,隨著無人機技術的進一步發展和應用場景的擴展,無人機集群的數量、規模、任務復雜性、飛行速度以及相對時空關系都將顯著增加。這些變化使得確保高質量的信息傳輸變得非常具有挑戰性。為了提高無人機集群通信系統的整體性能,可以向以下幾個方面不斷發展:
① 更高效的通信技術。當前無人機集群通信主要使用的是無線電通信技術,但是這種技術在高密度的無人機環境下可能會出現干擾和信號衰減等問題。未來的無人機集群通信將需要支持多種通信方式,例如,通過視覺、聲音和激光等多種方式進行通信,從而更好地適應不同環境下的通信需求。無人機集群可能包含不同類型、不同性能的無人機。研究異構通信技術,允許不同類型的無人機互聯互通,以實現集群的協同作戰和任務分配。
② 更智能的協同機制。當前的無人機集群通信主要是基于人工編程的協同機制,但是這種機制難以適應復雜的環境和任務。未來,隨著人工智能和機器學習等技術的發展,可以進一步研究能夠實現更智能、更自適應的協同機制,例如,無人機集群通信和數字孿生(Digital Twin)[58]相結合,通過數據交換和共享、模型驗證和優化,共同促進無人機集群的協同工作和性能優化。
③ 更廣泛的應用場景/ 跨領域合作。在未來的工作中,可以考慮大型無人機集群和無線網絡之外的空中無人機和地面基站間的頻譜共享和合作。無人機集群通信將不僅僅局限于單一領域的應用,而是更多地跨越不同領域實現合作,例如,可以考慮空天地異構網絡(Space-Air-Ground Integrated Network,SAGIN)[59],將無人機集群的通信應用提升到一個更高的維度,在SAGIN 的3 個部分中,無人機作為空中飛行基站為地面終端用戶提供低延時的邊緣計算服務,另外依托邊緣計算技術,還可以考慮將無人機應用于感知-通信-計算融合(Integrated Sensing,Communication and Computation,ISCC)[60]網絡架構的研究中,有效提高感知、通信和計算的服務質量。
④ 更高級的功能。當前無人機集群通信主要是實現簡單的任務協同,但是未來,無人機集群通信將能夠實現更高級的功能,如自主避障、自主充電和多機器人協作等。
⑤ 更好的安全性和隱私保護。隨著無人機集群規模的不斷擴大,安全和隱私保護將成為更加重要的問題。未來,無人機集群通信將需要更好的安全機制和隱私保護技術來保障通信安全和隱私。
⑥ 更穩定和可靠的通信。無人機集群需要具備自組織、自適應的能力。研究無線自組織網絡(Ad-hoc Network)和移動自組織網絡(Mobile Ad-hoc NETwork,MANET)技術,以實現無人機集群的快速部署和動態拓撲變化。同時無人機集群在執行任務時可能會面臨各種干擾和攻擊。研究容錯、魯棒性強的通信協議和算法,提高集群通信的穩定性和可靠性。
⑦ 能量效率優化。考慮到多元能耗的耦合,研究能量效率優化技術,降低通信過程中的能耗,延長無人機集群的服務時間。未來工作的一個重要方向是群的維度化問題,即優化組成每個群的無人機的數量和類型。無人機可以在訓練周期之間進行智能交換,以進一步優化模型性能和能源消耗之間的權衡。
4 結束語
為了構筑更智能、高效的無人機集群系統,助推無人機集群通信在這一領域實現更加廣泛的實際應用,本文對無人機集群輔助的通信應用以及相關技術進行綜述。未來,無人機集群通信在許多方面還需進一步的研究,特別是在相關算法優化、安全和隱私保護、與地面網絡及其他無線通信系統的協同工作等方面。隨著研究的深入,也會和更多的技術結合,涉及更多資源的聯合優化,能夠實現在更復雜環境中的應用。無人機集群通信是未來無人機應用的重要方向之一,隨著技術的不斷發展,將在各個領域得到廣泛應用,帶來更多的應用場景和更多的價值,為人們帶來更多的便利和效益。
參考文獻
[1] KHAN M A,KUMAR N,MOHSAN S A H,et al. Swarm ofUAVs for Network Management in 6G:A TechnicalReview[J]. IEEE Transactions on Network and ServiceManagement,2022:20(1):741-761.
[2] WU Y,GUAN X R,YANG W W,et al. UAV Swarm Communication Under Malicious Jamming:Joint Trajectory andClustering Design [J]. IEEE Wireless CommunicationsLetters,2021,10(10):2264-2268.
[3] 李鵬舉,毛鵬軍,耿乾,等. 無人機集群技術研究現狀與趨勢[J]. 航空兵器,2020,27(4):25-32.
[4] ZENG Y,WU Q Q,ZHANG R. Accessing from the Sky:ATutorial on UAV Communications for 5G and Beyond[J].Proceedings of the IEEE,2019,107(12):2327-2375.
[5] BHANDARI S,WANG X B,LEE R. Mobility andLocationaware Stable Clustering Scheme for UAVNetworks[J]. IEEE Access,2020,8:106364-106372.
[6] YAO C H,TIAN H,WANG C,et al. Joint Optimization ofControl and Communication in Autonomous UAV Swarms:Challenges,Potentials,and Framework[J]. IEEE WirelessCommunications,2021,28(5):28-35.
[7] ZHOU Y K,RAO B,WANG W. UAV Swarm Intelligence:Recent Advances and Future Trends[J]. IEEE Access,2020,8:183856-183878.
[8] 付振江,羅俊松,寧進,等. 無人機集群通信的應用現狀及展望[J]. 無線電工程,2023,53(1):3-10.
[9] ZOU Y L,ZHU J,WU T H,et al. Cooperative Drone Communications for SpaceAirGround Integrated Networks[J]. IEEE Network,2021,35(5):100-106.
[10] PEI J H,CHEN H B,TSE C K. UAV Swarm for Connectivity Enhancement of Multiple Isolated Sensor Networksfor Internet of Things Application[J]. IEEE Transactionson Vehicular Technology,2023,72(3):3914-3929.
[11] SHANG B D,BENTLEY E S,LIU L J. UAV Swarmenabled Aerial Reconfigurable Intelligent Surface(SARIS)[J]. IEEE Wireless Communications,2021,28(5):156-163.
[12] SUN G,LI J H,WANG A M,et al. Collaborative Beamforming for UAV Networks Exploiting Swarm Intelligence[J]. IEEE Wireless Communications,2022,29(4):10-17.
[13] YANG B,CAO X L,YUEN C,et al. OffloadingOptimization in Edge Computing for Deep LearningEnabled Target Tracking by InternetofUAVs[J]. IEEEInternet of Things Journal,2021,8(12):9878-9893.
[14] MIAO Y M,HWANG K,WU D,et al. Drone Swarm PathPlanning for Mobile Edge Computing in Industrial Internetof Things[J]. IEEE Transactions on Industrial Informatics,2022,19(5):6836-6848.
[15] FARACI G,GRASSO C,SCHEMBRA G. Design of a 5GNetwork Slice Extension with MEC UAVs Managed withReinforcement Learning [J]. IEEE Journal on SelectedAreas in Communications,2020,38(10):2356-2371.
[16] GANGAKHEDKAR S,CAO H W,ALI A R,et al. Use Cases,Requirements and Challenges of 5G Communication forIndustrial Automation[C]∥2018 IEEE International Conference on Communications Workshops (ICC Workshops).Kansas City:IEEE,2018:1-6.
[17] MA X D,SU Z,XU Q C,et al. Edge Computing and UAVSwarm Cooperative Task Offloading in Vehicular Networks[C]∥2022 International Wireless Communications andMobile Computing (IWCMC). Dubrovnik:IEEE,2022:955-960.
[18] CHEN J R,ZHANG Q X,FENG Z Y. Timeliness Analysisof Servicedriven Collaborative Mobile Edge Computing inUAV Swarm[C]∥2019 IEEE Globecom Workshops (GCWkshps). Waikoloa:IEEE,2019:1-6.
[19] ZHANG Q X,CHEN J R,JI L,et al. Response Delay Optimization in Mobile Edge Computing Enabled UAVSwarm[J]. IEEE Transactions on Vehicular Technology,2020,69(3):3280-3295.
[20] WU W,ZHOU F H,WANG B Y,et al. Unmanned AerialVehicle Swarmenabled Edge Computing:Potentials,Promising Technologies,and Challenges [J ]. IEEEWireless Communications,2022,29(4):78-85.
[21] SAVKIN A V,HUANG C,NI W. Joint MultiUAV PathPlanning and LoS Communication for Mobileedge Computing in IoT Networks with RISs [J]. IEEE Internet ofThings Journal,2023,10(3):2720-2727.
[22] HE Y J,GAN Y H,CUI H X,et al. Fairnessbased 3DMultiUAV Trajectory Optimization in MultiUAVassistedMEC System[J]. IEEE Internet of Things Journal,2023,10(13):11383-11395.
[23] YOU W J,DONG C,WU Q H,et al. Joint Task Scheduling,Resource Allocation,and UAV Trajectory UnderClustering for FANETs[J]. China Communications,2022,19(1):104-118.
[24] SHEN Y,DONG C,QU Y B,et al. Experimental Resultsof Federated Learning in Unmanned Aerial Vehicle Swarm[C ]∥ 2021 International Conference on SpaceAirGround Computing (SAGC ). Huizhou:IEEE,2021:163-164.
[25] SHEN Y,QU Y B,DONG C,et al. Joint Training and Resource Allocation Optimization for Federated Learning inUAV Swarm[J]. IEEE Internet of Things Journal,2023,10(3):2272-2284.
[26] SONG Y X,WANG T S,WU Y,et al. NonorthogonalMultiple Access assisted Federated Learning for UAVSwarms:An Approach of Latency Minimization [C ]∥2021 International Wireless Communications and MobileComputing (IWCMC). Harbin:IEEE,2021:1123-1128.
[27] WEN W L,JIA Y J,XIA W C. Joint Scheduling and Resource Allocation for Federated Learning in SWIPTenabled Micro UAV Swarm Networks[J]. China Communications,2022,19(1):119-135.
[28] XIAO Y,YE Y,HUANG S C,et al. Fully DecentralizedFederated Learningbased Onboard Mission for UAVSwarm System[J]. IEEE Communications Letters,2021,25(10):3296-3300.
[29] LIU Y,YUAN X,XIONG Z,et al. Federated Learning for6G Communications:Challenges,Methods,and Future Directions [J ]. China Communications,2020,17 (9 ):105-118.
[30] DANGNGOC H,NGUYEN D N,HOVAN K,et al.Secure Swarm UAVassisted Communications with Cooperative Friendly Jamming [J]. IEEE Internet of ThingsJournal,2022,9(24):25596-25611.
[31] MIAO J S,LI H R,ZHENG Z Y,et al. Secrecy EnergyEfficiency Maximization for UAV Swarm Assisted Multihop Relay System:Joint Trajectory Design and Power Control[J]. IEEE Access,2021,9:37784-37799.
[32] WANG X X,FENG W,CHEN Y F,et al. UAV Swarmenabled Aerial CoMP:A Physical Layer Security Perspective[J]. IEEE Access,2019,7:120901-120916.
[33] NNAMANI C O,KHANDAKER M R A,SELLATHURAIM. Secrecy Rate Maximization with Gridded UAV SwarmJamming for Passive Eavesdropping [C ]∥ 2021 IEEEGlobal Communications Conference (GLOBECOM). Madrid:IEEE,2021:1-6.
[34] LIU Y W,QIN Z J,ELKASHLAN M,et al. NonorthogonalMultiple Access for 5G and Beyond [J]. Proceedings ofthe IEEE,2017,105(12):2347-2381.
[35] LIANG S,FANG Z Y,SUN G,et al. Reducing Hoveringand Motion Energy Consumptions for UAVenabled Collaborative Beamforming[C]∥2022 IEEE Symposium onComputers and Communications (ISCC). Rhodes:IEEE,2022:1-7.
[36] NEW W K,LEOW C Y,NAVAIE K,et al. Application ofNOMA for Cellularconnected UAVs:Opportunities andChallenges [J ]. Science China Information Sciences,2021,64:140302.
[37] HABACHI O,ADJIF M A,CANCES J P. Fast UplinkGrant for NOMA:A Federated Learning Based Approach[C]∥International Symposium on Ubiquitous Networking.Limoges:Springer,2019:96-109.
[38] SUN H J,MA X,HU R Q. Adaptive Federated Learningwith Gradient Compression in Uplink NOMA [J]. IEEETransactions on Vehicular Technology,2020,69 (12 ):16325-16329.
[39] ZHU J Y,WANG J H,HUANG Y M,et al. Resource Allocation for Hybrid NOMA MEC Offloading [J ]. IEEETransactions on Wireless Communications,2020,19(7):4964-4977.
[40] WU Y,NI K J,ZHANG C,et al. NOMA Assisted Multiaccess Mobile Edge Computing:A Joint Optimization ofComputation Offloading and Time Allocation [J]. IEEETransactions on Vehicular Technology,2018,67 (12 ):12244-12258.
[41] FENG W M,TANG J,WU Q Q,et al. Resource Allocationfor Power Minimization in RISassisted MultiUAV Networks with NOMA[J]. IEEE Transactions on Communications,2023,71(11):6662-6676.
[42] BASAR E,DI RENZO M D,ROSNY J D,et al. WirelessCommunications Through Reconfigurable Intelligent Surfaces[J]. IEEE Access,2019,7:116753-116773.
[43] LU H Q,ZENG Y,JIN S,et al. Enabling Panoramic Fullangle Reflection via Aerial Intelligent Reflecting Surface[C]∥2020 IEEE International Conference on Communications Workshops (ICC Workshops ). Dublin:IEEE,2020:1-6.
[44] SHANG B D,SHAFIN R,LIU L J. UAV SwarmenabledAerial Reconfigurable Intelligent Surface [EB / OL ].(2021-03-10)[2023-08-15]. https:∥arxiv. org / abs /2103. 06361.
[45] TEGICHO B E,BOGALE T E. RIS Assisted MIMO UAVSwarm Communication:Channel Capacity Margin Analysis[C]∥ 2022 IEEE 13th Annual Ubiquitous Computing,Electronics & Mobile Communication Conference (UEMCON). New York:IEEE,2022:0347-0351.
[46] NGUYEN K K,KHOSRAVIRAD S R,COSTA D B D,etal. Reconfigurable Intelligent Surfaceassisted MultiUAVNetworks:Efficient Resource Allocation with Deep Reinforcement Learning[J]. IEEE Journal of Selected Topicsin Signal Processing,2021,16(3):358-368.
[47] SUN G,LI J H,WANG A M,et al. Collaborative Beamforming for UAV Networks Exploiting Swarm Intelligence[J ]. IEEE Wireless Communications,2022,29 (4 ):10-17.
[48] SUN G,ZHENG X Y,SUN Z M,et al. UAVenabledSecure Communications via Collaborative Beamformingwith Imperfect Eavesdropper Information[J]. IEEE Transactions on Mobile Computing,2023,23(4):3291-3308.
[49] MOHANTI S,BOCANEGRA C,MEYER J,et al.Airbeam:Experimental Demonstration of DistributedBeamforming by a Swarm of UAVs[C]∥2019 IEEE 16thInternational Conference on Mobile Ad Hoc and SensorSystems (MASS). Monterey:IEEE,2019:162-170.
[50] HART P E,NILSSON N J,RAPHAEL B. A Formal Basisfor the Heuristic Determination of Minimum Cost Paths[J]. IEEE Transactions on Systems Science and Cybernetics,1968,4(2):100-107.
[51] ZU W,FAN G L,GAO Y,et al. MultiUAVs Cooperative PathPlanning Method Based on Improved RRT Algorithm[C]∥2018 IEEE International Conference on Mechatronics and Automation (ICMA). Changchun:IEEE,2018:1563-1567.
[52] XU J,GUO Q,XIAO L,et al. Autonomous DecisionmakingMethod for Combat Mission of UAV Based on Deep Reinforcement Learning[C]∥2019 IEEE 4th Advanced Information Technology,Electronic and Automation ControlConference (IAEAC). Chengdu:IEEE,2019:538-544.
[53] BUTENKO S,MURPHEY R,PARDALOS P M. CooperativeControl:Models,Application and Alogorithms [M]. Noida:Kuwer Academic,2003.
[54] BRAND M,MASYDA M,WEHNER N,et al. Ant ColonyOptimization Algorithm for Robot Path Planning [C]∥2010 International Conference on Computer Design andApplications. Qinhuangdao:IEEE,2010:436-440.
[55] MOU Z Y,ZHANG Y,GAO F F. Deep ReinforcementLearning Based Threedimensional Area Coverage withUAV Swarm[J]. IEEE Journal on Selected Areas in Communications. 2021,39(10):3160-3176.
[56] WANG S,HOSSEINALIPOUR S,GORLATOVA M,et al.UAVassisted Online Machine Learning over MultitieredNetworks:A Hierarchical Nested Personalized FederatedLearning Approach [J]. IEEE Transactions on Networkand Service Management,2023,20(2):1847-1865.
[57] PUENTECASTRO A,RIVERO D,PAZOS A,et al. A Review of Artificial Intelligence Applied to Path Planning inUAV Swarms [J]. Neural Computing and Applications,2022,34:153-170.
[58] LEI L,SHEN G Q,ZHANG L J,et al. Toward IntelligentCooperation of UAV Swarms:When Machine LearningMeets Digital Twin [J]. IEEE Network,2021,35 (1 ):386-392.
[59] 李斌,劉文帥,費澤松. 面向空天地異構網絡的邊緣計算部分任務卸載策略[J]. 電子與信息學報,2022,44(9):3091-3098.
[60] 李斌,彭思聰,費澤松. 基于邊緣計算的無人機通感融合網絡波束成形與資源優化[J]. 通信學報,2023,44(9):228-237.
作者簡介
李 苗 女,(1997—),碩士研究生。主要研究方向:無人機通信、機器學習應用。
何茂霖 男,(2001—),碩士研究生。主要研究方向:無人機通信、機器學習應用。
羅俊松 男,(1972—),碩士,副教授,碩士生導師。主要研究方向:大數據技術、優化理論與強化學習及其應用。
寧 進 女,(1991—),博士,副研究員,碩士生導師。主要研究方向:無人機信號異常檢測、數據挖掘。
胡艷梅 女,(1986—),博士,副教授,碩士生導師。主要研究方向:社會計算、復雜網絡分析、數據挖掘與機器學習。
(*通信作者)多 濱 男,(1982—),博士,教授,碩士生導師。主要研究方向:無人機通信、凸優化理論、機器學習應用。
基金項目:國家自然科學基金(62172060 );四川省科技計劃項目(2023YFQ0092,2022YFQ0017)
