仿蜈蚣式輸料管道磨損檢測技術研究
2024-07-11 04:15:07賈宏杰張志萬姜辛馬海飛高亮王思宇
有色冶金設計與研究 2024年3期
賈宏杰 張志萬 姜辛 馬海飛 高亮 王思宇

〔摘 要〕針對精礦輸料管、礦漿管道磨損嚴重、磨損時不易檢測的現狀,基于仿生學技術以綠色高效、低成本為設計理念,結合蜈蚣的軀體構造和運動特點,設計了一種仿蜈蚣式管道檢測儀。通過對檢測儀進行統一控制系統設計、分動并聯式設計以及模塊化設計,完成了總體的設計方案。該系統地設計了仿蜈蚣式管道檢測儀的結構和布局,并介紹了工作原理,通過運動學理論計算得出了檢測儀有獨立的運動特性。利用ADAMS運動仿真軟件,對檢測儀進行運動學仿真分析,分析結果表明:檢測儀動態性能良好,運行平穩,設計合理。對仿蜈蚣式管道檢測儀進行樣機制造,驗證了檢測儀結構的合理性和運動的穩定性。
〔關鍵詞〕仿蜈蚣式;輸料管;檢測儀;動力學仿真;樣機制造
中圖分類號:TH132? ? 文獻標志碼:B? 文章編號:1004-4345(2024)03-0042-05
Research on Wear Detection Technology of Centipede-like Material Conveying Pipeline
JIA Hongjie, ZHANG Zhiwan, JIANG Xin, MA Haifei, GAO Liang, WANG Siyu
(Jinchuan Group Tonggui Co., Ltd., Jinchang, Gansu 737100, China)
Abstract? In response to the current situation of serious wear and difficult detection of concentrate conveying pipe and slurry pipe, according to the bionics-based technology, taking green and high efficiency and low cost as design concept and combing with the body structure and movement characteristics of centipedes, a centipede-like pipe detector is designed. The overall design plan has been completed by the design of the unified control system, split parallel design, and a modular design of the detector. In this paper, the structure and layout of a centipede-like pipeline detector are systematically designed, and its working principle is presented. It is calculated by kinematic theory that the detector has independent motion characteristics. The kinematic simulation analysis is conducted on the detector by using ADAMS motion simulation software. The analysis results show that the detector had good dynamic performance, stable operation, and reasonable design. The rationality of the detector structure and the stability of its motion are verified by manufacturing the prototype of the centipede-like pipeline detector.
Keywords? centipede-like style; material conveying pipe; detector; dynamic simulation; prototype manufacture
收稿日期:2023-10-14
作者簡介:賈宏杰(1974—),男,工程師,主要從事冶煉生產技術工作。
仿生學是一門根據模擬生物系統的結構、行為以及相互作用,為工程技術提供新的設計思想、工作原理和系統構成的技術科學。在冶煉領域中,通過仿制天然材料或利用生物學原理,設計和制造出具有生物功能或生物活性的材料(具有天然材料所不具備的超常物理特性),用以替換當代冶煉工業中常見的鋼鐵﹑橡膠和陶瓷等材料,從一定程度上提升了現有材料﹑工具以及設備的性能指標;同時還借鑒生物在信息感知和運動方面的特性,研制出新型信息傳遞裝置,提高了信號的采集精度、廣度,擴大了適用范圍。該技術對于冶煉生產狀態的實時監測與控制水平的提高、大數據處理能力和智能化水平的提高也具有很大的優勢。
精礦輸送管道及礦漿輸送管道在實際生產中由于輸送介質壓力大小及輸送管線布置不同導致管道內磨損程度不一樣,加之輸送物料的沉積導致管道壁厚不一致,影響檢測數據的準確性。本文基于仿生學技術與設計方法,通過分析蜈蚣的軀體結構和運動特點,研制出一種新型的仿蜈蚣式檢測儀。以下擬通過對該檢測儀總體設計思路、工作原理進行理論分析,證明其有獨立的運動特性;再通過三維仿真軟件ADAMS對檢測儀進行運動學仿真和樣機制造,驗證該檢測儀結構的合理性和運動的穩定性。
1?? 仿蜈蚣式檢測儀設計
1.1? 總體方案設計
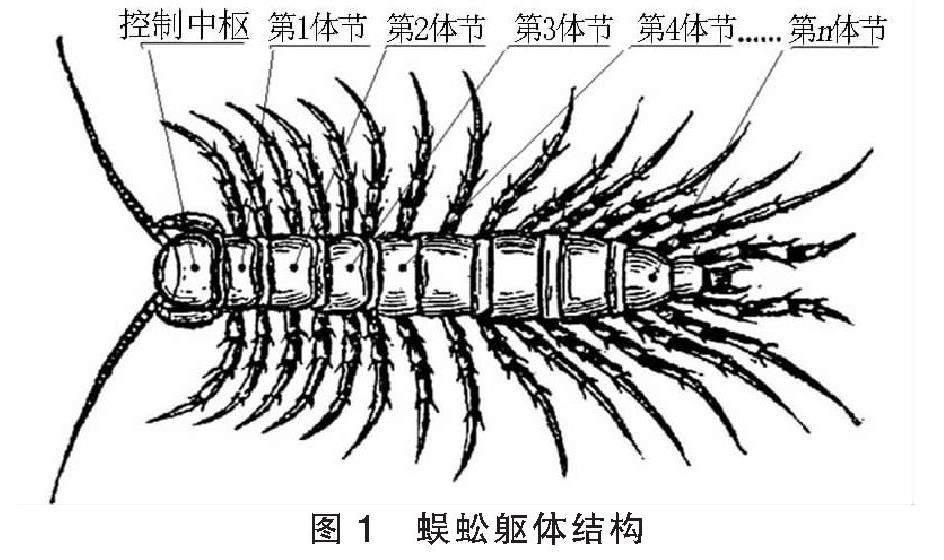
蜈蚣屬于陸生節肢動物,每一對足都有一個獨立的運動單元和獨立的神經節,每對神經節又通過發出神經來調節身體活動。該結構具有很高的獨立運作能力,可以適應各種環境。蜈蚣軀體結構如圖1所示。
根據蜈蚣軀體結構,模擬其運動的靈活性,本文提出了以綠色設計為理念、并行設計和模塊化設計為核心的設計方案。該設計基于蜈蚣的軀體構造和運動特點,以蜈蚣的控制中樞為檢測儀的控制系統,每一體節為一組模塊,形成一種用于測量輸料管內徑的、可拆卸性好、可維護性高、耗材少、獨立性好、模塊化程度高,對環境友好,又可以循環使用的仿生設備。其總體方案示意如圖2所示。
1.2? 整體結構設計
基于上述總體方案,該檢測儀的結構設計如圖3所示。
仿蜈蚣式檢測儀由一個控制系統(圖中未畫出)、若干個測量模塊、上護帽、下堵頭以及外殼體組成。每組模塊的結構與蜈蚣體節相似,除了空間布局不同,其內部結構完全一致。當某一模塊發生故障時,其他模塊仍然可以正常運行。每一組模塊中的檢測臂結構、功能完全相同,且多采用標準件,這保證了該結構的高度互換性,在滿足正常功能的前提下,可以提高檢測儀的現場適用性和降低維修成本。
1.3? 檢測模塊空間布局
根據總體結構設計,檢測儀設置有3組獨立的檢測臂,每一組檢測臂都可獨立運動,互不影響,故而解決了傳統檢測儀的檢測臂只能同時伸展和收縮的問題,提高了測輸料管內徑的時效。多組檢測臂的安裝極其方便,采用分動式設計,即同一外殼體內放置多組檢測臂,按同軸放置在外殼體內部的相應位置,并固定安放。各組檢測臂都以固定的角度在空間中錯開安裝,錯開角度度數為180/n(n表示獨立檢測臂的組數)。檢測臂安裝的組數,則由工程實際要求具體來定。該檢測臂空間位置布局如圖4所示。
1.4? 單組檢測臂結構設計
單組檢測臂的設計其結構如圖5所示。檢測臂內的運動模塊主要由步進電機、聯軸器、絲杠、推桿、傳感器固定座以及步進電機固定座等組成。
檢測臂由步進電機驅動,通過聯軸器將扭矩傳遞給絲杠。當絲杠轉動時,由于頂端推桿固定座是固定的,底端推桿固定座將水平移動,以此來推動推桿,使得傳感器固定座在徑向方向張開或收縮。
1.5? 防護固定裝置設計
防護固定裝置設計如圖6所示。該防護固定裝置主要由外殼體、上護帽以及下堵頭3部分組成。外殼體表面設置有若干個缺口,每1組缺口都互成180 °設置,有幾組獨立的檢測臂便設置與之相對應的缺口,缺口的空間角度的位置設置和前面所述檢測臂角度設置一樣。該缺口可供檢測臂從殼體內部向外伸展并向內收縮,從而避免了檢測儀在下放和上提時,機體與管壁發生碰撞而發生損壞。
2?? 檢測儀工作原理及運動學分析
2.1? 檢測儀工作原理
檢測儀的工作流程圖見圖7。
當檢測儀開始檢測時,將檢測臂調整為收縮狀態,下放至套管內。在下放的過程中,步進電機始終處于未工作的狀態。當下放至所需要檢測的位置時,相對應的驅動器驅動步進電機開始工作,步進電機帶動絲杠轉動,底端推桿固定座向頂端推桿固定座方向移動,從而檢測臂通過外殼體表面的缺口伸展出來,并繼續運動,直到傳感器底座觸碰到套管內壁時,限位開關接收到信號并將信號發送給控制器,控制器將信號發送給驅動器,驅動器控制電機停止工作,此時開始記錄數據。在該位置測量完畢后,控制器發出信號給驅動器,驅動器控制步進電機反轉,檢測臂收縮,在底端推桿固定座下降至底部觸碰到底端限位開關時,限位開關將信號反饋給控制器,控制器控制步進電機停止工作,檢測儀回到初始時的收縮狀態。同理,如需再次進行測量,只需要將檢測儀上提或下放到需要測量的下一個位置,重復以上動作,再次記錄數據。如不需要再次進行測量,只需要將檢測儀上提至初始位置,測井完畢。
2.2? 檢測儀運動學計算
為了保證該檢測儀具有確定的運動,需計算該系統的自由度。推靠系統運動見圖8。
由圖8可知,此系統具有 5 個活動構件,6 個低副,1 個高副,故機構的自由度為:
F=3n-(2Pi+Ph)。
式中:n為桿件數,Pi為低副,Ph為高副。計算得:F=2。
由機械原理可知,如果系統的自由度數目等于系統的原動件數目,則系統會有確定的運動。如果系統沒有滿足這個條件,當系統的自由度數目小于系統的原動件數目,系統最薄弱的構件將會被損壞。當系統的自由度數目大于系統的原動件數目,則系統的運動會完全不確定。但本次設計中檢測儀有兩種運動狀態,即推靠系統收縮運動狀態和檢測運動狀態,由于傳感器固定座只會以豎直的姿態向其他方向運動,而且不會進行轉動,因此對傳感器固定座豎直姿態的約束相當于1個低副,因此打開運動狀態的自由度為:F=1。
測量過程中,電機停止運動,絲桿也停止轉動,系統的活動構件變為了4個,5個低副,1個高副,因此,測量運動狀態的自由度為:F=3×4-(2×5+1)=1。
綜上所述,該分動式六臂檢測儀在收縮運動狀態和檢測運動狀態都有確定的運動。
檢測臂在收縮狀態下,如圖9(a)所示。已知AB=
A'B'=CD=C'D',BC=B'C',設初始位置時,AD之間的距離為Sb(實際測量可得出Sb=300 mm),傳感器固定座兩中心孔之間的距離BC=B'C'=hv,兩推桿AB =CD=A'B'=C'D'=b(實際測量b=150 mm),從初始位置開始到測量狀態完畢時,螺母移動的距離DD'=l。
檢測臂在檢測過程中的運動簡圖如圖9(b)所示,已知B'C'=E'F',A'B'=C'D',B'F'=C'E',A'F'= D'E',設檢測狀態時,沿絲杠中心兩推桿中心孔之間的距離A'D' =Se,傳感器固定座兩中心孔之間的距離B'C'=E'F'=hv(實際測量得hv=30 mm),固定座中心孔到絲杠之間的距離B'F' = C'E'=a。本次設計可以檢測的輸料管直徑的范圍為110~330 mm。
圖9? 檢測臂收縮、打開簡化示意
步進電機是一種將電脈沖轉換為角位移的執行機構,通過控制脈頻率來控制電機的轉速,可以通過脈沖的個數來獲得電機所運行的時間,當選擇了步進電機后,它的細分倍數和固有步進角均為已知,故通過計算可得步進電機軸的轉速為:
n=f×60/[(306/T)×X]。
式中:n為步進電機轉速,rad/min;f為控制電機的脈沖頻率,Hz;T為步進電機的步進角,(°);X為步進電機的細分倍數。
絲杠螺母之間的傳動,主要實現旋轉運動與直線運動之間的相互轉換,主要的作用是用于機構之間運動形式的傳遞。已知電機通過聯軸器帶動絲杠旋轉,中間再無其他傳動部件,因此,電機軸的轉速也就等于絲杠的轉速,電機所運行的時間即等于絲杠轉動的時間,已知絲杠的螺距為,則可求得螺母在絲杠上所移動的距離為:
l=n×p×t/60。
式中:t為絲杠轉動的時間,s;為絲杠的螺距,p=4 mm。代入以上數據即可得出輸料管內徑d的大小。
A'F'=150-0.5×l ;
l=f×t×T/2 880 ;
BF=;
d=2× BF。
2.3? 檢測儀運動仿真分析
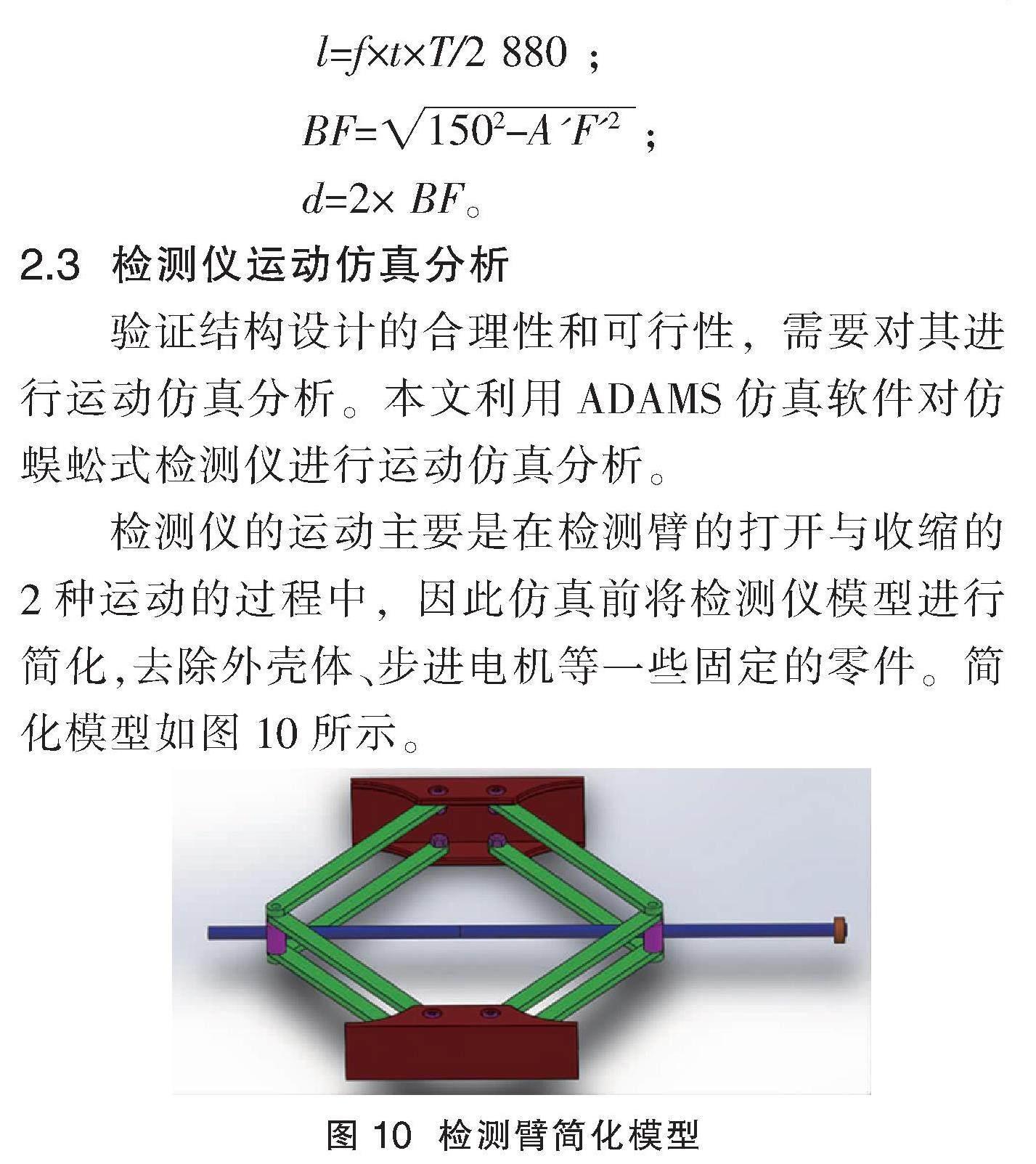
驗證結構設計的合理性和可行性,需要對其進行運動仿真分析。本文利用ADAMS仿真軟件對仿蜈蚣式檢測儀進行運動仿真分析。
檢測儀的運動主要是在檢測臂的打開與收縮的2種運動的過程中,因此仿真前將檢測儀模型進行簡化,去除外殼體、步進電機等一些固定的零件。簡化模型如圖10所示。
根據檢測儀的工作原理,在檢測臂絲桿的旋轉副上添加運動函數為:
Function=3 000 d×sin(×t)。
在此驅動函數的驅動下,設置仿真時間為t=5 s,step=100進行仿真。其ADAMS設置結果如圖11所示。
對仿真結果進行求解,得出運動螺母、傳感器底座的位移曲線,如圖12、圖13所示。運動螺母和傳感器支座的速度曲線如圖14、圖15所示。
由位移—時間、速度—時間曲線可見,當步進電機驅動絲桿螺母,同時帶動推桿及傳感器底座運動時,位移和速度平穩變化,表明在此過程中零部件傳動平穩,沒有速度的急速變化帶來的沖擊,驗證了設計的合理性及符合實際工作的要求。
3?? 檢測儀樣機試驗情況分析
為了完成該裝置的原理設計及通過性檢驗,按照實際大小的 1:1制作了檢測儀的一段測量模塊,如圖16所示。在平面狀態下,對該檢測儀進行簡單的運動測試,檢查運動過程中是否存在干涉等現象。再進行管道內徑測量實驗與調試,通過對檢測儀在不同形狀、不同材質的管道中內徑的測量,對越障車運動情況進行校驗及改進。經過實際調試,檢測儀運轉情況良好,符合預期設計要求,驗證了檢測儀結構的合理性和運動的穩定性。
4?? 結論
利用仿生學技術,結合蜈蚣的軀體特征和運動特性,對檢測儀總體方案進行設計。按照總體的設計方案,建立了仿蜈蚣式檢測儀的三維模型。通過對檢測儀的工作原理進行介紹,利用運動學理論得出了檢測儀運動具有獨立性。通過ADAMS三維仿真軟件對檢測儀的運動學進行分析,以及檢測儀樣機制造的實踐檢驗,驗證了檢測儀結構的合理性和運動的穩定性。綜上,該檢測儀的動態性能良好,運行平穩,設計合理,在精礦輸料管、礦漿管道磨損嚴重、磨損時能夠實時地測量套管內徑來反映管道的磨損、腐蝕、破損及其他變形情況。
參考文獻
[1] 張瑜都,孔文瓊.噴漿材料管道輸送的三維數值模擬[J].工業加熱,2018,47(4):36-37.
[2] 馬濤. 一種新型柔性仿人機械手的優化設計研究[D].天津:河北工業大學,2020.
[3] 方誌.氣力輸送系統變徑管道系統設計的研究[J].建設機械技術與管理,2022,35(4):54-56.
[4] 席文奎,彭蔣偉,姜辛,等. 一種分動式多臂井徑測井儀:CN111287736A[P]. 2020-06-16.
[5] 席文奎,姜辛,王燕玲.一種自動旋轉式井徑測井儀:CN111411940A[P].2020-05-14.
[6] 黃芬霞,靳世平.管道內顆粒氣力輸送的研究現狀與熱點分析[J].中國粉體技術,2017,23(5):87-92.
[7] 王曉品,林偉強,謝如楠.自適應綠色節能管控系統設計[J].電子制作,2020(17):3-5.
[8] 李振. 火電廠中速磨煤機石子煤負壓氣力輸送系統設計[D].北京:華北電力大學,2012.
[9] 任濤,張飛,張春琳,等.新型分動式六臂檢測儀推靠系統運動學及動力學分析[J].機械傳動,2019,43(6):117-124.
[10] 張飛.分動式六臂檢測儀設計及推靠系統性能研究[D].西安:西安石油大學,2019.
[11] 董中華.氣力輸送系統及其設計[J].化工裝備技術,2016,37(3):5-8.
[12] 藺茂輝.氣力輸送機管道材料對輸送能耗的影響[J].技術與市場,2014,21(6):96-97.
[13] 劉洛航. 豬舍飼料氣力輸送系統設計及管道沖蝕磨損研究[D].南昌:江西農業大學,2021.