力位綜合系數調節方法研究
2024-06-17 07:33:48付曉徐銳良閆祥海徐立友
中國農機化學報 2024年6期
付曉 徐銳良 閆祥海 徐立友
摘要:針對力位綜合調節中綜合系數的取值問題,提出一種綜合系數自動調節方案。通過Matlab/simulink研究不同耕作條件下綜合系數與耕深的關系,依據結果建立以耕作阻力為開關的調節方法;并基于牽引阻力的計算公式設計模擬耕作阻力波動的隨機信號模塊。為驗證所設計綜合系數調節方法的控制效果,采用綜合系數取值0.5的耕深控制策略與其進行仿真對比。結果表明:該方案能夠隨著耕作阻力的改變及時地對綜合系數進行調整,具有較好的環境適應性,最大超調量相較于另一調節方案同比降低75.56%;保證耕深在合理范圍的同時兼顧發動機負荷穩定性。
關鍵詞:力位綜合調節;綜合系數;耕作阻力;牽引阻力;耕深均勻;自動控制
中圖分類號:S219.032.4
文獻標識碼:A
文章編號:2095-5553 (2024) 06-0037-05
收稿日期:2022年8月16日
修回日期:2022年10月17日
*基金項目:河南省科技攻關項目(212102210328)
第一作者:付曉,女,1998年生,河南洛陽人,碩士研究生;研究方向為拖拉機耕深控制。E-mail: 1286583906@qq.com
通訊作者:徐銳良,男,1966年生,河南洛陽人,副教授,碩導;研究方向為車輛設計與制造。E-mail: lyxrl@163.com
Study on adjustment method of force-position comprehensive coefficient
Fu Xiao, Xu Ruiliang, Yan Xianghai, Xu Liyou
(College of Vehicle and Traffic Engineering, Henan University of Science and Technology, Luoyang, 471000, China)
Abstract: Aiming at the problem of the value of comprehensive coefficient in comprehensive adjustment of force position, an automatic adjustment scheme of comprehensive coefficient was proposed. The relationship between comprehensive coefficient and tillage depth under different tillage conditions was studied by Matlab/simulink. According to the results, the regulation method with tillage resistance as switch was established. Based on the formula of traction resistance, a random signal module was designed to simulate the fluctuation of tillage resistance. In order to verify the control effect of the designed comprehensive coefficient adjustment method, the tillage depth control strategy with the comprehensive coefficient of 0.5 was used for simulation comparison. The results show that the scheme can adjust the comprehensive coefficient in time with the change of tillage resistance, and has good environmental adaptability. The maximum overshoot is reduced by 75.56% compared with the other scheme. The stability of engine load is also taken into account while the ploughing depth is in a reasonable range.
Keywords: comprehensive adjustment of force and position; comprehensive coefficient; tillage resistance; tractive resistance; even tillage depth; automatic control
0 引言
由于農機作業環境的復雜多變性,傳統的機械式液壓懸掛系統已無法滿足農業現代化需求,電液懸掛控制技術應運而生。相比于傳統的懸掛系統,電液懸掛系統的耕深控制方式更加靈活,PID控制、模糊控制、神經網絡等控制算法也開始應用于控制系統,耕深的控制精度和系統響應速度都有了很大提升[1, 2]。在針對力位綜合調節的研究中,綜合系數大多是由人工預先設定,探討不同綜合系數時系統的耕深控制性能[3]。近些年,也有學者研究了綜合系數的自動控制算法,席鑫鑫等建立了力位綜合控制的數學模型,結合BP神經網絡設計了綜合度系數的自動選取系統;但是目前對神經網絡期望值的預測及算法應用都還不夠成熟。王素玉等[4]研究了綜合系數與土壤比阻之間的關系,基于土壤比阻與綜合系數的關系取值算法,實現了綜合系數的自動控制,然而在耕深均勻性上表現欠佳,仍有提升的空間。
本文在已有研究的基礎上,搭建拖拉機電液懸掛系統的仿真模型,探索綜合系數取值與耕作阻力之間的關系,設計自調節綜合系數的力位綜合控制策略(以下簡稱阻力式自調節系數法),并將其與綜合系數采用固定值的力位綜合調節進行對比分析。
1 調節原理及控制策略
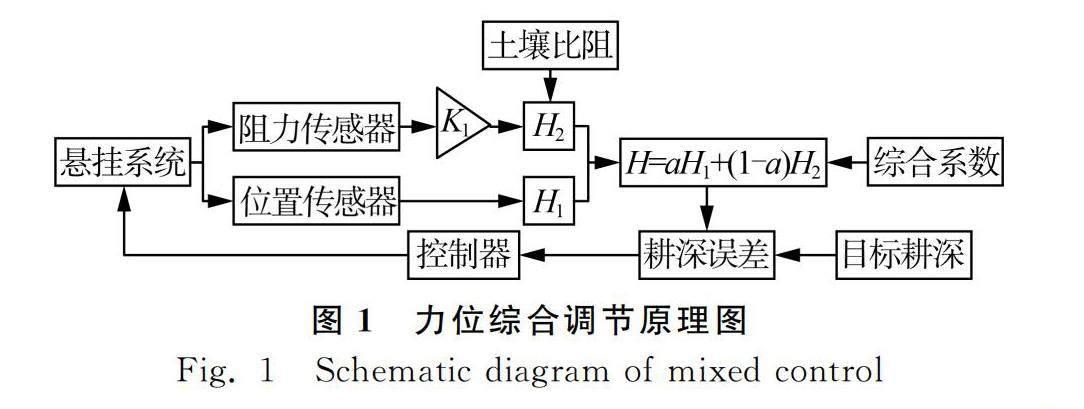
1.1 調節原理
懸掛系統力位綜合調節原理簡圖如圖1所示。目標耕深由駕駛員輸入,K1為常數項;力、位傳感器檢測信號進行處理后得到對應耕深H2、H1,結合綜合系數a計算得到實際耕深,將其與目標耕深對比后產生耕深誤差,耕深誤差輸入控制器經判斷后輸出控制信號,從而控制懸掛系統令農具執行升降動作。綜合系數定義為位調節占力位綜合調節的比重,可以通過設定處于0~1之間的任何位置,代表了位調節在綜合調節中分配的比例[5]。位調節占比較大時可以獲得較好的耕深一致性,力調節占比較大時可以獲得較好的負荷穩定性,因此合理的設定綜合系數值對力位綜合調節具有重要意義。
1.2 控制策略
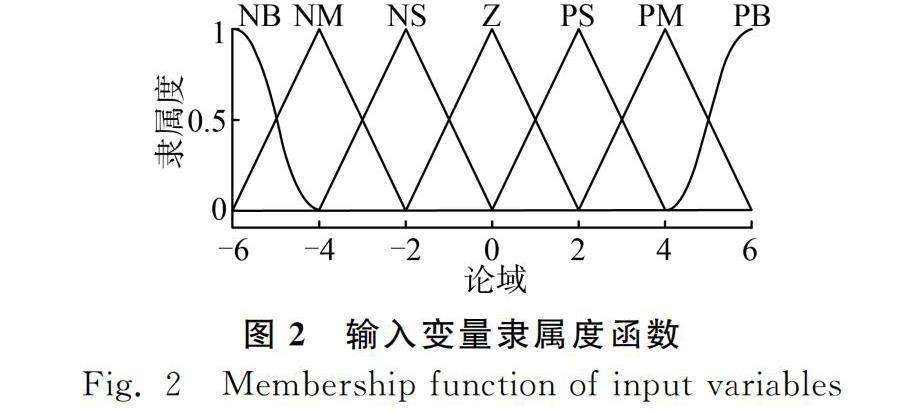
拖拉機懸掛系統在耕作過程受耕作環境和系統本身的影響,具有時變、擾動大、非線性強的特點,基于此本文選用模糊-PID控制器對懸掛系統進行耕深控制。模糊控制器采用雙輸入三輸出的模式,輸入為耕深誤差e及誤差變化率ec,輸出為PID的參數修正量Kp、Ki、Kd,輸入輸出的量化等級為7,離散論域均取為[-6,6],對應的模糊子集取為{NB,NM,NS,Z,PS,PM,PB}。
隸屬度函數曲線的形狀對模糊控制器的控制性能具有一定的影響。當輸入偏差波動較大時高斯函數對應的曲線調節較快效果較好,反之三角型曲線對應的調節較快、效果好一些[6];非均勻分布的隸屬度函數可以提高系統的抗干擾能力和輸出量的控制作用,達到快速控制系統偏差的目的[7-10],因此采用隸屬度函數如圖2和圖3所示。模糊控制規則是根據專家經驗和知識生成的,結合自整定原則[11, 12],建立的模糊控制規則如表1所示。
2 綜合系數與耕作阻力關系分析
2.1 模型搭建
拖拉機耕作區域相對靈活,在土地規模化經營的趨勢下,跨區作業將成為未來耕作模式的新常態。跨區作業就涉及耕作阻力的改變,為保證得到適合農作物生長的耕深,綜合系數應該能夠隨作業條件的改變進行調整。考慮到耕作阻力主要與農具參數、土壤、耕深有關;而農具參數為定值,只與制造有關,耕深為目標量,土壤的情況通常用土壤比阻來反映;因此基于研究土壤比阻與綜合系數間的關系設計阻力式自動調節綜合系數方法是可行的。為得到更為直觀的結果,假設在某一耕作環境時土壤比阻固定,懸掛模型采用傳遞函數的形式。前文已經對力位綜合調節原理及控制策略進行了闡述,結合建立的懸掛系統的數學模型,在Matlab/simulink中搭建的控制系統模型如圖4所示。圖中a、k分別代表綜合系數、土壤比阻。
2.2 仿真分析
已知綜合系數的取值范圍為0~1,為了分析綜合系數與土壤比阻的關系,應對土壤比阻的取值范圍進行限定。文獻[13]對不同的土壤數據進行采集并得到了相應的土壤比阻值,據此本文選取土壤比阻分別為25kN/m2、35kN/m2、45kN/m2、55kN/m2、65kN/m2、75kN/m2。在模型中設定綜合系數后對土壤比阻進行調整,得到了耕深響應曲線,選擇較有代表性的綜合系數分別為0.9與0.5時的曲線如圖5、圖6所示。
由圖5和圖6可知所設計模糊-PID控制策略的響應速度較好,均在1s內達到了穩定耕深,基本無超調。當土壤比阻較大時,若綜合系數選取不合適則耕深無法滿足作業要求,但綜合系數偏大可能會導致耕作阻力波動大,發動機負荷不穩定,甚至損傷發動機;因此在設計阻力式自調節系數法時應在符合發動機負荷的情況下盡量選用較大的綜合系數以保證耕深。
2.3 調整方案的設計
綜合系數的取值與耕作阻力之間的對應關系越精細,相應的耕深的控制效果越好,但是會提高系統響應時間;當耕作阻力較小時,綜合系數的取值在較大范圍都可以符合耕深要求,所以可以適當減少綜合系數的劃分等級,以考慮響應速度;當耕作阻力處于波動較大的區間時增加一個綜合系數取值,可以避免耕深產生較大波動。結合仿真結果以及文獻[4]對土壤比阻與綜合系數范圍關系的研究,制訂出綜合系數與耕作阻力之間的關系如表2所示。
依據綜合系數與阻力之間的關系在Matlab里設計出阻力式自調節系數法模塊后,為確保能根據耕作阻力輸出相應的綜合系數,對其進行了簡單的驗證。采用如圖7(a)所示的隨機信號模擬耕作阻力的改變,仿真6s后得到如圖7(b)所示的輸出信號。
3 試驗驗證
通過固定土壤比阻k的取值對綜合系數與阻力的關系進行了研究,然而在農耕作業過程中不同地區的土壤是存在差異的,因此設計了隨機信號以對土壤情況的變化進行模擬。拖拉機作業時農具受到的平均牽引阻力可以按照式(1)計算[14, 15],其中b與Z之積為拖拉機的作業幅寬,取為2m;不同的耕地土壤比阻k的波動范圍一般在25~75kN/m2。
PT=k·b·H·Z(1)
式中: b——單個鏵犁體寬度,cm;
H——耕深,cm;
Z——鏵犁數。
若直接以隨機信號的輸出模擬耕作阻力波動,就無法較好地反映耕作阻力與當前耕深之間存在的關系;因此假定作業幅寬與土壤比阻的乘積為系數K,結合對作業幅寬與土壤比阻的分析,可以得到K數值變化范圍為50~150;由于土壤比阻只與土壤有關,則牽引阻力與耕深之間就可以近似為線性的關系。采用隨機信號對系數K進行輸出,牽引阻力就表示為當前耕深與系數K的乘積,既可以用隨機數表達土壤的不規則變化,也兼顧了耕作阻力與當前耕深之間的關系。
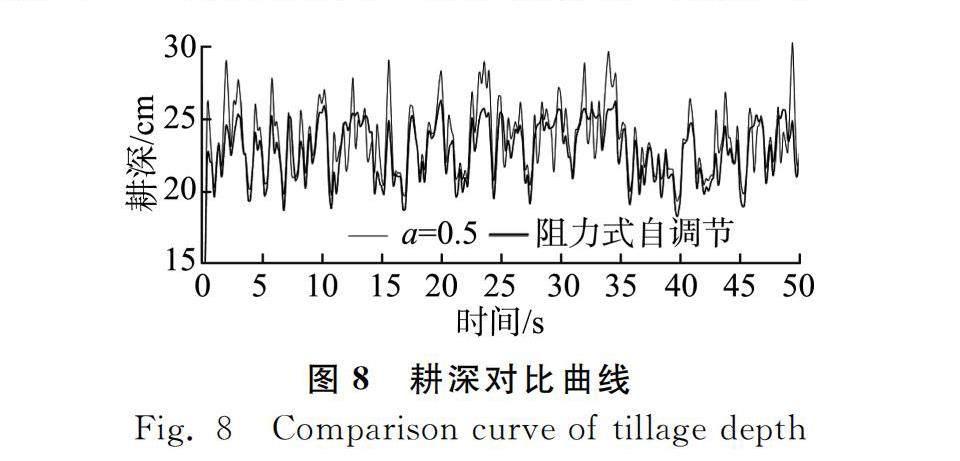
在Matlab/Simulink中搭建新的仿真模型,同時設計相應的綜合系數取值為0.5的模型作為對比,運行仿真50s,得到如圖8所示的耕深變化曲線。
由圖8可知,無論是阻力式自調節還是綜合系數取固定值0.5的耕深控制方案所達到的耕深主要在20~25cm范圍浮動;阻力式自調節的最大、最小耕深分別為26.3cm、16.8cm,a=0.5的調節方案的最大、最小耕深分別為30.3cm、18.2cm,由于仿真時針對土壤環境變化采用隨機信號輸出,其輸出值在大幅度波動時產生了耕深的超調;阻力式自調節、a=0.5調節方案的平均耕深分別為22.4cm、23.1cm,總體符合翻耕的耕深要求,且控制系統能較快地做出響應。
當耕作阻力較小,a=0.5的調節由于無法調整力、位調節所占的比例,產生了較大的耕深誤差,而阻力式自調節系統通過輸出較大的綜合系數將耕深穩定在25cm附近,最大超調量相較于a=0.5的調節方案同比降低75.56%;當耕作阻力適中時,由于阻力式自調節的本質也是對綜合系數的調整,此時控制系統輸出的綜合系數值也趨近于0.5,故兩種方案的耕深控制效果接近一致;當耕作阻力較大時,阻力式自調節方法的耕深下降量較a=0.5的調節更大一些,但是考慮到發動機的負荷工況,在耕深允許范圍內犧牲部分耕深,以保證阻力不會過大而損傷發動機也是可以接受的。
4 結論
1) 根據拖拉機懸掛系統的工作特點設計耕深誤差大時快速響應、誤差小時控制精度高的模糊-PID控制策略,在Simulink里建立模型并進行仿真后得到不同的耕作阻力時力調節、位調節占比與土壤阻力的關系,提出阻力式自調節系數法。
2) 分析耕作阻力與土壤比阻之間的關系,采用隨機信號設計耕作環境模擬模塊;將阻力式自調節系數法與綜合系數取值0.5的控制方式進行仿真對比,二者均在1s內達到穩定耕深,所設計方案在土壤阻力波動范圍大時耕深可以滿足作物的生長要求,耕深均勻性較好。
3) 阻力式自調節系數法將綜合系數的取值與實時耕作環境建立聯系,提高拖拉機耕作時的環境適應能力,對綜合系數的取值方法提供一種新思路,為實現真正意義上的力位綜合控制提供參考。
參 考 文 獻
[1]Shafaei S. M, Loghavi M, Kamgar S. A practical effort to equip tractor-implement with fuzzy depth and draft control system [J]. Engineering in Agriculture, Environment and Food, 2019, 12(2): 191-203.
[2]Timene A, Ngasop N, Djalo H. Tractor-implement tillage depth control using adaptive neuro-fuzzy inference system (ANFIS)[J]. Proceedings of Engineering and Technology Innovation, 2021(19): 53-61.
[3]Zhang W, Liu M, Xu L, et al. Simulation of hydraulic suspension system of electric tractor based on Matlab-AMESim [C]. Journal of Physics: Conference Series. IOP Publishing, 2021, 1903(1): 012003.
[4]王素玉, 劉站, 李瑞川, 等. 基于土壤比阻的大功率拖拉機變權重力位綜合控制研究[J]. 農業機械學報, 2018, 49(2): 351-357.
Wang Suyu, Liu Zhan, Li Ruichuan, et al. Variable weight force position mixed control of high-power tractor based on soil specific resistance [J]. Transactions of the Chinese Society for Agricultural Machinery, 2018, 49(2): 351-357.
[5]魯植雄, 郭兵, 高強. 拖拉機耕深模糊自動控制方法與試驗研究[J]. 農業工程學報, 2013, 29(23): 23-29.
Lu Zhixiong, Guo Bing, Gao Qiang. Study on auto control method and experiment for tractor depth based on fuzzy control [J]. Transactions of the Chinese Society of Agricultural Engineering, 2013, 29(23): 23-29.
[6]江玲玲, 張俊俊. 基于AMESim與Matlab/Simulink聯合仿真技術的接口與應用研究[J]. 機床與液壓, 2008(1): 148-149.
Jiang Lingling, Zhang Junjun. Interface and application research united simulation technique based on AMESim and Matlab/Simulink [J]. Machine Tool & Hydraulics, 2008, 36(1): 148-149.
[7]Soylu S, arman K. Fuzzy logic based automatic slip control system for agricultural tractors [J]. Journal of Terramechanics, 2021, 95: 25-32.
[8]江翠翠, 王佐勛. 模糊-PID控制在氣密性檢測壓力控制系統中的應用[J]. 齊魯工業大學學報, 2021, 35(3): 52-58.
Jiang Cuicui, Wang Zuoxun. Application of fuzzy-PID control in air tightness detection pressure control system [J]. Journal of Qilu University of Technology, 2021, 35(3): 52-58.
[9]賈玉文, 段曉, 張厚明, 等. 研究堆Mamdani型模糊控制器設計優化方法[J]. 原子能科學技術, 2021, 55(6): 1091-1097.
Jia Yuwen, Duan Xiao, Zhang Houming, et al. Design optimization method of Mamdani type fuzzy controller applied to research reactor [J]. Atomic Energy Science and Technology, 2021, 55(6): 1091-1097.
[10]商高高, 謝凌云, 季順靜. 拖拉機懸掛系統耕深自動控制策略的研究[J]. 中國農機化學報, 2016, 37(7): 136-140.
Shang Gaogao, Xie Lingyun, Ji Shunjing. Research on plowing depth automatic control for tractor hitch system [J]. Journal of Chinese Agricultural Mechanization, 2016, 37(7): 136-140.
[11]王述彥, 師宇, 馮忠緒. 基于模糊PID控制器的控制方法研究[J]. 機械科學與技術, 2011, 30(1): 166-172.
Wang Shuyan, Shi Yu, Feng Zhongxu. A method for controlling a loading system based on a fuzzy PID controller [J]. Mechanical Science and Technology for Aerospace Engineering, 2011, 30(1): 166-172.
[12]譚彧. 拖拉機液壓懸掛和加載系統性能研究[D]. 北京: 中國農業大學, 2004.
Tan Yu. The study of characteristics for hydraulichitch & loading system in tractor [D]. Beijing: China Agricultural University, 2004.
[13]劉站. 基于土壤比阻的大功率拖拉機電液懸掛控制系統設計與分析[D]. 青島: 山東科技大學, 2018.
Liu Zhan. Design and analysis of electro-hydraulic suspension control system for high power tractor based on soil specific resistivity [D]. Qingdao: Shandong University of Science and Technology, 2018.
[14]翟力欣. 犁體結構與工作參數對流變型土壤耕作阻力的影響研究[D]. 南京: 南京農業大學, 2011.
Zhai Lixin. Study on the effects of ploughs working and structure parameters on its resistance under rheological soil conditions [D]. Nanjing: Nanjing Agricultural University, 2011.
[15]呂杰. 農用拖拉機后懸掛液壓系統的控制研究[D]. 秦皇島: 燕山大學, 2016.
Lü Jie. Analysis of agricultural tractors rear hitch hydraulic control system [D].Qinhuangdao: Yanshan University, 2016.
DOI: 10.13733/j.jcam.issn.2095-5553.2024.06.008
單海勇, 嚴旖旎, 張晉, 等. 大豆—玉米帶狀復合種植耕種機械化研究進展[J]. 中國農機化學報, 2024, 45(6): 42-52
Shan Haiyong, Yan Yini, Zhang Jin, et al. Research progress on mechanization of soybean-corn belt composite planting [J]. Journal of Chinese Agricultural Mechanization, 2024, 45(6): 42-52