永磁同步電機模糊滑模無位置傳感器控制
2024-06-06 00:00:00禹聰康爾良
電機與控制學報 2024年1期
關鍵詞:永磁同步電機



摘"要:
針對滑模量在滑模面切換以及速度非線性變化而致使的系統抖振問題,提出一種超旋轉滑模模糊觀測器。滑模觀測器(SMO)存在的高頻抖振會對電機控制系統產生很大的影響,導致電機產生轉速波動和穩態誤差。為了削弱SMO的抖振問題,首先對滑模動態變量的趨近速度動態變化導致的抖振問題,通過引入模糊邏輯理論使得系統狀態量趨動速度智能化,設置模糊規則以達到智能動態化速度,以系統動態變量趨向切換面的距離與狀態量動態趨向速度為規則因子,動態智能化趨向速度;其次對系統變換函數導致的系統抖振,進一步采用連續函數F(s)代替不連續的sgn(s)符號函數。該方案有效削弱了系統的抖振問題,相較于SMO控制提高了系統的穩定性。
關鍵詞:永磁同步電機;無位置傳感器控制;滑模觀測器;模糊控制;高頻抖振;滑模控制
DOI:10.15938/j.emc.2024.01.009
中圖分類號:TM341
文獻標志碼:A
文章編號:1007-449X(2024)01-0087-08
Fuzzy sliding mode position sensorless control of permanent magnet synchronous motor
YU Cong1,2,"KANG Erliang1,2
(1.School of Electrical and Electronic Engineering, Harbin University of Science and Technology, Harbin 150080, China; 2.Engineering Technology Innovation Center of DirectDrive System in Colleges and Universities in Heilongjiang, Harbin 150080, China)
Abstract:
A super rotating sliding mode fuzzy observer was proposed to address the system chattering problem caused by the switching of sliding mode variables on the sliding mode surface and nonlinear changes in velocity. The highfrequency chattering in sliding mode observer (SMO) can have a significant impact on the motor control system, leading to speed fluctuations and steadystate errors in the motor. In order to weaken the chattering problem of SMO, aiming at the chattering problem caused by dynamic changes in the approaching velocity of sliding mode dynamic variables, by introducing fuzzy logic theory, the trend speed of system state variables was intelligentized. Fuzzy rules were set to achieve intelligent dynamic speed, with the distance between the system dynamic variables towards the switching surface and the dynamic trend speed of the state variables as the rule factors, and dynamic intelligent trend speed was achieved; Secondly, in response to the system chattering caused by the system switching function, a continuous function F(s) was further adopted to replace the discontinuous sgn(s) symbol function. This scheme effectively weakens the chattering problem of the system and improves the stability of the system compared with SMO control.
Keywords:permanent magnet synchronous motor; sensorless control; sliding mode observer; fuzzy control; high frequency chattering; sliding mode control
0"引"言
永磁同步電機(permanent magnet synchronous motor,PMSM)由于其體積小、效率高等優點在工業領域得到了廣泛的應用[1]。PMSM控制需要傳感器、編碼器等機械器件來確定轉子的位置,但是目前常用的增量式編碼器和霍爾傳感器使得PMSM的成本增加,體積增大,同時會使得系統的穩定性降低,因此對于無傳感控制的研究得到了廣泛的關注[2]。
無傳感控制技術是通過檢測電機繞組中的電信號來提取轉子的位置信息,如定子電壓和電流,通過控制算法實現電機轉子速度和位置估算,常用的無傳感控制方法可以分為兩類,包括基于顯著性跟蹤的高頻注入法[3]和基于機器模型的反電動勢方法[4]。目前應用算法可投入廣泛應用的有滑模觀測器法[5-7]、模型參考自適應控制算法[8]、擴展卡爾曼濾波算法[9]等。
滑模觀測器(sliding mode observer,SMO)作為一種強魯棒性的非線性觀測器,以其設定電流與反饋電流為誤差控制元素來設計觀測器,以此可以得出PMSM轉子數據以及反電動勢大致數值等數據。作為一種典型的反電動勢方法,該方式有不敏感于電機參數的優勢。然而,滑模控制的抖振問題會降低觀測器的估算精確度,導致電機產生轉速波動。在實際應用中為了減小系統的抖振問題,通常會以開關函數和狀態量趨近速度為出發點進行優化,通過采用平滑函數來代替切換函數[10-12]來削弱系統抖振。文獻[13]設計了一種連續冪次函數Fal函數來代替傳統的符號函數,有效地減小了抖振問題。同時有些人通過對狀態量趨近速度進行控制[14-15],文獻[16]采用模糊控制原理對滑模切換增益進行智能調節,從而控制狀態量的趨近速度,該方式有效削弱了系統的抖振問題。
本文采用表貼式永磁同步電機作為系統控制對象,通過分析滑模觀測器抖振問題,并究其產生的原因進行研究,提出一種超螺旋滑模觀測器(fuzzy super twisting silding mode observer,FSTSMO)。首先,采用F(s)函數代替傳統的sgn(s)開關函數。其次,對滑模控制的滑模切換增益采用模糊控制方式,使其隨著與滑模面距離的變化而變化。采取以上方式以期能夠削弱系統的抖振問題。
1"傳統滑模觀測器
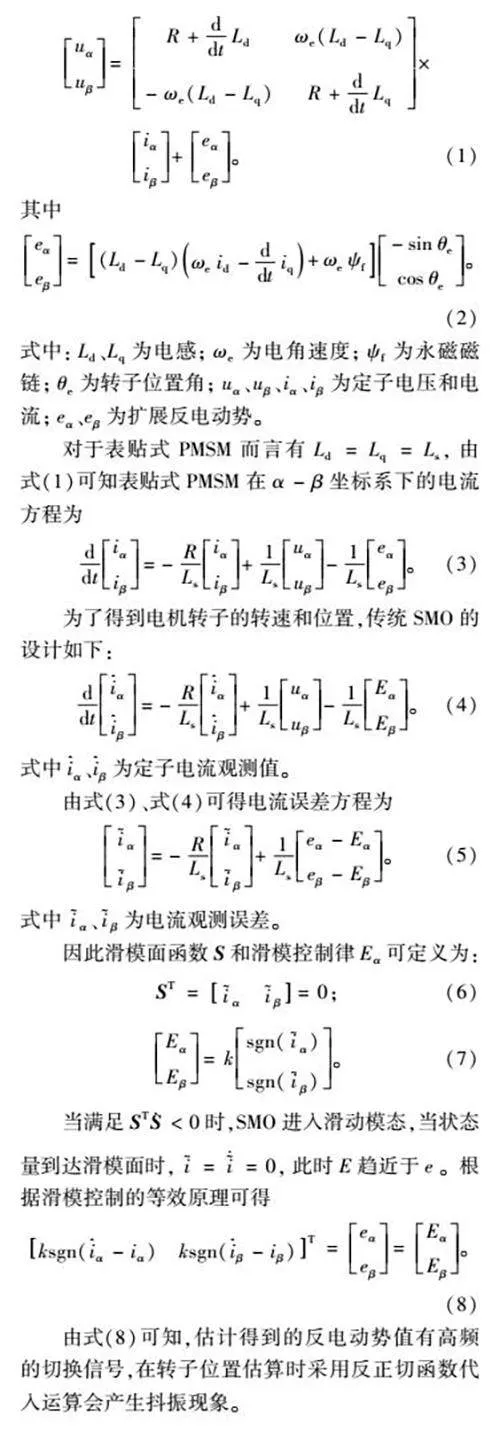
PMSM的兩相旋轉電壓方程為
由式(8)可知,估計得到的反電動勢值有高頻的切換信號,在轉子位置估算時采用反正切函數代入運算會產生抖振現象。
2"超螺旋滑模觀測器
對于一個動態系統中的控制器來說,通過設置控制器輸入,并通過數據反饋調節使得系統控制狀態量在有限的時間內收斂到0。本節提出一個動態觀測器,該觀測器采用超螺旋控制(supertwisting control,STC)算法,根據式(4)可得
由Lyapunov定理可知系統滿足ss·lt;0,系統漸進穩定,即系統狀態量具有較短時間穩定優勢。
3"模糊控制器
為了削弱滑模控制存在的抖振問題,將模糊控制理論引入滑模控制中,采用滑模面作為模糊控制的輸入,模糊邏輯設計時對于被控對象的模型并無特別要求,但對專家經驗非常依賴,其控制原理是將專家經驗融入控制系統來設計模糊規則,隨著狀態量與滑模面距離的變化對滑模增益進行有效估計。
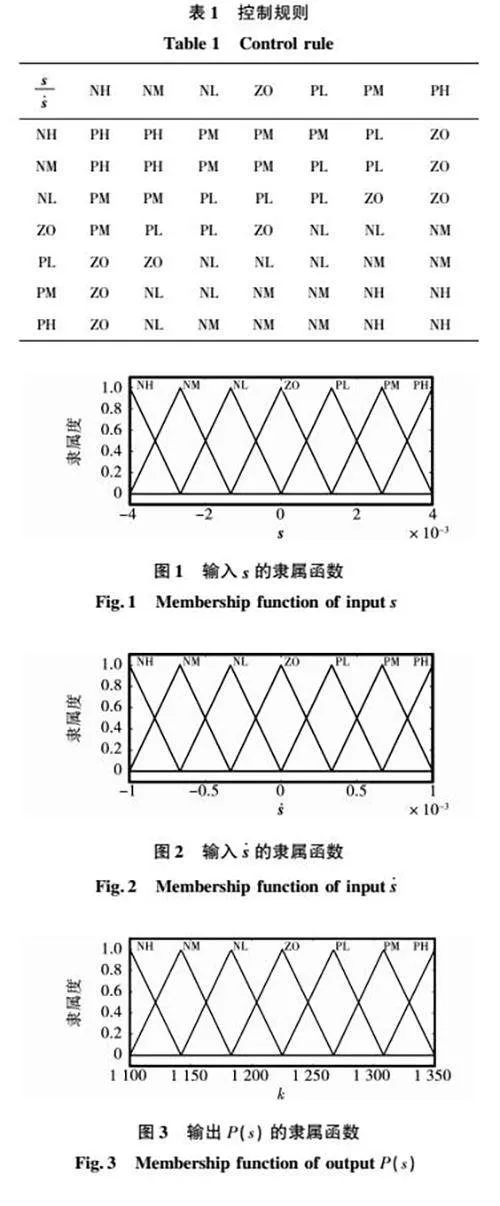
定義模糊控制輸入量的模糊語言為:負高(NH)、負中(NM)、負低(NL)、零(ZO)、正低(PL)、正中(PM)、正高(PH)。定義模糊輸出的語言為:負高(NH)、負中(NM)、負低(NL)、零(ZO)、正低(PL)、正中(PM)、正高(PH),設計模糊控制規則表如表1所示。由表可知,模糊邏輯理論設計為7個模糊子集并對應7個數據輸出,模糊邏輯采用Mamdani為其核心算法以及采用重心反模糊化得出可識別輸出量。其控制邏輯如圖1~圖3所示。
設計控制規則,使得STSMO系統切換增益隨著狀態量與切換面的距離自整定。系統狀態量距離滑模切換面較遠時,滑模增益值較大,同時狀態量趨近速度很快;當系統狀態量與滑模切換面較近時,滑模增益值較小,狀態量趨近速度較小,從而削弱系統的抖振。
4"仿真和實驗驗證
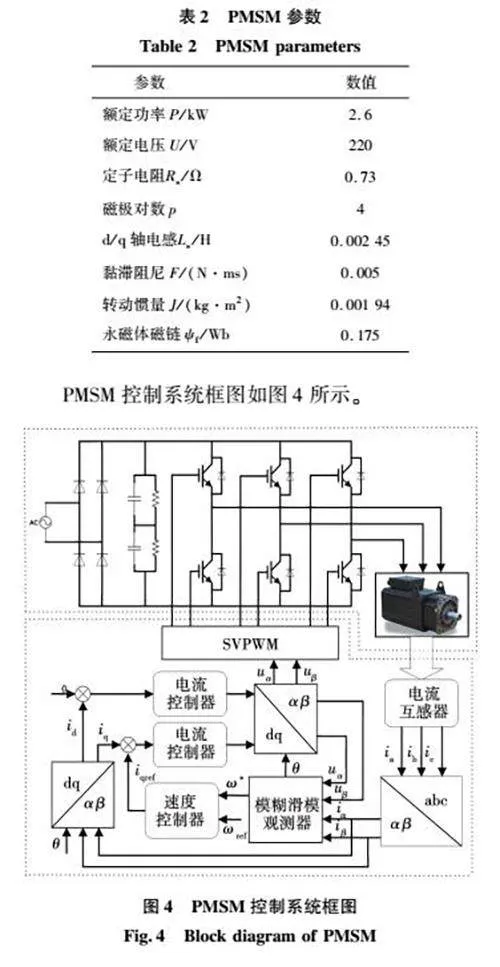
搭建Simulink模型以及搭建平臺試驗,驗證本文所提控制策略,PMSM參數如表2所示。
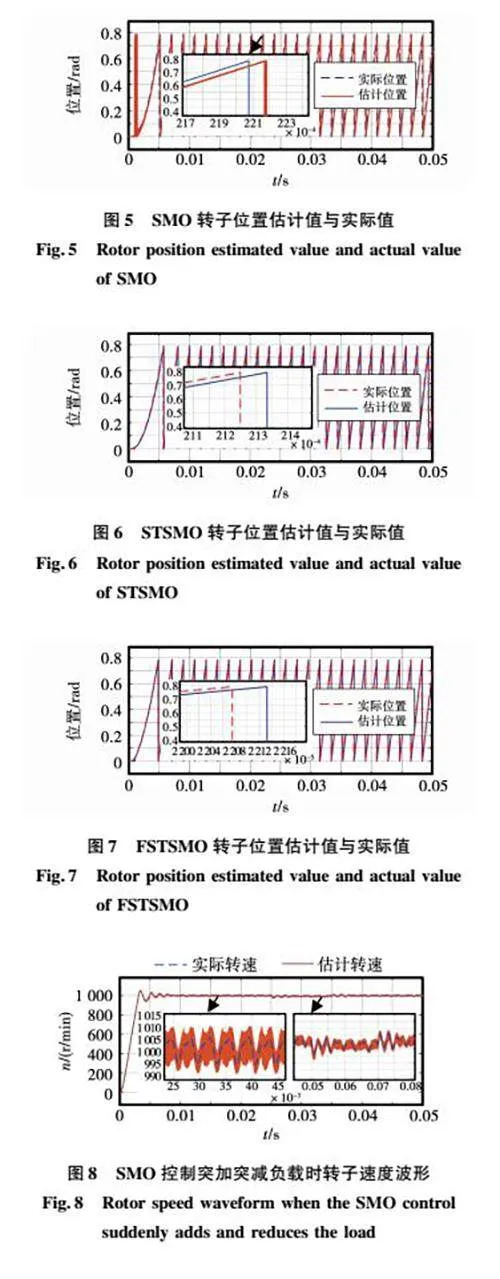
FSTSMO、STSMO以及SMO系統仿真波形如圖5~圖12所示。
由圖5、圖6可知, STSMO控制相較于SMO控制提高了系統轉子位置估計精確度。由圖7可知,將模糊控制理論引入STSMO中,FSTSMO相比于STSMO轉子位置估計更精確,系統控制性能更好。
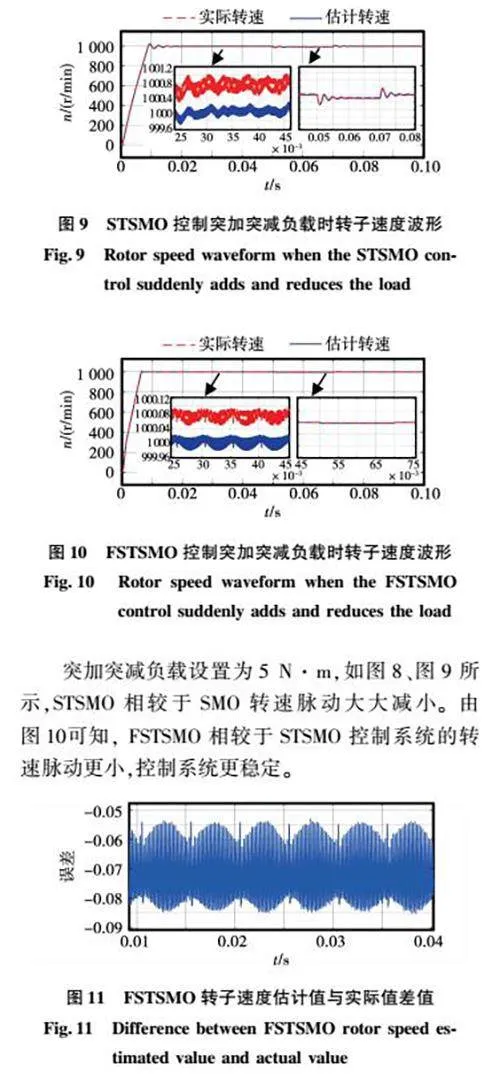
設置仿真時間為0.1 s,給定階躍轉速指令為1 000 r/min,開關頻率為10 kHz,突加突減負載為5 N·m,系統轉子速度估計值與實際值仿真波形如圖8~圖10所示。
由圖8、圖9可知,給定轉速為1 000 r/min,SMO控制存在較大的轉速超調量,STSMO控制相較于SMO控制轉速超調量較小,同時轉速估計更加準確。如圖10所示,將模糊控制理論引入STSMO中,可知FSTSMO相較于STSMO系統的轉速超調量更小,削弱了系統的抖振,實現了更精確的轉速估計。
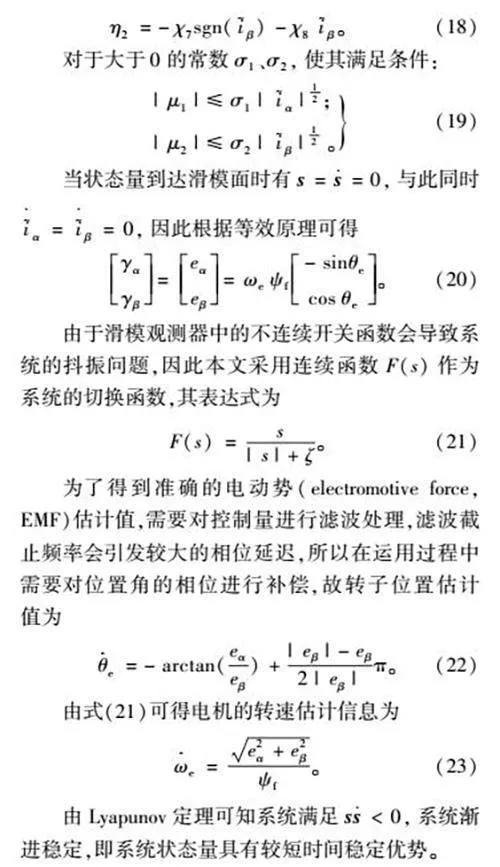
突加突減負載設置為5 N·m,如圖8、圖9所示,STSMO相較于SMO轉速脈動大大減小。由圖10可知, FSTSMO相較于STSMO控制系統的轉速脈動更小,控制系統更穩定。
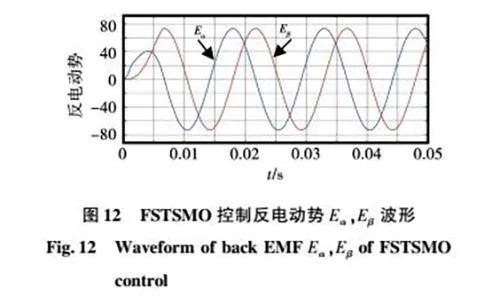
由圖8、圖9可知,SMO轉子轉速估計的波動較大,轉速誤差在-10~10 r/min之間,STSMO轉速估計誤差在-0.95~-0.45 r/min之間。由圖10、圖11可知,FSTSMO轉子轉速估計值與實際轉速的差值在-0.085~-0.065 r/min之間。圖12為FSTSMO控制反電動勢波形,由波形可知,Eα與Eβ相差90°相位。
由文獻[8]可知,傳統模型參考自適應轉速估計誤差在8.1~10.6 r/min采用改進滑模-模型參考自適應方式時,轉速誤差估計在3.9~4.6 r/min。由文獻[9]可知,擴展卡爾曼濾波轉速估計誤差值也遠大于FSTSMO控制系統,可知所提出的FSTSMO控制轉速估計更加精準,系統響應更穩定。
系統搭建控制試驗平臺如圖13所示。
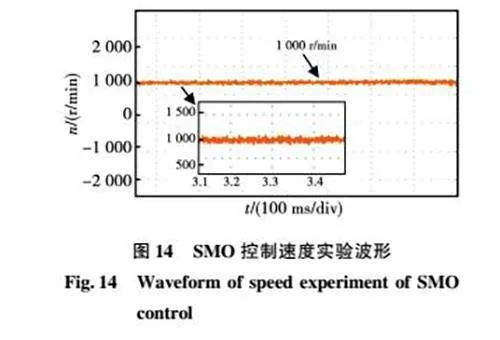
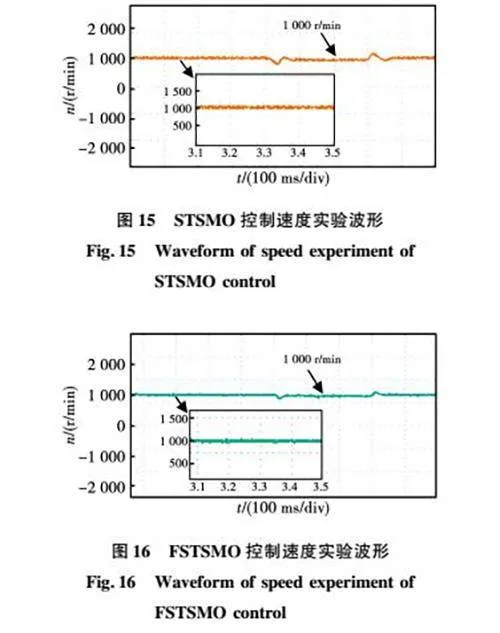
SMO、STSMO和FSTSMO的控制速度實驗波形如圖14~圖16所示。由圖14可知,系統給定轉速為1 000 r/min,SMO控制存在較大的抖振,會影響系統的運行性能。
由圖14~圖16可知,STSMO相較于SMO控制大大削弱了系統抖振,提高了系統穩定性,FSTSMO控制相較于STSMO控制系統抖振更小,系統穩定性更強,以突加突減負載為突加狀況時,系統有較短穩定時間優勢。
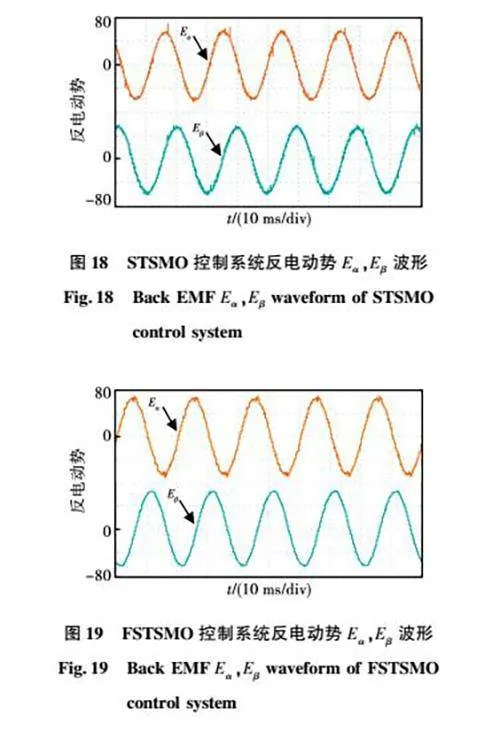
SMO、STSMO和FSTSMO控制系統反電動勢波形如圖17~圖19所示。由圖17、圖18可知,STSMO相較于SMO控制其反電動勢估計波形較平滑,提高了系統控制精確度,Eα與Eβ相差90°相位,進一步證明了反電動勢估計的正確性。由圖19可知,將模糊控制理論引入STSMO控制中,FSTSMO相較于STSMO系統控制精確度更高,系統更穩定。
本文提出的FSTSMO控制相較于SMO控制有效地削弱了系統的抖振,降低了轉速波動,提高了轉子位置估計精確度,能夠以更短的時間達到系統穩定,提高系統穩定性。
5"結"論
本文提出了一種FSTSMO控制方案,將模糊邏輯理論引入STSMO控制中,設置模糊規則是以系統動態量趨近動態面的距離與趨動速度動態化為規則元素,以此來動態智能化狀態量趨動速度,使得狀態量趨近速度隨著與滑模面的距離動態變化,同時進一步采用了連續函數F(s)代替不連續的sgn(s)符號函數,進一步提高了系統的穩定優勢。
通過仿真和實驗表明,FSTSMO控制大大提高了系統的穩定性,由仿真數據可知,FSTSMO系統轉子位置估計誤差為5×10-5 rad左右,轉速估計誤差在-0.085~-0.065 r/min之間,相較于SMO控制有更好的抖振控制優勢,其得出的轉子位置數據精確度和系統穩定性具有更好展現。
參 考 文 獻:
[1]"WANG B,WANG Y, FENG L, et al. Permanent magnet synchronous motor sensorless control using proportionalintegral linear observer with virtual variables: a comparative study with a sliding mode observer[J]. Energies,2019,12(5): 1.
[2]"REN N, FAN L, ZHANG Z. Sensorless PMSM "control with sliding mode observer based on sigmoid function[J]. Journal of Electrical Engineering amp; Technology,2021,16(2):933.
[3]"LIN T C, ZHU Z Q. Sensorless operation capability of surfacemounted permanentmagnet machine based on highfrequency signal injection methods[J]. IEEE Transactions on Industry Applications,2015,51(3):2161.
[4]"ZHAO L, HUANG J, LIU H, et al. Secondorder slidingmode observer with online parameter identification for sensorless induction motor drives[J]. IEEE Transactions on Industrial Electronics,2014,61(10):5280.
[5]"王春風,趙青青,孟旭,等.直流電機的非奇異快速Terminal滑模位置控制[J].哈爾濱理工大學學報,2019,24(4):36.
WANG Chunfeng, ZHAO Qingqing, MENG Xu,et al. Non singular fast Terminal sliding mode position control for DC motors [J]. Journal of Harbin University of Science and Technology, 2019, 24(4): 36.
[6]"LIANG D, LI J, QU R, et al. Adaptive secondorder slidingmode observer for PMSM sensorless control considering VSI nonlinearity[J].IEEE Transactions on Power Electronics,2017,33(10):8994.
[7]"GONG C, HU Y, GAO J, et al. An improved delaysuppressed sliding mode observer for sensorless vectorcontrolled PMSM[J]. IEEE Transactions on Industrial Electronics,2020,67(7):5913.
[8]"王棟.基于滑模-模型參考自適應的異步電動機無速度傳感器控制[D].西安:西安理工大學,2021.
[9]"程梁, 王維強,余天賜,等.基于無跡卡爾曼濾波的永磁無刷電機轉矩脈動抑制研究[J].大電機技術,2021(6):10.
CHENG Liang, WANG Weiqiang, YU Tianci, et al. Research on torque ripple suppression of permanent magnet brushless motor based on unscented Kalman filtering [J]. Large Electric Machine and Hydraulic Turbine, 2021(6):10.
[10]"祝新陽,曾國輝,黃勃,等. 改進滑模觀測器的永磁同步電機矢量控制[J].信息與控制,2020,49(6):708.
ZHU Xinyang, ZENG Guohui, HUANG Bo, et al. Improving the vector control of a permanent magnet synchronous motor for a slidingmode observer [J]. Information and Control, 2020,49(6): 708.
[11]"張伯澤,宗劍,錢平.基于滑模變結構控制的內置式永磁同步電機無位置傳感器矢量控制[J].電機與控制應用,2020,47(8):36.
ZHANG Boze, ZONG Jian, QIAN Ping.Built in permanent magnet synchronous motor based on sliding mode variable structure control [J].Electric Machines and Control Application, 2020,47(8): 36.
[12]"張紫君,熊官送,曹東海.基于無位置傳感器的永磁同步電機控制技術研究[J].導航定位與授時,2020,7(4):102.
ZHANG Zijun, XIONG Guansong, CAO Donghai. Research on the control technology of permanent magnet synchronous motor based on no position sensor [J]. Navigation, Positioning and Timing, 2020,7(4): 102.
[13]"張文賓,繆仲翠,余現飛,等.基于改進型滑模觀測器的永磁同步電機分數階微積分滑模控制[J].電機與控制應用, 2018,45(7):8.
ZHANG Wenbin, MIAO Zhongcui, YU Xianfei, et al. Fractional calculus sliding mode control of a permanent magnet synchronous motor based on a modified sliding mode observer [J]. Electric Machines and Control Application, 2018,45 (7): 8.
[14]"陶彩霞,趙凱旋,牛青.考慮滑模抖振的永磁同步電機模糊超螺旋滑模觀測器[J].電力系統保護與控制,2019,47(23):11.
TAO Caixia, ZHAO Kaixuan, NIU Qing. A fuzzy super helical sliding mode observer of a permanent magnet synchronous motor considering sliding mode shaking [J]. Power System Protection and Control, 2019,47(23): 11.
[15]"趙凱旋.基于滑模變結構永磁同步電機控制系統抖振問題的研究[D].蘭州:蘭州交通大學,2019.
[16]"徐冬磊.基于滑模變結構的永磁同步電機矢量控制研究[D].武漢:華中科技大學,2019.
(編輯:邱赫男)
收稿日期: 2022-04-11
基金項目:國家科技助力經濟2020(Q2020YFF0402198);黑龍江省科技攻關資助項目(GC04A517)
作者簡介:禹"聰(1997—),男,碩士研究生,研究方向為永磁同步電機及其控制;
康爾良(1967—),男,博士,教授,碩士生導師,研究方向為電機測試與電機控制。
通信作者:康爾良
猜你喜歡
現代電子技術(2017年1期)2017-02-16 11:49:32
汽車工程學報(2016年5期)2017-01-16 02:42:50
計算技術與自動化(2016年4期)2017-01-11 14:06:23
電子技術與軟件工程(2016年19期)2016-12-19 18:43:28
中國科技博覽(2016年15期)2016-08-23 00:59:37
電腦知識與技術(2016年13期)2016-06-29 21:41:37
科技視界(2016年12期)2016-05-25 11:07:56
電腦知識與技術(2016年2期)2016-03-22 22:21:46
電腦知識與技術(2016年1期)2016-03-22 15:49:38
哈爾濱理工大學學報(2015年6期)2016-02-18 00:26:49
