小型四旋翼無人機(jī)姿態(tài)控制研究
2024-05-22 00:21:42徐琬婷張強(qiáng)強(qiáng)
新鄉(xiāng)學(xué)院學(xué)報(bào) 2024年3期
徐琬婷,張強(qiáng)強(qiáng),梅 源
(1.蕪湖職業(yè)技術(shù)學(xué)院 汽車與航空學(xué)院,安徽 蕪湖 241006;2.沈陽航空航天大學(xué) 人工智能學(xué)院,遼寧 沈陽 110136)
隨著嵌入式技術(shù)及計(jì)算機(jī)、傳感器技等相關(guān)技術(shù)的發(fā)展,小型四旋翼無人機(jī)以其結(jié)構(gòu)簡(jiǎn)單、易操作等優(yōu)勢(shì)在各個(gè)領(lǐng)域都得到了廣泛的應(yīng)用。小型四旋翼無人機(jī)由于自身承載能力有限,需要搭載體積小、慣性低和分辨率受限的傳感器,在極端環(huán)境下,容易受溫度、噪聲和震動(dòng)等因素影響,從而降低了無人機(jī)的姿態(tài)控制可靠性。為了解決這一問題,本設(shè)計(jì)利用了卡爾曼濾波有效增加了傳感器采集數(shù)據(jù)的準(zhǔn)確性,并采用了多種非線性控制方法,如PID 控制算法、滑模控制算法和LQR 控制算法等,有效增加了無人機(jī)的飛行性能、穩(wěn)定性、適應(yīng)性。
1 系統(tǒng)構(gòu)成及飛行姿態(tài)控制原理
1.1 系統(tǒng)總體架構(gòu)和功能概述
小型四旋翼飛行器的主要組成部分包括STM32103C8T6 主控芯片、OLED 顯示模塊、無線通信模塊、MPU6050 姿態(tài)信息采集模塊、光流模塊、電源模塊等。系統(tǒng)啟動(dòng)后,傳感器開始收集姿態(tài)和位置信息,并將數(shù)據(jù)傳輸回單片機(jī)進(jìn)行處理,實(shí)時(shí)通過液晶顯示屏顯示。本次測(cè)試所用的小型四旋翼無人機(jī)系統(tǒng)結(jié)構(gòu)如圖1 所示。
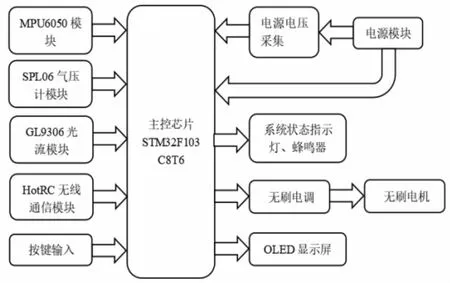
圖1 無人機(jī)系統(tǒng)結(jié)構(gòu)
小型四旋翼無人機(jī)的控制系統(tǒng)以STM32 為主控芯片,負(fù)責(zé)飛行動(dòng)作和數(shù)據(jù)處理。采用MPU6050 姿態(tài)傳感器獲取四旋翼飛行位置姿態(tài)信息,并利用GL9306 光流模塊作為位移傳感器感知無人機(jī)位置并實(shí)時(shí)發(fā)送給處理器進(jìn)行處理。SPL06 氣壓計(jì)模塊測(cè)得高度信息,并通過OLED 顯示屏實(shí)時(shí)展示位置姿態(tài)參數(shù)。HotRC 無線通信模塊實(shí)現(xiàn)與四旋翼無人機(jī)的通信和數(shù)據(jù)傳輸,以實(shí)現(xiàn)對(duì)無人機(jī)的即時(shí)控制。當(dāng)系統(tǒng)遭受強(qiáng)干擾、電源電壓低或飛行高度超過設(shè)定閾值范圍時(shí),系統(tǒng)將緊急迫降以保障設(shè)備安全[1]。
1.2 四旋翼無人機(jī)的飛行原理
四旋翼無人機(jī)主要分為“X”形和“十”形,本次研究聚焦于“十”形結(jié)構(gòu),當(dāng)槳葉高速旋轉(zhuǎn)時(shí),螺旋槳產(chǎn)生向上的升力。當(dāng)電機(jī)達(dá)到一定轉(zhuǎn)速時(shí),4 個(gè)螺旋槳所提供的升力大于其自身重力G,使無人機(jī)起飛。
為了確保無人機(jī)順利起飛,必須保證4 個(gè)槳葉具有相同的速度和角度,并產(chǎn)生相等的升力。螺旋槳旋轉(zhuǎn)方向示意圖見圖2,一對(duì)槳葉以相同速度旋轉(zhuǎn)方向相反的狀態(tài)旋轉(zhuǎn),在靜態(tài)平衡下實(shí)現(xiàn)四旋翼本體抵消反扭矩效應(yīng)及陀螺效應(yīng)[2]。

圖2 四旋翼無人機(jī)的螺旋槳旋轉(zhuǎn)方向示意圖
四旋翼無人機(jī)可以通過兩組電機(jī)的協(xié)同作用實(shí)現(xiàn)多種姿態(tài)變化,包括懸停、翻滾、垂直運(yùn)動(dòng)、俯仰和偏航5 種運(yùn)動(dòng)狀態(tài)。而四旋翼無人機(jī)的姿態(tài)變化與4 個(gè)螺旋槳的轉(zhuǎn)向和轉(zhuǎn)速密切相關(guān),只需精確控制各個(gè)旋翼的運(yùn)動(dòng)即可駕馭整體飛行。
1.3 懸停和垂直運(yùn)動(dòng)
四旋翼無人機(jī)應(yīng)在懸停的基礎(chǔ)上完成各種運(yùn)動(dòng),因而懸停是最基本的運(yùn)動(dòng)狀態(tài)。當(dāng)螺旋槳產(chǎn)生的升 力F總(F總=F1+F2+F3+F4,其中F1、F2、F3、F4分別為機(jī)翼1、2、3、4 的升力)大于四旋翼無人機(jī)所受的重力時(shí),將產(chǎn)生向上的加速度,使得無人機(jī)起飛;當(dāng)重力與升力相等時(shí),實(shí)現(xiàn)了無人機(jī)的懸停狀態(tài)。在此基礎(chǔ)上,通過同時(shí)調(diào)整四個(gè)電機(jī)轉(zhuǎn)速可以實(shí)現(xiàn)垂直運(yùn)動(dòng)。四翼無人機(jī)受力分析如圖3 所示。若F總=重力G,則四旋翼無人機(jī)處于懸停狀態(tài);若F總<重力G,則四旋翼無人機(jī)會(huì)垂直下降。

圖3 四旋翼無人機(jī)受力分析
1.4 翻滾運(yùn)動(dòng)
設(shè)Front 指向四旋翼無人機(jī)的前方,當(dāng)四旋翼無人機(jī)處于懸停或前進(jìn)狀態(tài)時(shí)執(zhí)行順時(shí)針或逆時(shí)針轉(zhuǎn)操作可使四翼無人機(jī)進(jìn)行滾動(dòng)運(yùn)動(dòng)。在保持垂直方向總升力不變的情況下,通過調(diào)整1 號(hào)和3 號(hào)電機(jī)的轉(zhuǎn)速來實(shí)現(xiàn)順時(shí)針或逆時(shí)針翻滾。同時(shí),控制當(dāng)前姿態(tài)變化的2 號(hào)和4 號(hào)旋翼增加轉(zhuǎn)速以保持四旋翼無人機(jī)高度穩(wěn)定。當(dāng)F1>F2=F4>F3時(shí),四旋翼無人機(jī)將進(jìn)行逆時(shí)針滾動(dòng);而當(dāng)F3>F2=F4>F1時(shí),則會(huì)進(jìn)行順時(shí)針滾動(dòng),如圖4 所示。
1.5 俯仰運(yùn)動(dòng)
當(dāng)需要將無人機(jī)控制到特定位置時(shí),僅通過翻滾是不足以完成任務(wù)的,還需結(jié)合俯仰運(yùn)動(dòng)。俯仰運(yùn)動(dòng)與翻滾運(yùn)動(dòng)的控制原理相同,通過保持2 號(hào)和4號(hào)電機(jī)轉(zhuǎn)速不變,并調(diào)節(jié)1 號(hào)和3 號(hào)電機(jī)轉(zhuǎn)速來實(shí)現(xiàn)前后移動(dòng)。然而,在非控制當(dāng)前姿態(tài)變化的旋翼1號(hào)和3 號(hào)轉(zhuǎn)速保持不變時(shí)四旋翼高度不變。當(dāng)F2>F1=F3>F4時(shí),四旋翼無人機(jī)前傾;當(dāng)F4>F1=F3>F2時(shí),四旋翼無人機(jī)后仰。
1.6 偏航運(yùn)動(dòng)
除了具備上下、前后直線運(yùn)動(dòng)功能外,四旋翼無人機(jī)還能實(shí)現(xiàn)偏航運(yùn)動(dòng),偏航運(yùn)動(dòng)通過同時(shí)控制兩組旋翼的轉(zhuǎn)速來實(shí)現(xiàn)。其中2 號(hào)和4 號(hào)電機(jī)為一組,1 號(hào)和3 號(hào)電機(jī)為一組,在不同轉(zhuǎn)速下利用反扭力差異來達(dá)到偏航運(yùn)動(dòng)的目的。當(dāng)F2=F4>F1=F3時(shí),四旋翼無人機(jī)逆時(shí)針偏航;當(dāng)F2=F4<F1=F3時(shí),四旋翼無人機(jī)順時(shí)針偏航。
2 軟件數(shù)據(jù)處理
小型四旋翼飛行器在飛行過程中需要實(shí)時(shí)處理大量準(zhǔn)確的數(shù)據(jù),否則經(jīng)過多次計(jì)算后會(huì)產(chǎn)生較大誤差,從而對(duì)四旋翼無人機(jī)的姿態(tài)判斷和飛行性能造成影響。為了減少環(huán)境因素和干擾信號(hào)對(duì)飛行的影響,在搭載傳感器輸出數(shù)據(jù)時(shí)需要進(jìn)行濾波處理,并結(jié)合控制算法以提高小型四旋翼無人機(jī)的精確性和抗干擾能力[3]。
2.1 數(shù)據(jù)處理
MPU6050 姿態(tài)傳感器可直接輸出6 軸信息,直接輸出的6 軸數(shù)據(jù)精度可達(dá)到0.01°,經(jīng)過對(duì)6 軸信息進(jìn)行姿態(tài)解算可以得到四旋翼無人機(jī)的姿態(tài)角。定義繞X 軸旋轉(zhuǎn)為俯仰角θ,繞Y 軸旋轉(zhuǎn)為滾轉(zhuǎn)角?,繞Z 軸旋轉(zhuǎn)為偏航角ψ。
2.1.1 DMP 解算方式
MPU6050 是一款高性能的六軸慣性測(cè)量單元,內(nèi)部集成了運(yùn)動(dòng)處理單元DMP(Digital Motion Processor),通過DMP,用戶可以直接從MPU6050 中讀取四元數(shù)(q1,q2,q3,q4),并將導(dǎo)航坐標(biāo)系轉(zhuǎn)換為機(jī)體坐標(biāo)系,其轉(zhuǎn)換關(guān)系可表示為
其中:
且四元數(shù)滿足條件
q1,q2,q3,q4分別為
(xb,yb,zb)為機(jī)體坐標(biāo),(xn,yn,zn)為導(dǎo)航坐標(biāo)。
由式(1)可得,四旋翼無人機(jī)的姿態(tài)角為θ、?、ψ,即
在解算四旋翼無人機(jī)飛行姿態(tài)角時(shí),可用DMP硬件進(jìn)行四元數(shù)計(jì)算,并利用式(2)中的轉(zhuǎn)換關(guān)系將其轉(zhuǎn)化為姿態(tài)角。在使用硬件DMP 進(jìn)行姿態(tài)解算時(shí),仍然存在漂移現(xiàn)象(包括溫度漂移和零點(diǎn)漂移)、自身振動(dòng)對(duì)姿態(tài)角產(chǎn)生抖動(dòng)影響和傳感器受到具有不確定性的環(huán)境因素(如磁場(chǎng)變化等)的干擾,因此,需要采用數(shù)據(jù)處理算法對(duì)數(shù)據(jù)進(jìn)行濾波處理以使環(huán)境變量的影響最小化。
2.1.2 卡爾曼濾波方式
卡爾曼濾波是一種用于估計(jì)系統(tǒng)狀態(tài)的數(shù)學(xué)方法,它根據(jù)當(dāng)前時(shí)刻的觀測(cè)值和前一個(gè)時(shí)刻的預(yù)測(cè)值之間的誤差,通過計(jì)算系統(tǒng)狀態(tài)進(jìn)行最優(yōu)估計(jì),并預(yù)測(cè)下一個(gè)時(shí)刻的狀態(tài)[4]。
MPU6050 解算過程可分為3 步。首先,從MPU6050 讀取3 軸加速度計(jì)和3 軸陀螺儀的數(shù)據(jù)。其次,通過積分處理3 軸加速度計(jì)值,并通過幾何運(yùn)算將3 軸陀螺儀數(shù)據(jù)轉(zhuǎn)換為相應(yīng)的姿態(tài)角。由于電場(chǎng)、磁場(chǎng)等因素的干擾,所得到的姿態(tài)數(shù)據(jù)容易受到影響,因此,需引入卡爾曼濾波算法對(duì)數(shù)據(jù)進(jìn)行融合濾波處理,以提高姿態(tài)數(shù)據(jù)的準(zhǔn)確性。圖5 為DMP姿態(tài)解算方式和卡爾曼濾波姿態(tài)解算方式的MATLAB 仿真結(jié)果。

圖5 DMP 姿態(tài)解算方式和卡爾曼濾波姿態(tài)解算方式MATLAB 仿真結(jié)果
由圖5 可知,用DMP 方式解算姿態(tài)角時(shí)存在大量干擾信號(hào),輸出的姿態(tài)角波動(dòng)比較大,而使用卡爾曼濾波濾除了大部分的干擾信號(hào),輸出的姿態(tài)角更加接近真實(shí)值,大大地改善了四旋翼無人機(jī)控制系統(tǒng)的控制性能。
2.2 控制算法分析
為了更好地驗(yàn)證經(jīng)過濾波后的效果,系統(tǒng)分別采用串級(jí)PID 控制算法、滑模控制算法和LQR 控制算法等對(duì)無人機(jī)姿態(tài)進(jìn)行控制,以選擇最好的方法提高小型無人機(jī)的可靠性[5]。
2.2.1 串級(jí)PID 控制算法
串級(jí)PID 控制算法包含2 個(gè)控制環(huán),外環(huán)用于位置控制,內(nèi)環(huán)用于姿態(tài)控制。以位置環(huán)的輸出作為姿態(tài)環(huán)的輸入,為保證四旋翼無人機(jī)運(yùn)行穩(wěn)定性,對(duì)位置和姿態(tài)環(huán)輸出進(jìn)行限幅處理。串級(jí)PID 控制器原理如圖6 所示。

圖6 串級(jí)PID 控制器控制原理圖
根據(jù)圖6,輸入位置信息為(x,y,z)=(5,5,5),經(jīng)過系統(tǒng)反饋后,得到位置信號(hào)偏差,并在位置環(huán)中應(yīng)用PID 算法進(jìn)行處理以獲得期望姿態(tài)角度θ、?和ψ,然后將姿態(tài)角度傳入姿態(tài)環(huán)中進(jìn)行PID運(yùn)算,從而生成PWM 輸出并驅(qū)動(dòng)四旋翼無人機(jī)飛行至指定位置,仿真結(jié)果如圖7 所示。
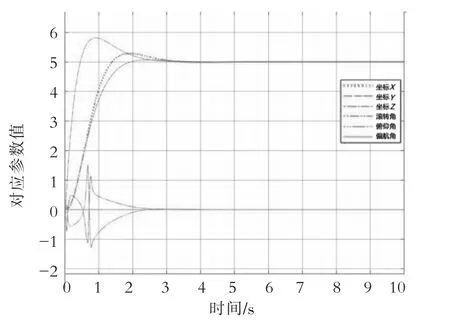
圖7 四旋翼無人機(jī)串級(jí)PID 控制仿真結(jié)果
由圖7 知,采用串級(jí)PID 控制的四旋翼無人機(jī)表現(xiàn)出較快的響應(yīng)速度,在約3 s 內(nèi)即能達(dá)到穩(wěn)定狀態(tài)。此外,從滾轉(zhuǎn)角和俯仰角的變化曲線也可以觀察到初始階段存在較大波動(dòng),而偏航角始終保持不變,則說明在姿態(tài)調(diào)節(jié)過程中無人機(jī)并未受電機(jī)力矩變化等因素影響而發(fā)生旋轉(zhuǎn)等對(duì)穩(wěn)定性產(chǎn)生負(fù)面影響。超調(diào)量達(dá)到了16%,證明采用串級(jí)PID 控制四旋翼無人機(jī)具備良好的控制效果。
2.2.2 滑模控制算法
滑模控制器仍采用雙閉環(huán)結(jié)構(gòu),外環(huán)為位置環(huán),其輸出作為內(nèi)環(huán)姿態(tài)環(huán)的期望輸入,并由系統(tǒng)當(dāng)前狀態(tài)實(shí)時(shí)調(diào)節(jié)系統(tǒng)的運(yùn)行速度。滑模控制算法分析仿真結(jié)果如圖8 所示。由圖8 知,在零初始狀態(tài)下給定輸入位置信號(hào)為(x,y,z)=(5,5,5),小型四旋翼的響應(yīng)得到顯著改善。系統(tǒng)反應(yīng)迅速,X、Y、Z 軸在不到2 s 的時(shí)間內(nèi)即可達(dá)到指定位置,并且超調(diào)量?jī)H為4%。但滾轉(zhuǎn)角和俯仰角出現(xiàn)波動(dòng),導(dǎo)致機(jī)身抖動(dòng),降低了四旋翼系統(tǒng)的穩(wěn)定性和抗干擾性能。

圖8 滑模控制算法仿真結(jié)果
2.2.3 LQR 控制算法
LQR(Linear Quadratic Regulator)是一種線性二次型調(diào)節(jié)器[6],LQR 基于全狀態(tài)反饋原理,通過加權(quán)求和不同狀態(tài)得到最優(yōu)控制量。作為一種最優(yōu)控制策略,LQR 屬于全狀態(tài)反饋控制結(jié)構(gòu),在系統(tǒng)運(yùn)行中以最小代價(jià)實(shí)現(xiàn)系統(tǒng)操作,LQR 控制算法的結(jié)構(gòu)原理如圖9 所示。
運(yùn)行LQR 控制算法時(shí),需要對(duì)系統(tǒng)狀態(tài)準(zhǔn)確估計(jì),并對(duì)其進(jìn)行離散化處理。在離散情況下,可以從遞歸和迭代的角度思考,并通過多次迭代達(dá)到設(shè)定的穩(wěn)定值。本研究采用LQR 控制方法對(duì)四旋翼飛行器進(jìn)行仿真,仿真結(jié)果如圖10 所示。
由仿真結(jié)果知,當(dāng)輸入位置信息(x,y,z)=(5,5,5)時(shí),四旋翼無人機(jī)展現(xiàn)出了迅速的響應(yīng)能力,起飛初期在X 軸和Y 軸方向的飛行速度最高可達(dá)到3 m/s。在4 s 內(nèi),四旋翼無人機(jī)已完成調(diào)節(jié)并進(jìn)入穩(wěn)態(tài)狀態(tài),并且其在Z 軸方向上輸出值已達(dá)到穩(wěn)態(tài)值的90%。在第5 s 時(shí),四旋翼無人機(jī)成功實(shí)現(xiàn)設(shè)定位置并完全進(jìn)入穩(wěn)態(tài)穩(wěn)定飛行階段。相較于之前2 種算法而言,無人機(jī)到達(dá)穩(wěn)態(tài)的時(shí)間比較長(zhǎng)。
3 結(jié)論
本文主要研究了基于STM32 單片機(jī)的小型四旋翼無人機(jī)的姿態(tài)控制問題,并對(duì)四旋翼無人機(jī)性能組態(tài)調(diào)整的快速響應(yīng)進(jìn)行了仿真測(cè)試。仿真結(jié)果表明,姿態(tài)信息經(jīng)過卡爾曼濾波后,能夠有效降低誤差和外部干擾信號(hào)對(duì)數(shù)據(jù)的影響,顯著提升飛行器所收集數(shù)據(jù)的準(zhǔn)確性和可靠性。
所用到姿態(tài)控制的3 種算法各有優(yōu)缺點(diǎn),滑模控制算法具有快速響應(yīng)特性和較小超調(diào)量,在系統(tǒng)出現(xiàn)擾動(dòng)時(shí)可以迅速調(diào)整。LQR 控制算法對(duì)系統(tǒng)模型的精確性要求較高,穩(wěn)定性良好,但動(dòng)態(tài)性能相對(duì)較差,串級(jí)PID控制算法的反應(yīng)速度不及滑模控制算法迅捷,并且存在一定超調(diào)量,具備更佳的穩(wěn)態(tài)特性和抗干擾能力。
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
測(cè)控技術(shù)(2018年12期)2018-11-25 09:37:34
北京航空航天大學(xué)學(xué)報(bào)(2017年9期)2017-12-18 07:12:25
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
電源技術(shù)(2016年9期)2016-02-27 09:05:39
電源技術(shù)(2015年1期)2015-08-22 11:16:28