基于深度學習的地圖線性要素走向判定方法
2024-05-07 10:23:46張淑霞馬小燕
地理空間信息 2024年4期
蔣 巍,張淑霞,馬小燕,薛 青
(1. 寧夏回族自治區自然資源成果質量檢驗中心,寧夏 銀川 750004;2. 西安銳思數智科技股份有限公司,陜西 西安 710000)
深度學習方法是對復雜圖像場景識別解析的重要方法之一,已被廣泛應用于計算機視覺任務。盡管基于深度學習在地圖要素提取方面取得了一些成果,但是在比例尺有差異的地圖中,比對地圖的幾何特征研究時,還沒有更加全面的智能化算法及技術[1-8]。本文以深度學習為技術手段,以人工標注的地圖的線性要素走向數據為依據,分析判定待審地圖的線性要素走向的正確性。在以寧夏回族自治區行政地圖的線狀要素提取為實際案例,其中包括行政邊界和河流,來驗證算法的有效性,期望為地圖審查中各類要素的地理位置確定提供參考。
1 方法原理與實現
地圖審圖依據的參考是標準地圖集,為實現待審地圖中線性要素走向的正確性,具體流程如圖1所示。

圖1 線性要素走向判定流程圖
1.1 地圖地理特征點目標識別
通常我們將標準地圖集作為參考地圖,它的尺寸和分辨率往往與待審地圖不同,因此首先需要對2 幅地圖進行配準對齊。本文利用地圖中重要的地理目標作為配準的控制點,使用深度神經網絡進行地理控制點的識別和定位。
選擇的地理目標如表1所示,在樣本地圖上標注省會城市、地級市和機場等地理目標樣本數據,生成目標檢測訓練樣本,所選地圖可以是待審地圖或標準地圖集,使用YOLOV7目標識別算法訓練地理目標識別神經網絡模型。通過訓練卷積神經網絡等提取圖像的高級語義特征,采用分類方法對輸入圖像的區域特征進行識別和提取,采用梯度下降算法優化模型輸出。在定位地理目標時借助文字提取和識別算法,并采用OCR相關技術輔助定位,簡化目標查找難度并提高算法魯棒性。
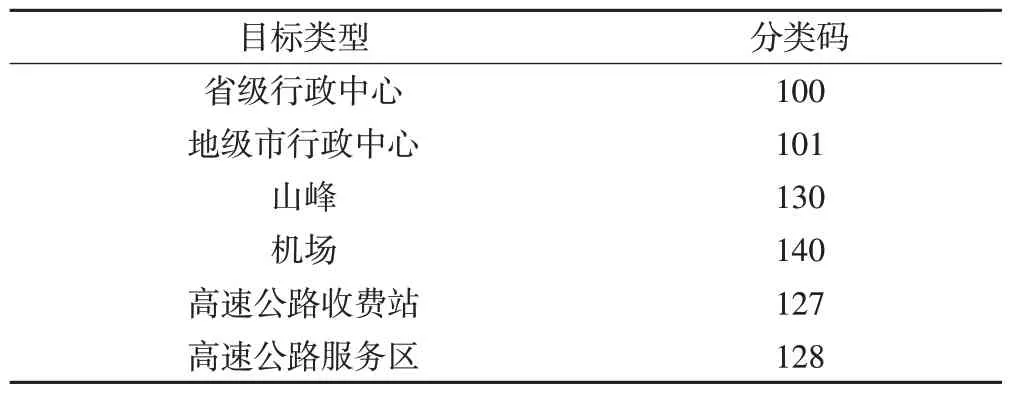
表1 地圖地理目標識別模型的類型定義
1.2 地圖配準
在地圖審圖過程中,有標準地圖集作為參考,也存在因為比例尺問題導致待審地圖與標準地圖的分級地圖級別、范圍不能一一對應,因此需要將二者配準對齊。具體地圖配準步驟包括以下5點。
1)匹配標準地圖:通過待審地圖的比例尺、尺寸、分辨率(dots per inch,DPI)等,匹配標準地圖庫中相應級別的標準地圖圖像數據。
2)提取地理目標點:通過已訓練的深度學習目標檢測模型與計算機視覺圖像算子,如角點檢測等,提取待審地圖中的地理目標位置集合和標準地圖圖像中的地理目標位置集合。地圖地理目標包括市鎮鄉村的位置、河流分叉點、河流匯聚點、道路起止點和道路交叉口等關鍵點。當標準地圖中地理目標的坐標已知時可直接利用其坐標參數。
3)地理目標點匹配:在已提取的待審地圖地理目標位置與標準地圖地理目標位置之間建立映射關系,進行地圖地理關鍵點對的匹配。將關鍵點特征中,包括名稱、圖像特征和幾何特征等做矢量化。通過距離函數計算得到不同關鍵點矢量的距離,距離小于閾值的點對作為匹配的關鍵點對。將關鍵點對依據特征距離進行降序排序,找到前n個(n≥3)最接近的關鍵點對,從而確定幾何變換的控制點。
4)地圖幾何變換:采用仿射變換的幾何變換方法將映射關系作為控制點,通過公式(1)和(2)將待審地圖和標準地圖進行配準。
式中,變換前坐標x,y;變換后坐標x’,y’;系數矩陣M為變換矩陣。
5)獲得幾何變換后配準對齊的地圖對。
1.3 地圖線性要素類型語義分割和幾何特征提取
通過DeeplabV3神經網絡算法,對表2所示地圖中省市縣區行政邊界、雙線河流、單線河流、高速公路、高速鐵路、各級公路、國鐵等線性要素進行提取。將輸出的推理結果作為線性要素的掩膜,得到線性要素的感興趣(region of interest,ROI)區域,在ROI區域獲得線性地物的邊緣并提取中心線。對中心線上的點密集采樣,獲得一系列中心線采樣點坐標(x,y)。
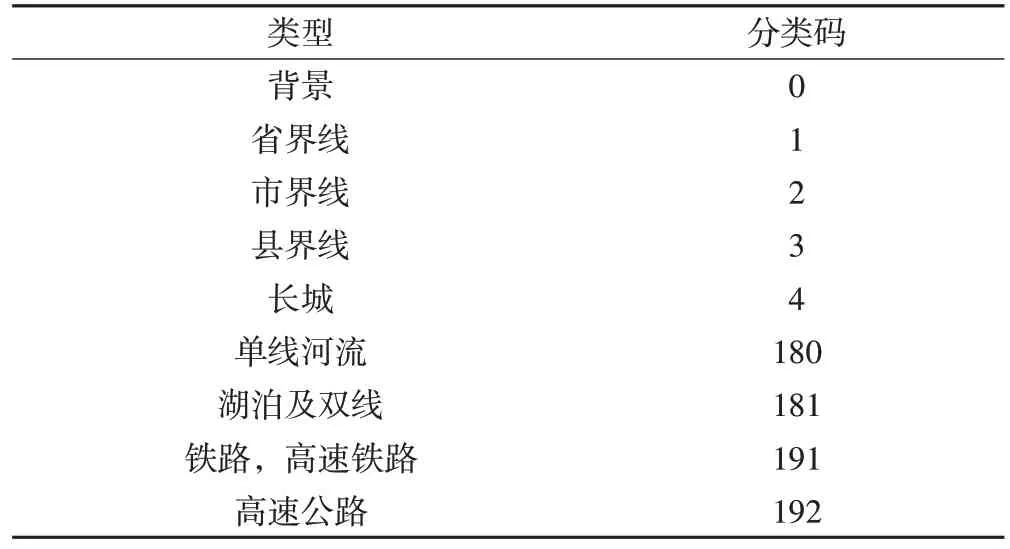
表2 地圖線性要素分類模型的類型定義
1.4 標準參考地圖線性要素中心線樣本庫
建立標注地圖線性要素中心線樣本庫,作為待審地圖中線性要素走向判定的標準參考。利用上述線性要素輪廓提取和中心點采樣方法,對標準地圖中的省市縣區行政邊界、雙線河流、單線河流、高速公路、高速鐵路、各級公路和國鐵等線性要素做輪廓提取,并獲得中心點坐標(x,y),構建標準參考庫。
1.5 地圖線性要素走向偏差判定
如式(3)所示,在獲得待審地圖線性要素中心點S坐標(xs,ys)和標準地圖中心參考點R坐標(xr,yr)后,地圖線性要素走向偏差判定依據參考點S與其最近待審地圖中心點R的歐氏距離d進行判定,設定閾值t,作為分類的判斷標準。
待審地圖線性要素中心點定位算法是通過參考點R坐標(xr,yr)計算周邊偏移量以內的點距離,在計算過程中記錄最小距離點N的坐標(xn,yn)。
如圖2 所示,紅色圓圈是待審地圖中心點,綠色圓點是配準后的標準地圖參考點,距離不超過一定閾值則被判定為走向正確。閾值根據圖像分辨率設置,本文定義為3個像素。
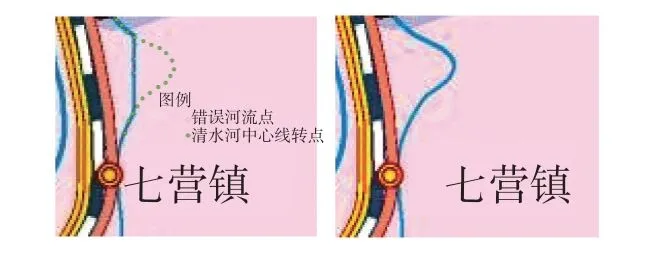
圖2 待審地圖線性要素中心點示意圖
2 實驗結果與分析
2.1 評價指標
為準確評價本文所采用深度學習方法對地圖線性要素的識別能力,選取常用評價方法準確率(pixel accuracy, PA)、 召回率(Recall)、F1 測度值(F1-Score) 和平均交并比(mean intersection over union,MIoU)4個參數對模型性能進行評價。
式中,TP為真實標簽為正確分類且預測結果也為正確分類的個數;FP為真實標簽為錯誤分類但預測結果為正確分類的個數;FN為真實標簽為正確分類但預測結果為錯誤分類的個數;TN為真實標簽為錯誤分類且預測結果也為錯誤分類的個數;P為預測值;G為真實值;K為總類別個數。
2.2 實驗結果與分析
采用深度學習方法對寧夏回族自治區行政地圖提取自治區界與清水河走向,其中結果如圖3、4所示。
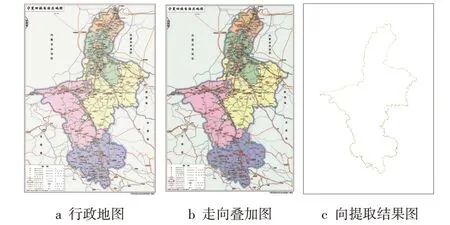
圖3 寧夏回族自治區行政地圖與寧夏回族自治區界走向提取結果圖審圖號:寧S(2022)第001號
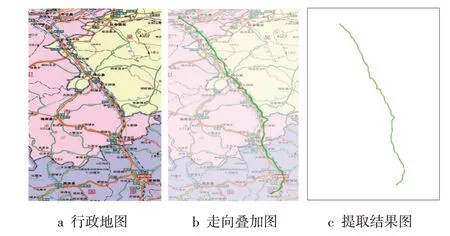
圖4 寧夏回族自治區行政地圖與清水河走向提取結果圖審圖號:寧S(2022)第001號
利用模型評價參數對目標識別方法和語義分割方法的識別與提取結果做精度評價,由表3 可知,目標識別方法的準確率、召回率和F1 測度值分別為78.26%、87.97%和82.83%;語義分割方法的平均交并比(mean intersection over union,MIoU)為88.00%。

表3 識別結果統計分析
點緩沖區是以點對象為圓心,以給定的緩沖距離為半徑生成的圓形區域。在線性要素走向判定的過程中,采用設定點緩沖區的方法決定輸出線性要素的位置范圍,確定行政邊界和河流的走向偏差是否符合要求。點緩沖區數學表達式為:
即以線性要素中第i點Oi為圓心,對象Oi的半徑為r的緩沖區;Bi為距Oi的距離d小于等于r的全部點的集合;d為最小歐氏距離。
其中,通過實驗確定的經驗值,將行政邊界走向判定的緩沖區范圍設定為5 個像素,將河流走向判定的緩沖區范圍設定為5 個像素,其判定結果分析如表4所示。

表4 線性要素的閾值設定與分析
由上表可知,將行政邊界和清水河的緩沖區半徑設定為5 個像素,即以5 個像素為行政邊界的緩沖區的界內認定為正確的線性走向,溢出緩沖區則視為錯誤的邊界和走向。采用人工方法在行政地圖上選取寧夏回族自治區行政邊界樣本點1105 個,清水河樣本點542 個,對本文的方法進行總體的精度評價,結果表明,行政邊界線性要素判定的準確率(PA)和召回率(Recall)分別為91.86%和96.19%;清水河線性要素判定的準確率(PA)和召回率(Recall)分別為94.68%和85.42%。
2.3 深度學習方法與傳統方法對比
選擇銀川市、固原市、石嘴山市、吳忠市、中衛市和寧夏回族自治區6個區域的82張行政區劃地圖和專題地圖,其中包括64 張正確地圖和18 張包含錯誤信息的地圖,采用本文的方法與傳統的人工目視解譯方法進行對比,結果如表5所示。
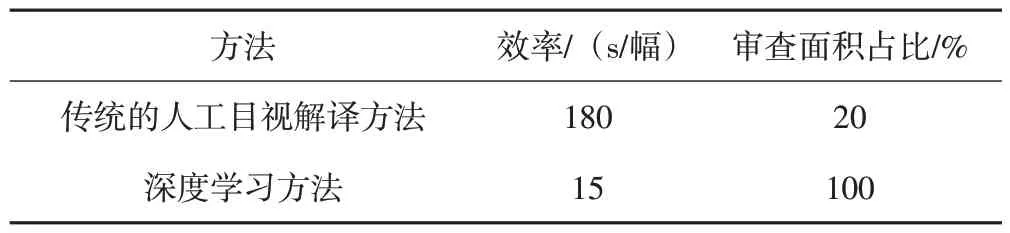
表5 傳統的人工目視解譯方法與深度學習方法對比分析
由上表可知,采用傳統的人工目視解譯方法效率為180 s/幅,本文方法效率為15 s/幅。傳統的人工目視解譯方法采用抽樣的方式進行審查,只關注易錯區域和包含敏感信息的區域,而本文方法全面審查地圖,能夠發現偶發錯誤,其審查面積占比明顯高于傳統的人工目視解譯方法。
由于本文選擇YOLOV7目標識別方法定位地理標志點,具有較高的置信度和檢測速度且占用內存較小,能夠快速為配準提供高精度的控制點位置;選擇配準方法對地圖進行預處理,使得地圖與標準參考地圖的吻合度更高;DeeplabV3 語義分割方法具有更高的分割精度和處理效率,對地圖的細節特征提取能力更強,其對地圖中的河流要素進行了準確的定位與提取;地圖線性要素走向偏差判定方法采用設定閾值的方式,能更靈活適應對河流審查的定制化標準。因此,本文的方法不僅具有較高的查準率和查全率,還可以廣泛運用于復雜多樣的地圖要素審查中。
3 討論
不同比例尺待審地圖的配準是決定判定進度的關鍵環節,為降低配準時的誤差對判定精度產生的影響,在標準參考地圖庫中準備大、中、小3 種級別比例尺的參考地圖,選取與待審地圖最接近的參考圖使配準過程中產生的誤差降低;其次,在多對配準點中選擇至少3 對以上作為地理目標點,通常選取最常見的易定位的地理標志,如省會城市、地級市和著名山峰等做參考,使獲取的候選點具有更高的魯棒性,且使得待審地圖上某些地理目標點不存在或難以查找和準確定位時,確保有其他候補地理目標點可用;此外,地理目標點的分布應盡量離散或靠近待審線性要素對象,以降低地圖幾何變換后待審線性要素對象與標準參考圖中的先行要素對象的誤差。不同比例尺下標準地圖選取以及地圖配準帶來的判定精度影響的定量分析還需進一步研究。
4 結論與展望
本文通過訓練目標識別和語義分割深度神經網絡,識別和提取寧夏回族自治區行政區劃地圖的地理目標和線性要素,在深度神經網絡的解譯結果基礎上對地圖線性要素走向進行判定,實驗結果表明具有較好的提取效果。本文僅對地圖的線性要素走向進行判定,且在線要素與點要素的位置關系判定中,對于不同復雜程度的地圖適用性未做進一步的實驗,下一步研究將針對不同類型的地圖測試方法的泛化性能。
猜你喜歡
城市道橋與防洪(2022年4期)2022-07-01 06:04:12
當代陜西(2019年8期)2019-05-09 02:22:48
動漫星空(興趣百科)(2019年3期)2019-03-07 07:23:10
Coco薇(2016年2期)2016-03-22 02:42:52
專用汽車(2016年4期)2016-03-01 04:13:43
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年4期)2015-05-19 14:47:56