新能源大基地風光火儲控制系統研究
2024-05-07 09:39:46劉孝鑫常雪劍張海英
電氣技術與經濟 2024年4期
朱 潔 劉孝鑫 于 佼 常雪劍 張海英
(中國電建集團西北勘測設計研究院有限公司)
0 引言
新能源基地混合能源控制系統是一種集成多種能源形式的系統,通過智能控制和優化算法,實現對不同能源的調度和協調管理,以提高能源的利用效率和系統的可靠性。混合能源控制系統是未來能源系統發展的一種趨勢,可以充分利用不同能源的特點,實現能源的高效利用和低碳排放。混合能源控制系統的研究旨在通過智能化控制和優化算法,實現多種能源的協調管理和高效利用,以促進能源系統的可持續發展和能源利用的優化。未來,隨著科技的發展和能源領域的進步,混合能源控制系統將會發揮越來越重要的作用,為能源產業的發展和能源利用的改善提供技術支持和創新方案[1-3]。
本文設計了一個風光火儲控制系統,解決新能源大基地多能源協調控制問題,提出基本算法、建立仿真平臺,實現控制功能。主要研究了混合可再生電力系統(HRPS)系統包含風能(WT)、火力發電(MT)、光伏(PV),電池儲能(ESS),以及傾卸負荷的并網和離網,WT/MT/電池的混合發電可以提供最合適的選擇,所提出的HRPS在切換控制和能量管理算法下運行。它根據不同的風速和負載條件使用所有的能源和存儲系統,該系統內來自WT以及MT的多余電力可以用于給電池充電,也可以發送到本地電網或卸載負載,與此同時,電池反應非常快,也證實了在風速突然變化的瞬態期間電網具有更好的穩定性。
1 混合能源系統的體系結構
整個系統由兩條總線組成;直流母線和交流母線。風力發電機(WT)、光伏發電(PV)、火力蒸汽輪機(ST)、電池儲能系統(ESS)和卸載負載連接到直流母線,而公用電網連接到交流母線。風能被視為主要來源。為了調節WT和ST的輸出電壓,使用了兩個非隔離的DC-DC升壓轉換器(用作電壓調節器),而電池的雙向功率流是通過降壓-升壓轉換器完成的。轉儲負載是與DC連接的電阻負載,以消耗系統中可能存在的任何剩余功率。卸載負載可以是任何電動車輛蓄電池或用于冷卻系統的空氣冷卻器。永磁同步發電機(PMSG)用于WT和ST。由于其自激特性,PMSG具有較高的功率因數和效率。理想情況下,直流母線上的凈功率應為零;因此,連接電池以利用系統提供的任何多余電力。直流母線的輸出通過三相變換器與交流母線同步。所有能源之間的電力傳輸和共享由開關控制和能量管理算法(SCEMA)管理。所提出的算法的動態性能和穩定性需要在一段時間內對混合系統進行仿真。因此,對每個不同部件進行穩態仿真模型。
2 系統組件的控制
2.1 風力發電控制
最佳扭矩控制用于通過改變渦輪機速度來獲取可變風速下的最大風力,而最佳葉尖速比λoрt不受影響。根據扭矩[4-5],風力渦輪機的機械功率PM為:
TM是渦輪機的機械扭矩,給出為:
根據風力渦輪機中提取最大功率的最佳扭矩控制原理。其中,ωM是用于計算參考扭矩的發電機轉速。使用發電機的額定參數來計算最佳扭矩的Tr。在穩定狀態下,發電機轉矩TM等于其參考轉矩Tr,并且達到最大功率點。
2.2 光伏發電控制
光伏發電最大功率點跟蹤器是一種電子DC-DC轉換器,它優化光伏電池板與電池存儲或傳統電網之間的匹配,以最大化輸出功率。太陽輻射和溫度對光伏系統的輸出功率特性有影響,其中輻照度和溫度曲線的目的是非線性的。此外,在白天,太陽輻射量會有出乎意料的變化。對于這些情況,當光伏的最大功率點連續移動時,光伏系統的工作點需要移動以最大化所產生的能量。因此,為了將光伏陣列的工作點保持在其最大功率點,使用了最大功率點跟蹤技術(MPPT)。
恒壓方法是MPP算法的穩定電壓,它在不可預測的環境條件下自發地調節參考電壓。隨著天氣條件的不同,一個簡單的模擬前饋脈寬調制控制器正在創建,以跟蹤太陽能電池陣列的最大功率點。由于其他恒壓MPPT方法的環境是由太陽能陣列電源配置的,因此在不破壞負載的整個電源的情況下測試開路電壓。基于對增量電導法在MPPT中使用公式的觀察
式中,IPV和VPV分別是PV陣列的電流和電壓。當P-V平面中的理想操作點位于MPP的右側時,我們具有(dIPVdVPV)+(IPVVPV)<0,而理想操作將位于最大功率點的左側,具有(dIPVdVPV)+(IPVVPV)>0。最大功率點之后是區分直接電導(IPVVPV)和增量電導(dIPVdVPV)。因此,數量標記(dIPVdVPV)+(IPVVPV)顯示了引起MPPT的擾動的適當方向。除非在達到最大功率點時注意到dIPV的變化,否則光伏陣列的運行保持在這一點并且擾動結束。在這種情況下,算法減少或增加Vr跟蹤新的最大功率點。
當MPPT達到時,理論上可以發現增量算法何時可以停止擾動。增量算法在快速變化的大氣條件下具有很好的性能。增量電導技術的優點是效率高,約為98%,可靠性高。而對于缺點,設計的復雜性是比較困難的。與其他技術相比,這種設計的成本更高,也更復雜。
2.3 火力發電控制
通常火力發電控制主要通過蒸汽輪機控制實現,ST通過調節兩個量來控制,即實際輸出功率和轉子速度。使用比例積分(PⅠ)控制器進行控制。在控制器之后,輸出受到渦輪機中的低值門的控制。渦輪機的輸出是機械功率需求,該機械功率需求被饋送到PMSG。
2.4 電池儲能系統的控制
DC/DC降壓-升壓轉換器將儲能系統ESS連接到DC總線。降壓模式用于給電池充電,而升壓模式用于對電池放電。比例-積分-微分(PⅠD)控制器用于控制電池的DC/DC降壓-升壓轉換器,如圖1所示。誤差信號是轉換器的輸出電流和參考電流之間的差,被饋送到PⅠD控制器。控制信號被提供給PWM發生器。DC/DC轉換器基于PWM發生器給出占空比產生輸出電流。

圖1 蓄電池儲能控制系統
3 SCEMA系統分析
切換控制與能量管理算法(SCEMA)通過WT、PV、ST、ESS、卸載負載和并網負載的協調,確認HRPS的連續工作。SCEMA操作分為兩層。在第一層中,SCEMA預測特定時間段的風速和負荷分布。在第二層中,根據風速和負荷分布以及能量備份狀態,決定每個子系統的運行條件。基于該要求,SCEMA為HRPS中所附的能源和/或功率轉換器提供控制信號。SCEMA采用操作方案如下:
WT被用作滿足負載需求的主要來源。如果WT未能滿足負載需求,則剩余負載被施加到ST。類似地,如果MT不能滿足電力需求,則剩余負載被施加PV以及電池系統上。最后,如果整個系統無法承受負荷需求,那么剩下的唯一選擇就是從當地電網電站進口電力類似地,如果WT最初滿足負載并產生大于負載需求的輸出,則多余的功率用于電池儲能系統充電。如果電池已經充滿電或充電緩慢,而系統中存在一些電力,則剩余電力將輸送到負載電網,然后再輸送到卸載負載。
4 實例分析
在設計的HPS中,使用了68kW的風力渦輪機,其切斷速度為12m/s,蒸汽輪機30kW,2×300Ah的電池儲能組,PV 20kW,100kW的主變流器和30kW的電阻卸載。對SCEMA在可變風速和動態載荷條件下的性能進行了評估。風力發電的最大功率是通過最佳扭矩控制獲得的,但SCEMA代表負載功率要求生成ST、ESS、PV卸載負載的參考。SCEMA中使用的控制策略確保了對負載的持續可靠供電。為了提供SCEMA所有運行模式的結果,考慮了一天的模擬。
圖2顯示了風力渦輪機每小時的可變風速和捕獲功率。從圖2中可以清楚地看出,當速度高時,會產生更大的功率,反之亦然。

圖2 風速剖面圖和WT輸出功率
為了更好地理解,取一天中的兩個時段的模擬結果被劃分為2個時隙,每個時隙6h。
本研究中為突出主要控制效果,搭建模型仿真時未考慮諧波影響,并濾除非必要的影響因素。
根據ⅠEEE 1547標準,負載均方根電壓、頻率和 THD的最大允許偏差分別為±6%、±0.8%和5%。負載均方根電壓和頻率分別為±0.05р.u和±0.008р.u。從圖3可以清楚地看出,所有的電能質量和穩定性參數都在可接受的范圍內,這說明使用HRPS系是穩定的。
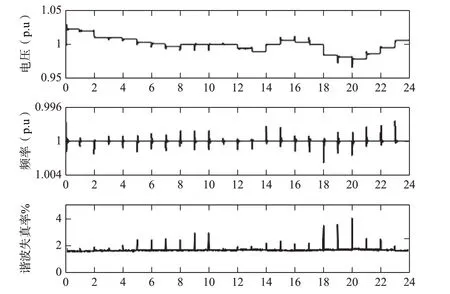
圖3 負載電壓方面的電能質量和穩定性參數(a)電壓(p.u) (b)頻率(p.u) (c)THD%
4 結束語
本文總結了新能源基地風能,光伏,火力發電,儲能系統和控制系統的結合,該混合能源系統為負荷提供24h的高可靠性輔助電力。所有系統組件都由各自的本地控制器控制,而之間的整體協調和能量管理則由開發的SCEMA實現。SCEMA的明顯優點是它可以保證24h的供電,并具有更好的電能質量。在風速和載荷變化的真實世界記錄下測試了所提出的HRPS的動態行為。通過仿真驗證了該系統的有效性。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
電機與控制應用(2021年12期)2021-02-28 07:55:52
海洋通報(2020年5期)2021-01-14 09:26:54
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
西南交通大學學報(2016年4期)2016-06-15 20:29:37
電測與儀表(2015年8期)2015-04-09 11:50:06