調(diào)制光學(xué)參量放大器對雙機械振子量子糾纏與壓縮的影響
2024-04-24 09:21:22杜宏杰郭金良
天津師范大學(xué)學(xué)報(自然科學(xué)版) 2024年1期
杜宏杰,郭金良
(天津師范大學(xué)物理與材料科學(xué)學(xué)院,天津 300387)
腔光力系統(tǒng)[1]是研究量子力學(xué)特性由介觀尺度到宏觀尺度的一種方法,其主要研究對象是機械振子與光腔間可控的輻射壓力相互作用.近年來,憑借潛在的應(yīng)用價值和前沿的研究成果,腔光力系統(tǒng)成為應(yīng)用工程科學(xué)和基礎(chǔ)研究科學(xué)的有力平臺.此外,量子糾纏作為量子物理學(xué)的基石,在量子理論基礎(chǔ)和量子信息處理等潛在應(yīng)用中具有重要的作用[2].宏觀糾纏不僅可以幫助科研人員闡明宏觀自由度由經(jīng)典世界到量子體系的轉(zhuǎn)變[3-5],而且在連續(xù)變量系統(tǒng)中也是重要的資源[6-7].因此,制備宏觀糾纏具有重要的意義.目前,已有研究在各種光學(xué)機械裝置中提出許多方案來產(chǎn)生量子糾纏,如通過光(微波)場與一個可動鏡間的直接輻射-壓力耦合產(chǎn)生光(微波)-機械糾纏[8],但該光-機械糾纏容易被系統(tǒng)的熱噪聲破壞.Mari 和Eisert[9-10]通過將周期性調(diào)制驅(qū)動場引入經(jīng)典光機系統(tǒng)極大地增強了光機糾纏,但受限于系統(tǒng)的穩(wěn)定性,糾纏強度仍無法超過1 ebits 的穩(wěn)態(tài)糾纏極限.此外,還有一種宏觀糾纏是2 個機械振子間的機械-機械糾纏,由于早期基于直接輻射-壓力相互作用方案制備所得機械-機械糾纏較脆弱[11-12],研究人員在光機系統(tǒng)中應(yīng)用了如直接機械耦合、壓縮真空光輸入、單光子強耦合或周期調(diào)制泵浦等技術(shù),但糾纏的增強量并不顯著.近年來,研究人員提出許多使2 個力學(xué)振子產(chǎn)生糾纏的方案,如利用糾纏交換[13]、使用壓縮光驅(qū)動雙腔[14]以及注入一對糾纏光束到獨立的2 個光學(xué)腔[15].Joshi 等[16]利用光纖對2 個不同的Fabry-Perot 腔進行耦合,但所得力學(xué)糾纏很小且受限于很低的熱溫度.Chen 等[17]利用周期性調(diào)制驅(qū)動,使由2 個力學(xué)模組成的光學(xué)腔壓縮復(fù)合模產(chǎn)生了較強的力學(xué)糾纏.實現(xiàn)宏觀振子的壓縮對精密測量的科學(xué)研究非常重要.近年來,研究人員通過各種非線性方案實現(xiàn)了機械振子的穩(wěn)態(tài)壓縮,如機械振子固有的非線性[18]以及系統(tǒng)中內(nèi)在的非線性耦合[19]或非線性介質(zhì)[20]等.Lu 等[21]利用非線性機械振子在腔光力系統(tǒng)中成功引入機械非線性,將系統(tǒng)動力學(xué)線性化,構(gòu)造有效哈密頓量制備機械壓縮.此外,熱庫方案通過不同頻率的2 個激光場驅(qū)動系統(tǒng)將哈密頓量線性化設(shè)計為非對稱的Rabi 型相互作用,實現(xiàn)了機械振子的穩(wěn)態(tài)強壓縮[22].
非線性介質(zhì)與光機系統(tǒng)的組合效應(yīng)使得強壓縮的制備變得容易,并取得了實質(zhì)性進展,如二階非線性簡并光學(xué)參量放大器(OPA)在產(chǎn)生壓縮光方面效果良好[23].實驗表明,放置在腔內(nèi)部的OPA 可以極大地增強機械冷卻,產(chǎn)生強的機械壓縮,并將單光子的光機耦合強度提升到強耦合狀態(tài),提高檢測光機位置的精度[24-27].Hu 等[28]通過調(diào)制OPA 增強機械糾纏,并將周期調(diào)制腔驅(qū)動和OPA 的參數(shù)驅(qū)動聯(lián)合,在腔光機系統(tǒng)中實現(xiàn)了雙重機械壓縮[29],但有關(guān)2 個機械振子間宏觀機械-機械糾纏的研究相對較少.
基于這種聯(lián)合驅(qū)動效應(yīng)的良好效果,本研究主要討論了在施加OPA 的腔光力系統(tǒng)中,OPA 對雙機械振子量子糾纏和壓縮的影響.通過對系統(tǒng)相關(guān)參數(shù)的討論以及求解系統(tǒng)穩(wěn)態(tài)的動力學(xué)演化,分析調(diào)制OPA對力學(xué)糾纏和壓縮的影響.
1 模型與哈密頓量
圖1 為由2 個機械振子和簡并的光學(xué)參量放大器(OPA)組成的復(fù)合腔光力系統(tǒng).

圖1 腔光力系統(tǒng)示意圖Fig.1 Schematic diagram of the cavity photomechanical system
圖1 系統(tǒng)中,2 個機械振子通過輻射壓力同時與1 個光腔耦合.機械振子的質(zhì)量為m,頻率為ωm,耗散為γm,頻率為ωc、衰減率為κ 的光腔被頻率為ωl、強度為E 的激光場驅(qū)動.此外,置于光腔中的OPA 被頻率為2ωp的泵浦激光驅(qū)動,其產(chǎn)生的參量增益為Λeiθ,該增益由泵浦激光的強度和相位共同決定.以驅(qū)動激光頻率ωl為旋轉(zhuǎn)框架,系統(tǒng)哈密頓量可以寫為(hˉ=1)
式(1)中:△0=ωc-ωl和Ω =2ωp-2ωl分別為光腔和簡并光子相對于驅(qū)動激光的失諧量;a 和a?為腔模的產(chǎn)生和湮滅算符;qj和pj分別為2 個振子的坐標(biāo)和動量算符,滿足對易關(guān)系[qj,pj]=ihˉ;g 為由輻射壓力引起的光腔和機械振子間的單光子光力耦合強度.
考慮到系統(tǒng)的耗散和漲落,式(1)中復(fù)合光力系統(tǒng)的動力學(xué)可用一組朗之萬方程(QLEs)描述,δO/δt=i[H,O]+N-Hdiss,其中N 為量子噪聲算符,Hdiss描述系統(tǒng)的耗散,O=pj,qj,a 為表征系統(tǒng)的算符,
式(2)中:ain(t)為平均值為0 的腔場輸入噪聲算符,滿足關(guān)聯(lián)函數(shù)〈〉= δ(t - t′)[19];ξj(t)為作用于機械振子的熱噪聲算符;在高品質(zhì)機械振子極限下Q≡ωm/γm>>1,滿足馬爾可夫近似,即〈ξj(t)ξj(t′)+ξj(t′)ξj(t)〉/2 = γm(2nm+ 1)δ(t - t′)[30],且nm=[exp(hˉωm/kBT)-1]-1表示機械振子的平均熱激發(fā)數(shù);kB為玻爾茲曼常數(shù);T 為環(huán)境的溫度.
當(dāng)腔場受到強激光驅(qū)動時,對朗之萬方程組(式(2))采用標(biāo)準(zhǔn)的線性化技術(shù)進行處理,將每個海森堡算符重寫為其穩(wěn)態(tài)平均值與微小漲落的和,即O=〈O(t)〉+δO,并通過對腔場進行強激光驅(qū)動使腔內(nèi)光子數(shù)〈a(t)〉滿足〈a(t)〉1.式(2)中,δp1、δp2和δa 為圍繞著穩(wěn)態(tài)平均值的小波動算子,在這種強激光驅(qū)動的情況下,可以安全地忽略非線性項.因此,式(2)可以通過忽略波動中高于一階項的項被線性化.關(guān)于經(jīng)典平均值〈O(t)〉的詳細討論在下面章節(jié)中,同時量子漲落部分δO 的線性化朗之萬方程可以表示為
式(3)中:△1(t)=△0-g〈q1(t)〉-g〈q2(t)〉為由機械運動產(chǎn)生的腔場的有效失諧;式(3)中已經(jīng)忽略掉非線性項[31],因此系統(tǒng)的有效哈密頓量可以表示為
2 系統(tǒng)的經(jīng)典動力學(xué)及其解析解計算
量子漲落部分(式(3))的演化與經(jīng)典動力學(xué)〈O(t)〉有關(guān),為研究系統(tǒng)的動力學(xué)演化,首先要求解經(jīng)典平均值.本文中相同頻率的2 個機械振子同時與1 個腔場耦合,因此認為其經(jīng)典動力學(xué)是相同的,即〈q1(t)〉=〈q2(t)〉=〈q(t)〉,〈p1(t)〉=〈p2(t)〉=〈p(t)〉,經(jīng)典平均值的演化可以通過以下非線性微分方程描述
雖然精確求解式(5)中的平均值非常困難,但如果系統(tǒng)遠離光力非穩(wěn)態(tài)和多穩(wěn)態(tài)時,可以用微擾的方式來處理光力耦合[8].在弱光力耦合強度為g 和頻率失諧為Ω 的條件下,將近似解析解展開為雙重冪級數(shù)的形式[32-33],即
將式(6)代入式(5)可得與時間無關(guān)的系數(shù)On,j(O=p,q,a,j =0)
當(dāng)j≥0 時,
圖2 為腔模平均值〈a(t)〉實部和虛部的時間演化關(guān)系及相空間軌跡圖,圖2(a)為通過數(shù)值解(藍色實線)和解析解(紅色虛線)所得腔模平均值〈a(t)〉的實部和虛部隨時間的演化圖像,其中時間單位τ =2π/Ω,所選系統(tǒng)參數(shù)為(單位為ωm)κ =0.1,Δ0=1.06,g =4×10-6,γm=10-6,E =1.4×104,nm=0,Λ =0.3κ,θ =0,Ω =2,截斷式(8)到|n|≤1 和j≤8.由圖2(a)可知,在長時極限下,〈a(t)〉的演化周期與調(diào)制周期τ =2π/Ω 相同,且解析結(jié)果(紅色虛線)與數(shù)值模擬結(jié)果(藍色實線)非常吻合,說明用微擾的方法求解解析解是可行的.圖2(b)為〈a(t)〉的相空間演化軌跡,其中紅線和藍線分別表示近似解析解和數(shù)值解.數(shù)值解給出的軌跡(藍線)在數(shù)百個調(diào)制周期后收斂為與分析結(jié)果(紅線)一致的極限環(huán).

圖2 腔模平均值〈a(t)〉實部和虛部的時間演化關(guān)系及相空間軌跡圖Fig.2 Time-evolution relations and phase-space trajectories of the real and imaginary parts of the mean value〈a(t)〉of a cavity mould
圖3 為機械模在不同時間間隔內(nèi)的相空間演化軌跡,藍色實線和紅色虛線分別為數(shù)值模擬結(jié)果和解析結(jié)果,所選參數(shù)與圖2 相同.

圖3 不同時間間隔力學(xué)模的經(jīng)典平均值〈q(t)〉和〈p(t)〉的相空間演化軌跡Fig.3 Phase space evolution trajectories of the classical mean〈q(t)〉and〈p(t)〉for the mechanical modes for different time intervals
由圖3 可知,由于γm=κ,經(jīng)典平均〈q(t)〉和〈p(t)〉在相空間中的演化需要260τ~280τ 才能演化到解析結(jié)果所預(yù)測的極限圓.
圖4 為系統(tǒng)達到穩(wěn)定時腔模平均值的模在時間間隔為895τ~900τ 內(nèi)的動力學(xué)演化關(guān)系,所選參數(shù)與圖2 相同.

圖4 系統(tǒng)達到穩(wěn)定時腔模平均值的動力學(xué)演化關(guān)系圖Fig.4 Kinetic evolution of the cavity mode average value when the system reaches stability
圖4 中,〈a(t)〉的解析解(虛線)與數(shù)值解(實線)擬合較好,進一步驗證了微擾近似解析解的準(zhǔn)確性.
3 力學(xué)糾纏與壓縮度量
為在數(shù)值上驗證第2 節(jié)中系統(tǒng)經(jīng)典動力學(xué)的定性討論,本研究通過負對數(shù)值來度量力學(xué)糾纏.首先,引入腔模的振幅和相位漲落算符δX=(δa+δa)?/和δY = (iδa - δa?)/及其相應(yīng)的噪聲算符δXin=則式(3)可以表示為u˙(t)=M(t)u(t)+n(t),其中u(t)T=(δq1,δp1,δq2,δp2,δX,δY),矩陣
式(9)中:n(t)T= [0,ξ(1t),ξ(2t),δXi(nt),δYin(t)],R1=-κ+2Λcos(Ωt-θ),R2=△-2Λsin(Ωtθ),R3=△-2Λsin(Ωt-θ),R4=-κ-2Λcos(Ωt-θ),G(Xt)和G(Yt)分別為有效耦合G(t)=g〈a(t)〉的實部和虛部.為了確保系統(tǒng)的穩(wěn)定性,Routh-Hurwitz準(zhǔn)則要求M(t)本征值的實部在任何時候都必須小于0[10].后文中所選參數(shù)均已驗證滿足穩(wěn)定性條件,系統(tǒng)最終會趨于一個穩(wěn)定的高斯態(tài).6 × 6 協(xié)方差矩陣V(t)可以描述這個高斯型系統(tǒng)的特性,矩陣元Vi,j=〈ui(t)uj(t)+uj(t)ui(t)〉/2.結(jié)合式(9)有
式(10)中:D=diag[0,-γm(2nm+1),0,-γm(2nm+1),κ,κ]為噪聲關(guān)聯(lián)矩陣.V˙(t)可以描述整個系統(tǒng)的動力學(xué)演化,同時通過數(shù)值模擬可以直接求解式(10).系統(tǒng)經(jīng)過一段時間的演化后,經(jīng)典動力學(xué)具有一個穩(wěn)定的周期時,可用負對數(shù)值EN度量雙模高斯態(tài)中的兩體糾纏.提取協(xié)方差矩陣V(t)的前四行和前四列,即可組成有關(guān)2 個力學(xué)模式的協(xié)方差矩陣
式(11)中:A、B 和C 分別為2×2 的子矩陣,負對數(shù)值
式(12)中
式(13)中:Σ(V)=detA+detB-2detC,如EN>0,即η<1/2,說明2 個力學(xué)振子間存在糾纏.
協(xié)方差矩陣V(t)的第1 個對角矩陣元V11(t)=〈δq(t)2〉和第2 個對角矩陣元V22(t)=〈δp(t)2〉分別表示力學(xué)振子的位移和動量漲落的方差.系統(tǒng)達到穩(wěn)定時,如滿足〈δq(t)2〉<1/2 或〈δp(t)2〉>1/2,則對應(yīng)的坐標(biāo)或動量分量被壓縮.力學(xué)壓縮的強度可用dB 為單位來度量,對應(yīng)的計算方式為-log10[〈δO(t)2〉/〈δO(t)2〉vac](O=p 或q)和〈δq(t)2〉vac=〈δp(t)2〉vac=1/2 分別表示力學(xué)模真空態(tài)的位移和動量方差.
4 結(jié)果與討論
4.1 機械糾纏
通過對負對數(shù)值EN進行數(shù)值模擬,分析OPA 對機械糾纏的影響.首先,給出OPA 的相位對機械糾纏EN的影響.圖5 為不同相位時,EN隨時間t 的變化圖像.圖5 中,E =6×104,其他參數(shù)與圖2 相同.由圖5可以看出,系統(tǒng)經(jīng)過一段時間的演化后,機械糾纏與經(jīng)典動力學(xué)一樣最終以周期τ 隨時間變化.因此,下文只考慮相位θ =0 的情況.

圖5 力學(xué)糾纏EN 在不同的參量相位下隨時間t 的演化關(guān)系Fig.5 Evolution of mechanical entanglement EN with time t for different parametric phases
由于機械糾纏的演化具有周期性,可以通過一個周期內(nèi)EN的最大值來量化機械糾纏的大小[34].即
圖6 為機械糾纏的最大值EN,max隨OPA 失諧量Ω/ωm的變化關(guān)系,圖6 中最佳失諧Ωopt/ωm=2.008,其他參數(shù)與圖5 相同.

圖6 最大機械糾纏EN,max 隨OPA 失諧量Ω/ωm 的變化關(guān)系Fig.6 Variation of maximum mechanical entanglement EN,max with OPA detuning Ω/ωm
由圖6 可以看出,存在最優(yōu)的調(diào)制頻率Ωopt/ωm=2.008 使EN,max最大,且由于光力耦合對光腔有效失諧△(t)的輕微修正,最優(yōu)調(diào)制頻率Ωopt接近但略大于2ωm,這正是前文討論中選取Ω =2ωm的原因.
為研究有限熱溫度和OPA 對機械糾纏的影響,圖7 為不同熱聲子數(shù)條件下以及OPA 的增益Λ 在有限溫度下機械糾纏隨時間的演化關(guān)系圖,圖7 中參數(shù)與圖5 相同.圖7(a)為不同熱聲子數(shù)nm=0(藍色)和nm=0.2(紅色)條件下機械糾纏隨時間的演化.圖7(b)為OPA 的增益Λ =0(藍色)和Λ =0.3κ(紅色)對有限溫度下機械糾纏演化的影響.
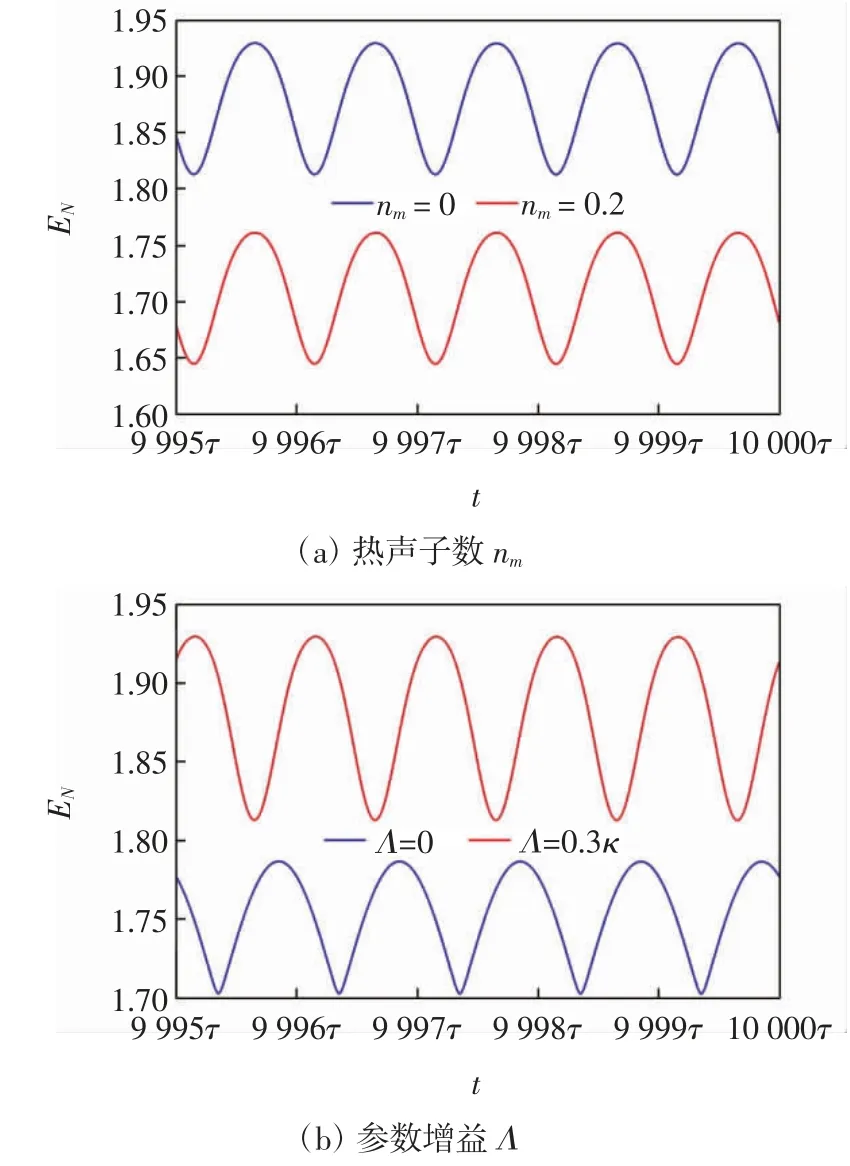
圖7 系統(tǒng)達到穩(wěn)定時機械糾纏EN 隨時間的演化關(guān)系Fig.7 Evolution of mechanical entanglement EN with time as the system reaches stability
由圖7(a)可以看出,隨著熱聲子數(shù)的增加,環(huán)境溫度的升高抑制了系統(tǒng)的量子效應(yīng),導(dǎo)致系統(tǒng)機械糾纏的值降低.由圖7(b)可以看出,與Λ =0 的情況相比較,隨著Λ 的增大,機械糾纏被增強,這表明在OPA 的輔助下機械糾纏可以在一個相對較大的熱聲子數(shù)條件下存在,即機械糾纏對熱噪聲具有很強的魯棒性.
4.2 壓縮效應(yīng)
最后,通過計算動量漲落的方差〈δp2〉研究調(diào)制OPA 對機械壓縮的影響.根據(jù)海森堡測不準(zhǔn)原理,當(dāng)〈δp2〉<1/2 時,機械振子的動量獲得壓縮.圖8 為OPA的增益Λ 取不同值時,〈δp2〉隨時間的變化,圖8 中其他參數(shù)與圖5 相同.

圖8 力學(xué)漲落的方差〈δp2〉隨時間的變化關(guān)系Fig.8 Variance of the force rise and fall〈δp2〉versus time
由圖8 可知,相比于Λ=0 的情況,隨著Λ 的增大,機械振子的動量壓縮被周期性加強.當(dāng)Λ=0.8κ 時,〈δp2〉最小值達到7.12 dB(對應(yīng)的動量方差〈δp2〉min=0.097 41),遠大于一般的機械壓縮,可以認為是強壓縮[35-37],這說明機械壓縮可以在調(diào)制OPA 的輔助下增強.
圖9 為熱聲子數(shù)nm對機械壓縮的影響,圖9 中其他參數(shù)與圖5 相同.

圖9 力學(xué)漲落的方差〈δp2〉隨時間的變化關(guān)系Fig.9 Varianceofthemechanicalriseandfall〈δp2〉versustime
由圖9 可以看出,〈δp2〉的最小值隨熱聲子數(shù)nm的增加略有增加,即使nm增大到500,仍可實現(xiàn)機械壓縮,因此系統(tǒng)產(chǎn)生的機械壓縮對環(huán)境溫度具有很強的魯棒性.
以上討論的機械壓縮是在邊帶可分辨的條件下,即ωm?κ.而標(biāo)準(zhǔn)的腔光力系統(tǒng)很難在實驗中獲得高品質(zhì)的腔,并滿足可分辨邊帶條件,因此討論在邊帶不可分辨條件(κ>ωm)下是否可以實現(xiàn)機械壓縮非常必要.
圖10 給出邊帶不可分辨條件(κ>ωm)下,力學(xué)漲落的方差〈δp2〉隨時間的變化關(guān)系,圖10 中其他參數(shù)與圖5 相同.

圖10 邊帶不可分辨條件(κ>ωm)下力學(xué)漲落的方差〈δp2〉隨時間的變化關(guān)系Fig.10 Variance of mechanical rise and fall〈δp2〉versus time under indistinguishable conditions(κ>ωm)in the sidebands
由圖10 可以看出,機械壓縮的程度隨著腔耗散率κ 的增加明顯減弱,但仍可以在邊帶不可分辨條件(κ>ωm)下實現(xiàn)機械壓縮.因此,在調(diào)制OPA 的輔助下,對于耗散較大(κ>ωm)的光力系統(tǒng)也可以實現(xiàn)機械壓縮.
5 結(jié)論
本文研究了與同一光腔耦合的2 個機械振子間的量子糾纏和機械壓縮.通過數(shù)值和解析求解經(jīng)典平均值的運動方程,分析了系統(tǒng)動力學(xué)的演化.計算結(jié)果表明,調(diào)制光學(xué)參量放大器對雙機械振子腔光力系統(tǒng)中的量子糾纏和機械壓縮效應(yīng)的影響均有良好的效果:
(1)對系統(tǒng)施加調(diào)制OPA,通過調(diào)節(jié)OPA 相對于驅(qū)動激光的失諧量可以增強2 個機械振子間的糾纏.
(2)在調(diào)制OPA 的輔助下,機械振子間的糾纏對系統(tǒng)的熱噪聲表現(xiàn)出很強的魯棒性.
(3)在邊帶可分辨條件下,通過調(diào)制OPA 的作用可以實現(xiàn)較強的機械壓縮,且對于邊帶不可分辨的情況,利用調(diào)制OPA 也可產(chǎn)生機械壓縮.因此調(diào)制OPA對于系統(tǒng)實現(xiàn)機械壓縮具有關(guān)鍵的作用.
猜你喜歡
工業(yè)設(shè)計(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
電腦報(2020年35期)2020-09-17 13:25:53
當(dāng)代工人(2020年8期)2020-05-25 09:07:38
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
電腦報(2019年40期)2019-09-10 07:22:44
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
小溪流(畫刊)(2017年12期)2018-01-10 16:07:29
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
