盾構機減速器多級行星齒輪磨損狀態(tài)檢測
2024-04-24 10:11:29馬帥
工程機械與維修 2024年1期
馬帥

摘要:齒輪運行狀況直接關系到盾構機減速器工作質(zhì)量,為了保證其正常工作,需針對盾構機制減速器多級行星齒輪磨損狀態(tài)進行定期檢測。針對齒輪進行檢測方法的設計,首先通過平移不變量小波降噪方法對減速器多級行星齒輪振動信號進行降噪處理,設置自適應局部閾值,分割出齒輪圖像嚙合區(qū),最后檢測點蝕區(qū)域。
關鍵詞:盾構機減速器;盾構機;齒輪磨損;多級行星齒輪
0? ?引言
盾構機在地下工程建設中發(fā)揮著越來越重要的作用,減速器作為盾構機的核心部件,其運行狀態(tài)直接影響到盾構機的性能和安全性。多級行星齒輪作為減速器的重要組成部分之一,其磨損狀態(tài)對減速器的性能和壽命具有重要影響。而對盾構機減速器多級行星齒輪磨損狀態(tài)進行檢測,則對于保障盾構機的正常運行,提高地下工程建設的安全性和效率具有重要意義。
傳統(tǒng)的行星齒輪磨損狀態(tài)檢測有2種:一是通過監(jiān)測風機齒輪油指標評價設備運行狀態(tài)的檢測方法[1],二是基于改進譜殘差的直齒圓柱齒輪嚙合磨損狀態(tài)的檢測方法[2]。上述方式費時費力,難以實現(xiàn)實時檢測。為解決上述問題,本文提出一種盾構機減速器多級行星齒輪磨損狀態(tài)檢測方法,可對行星齒輪磨損狀態(tài)的實時檢測,提高盾構機的運行安全性和效率。
1? ?減速器多級行星齒輪磨損狀態(tài)檢測設計
1.1? ?減速器多級行星齒輪振動信號降噪
1.1.1? ?采取降噪措施的必要性
在行星齒輪中,振動信號的采集和處理是至關重要的,因為這些信號包含了關于設備運行狀態(tài)的重要信息。然而,這些信號常常受到環(huán)境噪聲、設備內(nèi)部的電磁的干擾,導致信號中存在大量的噪聲[3]。這些噪聲的存在使得信號的整體平穩(wěn)性受到影響,進一步影響了磨損狀態(tài)檢測的準確性。
為了解決這一問題,需要采取有效的降噪措施,對采集到的振動信號進行處理。其中,平移不變量小波降噪方法是一種被廣泛應用的降噪技術。
1.1.2? ?平移不變量小波降噪原理
該方法利用小波變換的特性,對信號進行多尺度分析,從而將噪聲和有用信號分離。通過這種方式可以有效地去除信號中的噪聲,提高信號的平穩(wěn)性,進一步提高了磨損狀態(tài)檢測的準確性。
假設采樣離散數(shù)據(jù)為XH,獲取與之對應的正交小波變換方法,得到行星齒輪箱振動信號的正交小波變換分解公式:
(1)
式中:dj表示尺度系數(shù);FA表示小波系數(shù);n表示濾波處理次數(shù);k表示常數(shù)。
從信號濾波的角度來看,正交小波分解是一種有效的信號處理方法[4]。在正交小波分解過程中,離散信號通過一系列的高通濾波器和低通濾波器進行處理,從而提取出信號中的高頻信息和低頻信息。
這種處理方式能夠有效地濾除信號中的噪聲和其他干擾成分,保留信號中的有用信息,為后續(xù)的信號分析和處理提供重要基礎。正交小波分解在信號濾波中扮演著重要的角色,能夠提高信號的清晰度和可理解性,為各種應用領域提供強大的技術支持。
信號重構過程DFG可以表示為公式(2)的形式:
DFG=x(t)×λ? ? ? ? ? ? ? ? ? (2)
式中:λ表示小波分解的層數(shù)。
1.1.3? ?降噪步驟
將被噪聲污染的信號恢復原始信號,對應的減速器多級行星齒輪振動信號降噪步驟如下所示。
步驟一:將采集到的行星齒輪振動信號作為輸入。
步驟二:采用正交小波變換技術,對含噪聲的信號進行處理,通過小波分解,將噪聲信號分解為多個子信號,每個子信號都對應一組小波系數(shù)。這些系數(shù)中包含噪聲成分和重要的信號特征。
步驟三:對行星齒輪振動信號實行多次循環(huán)平移處理。對應的計算式為:
WG=Av×Sn×σO×DFG? ? ? ? ? ?(3)
式中:WG表示多次循環(huán)平移處理結果;Av表示平移循環(huán)算子;Sn表示方值差根;σO表示軟閾值。
步驟四:通過平移不變量降噪方法中的軟閾值降噪方法,對信號降噪處理。對應的軟閾值函數(shù)可以表示為公式(4)的形式:
(4)
式中:Tμ表示時間維度特征。
步驟五:再次對振動信號反方向平移處理,同時求解處理結果的平均值。
步驟六:輸出減速器多級行星齒輪振動信號降噪。
1.2? ?分割齒輪圖像嚙合區(qū)
1.2.1? ?網(wǎng)格區(qū)域分割方法選取
當齒輪區(qū)域位于網(wǎng)格區(qū)域的邊緣時,應用閾值方法可將導致網(wǎng)格區(qū)域不完全分割。齒輪的區(qū)域位置擁有不一樣的高度,且不同高度的齒輪磨損區(qū)域在圖像中呈現(xiàn)不同的數(shù)值。本文采用一種將區(qū)域分割、區(qū)域聚合和邊緣校正相結合的網(wǎng)格區(qū)域分割方法。
使用區(qū)域分割方法能夠避免檢測到低灰度網(wǎng)格區(qū)域。大區(qū)域聚合算法識別候選網(wǎng)格區(qū)域中的網(wǎng)格區(qū)域,可將其作為一個整體進行組合,以得到網(wǎng)格區(qū)域。再根據(jù)原網(wǎng)格區(qū)域的地形特點,對原網(wǎng)格區(qū)域的邊界加以調(diào)整。其克服了因位于原網(wǎng)格區(qū)域邊界上點蝕所引起的不完整劃分問題,從而得到了原網(wǎng)格區(qū)域的最后劃分結果。
1.2.2? ?自適應局部閾值計算
各個小齒輪磨損部位的灰度特征都不相同,為此不適宜采用全局切割技術。經(jīng)過修改后的網(wǎng)格區(qū)的邊界,通常包括一些具有較低灰度值的背景區(qū)域,這部分背景區(qū)域具有相似的點蝕灰度特征。
本文使用自適應局部閾值分割來獲得候選區(qū)域,并根據(jù)形狀特征從候選區(qū)域中去除假陽性區(qū)域。自適應局部閾值的表達式如下所示:
Q? =(A1×A2)×SF×σO? ? ? ? ? ?(5)
式中:A1、A2分別表示源域與目標域的期望;SF表示張量積在盾構機減速器多級行星齒輪空間中的特征映射。
1.2.3? ?獲取網(wǎng)格區(qū)域候選項
為了減少網(wǎng)格區(qū)域的分割誤差,基于類網(wǎng)格區(qū)域的劃分結果,進行此部分分段,以獲取網(wǎng)格區(qū)域的候選項,確定上下部區(qū)域的分割結果是否正確。如果區(qū)域分割結果不正確則需要改進。
1.2.4? ?確定類網(wǎng)格劃分區(qū)域分割是否正確
在相似的齒輪類型中,不同的齒面具有相同的高度。不一樣齒輪表面上網(wǎng)格區(qū)域的高度基本上一致。假設系數(shù)閾值是Thi,則可以使用Hei網(wǎng)格劃分區(qū)域的分割結果的高度,來確定類網(wǎng)格劃分區(qū)域分割是否正確,具體公式為:
Hei =Thi×O?? ? ? ? ? ? ? ? (6)
當公式(6)成立時,即可判斷出區(qū)域分割是不正確的。
1.2.5? ?獲取齒輪圖像嚙合區(qū)
系數(shù)閾值Thi是由齒輪嚙合區(qū)的高度來確定的,考慮到可能會有一部分齒輪表面圖像當中,Thi的取值可能小于嚙合區(qū)寬度。對此通過公式(7)獲取齒輪圖像嚙合區(qū):
H(ω,t)=Hei×η×γ? ? ? ? ? ? ? ?(7)
式中:η代表信號的時頻譜;γ表示調(diào)頻信號。
根據(jù)上述公式計算,將源域與目標域中振動信號深度特征,映射至盾構機減速器多級行星齒輪空間中。在新的特征空間中,確定振動信號實際分類識別結果與預期結果之間的誤差,并以最小化誤差對目標對網(wǎng)絡參數(shù)進行微調(diào)。最后通過微調(diào)后的參數(shù),對輸入盾構機減速器多級行星齒輪振動信號樣本進行分類識別,從而分割出齒輪圖像嚙合區(qū)結果。
1.3? ?檢測點蝕區(qū)域
具有不同深度的閾值具有不同的調(diào)用比例值。首先,使用自適應局部分支分割來獲得候選分支區(qū)域,然后候選區(qū)域中的偽候選區(qū)域采用形式函數(shù)。
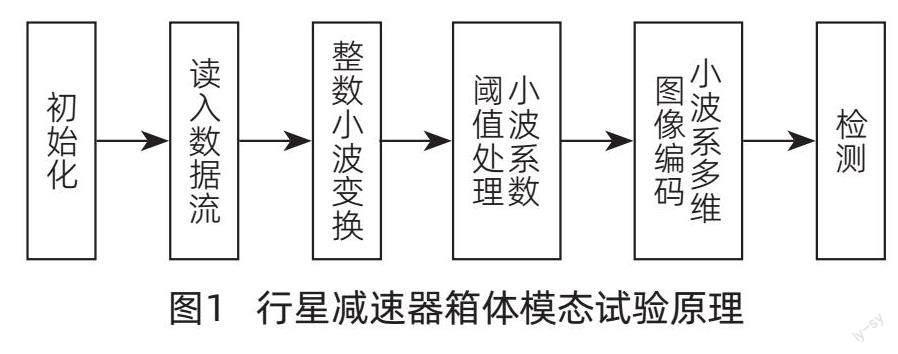
脈沖激勵是一種過渡激勵方法,理論上脈沖函數(shù)在無限頻率范圍內(nèi)是連續(xù)和恒定的,能量主要集中在基于頻率的區(qū)間內(nèi)。行星減速器箱體模態(tài)試驗原理圖如圖1所示。
由圖1可知,先讀入數(shù)據(jù)流,再對閾值進行處理,最后進行檢測。檢測所需要的主要儀器設備如表1所示。為了確定減速器箱體的主要性質(zhì),試驗采用的是自由支撐的邊界要求,進而完成檢測[5]。
2? ?對比試驗
2.1? ?實驗說明
將文中盾構機減速器多級行星齒輪磨損狀態(tài)檢測方法作為實驗組,通過監(jiān)測風機齒輪油指標評價設備運行狀態(tài)檢測方法,基于改進譜殘差的直齒圓柱齒輪嚙合磨損狀態(tài)檢測方法,分別作為對照組A和對照組B,將3種方法進行對比。
2.2? ?實驗準備
試驗選擇多個點激振單點拾振脈沖激勵法來進行信號采集,從而得到數(shù)據(jù)。行星齒輪箱相關參數(shù)如表2所示。
設定實驗采集信號的頻率為11500Hz,采樣的時間設為15s,齒輪箱主軸轉(zhuǎn)速為19r/min。
2.3? ?檢測結果
原始齒輪磨損圖像如圖2所示。文中方法磨損圖像檢測結果如圖3所示。對照組A方法檢測結果如圖4所示。對照組B方法檢測結果如圖5所示。
從圖2、圖3、圖4和圖5可以看出,本文方法檢測齒輪磨損的結果和齒輪原始磨損位置一樣,但是對照組A方法和對照組B方法無法檢測出齒輪磨損的所有位置。由此可知,本文方法能夠準確檢測出齒輪磨損狀態(tài),齒輪磨損狀態(tài)檢測效果良好。
將迭代次數(shù)設置為500次,并采用對照組A方法、對照組B方法和本文方法進行對比,得到不同方法的檢測正確率測試結果如圖6所示。
通過圖6可以看出,在500次迭代的過程中,本文方法的齒輪磨損狀態(tài)檢測正確率平均能夠達到90%左右,而對照組A方法、對照組B方法的齒輪嚙合磨損狀態(tài)檢測正確率均值平均大概在70%左右,均低于本文方法。由此可知,采用本文方法檢測的齒輪磨損狀態(tài)正確率高于對照組A方法、對照組B方法。
3? ?結束語
齒輪運行狀況直接關系到盾構機減速器工作質(zhì)量,為了保證其正常工作,需針對盾構機減速器多級行星齒輪磨損狀態(tài)進行定期檢測。本文介紹盾構機減速器中多級行星齒輪磨損狀況的分析方法,應用這種測定方法可以大大提高對多級行星齒輪磨損狀況測定的準確性,遠超對照組A方法、對照組B方法。經(jīng)過比較分析表明,結果和試驗資料存在良好的一致性,兩者的時間偏差較小。振型設計相似,共同證明了基礎研究和試驗技術的有效性。
參考文獻
[1] 賈敏.通過監(jiān)測風機齒輪油指標評價設備運行狀態(tài)[J].化工
時刊,2021,35(3):25-27+46.
[2] 蔡聰藝.基于改進譜殘差的直齒圓柱齒輪嚙合磨損狀態(tài)檢測
方法[J].沈陽工程學院學報(自然科學版),2022,18(1):86-90.
[3] 高云端,田野,朱永波,等.基于稀疏注意力機制的齒輪早期
磨損故障診斷研究[J].機械傳動,2023,47(3):105-112.
[4] 畢浩程,蔣章雷,吳國新,等.基于SSA-VMD和2.5維譜的
齒輪箱磨損故障診斷[J].機床與液壓,2023,51(6):181-187.
[5] 張建偉,桂敏,王洪全,等.某型發(fā)動機上垂直錐齒輪軸承異
常磨損故障分析[J].航空維修與工程,2023,382(4):45-47.