光譜共焦傳感器多參數(shù)高準(zhǔn)確度校準(zhǔn)
2024-04-19 12:13:04楊品澒崔建軍宋佩頡
計(jì)量學(xué)報(bào) 2024年3期
關(guān)鍵詞:測量
楊品澒, 唐 波, 崔建軍, 陳 愷, 宋佩頡, 彭 璐
(1.中國計(jì)量大學(xué) 計(jì)量測試工程學(xué)院,浙江 杭州 310018;2.中國計(jì)量科學(xué)研究院,北京 100029;3.甘肅省計(jì)量研究院,甘肅 蘭州 730071;4.西藏自治區(qū)計(jì)量測試所,西藏 拉薩 850010;5.交通運(yùn)輸部 公路科學(xué)研究院,北京 100029)
1 引 言
光譜共焦傳感器是一種基于光譜共焦成像原理[1]的非接觸式單點(diǎn)緊湊型光學(xué)傳感器,可實(shí)現(xiàn)高準(zhǔn)確度的位移和厚度等的測量[2]。相對于激光干涉儀、電容式測微儀和光柵式測微儀等微位移測量儀器,光譜共焦傳感器具有結(jié)構(gòu)簡單、抗干擾能力強(qiáng)、實(shí)時(shí)性高、層析特性好等優(yōu)點(diǎn),在微電子、醫(yī)學(xué)儀器、工程材料以及航空航天等領(lǐng)域具有廣泛的應(yīng)用[3,4]。目前高準(zhǔn)確度光譜共焦傳感器的準(zhǔn)確度已經(jīng)達(dá)到了納米級。例如,我國海伯森公司的光譜共焦傳感器重復(fù)性為60 nm,深視智能公司的光譜共焦傳感器重復(fù)性為12 nm,線性誤差為300 nm;英國ZSY GROUP Ltd的EVCD10光譜共焦傳感器在110 μm的量程內(nèi)線性度為44 nm;德國MICRO-EPSILON的光譜共焦傳感器在100 μm的量程內(nèi)線性度為33 nm。這些日益提高的技術(shù)指標(biāo)對其校準(zhǔn)裝置和校準(zhǔn)方法在準(zhǔn)確度上提出了更高的要求。而目前仍以測長機(jī)和激光干涉位移測量裝置等通用計(jì)量設(shè)備為主,尚缺少專用的光譜共焦傳感器校準(zhǔn)裝置。測長機(jī)準(zhǔn)確度上仍然難以滿足高準(zhǔn)確度光譜共焦傳感器的校準(zhǔn)需求[5,6];而激光干涉位移測量裝置雖然能夠?qū)?zhǔn)確度較高的光譜共焦傳感器進(jìn)行校準(zhǔn),但是由于存在周期性非線性誤差[7~11],其峰峰值通常可達(dá)到6~20 nm,使得其測量準(zhǔn)確度也難以進(jìn)一步提高。對于高準(zhǔn)確度位移校準(zhǔn)裝置而言,它的位移發(fā)生部件(如精密位移臺(tái))也往往存在幾納米甚至數(shù)十納米的回程誤差和重復(fù)性。這對于納米級位移測量,會(huì)導(dǎo)致各受檢點(diǎn)的位移標(biāo)準(zhǔn)值不完全一致,進(jìn)而影響測量的準(zhǔn)確性。
本文在傳統(tǒng)激光干涉位移測量裝置的基礎(chǔ)上通過設(shè)計(jì)和優(yōu)化測控方式等技術(shù)手段,構(gòu)建了一種可滿足光譜共焦傳感器準(zhǔn)確度要求的校準(zhǔn)方法,通過提出的基于波長倍數(shù)的等間隔測量方法以及測點(diǎn)修正算法,減小了校準(zhǔn)裝置中激光干涉儀非線性誤差和精密位移臺(tái)定位準(zhǔn)確度等對測量結(jié)果的影響,并設(shè)計(jì)了測量實(shí)驗(yàn),給出了測量不確定度評定方法。
2 裝置設(shè)計(jì)
2.1 光譜共焦傳感器測量原理
白光源S發(fā)出的白光經(jīng)過物鏡L后照射在被測物體表面,多種單色光組成的白光經(jīng)過物鏡L,由于色散而形成不同波長的單色光,如圖1所示。不同波長(λ1、λM和λ2)的單色光聚焦距離不同,各單色光中只有波長為λM的單色光能夠在被測物體表面上M點(diǎn)處完全聚焦并被接收,而其它離焦?fàn)顟B(tài)的單色光不會(huì)被接收。

圖1 光譜共焦原理圖Fig.1 Color confocal principle drawing
被接收的波長為λM的聚焦光會(huì)形成峰值,通過對接收到的峰值波長進(jìn)行解調(diào)計(jì)算,即可獲得目標(biāo)物體與物鏡之間的相對距離[12]。軸向光學(xué)坐標(biāo)位置與波長關(guān)系如式(1)所示:
(1)
式中:u為歸一化的軸向光學(xué)坐標(biāo)位置;λM為光學(xué)共焦系統(tǒng)的工作波長;δz為某一單色光聚焦點(diǎn)相對共焦焦點(diǎn)的實(shí)際軸坐標(biāo);a為色散物鏡的孔徑;f為色散物鏡的焦距;kM為波數(shù)。
由光譜共焦測量原理可知,通過探測軸向光學(xué)坐標(biāo)位置,可實(shí)現(xiàn)物體表面形貌以及位移距離等精確測量,在實(shí)際測量過程,測量結(jié)果還與被測物體表面的材質(zhì)、光學(xué)反射率、粗糙度等物理屬性相關(guān)[13~16],但是通過校準(zhǔn)裝置實(shí)現(xiàn)高準(zhǔn)確度校準(zhǔn)是它實(shí)現(xiàn)精密測量的技術(shù)前提和關(guān)鍵技術(shù)。
2.2 校準(zhǔn)裝置硬件設(shè)計(jì)
光譜共焦傳感器校準(zhǔn)裝置(如圖2所示)主要由激光干涉儀(激光器、光學(xué)組鏡、環(huán)境補(bǔ)償器等)、精密位移臺(tái)、精密位移臺(tái)控制器、反射板、測頭夾具、計(jì)算機(jī)等組成。
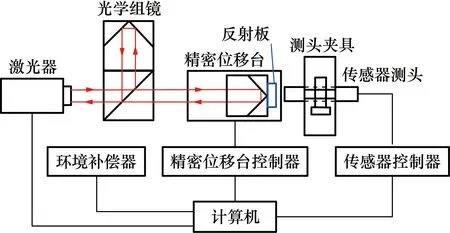
圖2 光譜共焦傳感器校準(zhǔn)裝置示意圖Fig.2 Schematic diagram of calibration device for spectral confocal sensor
圖2中,激光干涉儀的線性分辨率為0.1 nm,經(jīng)檢定知其測長不確定度(B類):U=5 nm+2.0×10-7L(k=2),用于提供位移標(biāo)準(zhǔn)值;精密位移臺(tái)經(jīng)校準(zhǔn)知其技術(shù)指標(biāo):量程50 mm、最小步進(jìn)2 nm、重復(fù)定位準(zhǔn)確度30 nm、最大角晃動(dòng)量5″,用于提供位移變化量;精密位移臺(tái)控制器在計(jì)算機(jī)的指令下控制精密位移臺(tái)的運(yùn)動(dòng);反射板(白色陶瓷量塊)固定在精密位移臺(tái)上,并隨精密位移臺(tái)運(yùn)動(dòng),且反射面垂直于運(yùn)動(dòng)軸線。測頭夾具固定不動(dòng),用于夾持傳感器測頭,且保證其測量方向與精密位移臺(tái)運(yùn)動(dòng)方向一致。環(huán)境補(bǔ)償器用于對激光波長進(jìn)行環(huán)境參數(shù)補(bǔ)償;計(jì)算機(jī)獲取激光干涉儀示值的同時(shí),經(jīng)傳感器控制器實(shí)現(xiàn)光譜共焦傳感器示值的同步采集。
2.3 校準(zhǔn)裝置軟件設(shè)計(jì)
軟件包括:儀器連接、位移控制、自動(dòng)采集、環(huán)境補(bǔ)償及數(shù)據(jù)分析模塊。功能設(shè)計(jì)內(nèi)容如圖3所示。儀器連接模塊用于實(shí)現(xiàn)計(jì)算機(jī)和激光干涉儀、精密位移臺(tái)及被測光譜共焦傳感器的數(shù)據(jù)通訊;位移控制模塊內(nèi)置控制算法(位移反饋控制),用于控制精密位移臺(tái)的移動(dòng),同時(shí)用于設(shè)置測控過程的技術(shù)參數(shù);自動(dòng)采集模塊用于采集激光干涉儀和被測光譜共焦傳感器控制器的輸出信號(hào);環(huán)境補(bǔ)償模塊用于測量溫度、氣壓和濕度等環(huán)境參數(shù),計(jì)算空氣折射率并對空氣中的激光波長進(jìn)行實(shí)時(shí)補(bǔ)償;數(shù)據(jù)分析模塊用于分析處理測量過程數(shù)據(jù)和解算被測光譜共焦傳感器的計(jì)量特性參數(shù)。

圖3 控制分析軟件設(shè)計(jì)內(nèi)容Fig.3 control analysis software design content drawing
軟件各模塊相互協(xié)作,使受檢點(diǎn)之間的位移間隔為激光波長的整數(shù)倍,來減小激光干涉儀非線性誤差對測量的影響;同時(shí)通過激光干涉儀示值反饋,實(shí)現(xiàn)了精密位移臺(tái)定位準(zhǔn)確度的提高。
3 關(guān)鍵技術(shù)
3.1 位移反饋控制
位移反饋控制的核心在于根據(jù)激光干涉儀示值調(diào)整精密位移臺(tái)的位置,以顯著提高校準(zhǔn)裝置的定位準(zhǔn)確度。首先在測量前設(shè)定精密位移臺(tái)的控制閾值;然后控制精密位移臺(tái)按位移間隔ΔLi移動(dòng);最后計(jì)算激光干涉儀示值與ΔLi的差值,并用該差值與控制閾值進(jìn)行比較。若該差值小于設(shè)定的閾值,則精密位移臺(tái)按位移間隔ΔLi+1向下一個(gè)采集點(diǎn)進(jìn)行移動(dòng)。若差值大于控制閾值,則精密位移臺(tái)將該差值作為位移量進(jìn)行移動(dòng),移動(dòng)完成后重新計(jì)算差值,并與控制閾值進(jìn)行比較。反復(fù)進(jìn)行上述過程,直到完成對N個(gè)受檢點(diǎn)的采集。位移反饋控制的流程框圖如圖4所示。通過位移反饋控制,能夠使精密位移臺(tái)的位移量與設(shè)定值之間的差值不超過6 nm。

圖4 位移反饋控制流程框圖Fig.4 Displacement feedback control flow diagram
3.2 波長倍數(shù)間隔測量法
校準(zhǔn)裝置采用的激光干涉儀(波長λ約為633 nm),經(jīng)中國計(jì)量科學(xué)院(NIM)的雙頻激光干涉儀標(biāo)準(zhǔn)裝置測試,其存在周期為λ/2的非線性誤差,其幅值的峰峰值10 nm,測試結(jié)果如圖5所示。
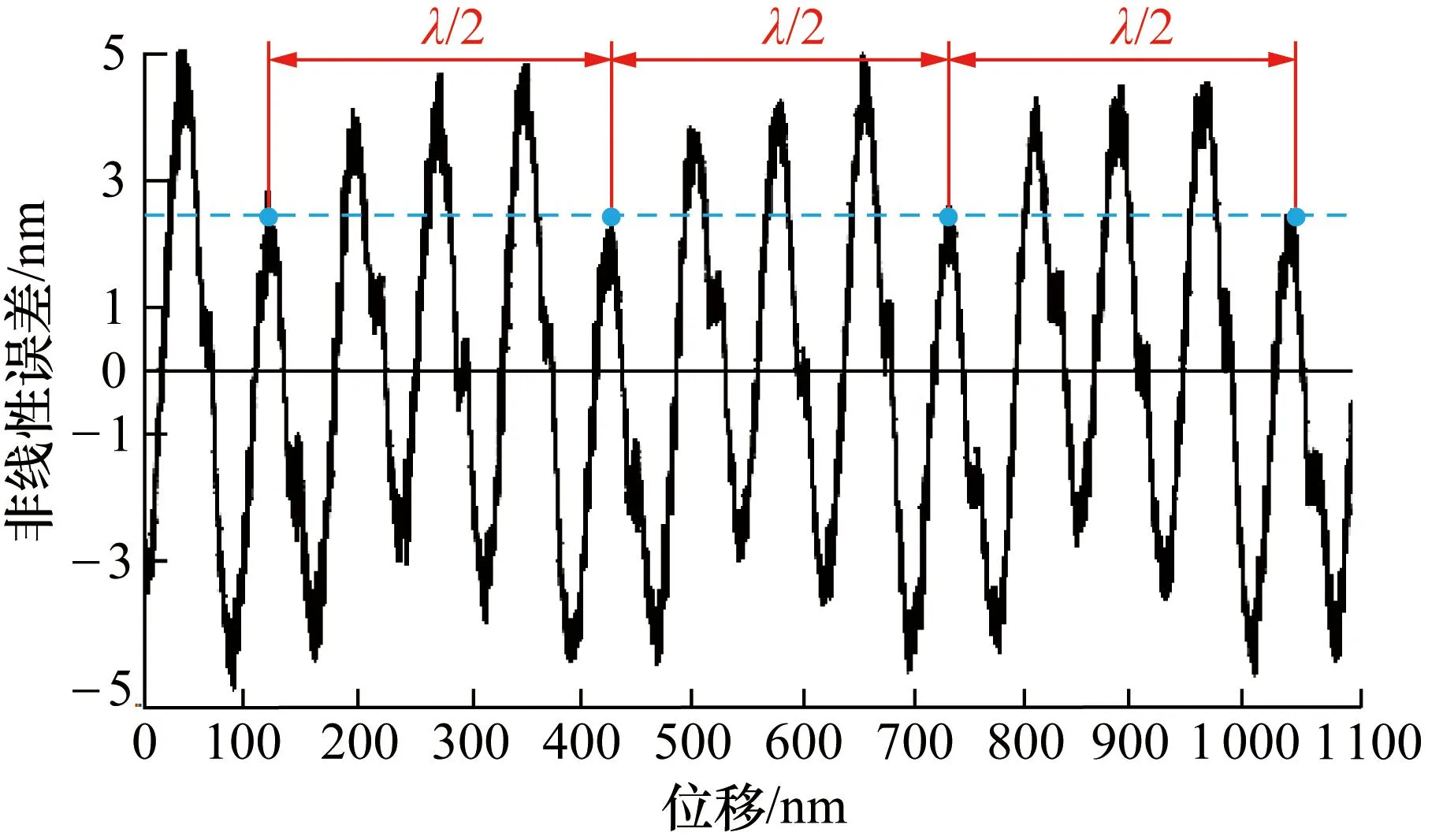
圖5 激光干涉儀非線性誤差Fig.5 Nonlinear error of laser interferometer
可通過對位移間隔進(jìn)行取整,使其長度為激光波長的倍數(shù),來減小激光干涉儀非線性誤差對測量結(jié)果產(chǎn)生的影響。通過取整運(yùn)算,如式(2)所示。
(2)
式中:ΔLi為第i個(gè)受檢點(diǎn)的位移間隔;[]表示取整;N為采集點(diǎn)數(shù);λ為激光干涉儀的波長;YFS為光譜共焦傳感器的標(biāo)稱滿量程。
該方法可以使激光干涉儀非線性誤差對位移測量的影響降低至2 nm甚至更小,從而提高了激光干涉儀使用時(shí)的測量準(zhǔn)確度。
3.3 測點(diǎn)修正算法
由于精密位移臺(tái)的定位準(zhǔn)確度遠(yuǎn)大于激光干涉儀示值,使得在同一受檢點(diǎn)各次測量的激光干涉儀示值不完全相同,導(dǎo)致被測光譜共焦傳感器的重復(fù)性、回程誤差和線性度等技術(shù)指標(biāo)無法直接計(jì)算。故而提出了測點(diǎn)修正算法,其原理是:在某受檢點(diǎn)處,被測光譜共焦傳感器示值減去激光干涉儀示值,得到的差值作為某受檢點(diǎn)處的示值誤差。下面分析該算法的可行性。
設(shè)i為受檢點(diǎn)序號(hào),j為測量行程次序數(shù),受檢點(diǎn)位置為xi,Sij為激光干涉儀示值,Yij為被測光譜共焦傳感器示值,Δij為二者的示值誤差。則有:
Δij=Yij-Sij
(3)
激光干涉儀示值Sij與受檢點(diǎn)位置xi的間距dij為:
dij=Sij-xi
(4)
隨著受檢點(diǎn)位置變化,被測光譜共焦傳感器示值與激光干涉儀示值存在線性關(guān)系,如圖6所示。
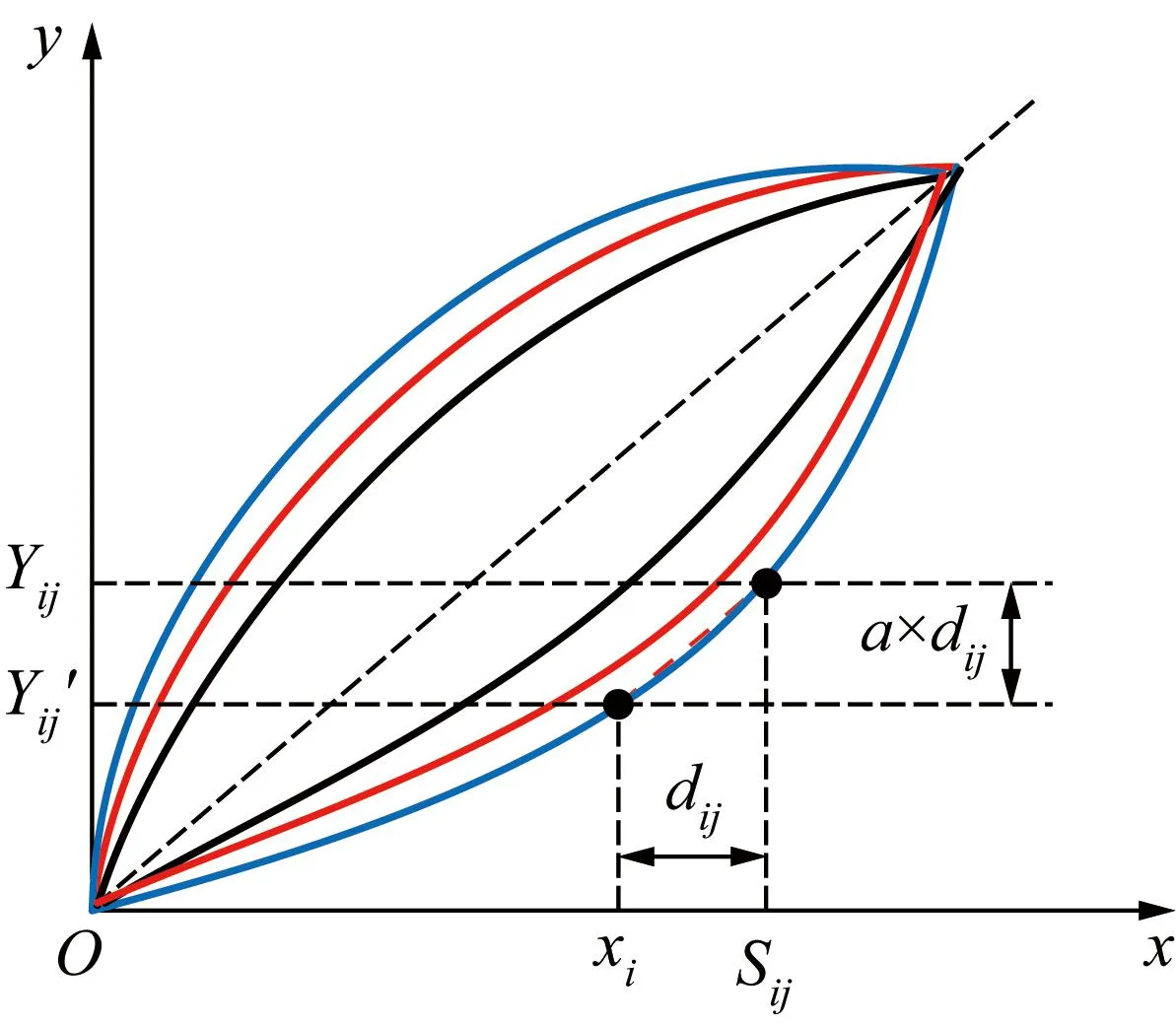
圖6 示值變化線性關(guān)系圖Fig.6 Linear relationship of indicated values drawing

(5)

(6)
(7)
若激光干涉儀示值Sij與受檢點(diǎn)位置xi相距較遠(yuǎn),即dij較大時(shí),式(7)會(huì)引入較大誤差,此時(shí)的示值誤差為:
(8)
不同斜率a與不同間距dij時(shí),測點(diǎn)修正算法引入的偏差如表1所示。

表1 不同斜率和間距時(shí)測點(diǎn)修正會(huì)引入的偏差Tab.1 The bias introduced when the measurement point is corrected with different slope and spacing
4 測量實(shí)驗(yàn)
4.1 實(shí)驗(yàn)過程
對某量程為100 μm的光譜共焦傳感器的示值誤差和重復(fù)性進(jìn)行測量。
在實(shí)驗(yàn)過程中,將被測光譜共焦傳感器的測頭固定在測頭夾具上,通過光學(xué)準(zhǔn)直技術(shù),調(diào)整傳感器測頭的位置和姿態(tài),以確保測量過程符合阿貝原則。精密位移臺(tái)進(jìn)行移動(dòng),計(jì)算機(jī)同步采集激光干涉儀和被測光譜共焦傳感器控制器的示值,并進(jìn)行分析處理。
4.2 實(shí)驗(yàn)結(jié)果
1) 參照J(rèn)JF 1663—2017《激光測微儀校準(zhǔn)規(guī)范》[17],各受檢點(diǎn)的示值誤差計(jì)算如式(9)所示:
(9)
式中:δi為第i個(gè)受檢點(diǎn)的示值誤差。各受檢點(diǎn)示值誤差結(jié)果如圖7所示。

圖7 示值誤差校準(zhǔn)曲線Fig.7 Indication error calibration curve drawing
由測量數(shù)據(jù)分析可得,在100 μm量程內(nèi),示值誤差為±0.02%,用絕對數(shù)值表示,則最大的示值誤差約為±23 nm。
2) 參照J(rèn)JF 1305—2011《線位移傳感器校準(zhǔn)規(guī)范》[18],第i個(gè)受檢點(diǎn)的重復(fù)性如式(10)所示:
(10)
式中:ri為第i個(gè)受檢點(diǎn)的重復(fù)性;Δi為各點(diǎn)同向行程中的最大差值,μm。各受檢點(diǎn)的重復(fù)性如圖8所示。
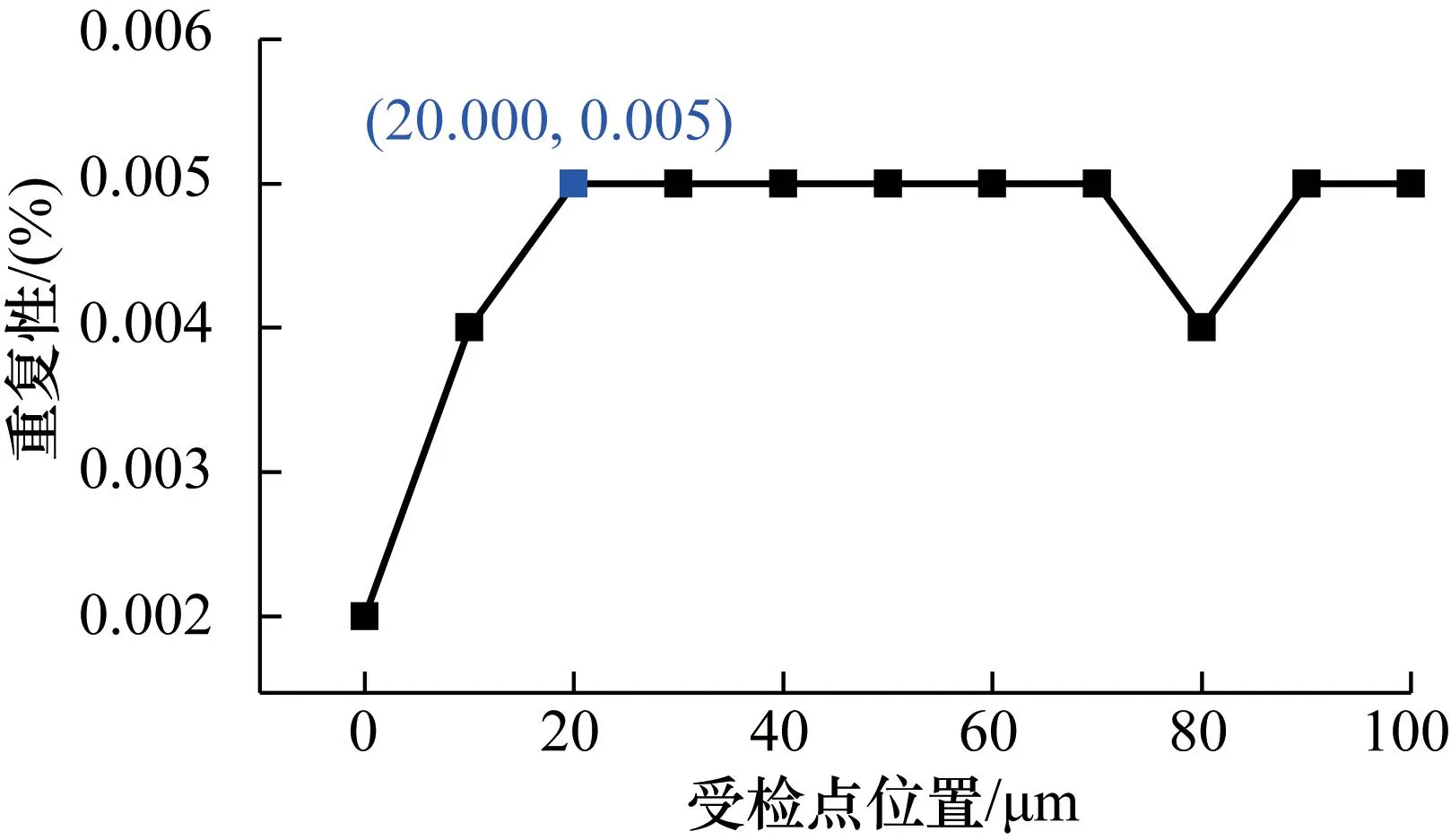
圖8 重復(fù)性校準(zhǔn)曲線Fig.8 Repeatability calibration curve
被測光譜共焦傳感器在100 μm量程內(nèi),重復(fù)性為0.005%,用絕對數(shù)值表示,則重復(fù)性為5 nm。
5 測量不確定度評定
5.1 不確定度來源
不確定度來源包括:被測光譜共焦傳感器的分辨力或重復(fù)性引入的不確定度分量u1(Yij),激光干涉儀波長穩(wěn)定性引起的不確定度分量u2,λ(Sij),激光干涉儀非線性引入的不確定度分量u2,e(Sij),空氣折射率引起的不確定度分量u2,n(Sij),激光干涉儀光軸與精密位移臺(tái)運(yùn)動(dòng)軸線不平行引起的不確定度分量u3,p(Sij),被測光譜共焦傳感器的測量軸線與精密位移臺(tái)運(yùn)動(dòng)軸線不平行引起的標(biāo)準(zhǔn)不確定度分量u3,s(Sij),精密位移臺(tái)角晃動(dòng)引起的不確定度分量u3,a(Sij)及環(huán)境溫度變化引入的不確定度分量u4(Sij)。
5.2 不確定度傳播公式
合成不確定度如式(12)所示:
(12)
不確定分量的傳遞系數(shù)如式(13)、式(14)所示:
(13)
(14)
式中:urel(Yij)為與被測光譜共焦傳感器有關(guān)的不確定度分量;urel(Sij)為與校準(zhǔn)裝置有關(guān)的不確定度分量;YFS=100 μm;c(Yij)=0.01 μm-1;c(Sij)=-0.01 μm-1。
5.3 標(biāo)準(zhǔn)不確定度評定
1) 被測光譜共焦傳感器的分辨力或重復(fù)性引入的不確定度分量u1(Yij)
被測光譜共焦傳感器的測量分辨力為0.1 nm,可視為均勻分布,引入的不確定度分量u1(Yij1)=0.03 nm。
重復(fù)性為5.0 nm,引入的不確定度分量u1(Yij2)=2.9 nm。
該不確定度分量包含了分辨力引入的不確定度分量u1(Yij),因此選擇重復(fù)性引入的不確定度c(Yij)u1(Yij)=0.0029%。
2) 激光干涉儀波長穩(wěn)定性引起的標(biāo)準(zhǔn)不確定度分量u2,λ(Sij)
激光波長相對擴(kuò)展不確定度(B類):Uτ(λ)=2.0×10-8(k=2),波長穩(wěn)定性引入的不確定度分量u2,λ(Sij)=1.0×10-8L,c(Sij)u2,λ(Sij)=0.000 001%。
3) 激光干涉儀非線性引入的標(biāo)準(zhǔn)不確定度分量u2,e(Sij)

4) 空氣折射率引起的標(biāo)準(zhǔn)不確定度分量u2,n(Sij)
空氣折射率引入的相對擴(kuò)展不確定度(B類),U2,n(Sij)=2.0×10-7(k=2),引入的不確定度分量u2,n(Sij)=1.0×10-7L,c(Sij)u2,n(Sij)=0.00001%。
5) 激光干涉儀光軸與精密位移臺(tái)運(yùn)動(dòng)軸線不平行引起的不確定度分量u3,p(Sij)

6) 被測光譜共焦傳感器的測量軸線與位移臺(tái)運(yùn)動(dòng)軸線不平行引起的標(biāo)準(zhǔn)不確定度分量u3,s(Sij)
同理,當(dāng)被測光譜共焦傳感器打在反射板上的光點(diǎn)最大偏移量為0.07 mm時(shí),不確定度分量u3,s(Sij)=0.2 nm,c(Sij)u3,s(Sij)=0.000 6%。
7) 精密位移臺(tái)角晃動(dòng)引起的不確定度分量u3,a(Sij)

8) 環(huán)境溫度變化引入的不確定度分量u4(Sij)

U2=k×uc=7.0 nm。
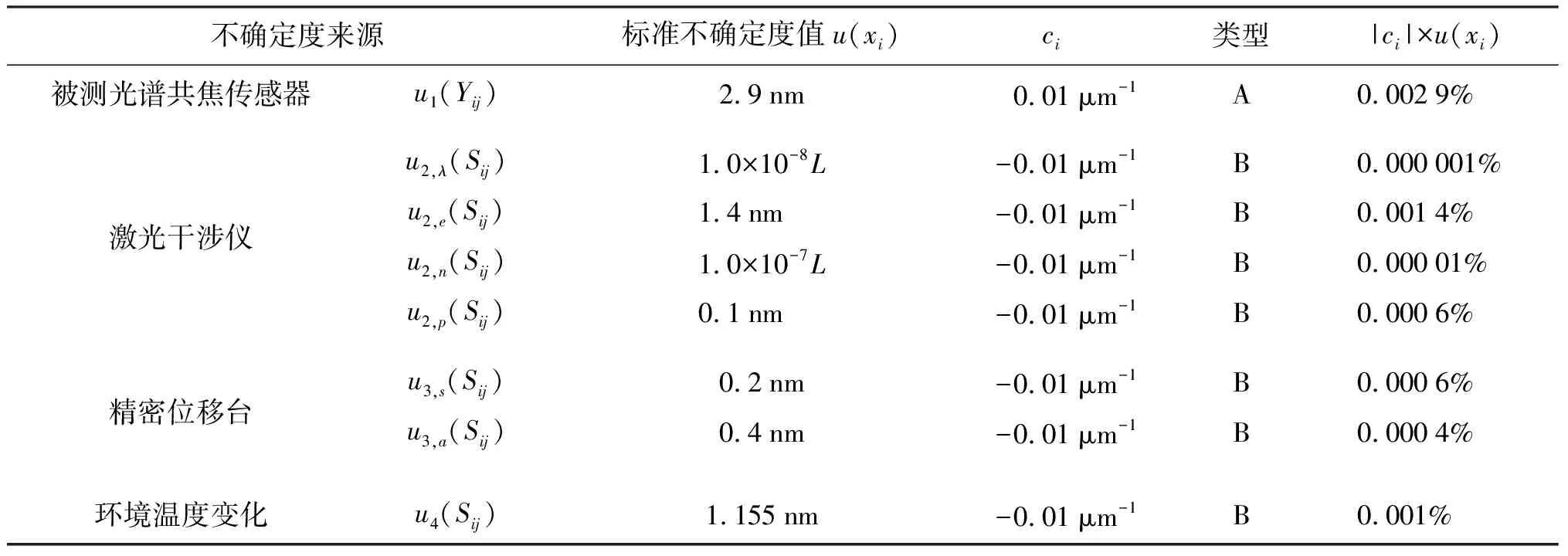
表2 標(biāo)準(zhǔn)不確定度分量分析表Tab.2 Standard uncertainty component analysis table
計(jì)算結(jié)果為u0=1.5 nm+1×10-7L,取包含因子k=2,校準(zhǔn)裝置的擴(kuò)展不確定度
U1=3.0 nm+2×10-7L,
測量結(jié)果的合成標(biāo)準(zhǔn)不確定度
取包含因子k=2,擴(kuò)展不確定度
6 討 論
在校準(zhǔn)過程中發(fā)現(xiàn),換用不同材質(zhì)、粗糙度的測量板,得到的校準(zhǔn)結(jié)果會(huì)存在差異。當(dāng)選擇光學(xué)反射鏡作為反射板時(shí),被測光譜共焦傳感器無有效信號(hào)輸出;當(dāng)采用白色零級陶瓷量塊作為反射板時(shí),其校準(zhǔn)結(jié)果目前來看最佳,而采用零級鋼量塊時(shí)次之,金屬面作為反射板時(shí)最大示值誤差最大。不同反射板的測量結(jié)果如表3所示。
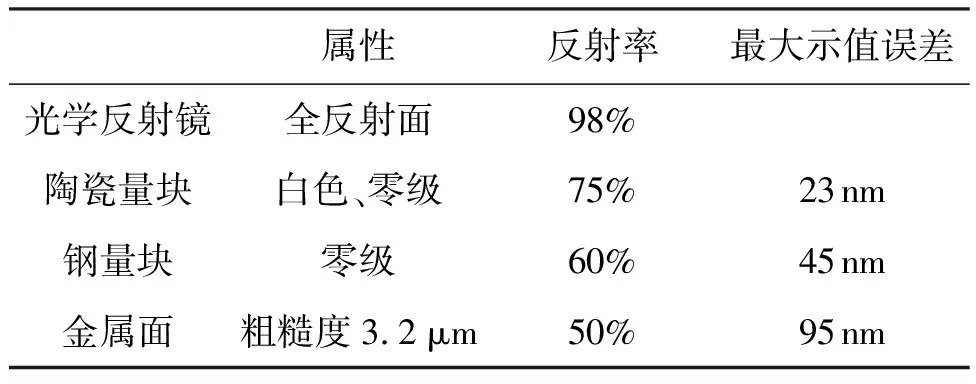
表3 不同反射板對測量的影響Tab.3 The influence of reflection plates of different materials on measurement
7 結(jié)束語
采用激光干涉儀實(shí)現(xiàn)納米級位移測量是目前較為普遍應(yīng)用的技術(shù)方法,但由于激光干涉儀非線性誤差的影響,限制了測量準(zhǔn)確度的提高。本文提出的波長倍數(shù)間隔測量法,可在不改變激光干涉儀技術(shù)性能的條件下,配合精密位移臺(tái),通過改變測量的過程和方式,來減小激光干涉儀非線性對位移測量的影響,進(jìn)而提高位移測量的準(zhǔn)確度,這為很多納米級甚至更高準(zhǔn)確度的位移測量提供了技術(shù)思路。針對納米位移測量往往受限于精密位移臺(tái)等位移發(fā)生部件的精度限制,也提出了測點(diǎn)修正算法來簡化實(shí)際應(yīng)用中的數(shù)據(jù)處理過程,并在理論上分析了算法對偏差的影響規(guī)律,這對簡化分析過程和提高分析效率具有積極意義。采用本文提出的技術(shù)方法和研制的校準(zhǔn)裝置,不僅可解決高準(zhǔn)確度的光譜共焦傳感器的校準(zhǔn)問題,也可為更大量程的納米位移傳感器的校準(zhǔn)、研發(fā)和生產(chǎn)提供技術(shù)支持。
猜你喜歡
小學(xué)科學(xué)(學(xué)生版)(2021年5期)2021-07-22 02:40:06
中學(xué)生數(shù)理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學(xué)生數(shù)理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學(xué)生數(shù)理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數(shù)學(xué)小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
軍事文摘·科學(xué)少年(2017年4期)2017-06-20 23:25:16
軍事文摘·科學(xué)少年(2017年2期)2017-04-26 21:58:43
中學(xué)生數(shù)理化·八年級物理人教版(2016年3期)2016-04-07 04:49:32
少兒科學(xué)周刊·兒童版(2016年1期)2016-03-14 03:52:21
閱讀與作文(小學(xué)低年級版)(2015年4期)2015-04-29 00:00:00
