用于引力波探測的星間激光干涉測量模擬系統
2024-04-19 12:12:38穆衡霖
計量學報 2024年3期
穆衡霖, 李 巖
(清華大學 精密儀器系,北京 100084)
1 引 言
引力波在探索宇宙[1]的起源和演化中發揮著重要作用。受振動和重力梯度的影響,地面引力波干涉儀的敏感頻段在10 Hz以上,而0.1 mHz~1 Hz頻段蘊含著更豐富的宇宙信息的引力波則被淹沒在噪聲中。這些波段的引力波只能通過激光干涉空間天線(laser interferometer space antenna, LISA)、天琴(Tianqin)或者太極(Taiji)等臂長在106km量級的星間激光引力波干涉儀(inter-satellite laser interferometer, ISLI)進行探測[2~6]。
現有的ISLI均采用應答式干涉儀,這與傳統的外差干涉儀有著顯著的不同。探測引力波首先是在衛星1上發射W量級功率的穩頻激光(主激光)傳播106km后抵達衛星2,發散角使得接收的光功率僅在100 pW量級;而后,通過光學鎖相環(optical phase-locked loop, OPLL)將衛星2上從激光的相位(頻率)鎖定到遠處的主激光相位(頻率)上;最后,衛星2上的激光再返回衛星1,兩路光發生外差干涉,通過相位表分析相位變化,進而得到位移信號。
鎖相環技術已經相當成熟,在弱光條件下,部分光學鎖相環甚至能夠達到散粒噪聲極限[7~14]。然而,目前主流的光學鎖相環都是模擬的,一旦失鎖后難以自動鎖定,在集成化和自動化上均不占據優勢。相反,數字光學鎖相環在兼容性、自動化和集成化等方面上具有顯著優勢,更適合應用在ISLI中,見文獻[14]。
綜合以上考量,本實驗搭建了一套精度較高的星間激光干涉模擬系統,使用數字外差鎖相環,成功將從激光器的相位緊密鎖定到了主激光器(已穩頻)的相位上。使用高精度相位表測量外差信號的相位,結果顯示應答式干涉儀在長位移和短位移條件下均無粗大誤差,而環境擾動和光路裝調誤差是主要噪聲(誤差)來源。實驗中,主激光器的功率被衰減到100 pW量級,與ISLI中的弱光在同一數量級,證明了裝置在外太空條件下的可行性。通過調整數字鎖相環的參數改變主從激光的頻率差,賦予了整個裝置更大的靈活性。數字式鎖相環與后續的數字信號處理電路相兼容,結合文獻[13]中提出的自動鎖定程序,可在一定程度上提高裝置的自動化程度。
2 實驗原理
圖1是星間激光干涉測量模擬系統的結構圖。主、從激光器均為Nd:YAG晶體的非平面環形腔激光器。整個實驗系統的光學部分由穩頻的主激光器(master laser),自由運轉的從激光器(slave laser),聲光移頻器(acousto-optic modulator, AOM),光纖和光電探測器(detector)組成。而電學部分則包含相位表(phasemeter),PI控制系統(temperature control and PZT control),高電壓放大器和射頻驅動源(radio frequency, RF)等。裝置的實物圖如圖2所示,主激光器上方的銀白色儀器是執行鎖相環和相位測量功能的關鍵電學儀器Moku: Pro,在實驗中,整個裝置被放置在亞克力罩子里。

圖1 星間激光干涉測量模擬系統的示意圖Fig.1 Structure diagram of inter-satellite laser interferometry simulation system

圖2 主激光器(左)和從激光器(右)的照片Fig.2 Photos of the master laser (left) and slave laser (right)
光從主激光器出射,首先經過光隔離器和半波片后,進入偏振分光棱鏡PBS,其s光(99%)反射而p光(1%)透射。p光用于穩頻,而s光則作為測量光進入聲光移頻系統。
用于測量的s光首先經過普通分光棱鏡BS后分為均等的兩路,而后經過聲光移頻器AOM1和AOM2移頻,兩個移頻器的移頻量分別為f1=80 MHz和f2=82 MHz,用光闌濾去除+1級次之外的其他衍射級次,恰當使用光纖以減少反射鏡,提高光路裝配的靈活性(光纖以虛線表示)。
來自AOM1的光和從激光器經過AOM3的光合光,并被探測器Detector3感知。調節從激光器的溫度,使得主、從激光的頻率差在5~25 MHz內。隨后,通過光學鎖相環,將從激光器的頻率鎖定到主激光器經AOM1移頻后的頻率上。
與主激光器相似,從激光器出射的激光也經過光隔離器和半波片后,進入偏振分光棱鏡PBS,其中s光(約1%)反射而p光透射。s光與來自主激光器經AOM1移頻后的光合光并與用光學鎖相環的搭建,而p光則傳播至主激光器后,與主激光器經AOM2移頻后的光合光,產生外差干涉信號。外差信號被探測器Detector2感知,經相位表后,分析得出其相位變化。在實際應用中,鎖相環位置處產生誤差信號的器件是相位表的一個通道, 而分析Detector2探測到的外差信號的是同一塊相位表的另一個通道。此外,為了將光衰減到星間引力波干涉儀的功率水平,需要使用多個衰減片。圖1中未對此做出明確描繪。
2.1 鎖相環的搭建
探測器將主、從激光的外差信號轉化為電信號,原始的交流外差電信號表達式為
(1)
(2)
式中:uACM(t)和uACS(t)分別表示主衛星和從衛星處的外差信號;RF=5 kΩ為光電探測器的反饋電阻;而R(λ0)=0.6 A/W是探測器的響應度;PM2和PS2分別表示主、從衛星上的本地強光功率;而PM1和PS1則表示弱光功率;fh=νM-νS是外差頻率;φhm(t)=φm2(t)-φs1(t)和φhs(t)=φm1(t)-φs2(t)分別表示主、從衛星位置處的環外相位信息,忽略其他一切噪聲和回路延遲時,兩者是相等的。
原始的模擬電信號經前置低噪聲放大器后,進入模數轉換器并被數字化,隨即輸入相位表。相位表依賴于其內部的子鎖相環工作,其詳細工作原理見參考文獻[15]。相位表給出輸入外差信號和標準余弦信號(產生于數控振蕩器)的相位差,并輸出與此相位差成正比的電壓信號(比例系數kI),再經過數字濾波器F(s)后,進入比例-積分反饋電路。控制器電路分為快伺服回路(控制壓電陶瓷)和慢伺服回路(控制溫度),壓電陶瓷和溫度的響應函數分別為P(s)和T(s),而控制器的傳遞函數則分別為CP(s)和CP(s)·CT(s)。經快慢兩個回路后,最終從激光的頻率與主激光的頻率相差嚴格的fh,也就是從激光相位緊密鎖定到主激光相位上。光學鎖相環的傳遞函數如圖3所示。
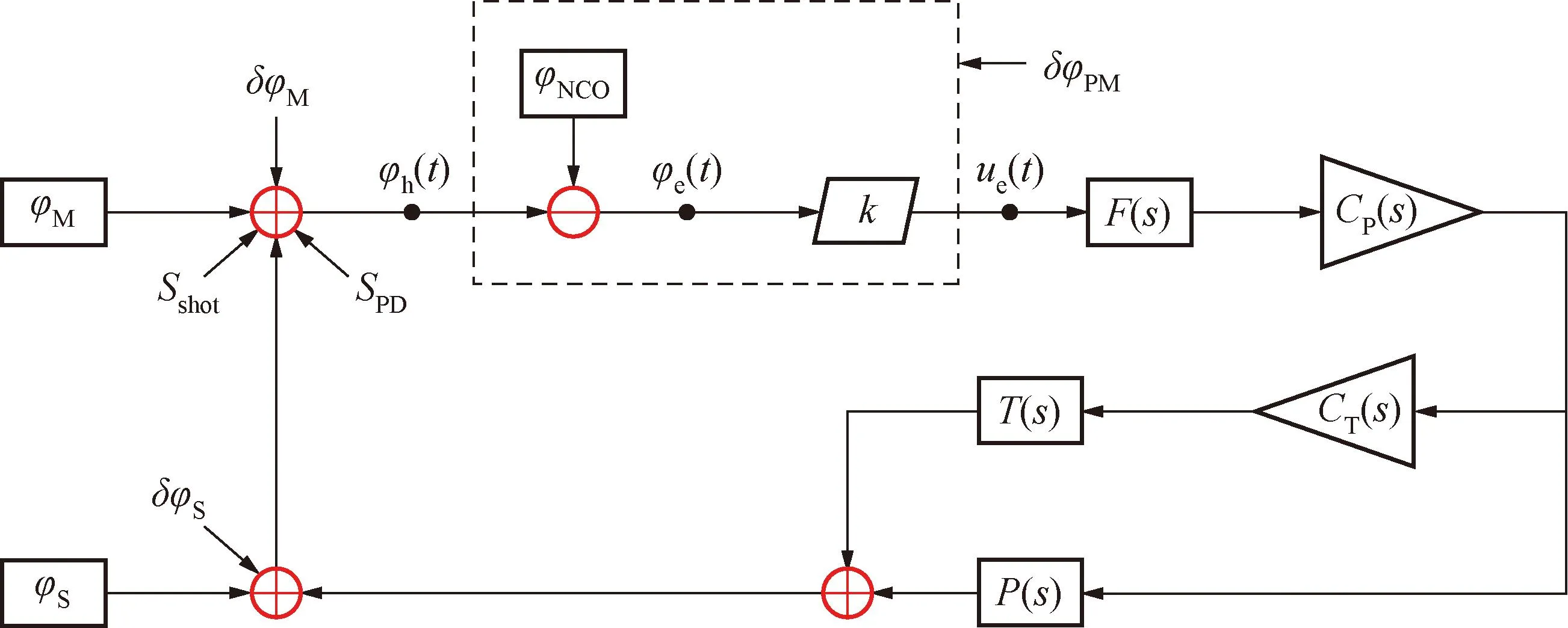
圖3 光學鎖相環的傳遞函數圖Fig.3 Block diagram and the main noise sources of the OPLL
圖3中,Sshot是散粒噪聲,δφM是主激光相位噪聲,δφS是從激光相位噪聲,δφPM是相位表的相位噪聲,SPD是探測器噪聲。
經多次優化,數字式光學鎖相環的傳遞函數分別為
(3)
(4)
(5)
而兩個執行器件溫度和壓電陶瓷的傳遞函數則分別為
(6)
(7)
經分析,系統不存在s域右半平面的極點,因此整個系統具有穩定性。此外,盡管從公式(4)和公式(5)上看CP和CT在零頻率處的響應是無窮大,但受限于儀器本身,這種響應必然是有限度的,這使得整個裝置具有足夠的相位裕度。
2.2 位移測量原理
當鎖定完成時,如果主、從衛星發生相對運動(即位移臺運動)時,設相對位移為ρ(t),根據多普勒效應,主衛星處探測器得到的外差信號相位將發生變化,進而可求得位移信號。理論上,忽略一切光程噪聲,在Detector2處外差信號的相位為
(8)
式中:p(t)是主激光器的相位噪聲;τrt是光的來回傳播時間。
將解調頻率選擇為fh,則公式(8)中的第一項可被消去,那么理論上造成相位變化的就是位移和激光頻率噪聲。
激光頻率噪聲而引入的長度噪聲為
(9)
式中:Sfrequency(f)是主激光的頻率噪聲;Sx(f)是長度噪聲。
地面模擬裝置體積較小(單次光程不足 30 cm),因此所帶來的光傳播時間極小,公式(9)即可近似為
(10)
當使用超穩激光器時,激光的頻率噪聲將不再是本實驗中的主要噪聲來源,這一點會在第3節中詳細敘述。
根據公式(8)~公式(10),考慮到本實驗中“主衛星”固定,那么“從衛星”的位移信號與主激光器相位信號的換算關系為
(11)
公式(11)與正常的外差干涉長度測量系統的結果是完全一致的,因此可以認為,從衛星或者說從激光器起到了“反射鏡”的作用。
3 誤差(噪聲)測量
3.1 基本測試
在正式實驗進行之前,首先測量主激光器的頻率噪聲。將主激光器與中國計量科學院(NIM)的超穩光頻標激光器合光后,使用頻率計測量拍頻信號的頻率,門時間設定為0.1 s,對信號做譜密度計算后,主激光器的頻率噪聲結果如圖4所示。
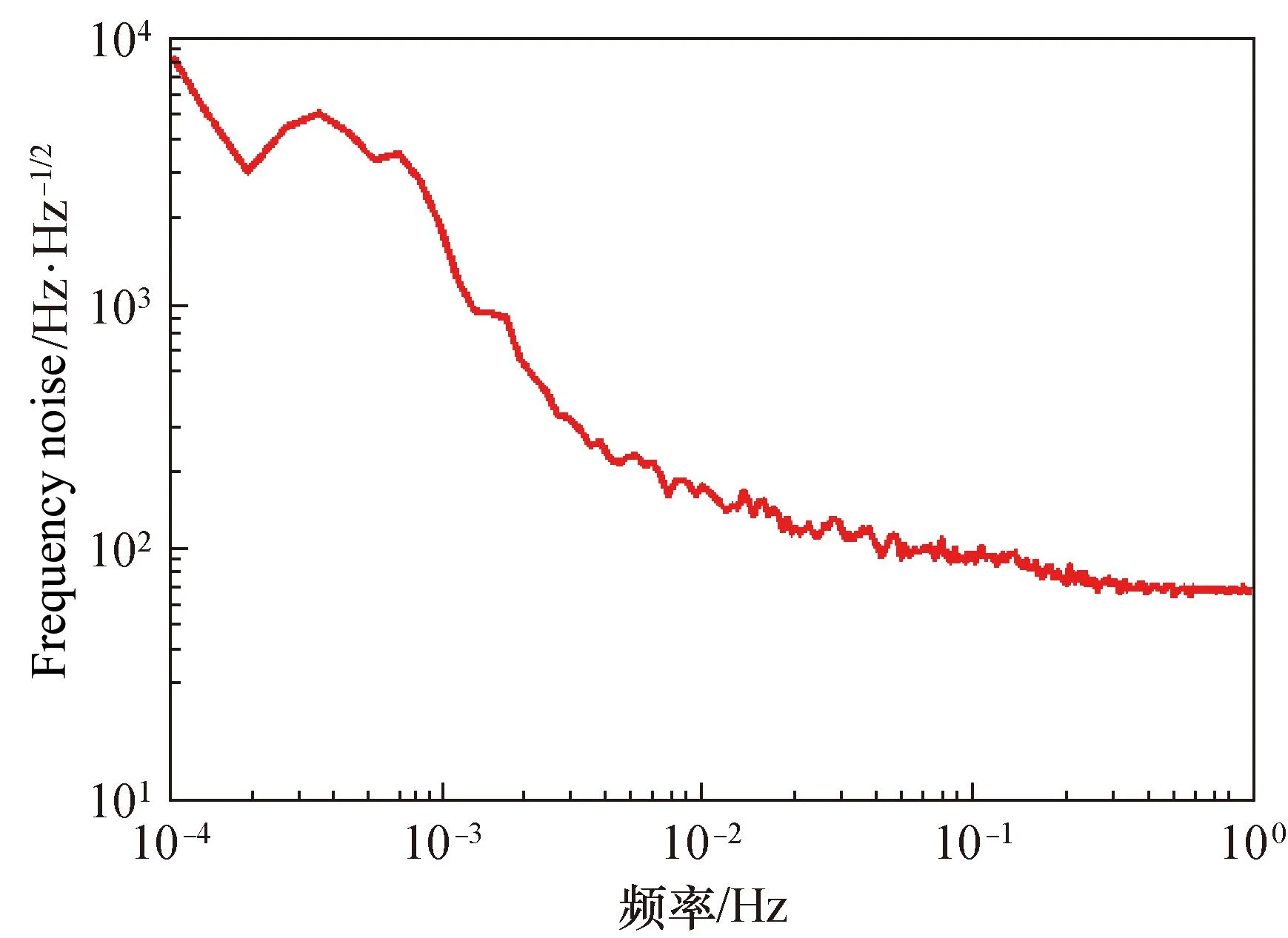
圖4 主激光器的頻率噪聲Fig.4 The frequency noise of the master laser
根據圖4,主激光器的頻率噪聲在10 mHz以下頻段出現顯著抬升,具有較為典型的1/f線型,根據參考文獻[16],自由運轉的非平面環形腔激光器的頻率噪聲可以建模為
(12)
穩頻過程將激光的頻率噪聲壓縮了約4個數量級。
相位表是產生誤差信號的器件,其鑒相噪聲基底決定了系統的相位噪聲基底。將標準銣鐘的信號分成2路,分別接入相位表的兩個輸入接口內(相位表可同時測量兩路信號),理論上講,兩路信號完全相同,這時相位表輸出兩路信號的差值就可作為相位表的噪聲基底。經測量,差值相位信號的振幅譜密度函數(amplitude spectral density, ASD)如圖5所示。

圖5 相位表的噪聲基底(幅度譜密度)Fig.5 Noise floor of the phasemeter
3.2 零漂測試
首先,固定所有光學元件,讀取detector3上外差信號的零漂。在這里,弱光功率在100 pW量級,而強光功率約0.5 mW。測量約6 h的零漂數據并對時域信號做譜密度分析,得到長時間零漂測試結果如圖6所示。

圖6 長時間零漂測試Fig.6 Zero drift during a very long time
在圖6中可以看到,隨著時間的推移,零漂出現顯著變化,總共漂移了約17 rad。考慮到實驗時間約為11:00~17:00,可以認為這種變化主要來自于環境溫度和氣壓帶來的折射率變化,未來將裝置置于真空中,能有效抑制零漂。
從長時間零漂的結果看,整個頻譜圖具有典型的1/f線型。在較高頻段(0.03~1 Hz),零漂的譜密度低于0.06 rad/Hz1/2,換算到長度小于10 nm/Hz1/2,可以認為具有較低的噪聲水平。但是,在更低的頻段,例如0.1 mHz附近,譜密度超過40 rad/Hz1/2,因環境緩慢變化帶來的低頻段的漂移十分顯著。因此,本裝置的有效頻段主要位于高頻段,也就是0.03~1 Hz,尤其是0.1~1 Hz。
從頻段上看,ISLI重點關注0.1 mHz~1 Hz頻段,本實驗中的鎖定時間能超過2×104s,且直到采集數據結束時仍無失鎖跡象,因此具有探測該頻段的基本能力。可根據此地面模擬干涉儀的一系列表現來研究諸如“太極”計劃(敏感頻段恰好也為0.1 mHz~1 Hz)等天基引力波干涉儀的噪聲,見文獻[6]。
同時,根據公式(10),激光頻率噪聲帶來的鑒相噪聲為
Sφ(f)=πτrtSfrequency(f)
(13)
因此,即便是在頻率噪聲最大的低頻段,激光的頻率噪聲對零漂的影響也不足2×10-4rad/Hz1/2,顯然不是零漂的關鍵影響因素。然而,在實際的星間激光干涉中,對于百萬公里量級的不等臂長,激光頻率噪聲的影響將是顯著的,見文獻[16]。
3.3 長位移測試
為測試干涉儀的表現,在鎖定完成后,驅動位移臺,觀察相位表示數。在這里,弱光信號被設定為200 pW以下,強光信號則根據情況而調整。在較長時間內,令位移臺以固定速度0.25 mm/s做往復運動(調轉方向的時間已考慮在內),單次運動的行程為100 mm,其結果如圖7所示。

圖7 長位移下的干涉儀表現Fig.7 Interferometer performance under long displacement condition
在約1×104s的時間內,鎖相環工作狀態良好,未出現失鎖現象,見圖7(b)。但將圖片放大后可以看到,干涉儀的讀數并非是一條理想的直線,見圖7(a),這既有可能是長距離下位移臺的“爬行”現象,也可能是干涉儀本身存在的誤差。經測量,在100 mm的行程上,干涉儀讀數的相對誤差約為0.5‰,考慮到干涉儀是在大氣環境中工作的,空氣折射率和裝配調整過程中的誤差都可能造成誤差,可以認為干涉儀工作不存在粗大誤差。
3.4 短位移測試
換用精密納米位移臺,在較短位移下測試應答式干涉儀的工作狀態。驅動位移臺使之做階梯運動,其結果如圖8所示所示。位移過程持續了約325 s,精密位移臺的步距為1 μm,位移臺總共移動了25 μm,等效為幾何路程變化50 μm。受振動影響,相位存在輕微波動。

圖8 短位移下的干涉儀表現Fig.8 Interferometer performance under short displacement condition
在移動中,相位表讀數改變了約46.895個周期,絕對誤差約-80.74 nm,相對誤差約為-1.6‰,精密位移臺的分辨率為2 nm,兩者相對比,明顯測量存在系統誤差。分析其原因如下:
1) 長距離位移臺的可移動距離遠長于短距離位移臺,在光路裝調過程中,反復令長距離位移臺做滿量程運動,最終能夠使得光傳播方向基本平行于位移臺運動方向,最大限度減少了光路裝調帶來的誤差;
2) 短距離位移臺滿量程運動距離僅100 μm,肉眼幾乎不能分辨,粗調帶來較大的光路不平行;
3) 實驗中先完成了長距離位移臺的測試,而后更換了短距離位移臺,長距離位移臺底板較低,對振動的抗性強,而短距離位移臺底板較高,還需要加上轉接板,因此振動影響較大。
盡管具有較大的系統誤差,然而在短距離狀態下,干涉儀的讀數具有明顯的階梯型,顯然能夠正常運行。這也間接驗證了應答式干涉儀的有效性。
4 結 論
開發了一套用于低頻引力波探測的星間激光干涉測量模擬系統。通過光學鎖相環將從激光器的相位鎖定到功率僅在100 pW量級的穩定的主激光器的相位上,通過讀取主激光器位置處外差信號的相位信息判斷主、從衛星的相對位移。零漂測試顯示環境溫度、氣壓等帶來的折射率變化和振動是噪聲的主要來源,主激光器的頻率噪聲對裝置表現影響較小。短位移測試和長位移測試均證明裝置不存在粗大誤差,但仍具有較顯著的系統誤差,這可能來自于光路裝調的不理想。后續工作將主要聚焦于環境的優化,例如將裝置置于溫控良好的真空腔中,并輔以主動隔振系統。實驗結果證明該模擬系統能夠應用于后續星間激光干涉噪聲模型標定任務。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中國生殖健康(2019年3期)2019-02-01 06:12:26
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
海軍航空大學學報(2015年3期)2015-11-11 17:20:00
