基于觀測器的半主動懸架天棚控制設(shè)計(jì)與實(shí)現(xiàn)
2013-10-14 11:00:18李彤姚嘉凌王明海李林姍鐘景輝
機(jī)械制造與自動化 2013年3期
關(guān)鍵詞:系統(tǒng)
李彤,姚嘉凌,王明海,李林姍,鐘景輝
(南京林業(yè)大學(xué)汽車與交通工程學(xué)院,南京 210037)
0 引言
車輛懸架系統(tǒng)性能的優(yōu)劣直接影響車輛的乘坐舒適性和操縱安全性。傳統(tǒng)的被動懸架由于其參數(shù)固定從根本上造成了兩者的矛盾,主動懸架雖有較大的響應(yīng)范圍,能取得好的減振效果,但成本高、結(jié)構(gòu)復(fù)雜及能耗大而難以推廣使用。半主動懸架其減振器的阻尼系數(shù)在一定范圍內(nèi)可以調(diào)節(jié)或者其承載彈簧的剛度是可以改變的,半主動懸架的性能可達(dá)到或接近主動懸架的性能[1]。
天棚阻尼控制是半主動懸架的經(jīng)典算法[2],使用可靠,其需要采集車身的絕對速度及車身與輪胎之間的相對速度,但從目前的技術(shù)水平來看,通過直接測量來獲得某些狀態(tài)觀測量(如車身的絕對速度)是相當(dāng)困難的。克服這種困難的途徑之一是重構(gòu)系統(tǒng)的狀態(tài),并用這個重構(gòu)的狀態(tài)來代替系統(tǒng)的真實(shí)狀態(tài)來實(shí)現(xiàn)所需的狀態(tài)反饋[3-4]。
運(yùn)用Kalman濾波器進(jìn)行狀態(tài)估計(jì),減少實(shí)際測量的成本逐漸引起了學(xué)者們的廣泛關(guān)注[5]。雖然Kalman濾波器對速度的估計(jì)比較準(zhǔn)確,但是在實(shí)際使用中,由于受到系統(tǒng)非線性,參數(shù)變化,以及干擾等因素,狀態(tài)觀測器不一定能保證全局漸近穩(wěn)定性、收斂性。因此,在Kalman濾波器的設(shè)計(jì)的基礎(chǔ)上,設(shè)計(jì)了滑模觀測器,克服了一般狀態(tài)觀測器的缺點(diǎn),保證了系統(tǒng)全局漸進(jìn)穩(wěn)定性,并對兩個觀測器的效果進(jìn)行了對比。
1 汽車半主動懸架系統(tǒng)的模型研究
相對于被動懸架,半主動懸架增加了減振器可控力fd,兩自由度模型如圖1所示。運(yùn)動微分方程為:

式中:ms—簧載質(zhì)量;
mu—非簧載質(zhì)量;
ks—懸架彈簧剛度;
kt—輪胎的剛度;
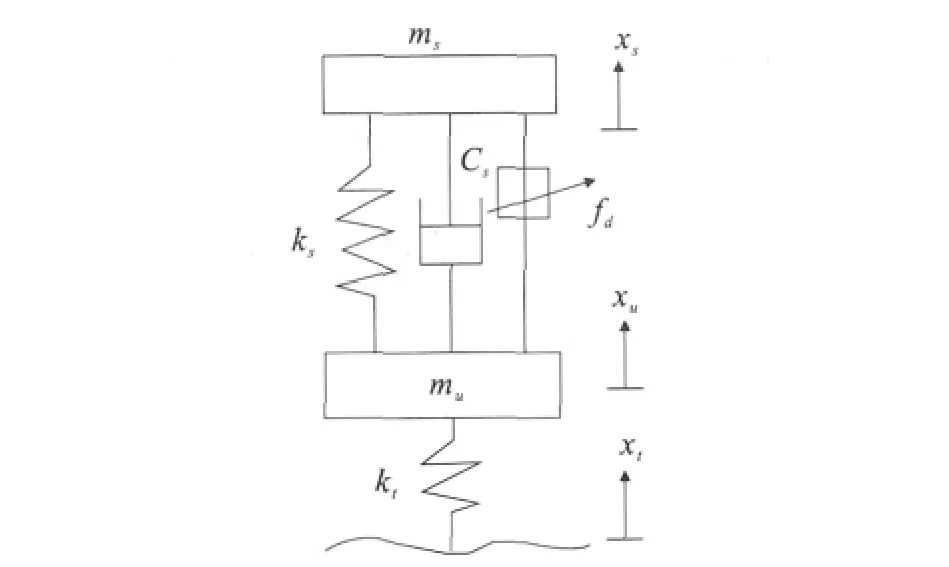
圖1 半主動懸架1/4模型
cs—懸架機(jī)械阻尼;
fd—可控制阻尼力;
xt—地面隨機(jī)激勵位移;
xs—簧載質(zhì)量位移;
xu非簧載質(zhì)量位移。選取狀態(tài)變量:

系統(tǒng)的空間狀態(tài)方程:
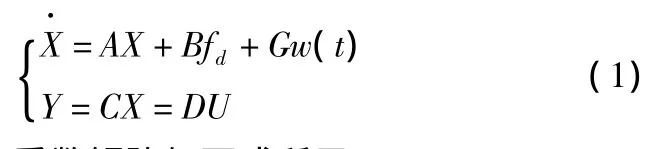
其中,方程中的各系數(shù)矩陣如下式所示:
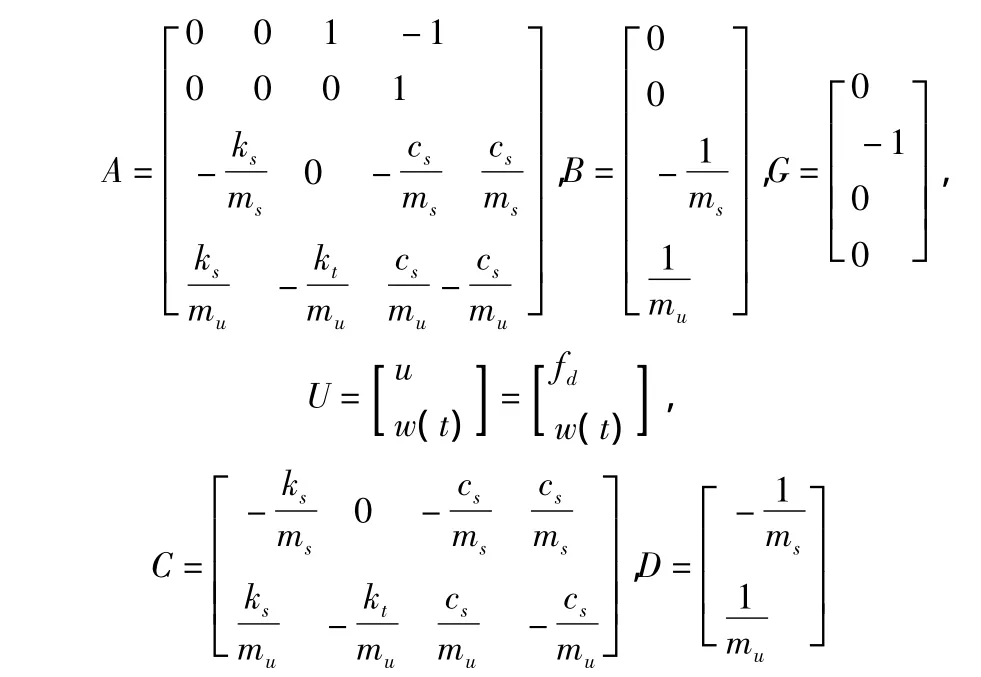
u為減振器的控制力,即fd。
2 狀態(tài)觀測器的設(shè)計(jì)與仿真
2.1 Kalman濾波器的設(shè)計(jì)
系統(tǒng)的Kalman濾波器就是最優(yōu)觀測器。利用Kalman濾波器對系統(tǒng)進(jìn)行最優(yōu)控制是非常有效的。車輛在道路上行駛,路面的擾動可以看作是濾波白噪聲,則可以將路面擾動看作為系統(tǒng)模型噪聲,而用傳感器測量加速度信號,或多或少的會有一些干擾,這些干擾可以看作是量測噪聲。采用Kalman濾波算法求解觀測器的增益 ,從而通過觀測器進(jìn)行狀態(tài)估計(jì)(觀測器原理如圖2所示),比采用極點(diǎn)配置方法進(jìn)行狀態(tài)估計(jì)更為合適。

圖2 狀態(tài)觀測器原理圖

這里假定w(t),v(t)分別為零均值的一維隨機(jī)噪聲干擾輸入和2維隨機(jī)白噪聲過程。w(t)與v(t)兩噪聲過程均平穩(wěn)且互不相關(guān)。

其中:d(t)=Gw(t)-Lv(t)
通過計(jì)算可知系統(tǒng)是完全可觀測的。所以系統(tǒng)的最優(yōu)估計(jì)器為:

式中L=PoCTRo
其中Po為以下Riccati方程的解:

可以證明,Riccati方程的解Po就是估計(jì)誤差的協(xié)方差,而此協(xié)方差的跡(trPo)即為誤差方差。
2.2 滑模觀測器的設(shè)計(jì)
在實(shí)際使用中,由于受到系統(tǒng)非線性,參數(shù)變化,以及干擾等因素,狀態(tài)觀測器不能保證全局漸近穩(wěn)定、收斂性和魯棒性。因此本文在Kalman濾波器的基礎(chǔ)上加入滑模sgn開關(guān)量Ko(y- ),設(shè)計(jì)滑模觀測器,保持系統(tǒng)全局漸近穩(wěn)定性[6]。滑模觀測器狀態(tài)方程:

本文用圓判斷的方法[7-9],選取Ko= ρG,ρ≥0.此外為了避免抖振,用飽和函數(shù)代替開關(guān)函數(shù):xp=Ko.sat
φ為誤差界限寬度。當(dāng)觀測器的誤差超出這個邊界寬度時,滑模開關(guān)量將變得不連續(xù)。
3 基于觀測器的天棚控制仿真驗(yàn)證
3.1 天棚阻尼控制算法
3.2 基于觀測器的天棚控制仿真驗(yàn)證
以Matlab/Simulink作為仿真語言平臺,對基于Kalman濾波觀測器的天棚控制進(jìn)行仿真計(jì)算,(圖3)被動懸架為比較對象,道路為B級路面,車速為60 km/h,采樣時間為t=0.01 s,ms=160 kg,mu=20 kg,ks=10 000 N/m,kt=100 000 N/m,cs=200 N·s/m,csh=2 500 N·s/m,cp=1 000 N·s/m(被動懸架)。
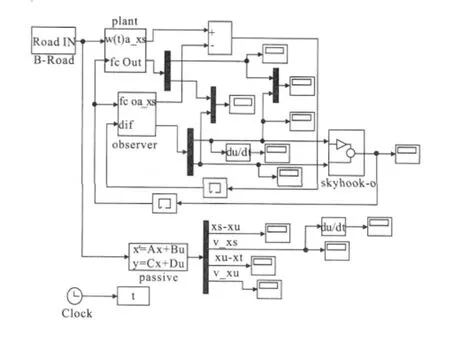
圖3 基于觀測器的半主動懸架仿真模型
滑模觀測器和Kalman濾波器的懸架絕對速度和相對速度估計(jì)值以及真實(shí)值3者之間比較結(jié)果如圖4所示。
由圖4可以看出:滑模觀測器對絕對速度和相對速度的觀測效果比Kalman濾波器的觀測效果要好,估計(jì)值比較接近理想值。

圖4 基于滑模觀測器和Kalman濾波器的懸架絕對速度、相對速度估計(jì)值對比圖
基于滑模觀測器、Kalman濾波器的天棚控制以及被動懸架懸架的加速度、懸架動撓度以及輪胎動載荷對比如圖5所示。
由圖5可以看出,基于滑模觀測器的天棚控制和基于Kalman濾波器的天棚控制衰減了車身振動的加速度,降低了懸架的相對位移,但是輪胎的動載荷卻比被動懸架稍有增大,基于滑模觀測的天棚控制的控制效果略好與基于Kalman濾波器的天棚控制。
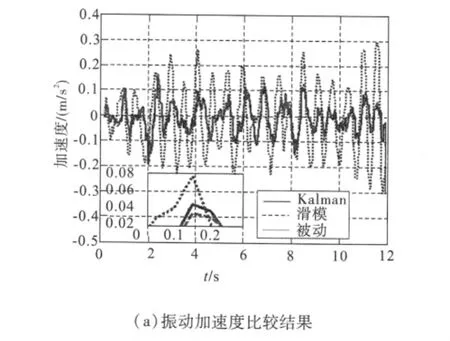

圖5 車身加速度、懸架動擾度及輪胎動載荷比較結(jié)果
4 結(jié)論
本文設(shè)計(jì)了濾波器重構(gòu)系統(tǒng)的狀態(tài),并用這個重構(gòu)的狀態(tài)來代替系統(tǒng)的真實(shí)狀態(tài)來實(shí)現(xiàn)所需的狀態(tài)反饋,探討了基于Kalman濾波器以及滑模觀測器的天棚控制算法,從仿真結(jié)果上可以看出Kalman濾波器以及滑模觀測器可以較為精確的對系統(tǒng)進(jìn)行狀態(tài)估計(jì)。此外,還可以得出,相比于Kalman濾波器,滑模濾波器能更好地克服一般狀態(tài)觀測器受到的非線性、參數(shù)變化以及干擾等因素的影響,在懸架絕對速度、相對速度的觀測上都比Kalman濾波器更加接近實(shí)際值。基于觀測器的“天棚”阻尼控制方法較被動懸架的振動加速度明顯減弱,說明天棚阻尼控制可以提高汽車的平順性,它為進(jìn)一步的實(shí)車試驗(yàn)研究打下了基礎(chǔ)。
[1]姚嘉凌,蔡偉義,陳寧.汽車半主動懸架系統(tǒng)發(fā)展?fàn)顩r[J].汽車工程,2006,28(3):276 ~280.
[2]D.Karnopp,M.Crosby,and R.Harwood,Vibration Control UsingSemi-Active Force Generators,Transaction of the ASME Journal ofEngineering for Industry,vol.96,pp.619 ~626,1974.
[3]Hsu Ling-Yuan,Chen Tsung-Lin.Vehicle Full-State Estimation and Prediction System Using State Observers[J].IEEE TRANSACTIONS ON VEHICULAR TECHNOLOGY,JUL 2009,58(6):2651-2662.
[4]Hsu Ling-Yuan,Chen Tsung-Lin.Estimating Road Angles With the Knowledge of the Vehicle Yaw Angle[J].JOURNAL OF DYNAMIC SYSTEMS MEASUREMENT AND CONTROL-TRANSACTIONS OF THE ASME,MAY 2010,132(3).
[5]Sharma K Crolla,D.A.D.A.Wilson.The design of a fully active suspension systemincorporating a Kalman filter for state estimation[P].No.389.IEEE Control'94,Conference Publication,344~349.
[6]Raghavan,S.and J.K.Hedrick,J.K.,Observer design for a class of nonlinear systems. International Journal of Control,1994,59,515~528.
[7]Misawa,E.A.and Hedrick,J.K.,Nonlinear observers-a state of the survey[J].AMSE Journal of Dynamic Systems Measurement and Control,1989,111:344 ~352.
[8]R.K.DIXIT and G.D.BUCKNER.Sliding mode observation and control for semiactive vehicle suspensions[J].Taylor& Francis./Vehicle System Dynamics,2005,43(2):83 ~105.
[9]Henry,R.R.and Zeid,A.A.,A nonlinear sub-optimal.observerbased control for semiactive suspension[J].Transactions of the ASME ,Transportation Systems,Dynamic Systems and Control Division,1992,44:181~189.
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
制造技術(shù)與機(jī)床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
知識經(jīng)濟(jì)·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(shù)(2016年6期)2016-04-20 06:21:32