關于動態(tài)測量誤差修正方法的對比分析?
2024-04-15 09:24:56毛廷鎏趙建印吳一喬
艦船電子工程 2024年1期
毛廷鎏 趙建印 耿 東 吳一喬 雷 瑤
(海軍航空大學 煙臺 264001)
1 引言
在產品的測試過程中,有靜態(tài)測試和動態(tài)測試兩種方式,由于兩種測試方式側重的測試數據不同,導致產生的誤差也具備不同的特點,因此在測量誤差分析上所釆用的方法也有很大區(qū)別。從目前我國誤差修正方法的研究來看,普遍適用于靜態(tài)測量誤差分析,比如最小二乘法[1~2]、分段直線擬合法[3~4]等等,這些方法理論已經非常成熟,應用也比較廣泛,在處理靜態(tài)測量誤差上,具有較好的效果,但對于具有動態(tài)特點的測量誤差,其效果往往不夠理想。因此對于動態(tài)測量誤差的分析,需要進一步改進誤差修正方法。針對這一問題,當前已經有了一些研究成果[5~7],但還有許多的研究空間。例如將貝葉斯[8~9]、灰色模型[10~11]以及卡爾曼濾波方法[12~13]等具有預測和學習的方法運用到誤差修正上,彌補傳統誤差修正方法不適用于動態(tài)誤差修正的缺點,結合某型航空發(fā)動機的動態(tài)測試數據誤差修正,分析幾種方法的優(yōu)缺點,為選擇合理的動態(tài)測量數據誤差修正模型提供思路。
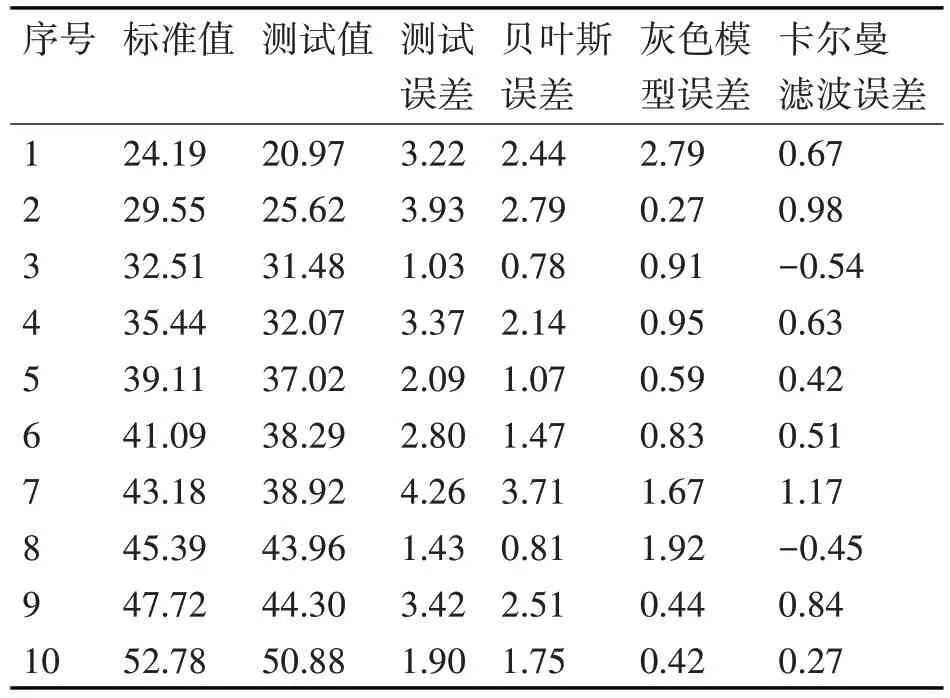
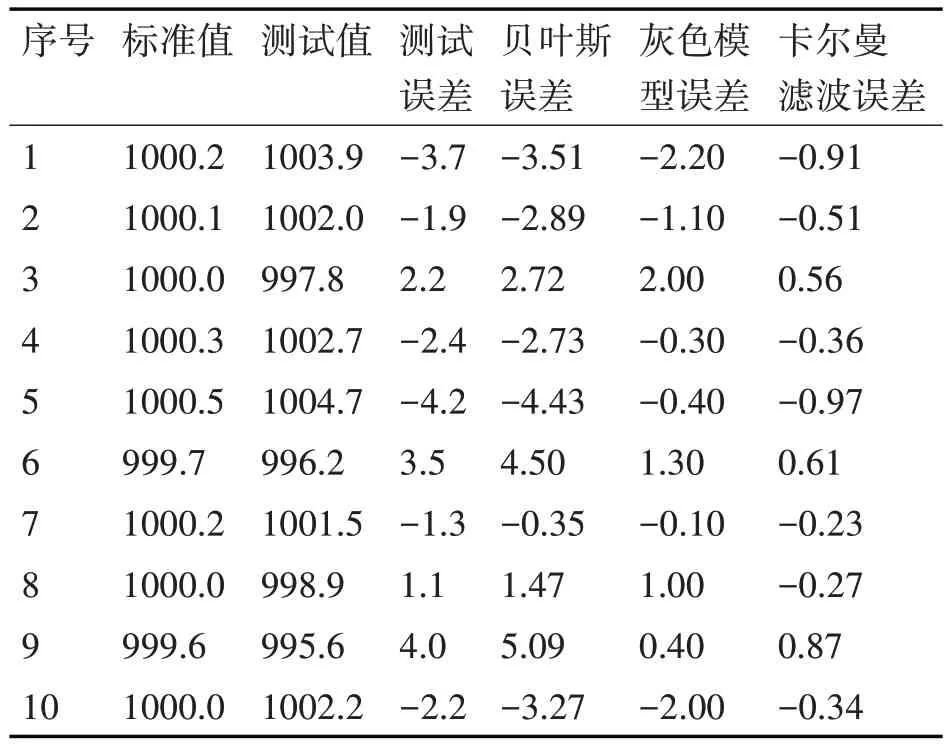
在某型航空發(fā)動機的性能參數測試中,很大一部分參數都具有隨時間動態(tài)變化的特點,從中選取兩個參數,一個是具有線性變化特點的參數,一個是具有非穩(wěn)定性變化特點的參數。同時從測試數據中分別截取兩個參數的10 組時間序列數據,并與標準值進行比較,得到誤差數據如表1、表2 所示。

表1 參數1測試誤差數據

表2 參數2測試誤差數據
2 基于貝葉斯模型的動態(tài)誤差修正方法
貝葉斯預測修正模型的建立是利用客觀信息和主觀信息相結合的方法,具有較好的適用性,可以對復雜的變化規(guī)律進行描述,也可以對發(fā)生的異常情況進行處理[9,14]。
針對某型航空發(fā)動機動態(tài)測試誤差數據,設yt為參數的測試值,θt為模型的隨機狀態(tài)變量,反映參數的誤差趨勢,F′t、Gt為模型函數,建立觀測方程(反映測試值在隨機狀態(tài)變量下的趨勢)和狀態(tài)方程(反映所取狀態(tài)變量的隨機變動)如下:
為了更好描述發(fā)動機動態(tài)測量中數據誤差的多種規(guī)律,利用線性疊加方法將貝葉斯三種基本模型(趨勢模型、季節(jié)模型、回歸模型)融合建立貝葉斯混合模型[15],基本形式如下:
設混合模型的狀態(tài)向量為θit,i=1,2,3,代入式(1)、式(2),則有:
設D0為包含過去時間序列信息的原始數據樣本,則各模型的先驗信息分布如式(7)所示,總模型的先驗分布表示為式(8)和(9)。
取t時刻的狀態(tài)向量為θt,設p=(θt|Dt-1) 為參數的先驗分布模型,p=(θt|Dt)為后驗分布模型,t時刻之前所有的有效信息為Dt,記為
針對發(fā)動機參數動態(tài)測試得到的原始信號進行誤差分離,得到n個動態(tài)誤差序列:
根據動態(tài)誤差序列和發(fā)動機參數的動態(tài)特點,建立發(fā)動機測試數據誤差的貝葉斯動態(tài)模型,其分布如下:
得到其第t+r項前的分布為
當t=n時,通過r步向前預測,就可以得到t+r時刻的參數動態(tài)預報值yt+r,由此可以實現發(fā)動機參數動態(tài)測量誤差的實時修正。
3 基于灰色模型的動態(tài)誤差修正方法
灰色模型本身就包含了一般線性回歸和幕函數的相關內容,使得模型的趨勢性比較強,且具有較快的建模速度和計算速度[16~17]。
基于灰色模型解決某型航空發(fā)動機動態(tài)測量中的誤差問題時,可以采用GM(1 ,1) 模型。其中G表示Grey(灰色),M表示Mode(模型),GM(1 ,1)表示1階的、1個變量的灰色模型[18]。
設測得發(fā)動機參數的原始序列為
設X(1)為X(0)的一次累加序列:
即:
利用X()1計算GM( )1,1 模型中的參數a、u。令:。
式中:,則有:
由此獲得GM(1 ,1) 模型如下:
采用相對誤差檢驗法和后驗差檢驗法這兩種方法對模型的精度進行檢驗[19]。
1)相對誤差檢驗方法
設殘差序列為
相對誤差序列為
通過殘差的大小來判斷模型的好壞。殘差大,說明精度低;殘差小,說明精度高。對于k≤n,稱為k點模擬相對誤差,稱為平均相對誤差。給定α,當<α且Δk<α成立時,稱模型為殘差合格模型。精度等級參照表3。
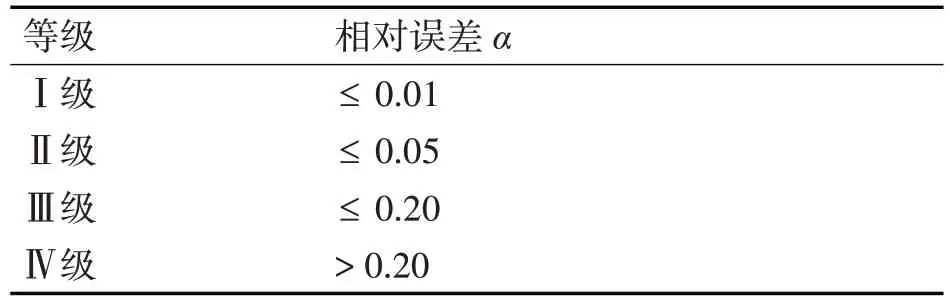
表3 相對誤差精度檢驗對照表
2)后驗差檢驗方法
要確定所建立的模型是否合格,必須用后驗差檢驗[20]。設X(0)為原始序列,(0)為相應的模擬序列,ε(0)為X(0)與(0)的殘差序列,則求得X(0)的均值和方差如式(24)所示。殘差的均值和方差如式(25)所示。
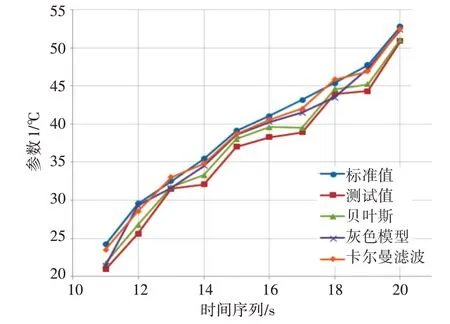
C=S2/S1稱為均方差的比值,假如給定的C0>0 并且當C 式(26)為模型的小誤差概率精度,假如給定的p0>0,并且當p>p0時,認為模型誤差較小。具體分級見表4。 表4 小誤差概率和方差比精度檢驗對照表 經過檢驗后,獲得預測值如下: 以上得到的預測值即為經過誤差修正的各時間序列點的發(fā)動機參數預測值。 卡爾曼濾波通過對先驗估計以及新的變量輸入進行不斷的迭代和遞歸,從而更新狀態(tài)變量的估計,下步計算中將其作為先驗估計,所以僅需存儲前一步的先驗狀態(tài)估計數據[21~22],這種特性使卡爾曼濾波在非線性系統隨機誤差的預估修正中具有很好的效果。 針對發(fā)動機動態(tài)測量數據誤差,設狀態(tài)變量xt是一組可以描述所測參數動態(tài)變化的最小數組,ut為測量系統的實際輸入值,wt為預估噪聲模型參數,一般為常量,yt為量測值;′t為狀態(tài)先驗估計值,′t為觀測先驗估計值,t為狀態(tài)后驗估計值。 確定系統的初始狀態(tài)后,參數下一時刻的狀態(tài)預測值可根據狀態(tài)轉移方程得到,yt預估值由狀態(tài)預測值經過觀測方程處理后得到;式(28)(狀態(tài)時間更新方程)與式(29)(輸出測量更新方程)構成了線性卡爾曼濾波基本模型。 其中mt為測試系統的輸入過程噪聲,et為系統的觀察噪聲,假設它們是正態(tài)分布的白噪聲且相互獨立,即p(ε)~N(0,Qt),p(μ)~N(0,Rt);Qt為觀測噪聲協方差矩陣,Rt為輸入噪聲協方差矩陣。 假設給定參數的觀測值yt并知道t 時刻之前的過程,設t 時刻先驗狀態(tài)估計為′t、后驗狀態(tài)估計為t,先驗估計誤差可以定義為,后驗估計誤差可以定義為,則為先驗誤差協方差,為后驗估計協方差。 式中Kt(yt-′t)為誤差值,反應的是實際觀測值yt和觀測估計Ht′t之間的誤差關系;矩陣Kt代表的是卡爾曼增益,式(32)~(34)為計算該增益的方程。 經過以上分析,可以推導出發(fā)動機測試參數誤差修正卡爾曼濾波器的基本算法如下: 其狀態(tài)預測方程如式(35): 協方差預測方程如式(36): 利用式(32)~(34)可以計算參數預估的卡爾曼增益,式(30)可計算觀測估計值,式(31)可進行狀態(tài)更新。 利用式(37)進行協方差更新: 利用上述卡爾曼濾波算法進行遞歸計算,可以實現發(fā)動機參數測試誤差的修正。 針對引言中某型航空發(fā)動機性能測試中的兩個動態(tài)變化類參數的測試數據。本節(jié)利用上述方法分別對其誤差進行了修正,圖1、圖2分別給出了兩個參數的動態(tài)預估修正結果,表5、表6為針對兩個參數分別截取的10 個序列數據以及各修正方法的修正結果數據對比。 圖1 參數1動態(tài)誤差預估修正對比圖 圖2 參數2動態(tài)誤差預估修正對比圖 表5 參數1誤差修正數據對比 表6 參數2誤差修正數據對比 從圖3 和表5 可以看出,在參數1 動態(tài)測試的中段,幾種方法的誤差修正效果都比較理想,但在開始階段和結尾階段,貝葉斯方法、灰色模型方法和神經網絡方法波動較大,而基于卡爾曼濾波的修正方法在參數1 的修正上表現出了更好的性能,尤其是第7 組數據可以看出,在測試誤差較大時,前三種方法的修正效果明顯不如第四種方法好。 從圖4 以及表6 可以看出,貝葉斯方法和神經網絡方法在針對參數2 進行誤差修正時,達不到誤差實吋修正的效果;灰色模型的修正效果較前兩種方法要好,但其波動性仍然較大;卡爾曼濾波方法依然比其他幾種方法的修正效果更好,說明卡爾曼濾波方法也適用于類似參數2 的動態(tài)誤差數據修正[23]。 本文研究了四種常用的動態(tài)誤差修正方法,選取某型航空發(fā)動機動態(tài)測試中兩個參數的誤差數據進行修正對比,第一個參數具有線性變化特點,第二個參數具有周期性和非穩(wěn)定性特點。在針對第一個參數誤差數據的修正中,四種動態(tài)誤差修正方法在時間序列的中段均表現出了較好的修正效果;但在時間序列的兩端,貝葉斯、灰色模型和神經網絡三種方法的修正結果波動較大,說明前三種方法在處理開始階段參數誤差的滯后性和結尾階段系統的不穩(wěn)定性方面不如卡爾曼濾波。在針對第二個參數誤差數據的修正中,貝葉斯和神經網絡兩種方法產生了局部誤差修正的問題,沒有實現誤差的實時修正,有待進一步改進;而灰色模型和卡爾曼濾波兩種方法,均展現出了較好的修正效果,但前者誤差實時修正效果不如后者理想。綜上可知,基于卡爾曼濾波的動態(tài)誤差修正方法在針對兩個參數的誤差修正中,修正效果沒有因為參數特點的不同而受到太大的影響,說明該方法適應性強,可以做進一步研究。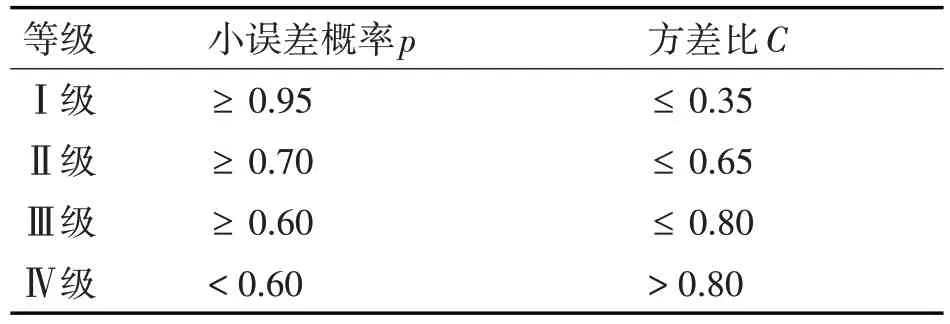
4 基于卡爾曼濾波的動態(tài)測試誤差修正方法
5 幾種動態(tài)誤差修正方法的比較

6 結語
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
北京航空航天大學學報(2017年9期)2017-12-18 07:12:25
光學精密工程(2016年6期)2016-11-07 09:07:19
Coco薇(2016年2期)2016-03-22 02:42:52
電源技術(2016年9期)2016-02-27 09:05:39
電源技術(2015年1期)2015-08-22 11:16:28
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年4期)2015-05-19 14:47:56
