SLOW MANIFOLD AND PARAMETER ESTIMATION FOR A NONLOCAL FAST-SLOW DYNAMICAL SYSTEM WITH BROWNIAN MOTION?
2021-09-06 07:54:12
School of Mathematics and Statistics,Huazhong University of Science and Technology,Wuhan 430074,China
Center for Mathematical Sciences,Huazhong University of Science and Technology,Wuhan 430074,China E-mail:hinazul fiqar@hust.edu.cn
Ziying HE (賀紫盈)
School of Science,Wuhan University of Technology,Wuhan 430074,China Center for Mathematical Sciences,Huazhong University of Science and Technology,Wuhan 430074,China E-mail:ziyinghe@whut.edu.cn
Meihua YANG (楊美化)
School of Mathematics and Statistics,Huazhong University of Science and Technology,Wuhan 430074,China E-mail:yangmeih@hust.edu.cn
Jinqiao DUAN (段金橋)
Department of Applied Mathematics,Illinois Institute of Technology,Chicago,IL 60616,USA Center for Mathematical Sciences,Huazhong University of Science and Technology,Wuhan 430074,China E-mail:duan@iit.edu
Abstract We establish a slow manifold for a fast-slow dynamical system with anomalous diffusion,where both fast and slow components are in fluenced by white noise.Furthermore,we verify the exponential tracking property for the established random slow manifold,which leads to a lower dimensional reduced system.Alongside this we consider a parameter estimation method for a nonlocal fast-slow stochastic dynamical system,where only the slow component is observable.In terms of quantifying parameters in stochastic evolutionary systems,the provided method offers the advantage of dimension reduction.
Key words Nonlocal Laplacian;fast-slow system;stochastic system;random slow manifold;exponential tracking property;parameter estimation
1 Introduction

For investigating dynamical behaviours of deterministic systems,the theory of invariant manifolds has a popular history.Hadamard[23]introduced it for the first time;it was then addressed by Lyapunov and Perron[8,12,17].For a deterministic system it has been modi fied by numerous authors[5,11,13,18,24,34].Duan and Wang[19]explained effective dynamics for the stochastic partial differential equations.Schmalfu? and Schneider[36]recently explored random inertial manifolds for stochastic differential equations with two times scales by a fixed point technique,where they eliminate the fast variables via random graph transformation.They showed that as the scale parameter approaches zero,the inertial manifold approaches some other manifold,de fined in terms of a slow manifold.Wang and Roberts[37]explored the averaging of a slow manifold for fast-slow stochastic differential equation,in which only the fast mode is in fluenced by white noise.For multi-time-scale stochastic systems,the exploration of slow manifolds was conducted by Fu,Liu and Duan[22].Bai et al.[4]recently established the existence of a slow manifold for nonlocal fast-slow stochastic evolutionary equations in which only the fast mode is in fluenced by white noise.Ren et al.[33]devised a parameter estimation method based on a random slow manifold for a finite dimensional slow-fast stochastic system.
The fundamental objective of this paper is to establish the existence of random invariant manifoldM
,for small enough?>
0,with an exponential tracking property(Section 4),and to conduct a parameter estimation by using observations only on the slow system for a nonlocal fast-slow stochastic evolutionary system(Section 5).Since the slow system is lower dimensional compared to the original stochastic system,in terms of computational cost this parameter estimator offers a bene fit.In addition,it provides the advantage of using the observations only on slow components.We verify the results regarding the slow manifold,exponential tracking property and parameter estimation in last section,via theoretical example and an example from numerical simulation.Before constructing the invariant manifold,we need to prove the existence and then the uniqueness of a solution for system(1.1)–(1.2).This is done in the next section.Many nonlocal problems explained in[6]are similar to our nonlocal system.There are usually two techniques for the establishment of invariant manifolds:the Hadamard graph transform method[18,35]and the Lyapunov-Perron method[8,12,17].For the achievement of our objective we used the Lyapunov method,which is different from the method of random graph transformation.More speci fically,it can be shown that the established manifoldM
can be asymptotically approximated to a slow manifoldM
for sufficiently small?
,under suitable conditions.In the present paper,we explore the following nonlocal fast-slow stochastic evolutionary system:

u
is inH
,v
is inH
,u
|(?1,
1)=0,v
|(?1,
1)=0.We setH
=L
(?1,
1),which denotes the space for fast variables,whileH
is some generic separable Hilbert space,which denotes the space for slow variables.Linear operatorJ
,and nonlinear interaction functionsf
andg
,will be speci fied in the next section.The constantsσ
andσ
are white noise intensities.Forx
∈R,α
∈(0,
2),

x
??,x
+?
)for?
tending to zero.The Gamma function is de fined as
H
×H
.
HereH
is a space of square integrable functions on(?1,
1);it follows thatH
=L
(?1,
1)and thatH
is some generic separable Hilbert space.Norms‖·‖and‖·‖are considered to be the norms ofH
andH
,respectively.The norm of separable Hilbert space H is de fined as
?
is a small parameter with the bound 0<?
?1,u
is a fast component andv
is a slow component.
We introduce a few fundamental concepts in random dynamical systems and nonlocal or fractional Laplacian operators in the next section.
2 Preliminaries
De finition 2.1
([16])A stochastic process{W
(ω
):t
≥0}de fined on a probability space(?,
F,
P)taking values in a Hilbert space is called a one sided Wiener process if the following conditions hold:?W
=0 a.s.;?the pathst
→W
(ω
)are continuous,a.s.;?W
has independent increments,that is,if 0≤t
<t
<t
<
···<t
,then the random variablesW
?W
,
···,W
?W
are independent;?W
has stationary increments that are Gaussian distributed.
W
andW
in equations(1.1)–(1.2)to be two-sided in time.This can be done as follows:


De finition 2.2
([3])Let(?,
F,
P)be a probability space and letθ
={θ
}be a flow on ?;that is,a mapping
which satis fies the following conditions:
?θ
=Id
;?θ
θ
=θ
,
wherer
,r
∈R;
W
(t
),taking values in state space(Hilbert space)H to be a two-sided Wiener process which depends upon timet
and also varying witht
.The de fined Wiener process has zero value att
=0.Its sample path is the space of real continuous functions on R,which is denoted byC
(R,
H).Here we take the flow,which is also measurable and de fined byθ
={θ
},as
C
(R,
H)),the distribution of the above process induces a probability measure,which is known as the Wiener measure.Instead of the wholeC
(R,
H),we consider an{θ
}invariant subset ??C
(R,
H)whose probability-measure is one.With respect to ?,we also take the traceσ
-algebra F of B(C
(R,
H)).Recalling the concept of{θ
}-invariant,a set ?is said to be{θ
}-invariant ifθ
?=?.Here we take the restriction of the Wiener measure and we still represent it by P.
On the state space H(which is often taken as a Hilbert space),the dynamics of a stochastic system over a flowθ
is depicted by a cocycle in general.De finition 2.3
([3])A cocycleφ
is de fined by the map
,
F)-measurable and satis fies the conditions
y
∈H,ω
∈? andr
,r
∈R.Thenφ
,together with metric dynamical system(?,
F,
P,θ
),constructs a random dynamical system.

is a random variable.This family is then said to be a random set.
De finition 2.4
([16])A random variabley
(ω
),
which takes values in H,is known as a stationary orbit(random fixed point)for a random systemφ
if
r
.Now the idea of the random invariant manifold is given.
De finition 2.5
([22])If a random setM
={M
(ω
):ω
∈?}satis fies the condition
ω
∈? andr
≥0,thenM
is known as a random positively invariant set.IfM
={M
(ω
):ω
∈?}can be represented by a Lipschitz mapping graph
such that

M
is said to be a Lipschitz random invariant manifold.Additionally,if,for ally
∈H,there is any
∈M
(ω
)such that
c
is a positive variable which depend upony
andy
,while?c
is a positive constant,then the random setM
(ω
)has an exponential tracking property.Now we review the asymptotic behavior of eigenvalues ofA
,(α
∈(0,
2))for the spectral problem
?
(·)∈L
(?1,
1)is extended to R by zero,just as in[25].From[25],it is known that there exists an in finite sequence of eigenvaluesλ
ofA
forα
∈(0,
2)such that
?
form a complete orthonormal set inL
(?1,
1).Lemma 2.6
([25])For the above spectral problem,
Lemma 2.7
([39])The fractional Laplacian operatorA
is a sectorial operator,which satis fies the following upper-bound:
C
is independent oft
andλ
,andC>
0 is constant.3 Framework
The framework includes a list of assumptions and the conversion of the stochastic dynamical system to a random dynamical system.
Consider the system of stochastic evolutionary equations,which depends upon two time scales as described in Section 1;that is,

We assume the following hypotheses in the fast-slow system(3.1)–(3.2):
Hypothesis H1
(Slow evolution)The operatorJ
generates aC
-semigroupe
onH
,which satis fies
γ
>
0 for allv
∈H
.
Hypothesis H2
(Lipschitz condition)Nonlinearitiesf
andg
are continuous and differentiable functions(C
-smooth)



Hypothesis H3
(Gap condition)In the system,the termK
(Lipschitz constant)of the functionsf
andg
satis fies the bound
λ
is the first eigenvalue of the fractional Laplacian operatorA
.Now we construct a random evolutionary system corresponding to the stochastic evolutionary system(3.1)–(3.2).For the achievement of this objective,we first set up the existence;after that we verify the uniqueness of the solution for equations(3.1)–(3.2)and for the Ornstein-Uhblenbeck equation.
Lemma 3.1
Let theW
taking values in Hilbert space H be a two sided Wiener process.then,under hypotheses(H1)–(H3),system(3.1)–(3.2)possesses a unique mild solution.Proof
We write system(3.1)–(3.2)in the following form:

W
taking values in Hilbert space H is a two sided Wiener process.Hence,by Theorem 7.2([15],p.188),system(3.1)–(3.2)possesses a unique mild solution.□Lemma 3.2
The nonlocal stochastic equation
A
is the fractional Laplacian operator,has the solution
ρ
(0)=ρ
is F-measurable.An equation being inH
means that every term in the equation is inH
.Remark 3.3
([4])The above lemma does not hold forα
∈(0,
1].


Consider the stochastic evolutionary equations


Introduce a random transformation

so that the original stochastic evolutionary system(3.1)–(3.2)is converted to a random evolutionary system as

f
andg
in(3.7)–(3.8)satisfy the same Lipschitz condition.LetZ
(t,ω,Z
)=(U
(t,ω,
(U
,V
)),V
(t,ω,
(U
,V
)))be the solution of(3.7)–(3.8)with initial valueZ
:=(U
(0),V
(0))=(U
,V
).By the classical theory for evolutionary equations[20],under the hypotheses(H1)–(H3),system(3.7)–(3.8)with initial data has a unique global solution for everyω
=(ω
,ω
)∈?=?×?,just like[10].Hence,the solution mapping of random evolutionary system(3.7)–(3.8),

indicates a random dynamical system.Furthermore,

is the random system generated by the original stochastic system(3.1)–(3.2).
4 Slow Manifold
In this part,we construct the existence of the slow manifold and verify the exponential tracking property for the random evolutionary system(3.7)–(3.8).To study system(3.7)–(3.8),we construct the following Banach spaces in term of functions with a weighted geometrically sup norm[38]:for anyβ
∈R,
with the norms

Similarly,we de fine

with the norms

μ
be a number which satis fies
Now,for the achievement of our goal,the following Lemma from[10]is needed:
Lemma 4.1
Consider the so-called Lyapunov-Perron equation
V
∈H
,whereU
(s,ω
;V
)andV
(s,ω
;V
)are the solutions of system(3.7)–(3.8)with initial valueZ
=(U
,V
)satisfying the form
Theorem 4.2
(Slow manifold)Suppose that(H1)–(H3)hold and that?>
0 is small enough.Then random evolutionary system(3.7)–(3.8)possesses a Lipschitz random slow manifoldM
(ω
)represented by a graph
is a graph mapping with a Lipschitz constant satisfying

Remark 4.3
Since there is a relation between the solutions of stochastic evolutionary system(3.1)–(3.2)and random system(3.7)–(3.8),if system(3.1)–(3.2)satis fies the conditions described in Theorem 4.1,then it also possesses a Lipschitz random invariant manifold
Remark 4.4
Iff
andg
areC
,and the large spectrum gap condition mentioned in previous work[17]holds,then it can be proved in a fashion similar to[17]that the manifolds areC
-smooth.Proof of Theorem 4.1
To establish an invariant manifold corresponding to the random dynamical system(3.7)–(3.8),we first consider the integral equation
t
≤0.The Lyapunov-Perron trans form Iis


Hence,combining this with the de finition of I,we obtain that

C
,i
=1,
2,
3,
4 are constants and

Furthermore,to show that the map Iis contractive,we take
which implies that

?
→0 such that


Furthermore,

Thus,we obtain the upperbound

ω
∈?,V
,V
∈H
.
Step 2
With help of the unique solution described in Step 1,we construct the mappingH
as follows:
Then,owing to(4.3),we obtain upperbound

V
,V
∈H
andω
∈?.This implies that
V
,V
∈H
andω
∈?.Then,by Lemma 4.3,it follows that
Step 3
In this step,to prove thatM
(ω
)is a random set,we prove that,for anyz
=(u,v
)∈H=H
×H
,
is measurable(Theorem III.9 in Casting and Valadier[9],p.67).Let separable space H have a countable dense set,say,H.Then the right hand side of(4.5)is equal to

Step 4
Now it only remains to show that the random setM
(ω
)is positively invariant;that is,we prove that for eachZ
=(U
,V
)∈M
(ω
),Z
(s,ω,Z
)∈M
(θ
ω
)for alls
≥0.
Finally,for every fixeds
≥0,
we may observe thatZ
(t
+s,ω,Z
)is a solution of
Z
(0)=(U
(0),V
(0))=Z
(s,ω,Z
).


Here Cand Care positive constants.
Remark 4.6
By the relationship between the solutions of(3.1)–(3.2)and(3.7)–(3.8),if system(3.7)–(3.8)has an exponential tracking manifold,so does the original stochastic system(3.1)–(3.2).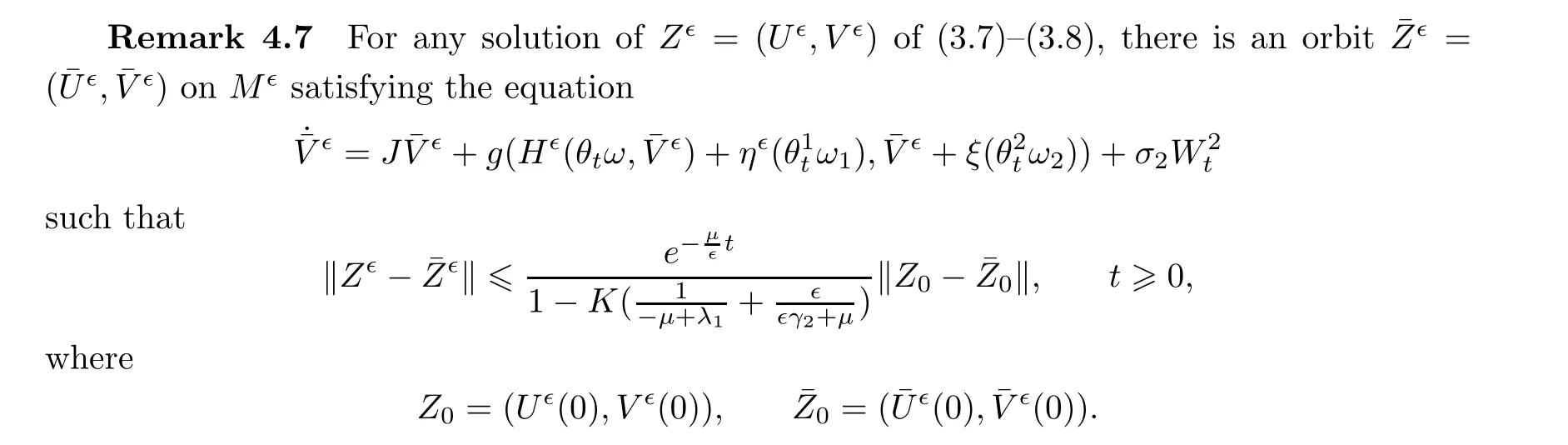



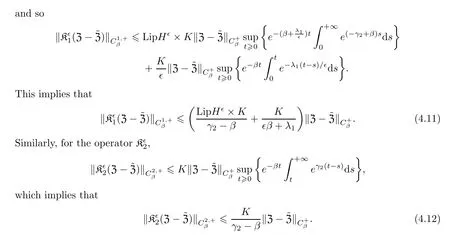
From Theorem 4.1,we know that

Now,we get the upperbound by combining(4.11)and(4.12):

?
>
0 such that


Furthermore,

which means that

M
(ω
)is obtained,this completes the proof.
With the help of Remarks 4.4 and 4.5,we get a reduced system based on a slow manifold for the original fast-slow stochastic evolutionary system(3.1)–(3.2),stated as Theorem 4.3.

5 Parameter Estimation on Random Slow Manifold
Assume that original slow equation(3.2)has an unknown parameterd
∈R and that we know that its range is denoted by∧,which is a close interval.In other words,the nonlocal fast-slow system(3.1)–(3.2)becomes
In this section,we establish a parameter estimation method for a nonlocal stochastic system by using only the observations on the slow component,and we do so with on error estimation.
5.1 Parameter estimation based on reduced slow system




Importance
The slow system has a lower dimension than the original nonlocal stochastic system.In terms of computational cost our method offers the bene fit of using observations only on slow components;compared to fast components,it is often much more reliable to observe slow components[33].
d
in(5.1)–(5.2)using the reduced slow system




and now,by Cauchy-Schwarz inequality,


By using a variation of constants formula,we obtain that

and then



By using a variation of constants formula,we obtain that


By Gronwall’s inequality,we obtain
Now,we conclude by exchanging the order of integrals as follow:

Thus,by Cauchy-Schwartz inequality,

Consider the integral term,which is on the left hand side of(5.8),and set

then the approximate reduced slow system is

for the estimation.Note that


6 Examples
To observe the results regarding the existence of slow manifolds which were obtained in the previous section,let us look at a few examples.

Example 6.1
Take a system withγ
=0,system(6.1)–(6.2)has a random manifoldM
(ω
)={(H
(ω,V
),V
):V
∈H
}with an exponential tracking property if
?>
0 is sufficiently small.The preceding system may be a model of certain biological processes[14,21,30].
In Example 2,we illustrate our analytical results via numerical simulation.
Example 6.2
Take a fast-slow stochastic system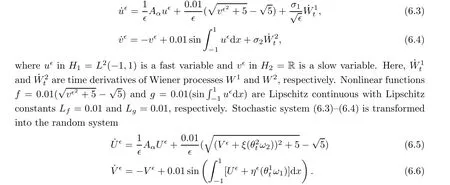
?>
0,such that
?
).Lett
=τ?
and
U
(0)=H
(ω,V
)=H
+?H
+...,
andV
(0)=V
.
Then,


Finally,the approximate reduced slow system is

We conducted the numerical simulations to illustrate the slow manifold,the exponential attracting property and the parameter estimation based on the slow system in Figures 1–4.

Figure 1 Random slow manifold for different samples for Example 2
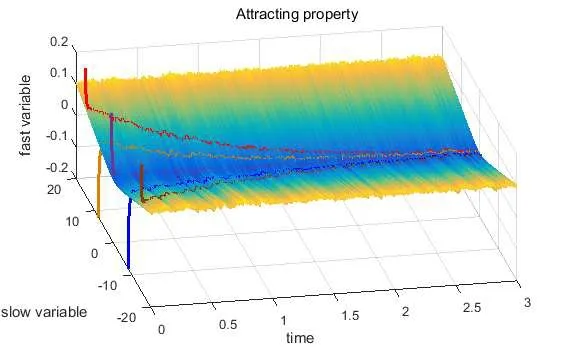
Figure 2 Exponential tracking property for Example 2:σ1=σ2=0.1,α=1.2 and?=0.01.It shows that all solutions are attracted towards the evolutionary slow manifold.

Figure 3 Parameter estimation for the original fast-slow nonlocal stochastic system.For Example 2:σ1=σ2=0.1,α=1.2 and?=0.01.The estimation value is 5.0000 with error 9.7656e-05 and objective function value is 2.9724e-31 after 19 number of iterations and 3980.714622 seconds

Figure 4 Parameter estimation for the reduced slow system for Example 2:σ1=σ2=0.1,α=1.2 and?=0.01.The estimation value is 5.0573 with error 0.0573 and objective function value is 1.0979e-07 after 33 number of iterations and 645.638133 seconds
Each curve stands for a sample:σ
=σ
=0.
1,α
=1.
2 and?
=0.
01.From Figures 3 and 4,we can conclude that the error for the simulation of parameter estimation based on the reduced system is nearly equal to the error based on the original system.However,simulation of parameter estimation based on the reduced system needs much less time than the original system,so it is acceptable.
 Acta Mathematica Scientia(English Series)2021年4期
Acta Mathematica Scientia(English Series)2021年4期
- Acta Mathematica Scientia(English Series)的其它文章
- REGULARITY OF WEAK SOLUTIONS TO A CLASS OF NONLINEAR PROBLEM?
- EXISTENCE TO FRACTIONAL CRITICAL EQUATION WITH HARDY-LITTLEWOOD-SOBOLEV NONLINEARITIES?
- A DIFFUSIVE SVEIR EPIDEMIC MODEL WITH TIME DELAY AND GENERAL INCIDENCE?
- ON A COUPLED INTEGRO-DIFFERENTIAL SYSTEM INVOLVING MIXED FRACTIONAL DERIVATIVES AND INTEGRALS OF DIFFERENT ORDERS?
- CLASSIFICATION OF SOLUTIONS TO HIGHER FRACTIONAL ORDER SYSTEMS?
- ENERGY CONSERVATION FOR SOLUTIONS OF INCOMPRESSIBLE VISCOELASTIC FLUIDS?