考慮優(yōu)化調(diào)度的微電網(wǎng)頻率恢復(fù)分布式預(yù)測(cè)控制策略
2024-04-01 05:11:50鐘鳴韓如磊王宇強(qiáng)
科學(xué)技術(shù)與工程 2024年8期
鐘鳴, 韓如磊, 王宇強(qiáng)
(1.內(nèi)蒙古電力科學(xué)研究院, 呼和浩特 010020; 2.內(nèi)蒙古自治區(qū)電力系統(tǒng)智能化電網(wǎng)仿真企業(yè)重點(diǎn)實(shí)驗(yàn)室, 呼和浩特 010020)
微電網(wǎng)(microgrids,MG)是未來(lái)電力系統(tǒng)的一個(gè)重要組成部分,因?yàn)樗鼈兡軌驅(qū)崿F(xiàn)分布式能源(distributed energy, DER)的全面集成[1]。MG被定義為明確定義的電氣邊界內(nèi)的一組相互連接的負(fù)荷和DER,作為電網(wǎng)的一個(gè)單一可控實(shí)體[2]。分布式微電網(wǎng)控制由于其可靠性強(qiáng)得到了廣泛的應(yīng)用,如何實(shí)現(xiàn)微電網(wǎng)分布式控制成為研究的重點(diǎn)領(lǐng)域。
針對(duì)分布式微電網(wǎng)系統(tǒng),通信時(shí)延以及網(wǎng)絡(luò)丟包等對(duì)系統(tǒng)穩(wěn)定性會(huì)產(chǎn)生較大的影響。文獻(xiàn)[3]將時(shí)延設(shè)計(jì)為電網(wǎng)模型的不確定性,提出了一種基于隨機(jī)矩陣?yán)碚摲€(wěn)定性分析的魯棒控制方法。文獻(xiàn)[4]針對(duì)時(shí)延問(wèn)題,引入深度神經(jīng)網(wǎng)絡(luò)對(duì)通信時(shí)延進(jìn)行補(bǔ)償,從而實(shí)現(xiàn)電網(wǎng)的穩(wěn)定性控制。文獻(xiàn)[5]將通信時(shí)延建模為系統(tǒng)擾動(dòng),然后設(shè)計(jì)了一種基于滑模觀測(cè)器的魯棒控制方法提升了對(duì)通信時(shí)延的魯棒性。雖然上述方法降低了時(shí)延對(duì)系統(tǒng)控制的影響,沒(méi)有實(shí)現(xiàn)功率調(diào)度的一致性。獨(dú)立MG的控制任務(wù)分為3個(gè)控制級(jí)別,每個(gè)控制級(jí)別在不同的時(shí)間尺度上運(yùn)行,然而,由于使用可再生能源和PE接口,MG具有低慣性,二級(jí)和三級(jí)控制之間的時(shí)間尺度分離可能會(huì)產(chǎn)生消極影響。
模型預(yù)測(cè)控制在MG控制中也發(fā)揮了重要作用。文獻(xiàn)[6]中的非線性分布式模型預(yù)測(cè)控制(distributed model predictive control,DMPC)被描述為并網(wǎng)微電網(wǎng)的第三級(jí)能源管理系統(tǒng),它依賴于外部負(fù)荷預(yù)測(cè)。文獻(xiàn)[7]提出了一種用于頻率和電壓恢復(fù)的反饋線性化DMPC,將電感電容(inductance capacitance,LC)濾波器輸出的電壓和電流作為狀態(tài)變量。文獻(xiàn)[8]提出了一種用于電壓恢復(fù)的DMPC控制器,而頻率是通過(guò)(deep adaptive proportional integral,DAPI)控制器的變化和有限時(shí)間觀測(cè)器來(lái)恢復(fù)的。文獻(xiàn)[9]提出了一種基于乘法器算法的交流方向DMPC控制器,通過(guò)操縱電壓敏感負(fù)載的電壓來(lái)調(diào)節(jié)網(wǎng)絡(luò)化MG系統(tǒng)中的頻率。文獻(xiàn)[10]提出并通過(guò)實(shí)驗(yàn)驗(yàn)證一種用于頻率和電壓恢復(fù)的DMPC,該DMPC使用下垂模型和功率傳輸模型來(lái)實(shí)現(xiàn)無(wú)功比例功率分配,其中功率共享是基于使用鄰接矩陣對(duì)MG中每個(gè)發(fā)電機(jī)組的實(shí)際功率和無(wú)功功率貢獻(xiàn)進(jìn)行關(guān)聯(lián)。然而上述方法僅考慮了快速頻率恢復(fù),未能實(shí)現(xiàn)高效的分布式微電網(wǎng)功率調(diào)度。
為了解決快速頻率恢復(fù)和緩慢功率調(diào)度之間的時(shí)間尺度分離問(wèn)題,提出一種考慮優(yōu)化調(diào)度的微電網(wǎng)頻率恢復(fù)分布式預(yù)測(cè)控制策略,在同一時(shí)間尺度上處理經(jīng)濟(jì)調(diào)度和頻率恢復(fù)問(wèn)題,并且通過(guò)模型預(yù)測(cè)控制實(shí)現(xiàn)最優(yōu)調(diào)度。研究方法能夠有效應(yīng)用于電網(wǎng)控制調(diào)度,保證控制精度的同時(shí)極大降低經(jīng)濟(jì)成本。
1 相關(guān)理論
1.1 集中式功率調(diào)度
考慮三相平衡MG與一組P個(gè)分布式發(fā)電機(jī)組(distributed generator,DG),其中P是MG中DG的集合,P={1,2,…,p}。最優(yōu)調(diào)度是在保證總負(fù)荷滿足的前提下,確定可控制發(fā)電機(jī)組的最小成本調(diào)度。最優(yōu)調(diào)度如式(1)所示。傳統(tǒng)的集中式功率調(diào)度式(1)依賴于唯一的中央控制器,其故障會(huì)影響微電網(wǎng)的功率調(diào)度。因此,分布式控制是提高微電網(wǎng)可靠性和安全性的方案。
(1)
式(1)中:Pi為分布式發(fā)電機(jī)組i的實(shí)際功率貢獻(xiàn);Ci(Pi)為凸成本函數(shù);PD為MG總負(fù)荷;實(shí)際功率貢獻(xiàn)P={Pi:i∈P}。
假設(shè)強(qiáng)對(duì)偶成立,如Slater的約束條件成立,則問(wèn)題可通過(guò)拉格朗日對(duì)偶表示,最優(yōu)調(diào)度問(wèn)題的拉格朗日函數(shù)為
(2)
式(2)中:拉格朗日乘數(shù)η與功率平衡約束相關(guān)。
式(3)中定義了問(wèn)題的KKT(Karush-Kuhn-Tucker)平穩(wěn)條件。從式(3)可以確定在最佳點(diǎn),必須應(yīng)用式(4)定義的增量成本(incremental cost,IC)函數(shù)。

(3)
η=?Ci(Pi),i∈P
(4)
式中:?為哈密爾頓算子。
第i臺(tái)DG的發(fā)電成本函數(shù)如式(5)所示,第i臺(tái)DG的IC由式(6)給出。
(5)
ηi(Pi)=2aiPi+bi
(6)
式中:ai、bi和ci為定義的成本參數(shù)。
η為拉格朗日乘數(shù),功率調(diào)度問(wèn)題重新分配所有DG的功率貢獻(xiàn),從而根據(jù)式(4)獲得相同的η,其中η對(duì)應(yīng)于與微電網(wǎng)最優(yōu)調(diào)度問(wèn)題的供需平衡方程[式(1)]相關(guān)聯(lián)的雙變量。因此,可以設(shè)計(jì)一種分布式方案,以確保ηi=ηj=η處于穩(wěn)定狀態(tài),其中ηj為相鄰DG的IC。此分布式方案本質(zhì)上滿足供需平衡。
1.2 分布式模型預(yù)測(cè)控制
模型預(yù)測(cè)控制(model predictive control,MPC)是一種多變量控制器,它采用過(guò)程模型,并允許在其公式中包含目標(biāo)函數(shù)和約束條件,因此在微電網(wǎng)中得到了廣泛的應(yīng)用。MPC通過(guò)計(jì)算控制動(dòng)作序列在每個(gè)采樣時(shí)間解決優(yōu)化問(wèn)題,以實(shí)現(xiàn)問(wèn)題目標(biāo);但是,僅對(duì)系統(tǒng)應(yīng)用第一個(gè)控制動(dòng)作,并且每次再下一個(gè)采樣時(shí)間再次求解優(yōu)化問(wèn)題。盡管集中式MPC為問(wèn)題提供全局解決方案,但它的主要缺點(diǎn)是需要大型通信結(jié)構(gòu),這可能會(huì)導(dǎo)致延遲通信故障并有可能危及整個(gè)系統(tǒng)的運(yùn)行。由于計(jì)算負(fù)擔(dān)隨著優(yōu)化變量數(shù)量的增加而呈指數(shù)增長(zhǎng),因此計(jì)算負(fù)擔(dān)較高。DMPC在解決局部?jī)?yōu)化問(wèn)題的基礎(chǔ)上工作,考慮來(lái)自鄰域的共享信息,控制器之間的信息交換使DMPC能夠?qū)崿F(xiàn)與集中式方法相同的作用,并且能夠減少計(jì)算負(fù)擔(dān),另外在發(fā)生故障時(shí)更具魯棒性。此外,DMPC簡(jiǎn)化了微電網(wǎng)的可伸縮性,并保留了即插即用的能力,因?yàn)楫?dāng)連接或斷開(kāi)DG時(shí),不需要更改程序。
1.3 本文分布式控制方案
所提出的控制器既不依賴于MG的電氣拓?fù)?也不依賴于相鄰的物理測(cè)量,即只需要LC輸出濾波器和電壓觀測(cè)器處的測(cè)量。因此,總線和配電線路的數(shù)量影響較小,為了避免對(duì)整個(gè)MG建模,LC輸出濾波器和MG連接節(jié)點(diǎn)之間需要小耦合電感Li,如圖1所示,這些電感可以替代虛擬阻抗控制器。

V為電壓;Q為無(wú)功功率;L為電感;P為有功功率;Z為阻抗;ω為角速度;θ為相位角

通過(guò)給定一類非線性系統(tǒng),即
(7)
式(7)中:x∈Rn×1為狀態(tài)向量;u∈Rm×1為輸入向量;滿足F∈Rn×n和g∈Rn×1;狀態(tài)向量可以劃分為x=[xaxb]T,其中,xa∈Rna×1為可測(cè)量變量,xb∈Rnb×1為不可測(cè)量的變量。
式(7)可表示為

(8)
式(8)中:N、M、R、S為系統(tǒng)矩陣;ga、gb分別為可測(cè)量輸入變量和不可測(cè)量輸入變量。

(9)
式(9)中:ω0為標(biāo)準(zhǔn)頻率;Vm為微電網(wǎng)的總電壓。
將基爾霍夫電壓定律應(yīng)用于圖1的電路,得到表示測(cè)量狀態(tài)方程,可表示為
(10)

測(cè)量狀態(tài)xa和估計(jì)狀態(tài)xb,可得


(11)
觀測(cè)器的結(jié)構(gòu)可表示為
(12)

(13)
式(13)中:T為狀態(tài)向量;ω1、ω2分別為兩個(gè)角速度輸出向量;gv為收益。
通過(guò)極點(diǎn)配置式(14)獲得估計(jì)誤差動(dòng)態(tài)Ar,使觀測(cè)器能夠跟蹤估計(jì)電壓的相位,并且比二級(jí)控制器更快。最后,收益gv為-31 500,Br的表達(dá)式如式(15)所示。
(14)

(15)
每個(gè)DG的控制器方案如圖1所示,每個(gè)DG配置為電壓源逆變器(voltage source inverter,VSI)及其各自的LC輸出濾波器,高亮顯示兩個(gè)控制層。第一級(jí)控制由角速度-有功功率(ω-P)、電壓-無(wú)功功率(V-Q)降控制器、外部電壓和內(nèi)部電流控制器組成,這些控制器在直接正交框架上工作。

1.4 通信結(jié)構(gòu)
為了在相鄰DG之間共享信息,DMPC控制器使用全雙工通信網(wǎng)絡(luò)。該網(wǎng)絡(luò)的使用考慮了延遲和連接問(wèn)題。前者表示數(shù)據(jù)包到達(dá)目的地的時(shí)間間隔τij,后者反映DG之間的通信拓?fù)洹Q舆tτij以采樣周期表示,τij=τji。DGj的雙向連接由非負(fù)加權(quán)鄰接矩陣A的鄰接項(xiàng)aij定義,由于通信是雙向的,關(guān)聯(lián)圖是無(wú)向的,因此,aij=aji。
(16)
1.5 動(dòng)態(tài)模型
由于所提出的控制器考慮了MG的實(shí)際情況,因此包含了控制構(gòu)成MG的DG動(dòng)態(tài)的模型。這些模型如式(17)所示,局部第i個(gè)DG的頻率-實(shí)際功率[即ω(t)-P(t)]的下垂模型如式(18)所示,允許DG通過(guò)產(chǎn)生頻率偏差來(lái)描述MG中的實(shí)際功率變化;此外,通過(guò)該模型,可以連接一級(jí)控制和二級(jí)控制。
為了確定從第i個(gè)DG傳輸MG的功率,必須確定相位角差。局部DG單元和MG之間通過(guò)耦合電感Li的相位角差δθi在式(18)中定義。
功率傳輸方程[式(19)]用于控制每個(gè)DG裝置對(duì)MG的實(shí)際功率貢獻(xiàn)。式(19)避免了使用導(dǎo)納矩陣,因?yàn)檫@降低了DG單元的即插即用能力。
ωi(t)=ω0+Mpω,iPi(t)+ωs,i(t)
(17)

(18)
(19)
1.6 離散時(shí)間模型

ωi(k+1)=ωi(k)+Mpω,i[Pi(k+1)-Pi(k)]+Δωs,i(t)
(20)
(21)

(22)
2 分布式預(yù)測(cè)控制
2.1 問(wèn)題描述
MPC使用系統(tǒng)的離散時(shí)間模型預(yù)測(cè)MG在預(yù)測(cè)范圍Ny內(nèi)的行為,并通過(guò)最小化成本函數(shù)的數(shù)值優(yōu)化問(wèn)題優(yōu)化控制序列Nu。預(yù)測(cè)層和控制層的變量包含在向量Xi中,只有第一個(gè)控制動(dòng)作應(yīng)用于系統(tǒng),最優(yōu)控制問(wèn)題在每個(gè)采樣時(shí)間重復(fù),并進(jìn)行更新。在二級(jí)控制中實(shí)施MPC控制器的一個(gè)難點(diǎn)是定義一個(gè)優(yōu)化問(wèn)題,該問(wèn)題具有較低的計(jì)算負(fù)擔(dān),并且可以在較短的采樣周期內(nèi)求解優(yōu)化問(wèn)題。
預(yù)測(cè)第i個(gè)DG在k+m階躍下的響應(yīng),其中m∈Z+,在式(23)中擴(kuò)展了式(17)的方程組。盡管線性化過(guò)程中產(chǎn)生的系數(shù)在每次采樣時(shí)都會(huì)更新,但在優(yōu)化過(guò)程中它們是恒定的。
ωi(k+m)=ωi(k+m-1)+Mpω,i[Pi(k+m)-Pi(k+m-1)]+Δωs,i(k+m-1)
(23)
(24)
(25)
MPC公式中包含一組操作約束,等式約束以確保控制器具有一定性能,不等式約束確保解決方案在每個(gè)DG的物理功率容量范圍內(nèi)。
式(26)表示局部平均頻率,該平均值僅使用從其他DG傳送的信息計(jì)算,該信息由鄰接項(xiàng)aij確定,這兩個(gè)參數(shù)分別提供了對(duì)通信故障和延遲影響的魯棒性,包括終端約束[式(27)]以保證分布式預(yù)測(cè)方案收斂到預(yù)測(cè)視界Ny末端的跟蹤值。
(26)
(27)
預(yù)測(cè)范圍的IC如式(28)所示,該參數(shù)用于控制器的目標(biāo)函數(shù)為
ηi(k+m)=2aiPi(k+m)+bi
(28)
式(28)中:ai為非負(fù)加權(quán)鄰接矩陣A的鄰接項(xiàng)。
最后,通過(guò)不等式約束式(29),第i個(gè)DG的實(shí)際功率貢獻(xiàn)僅限于其物理容量。
Pimin(k)≤Pi(k+m)≤Pimax(k)
(29)
式(29)中:Pimin(k)、Pimax(k)分別為最小功率和最大功率。
2.2 成本函數(shù)
多目標(biāo)成本函數(shù)如式(30)所示,由3個(gè)加權(quán)項(xiàng)組成,第一項(xiàng)表示平均頻率恢復(fù),僅使用從其他DG傳輸?shù)男畔⒂?jì)算平均頻率恢復(fù)。第二項(xiàng)調(diào)整超調(diào)量和穩(wěn)定時(shí)間。第三項(xiàng)通過(guò)局部DG和相鄰DG之間對(duì)預(yù)測(cè)IC實(shí)現(xiàn)功率調(diào)度。因此,在目標(biāo)函數(shù)內(nèi)強(qiáng)制執(zhí)行穩(wěn)態(tài)條件ηi=ηj=η。

(30)

2.3 二次規(guī)劃公式
由于所考慮的控制器具有凸成本函數(shù)和線性約束,因此使用二次規(guī)劃(quadratic programming,QP)對(duì)其進(jìn)行求解。成本函數(shù)[式(30)]及其各自的等式和不等式約束式(23)~式(29)通過(guò)矩陣/向量Hi、Ai、Bi、Aeq,i、Beq,i、Fi包含在式(31)中。QP問(wèn)題的輸出在式(32)中,其中預(yù)測(cè)變量集包含在Xp,i中,最優(yōu)控制序列用XΔ,i表示。
(31)
Xi={Xp,i,XΔ,i}
(32)

(33)
(34)
根據(jù)MPC原理,頻率-功率下垂控制器只應(yīng)用第一個(gè)預(yù)測(cè)控制動(dòng)作XΔ,i,然后使用更新的測(cè)量值/估計(jì)值在每個(gè)采樣時(shí)間重復(fù)優(yōu)化。為了減少通信網(wǎng)絡(luò)上的通信量,式(35)的Yi僅可以共享預(yù)測(cè)結(jié)果。
(35)
為了計(jì)算QP問(wèn)題[式(34)],使用QPKWIK算法[12]。該求解器能夠生成C++代碼,以便在實(shí)驗(yàn)裝置上運(yùn)行。算法1中描述了解決DMPC方案的方法,具體步驟如下。
算法1 用于DGi的DMPC解決方案
收到的信息:Yij,?j={1,2,…,p}
輸出:Xi,Δωs,i(k)
初始化:
1:計(jì)算Hi、Ai、Bi、Aeq,i、Beq,i、Fi的矩陣/向量系數(shù)
2:每k個(gè)步長(zhǎng)進(jìn)行一次
3:根據(jù)接收到的信息計(jì)算鄰接項(xiàng)aij。
4:根據(jù)接收到的信息,從式(9)和式(12)中計(jì)算頻率和增量成本之和。
6:使用QPKWIK算法解決QP問(wèn)題。
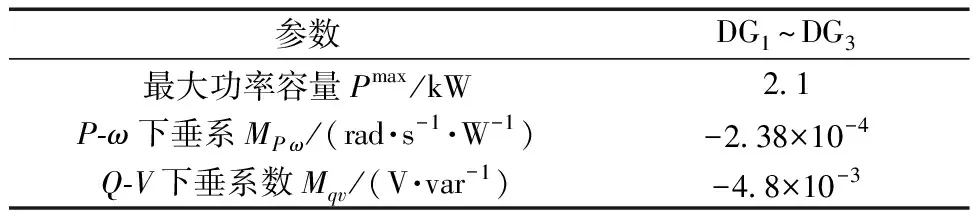
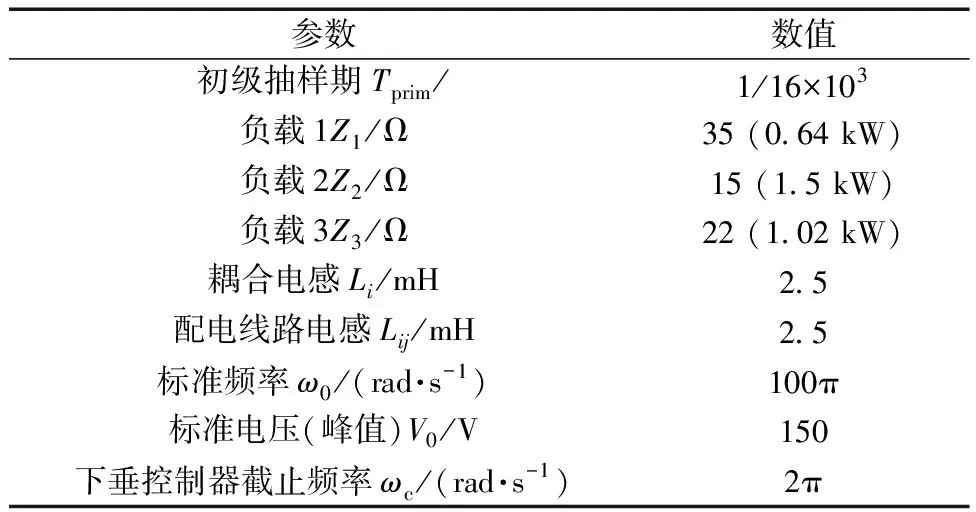
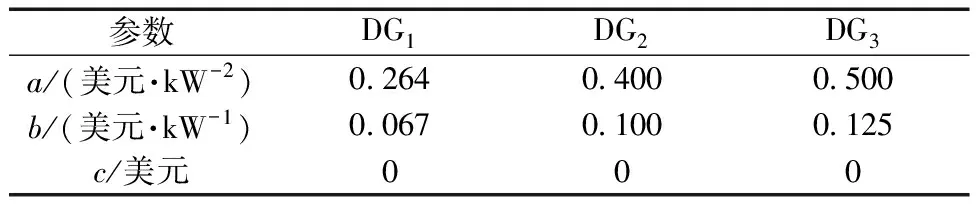
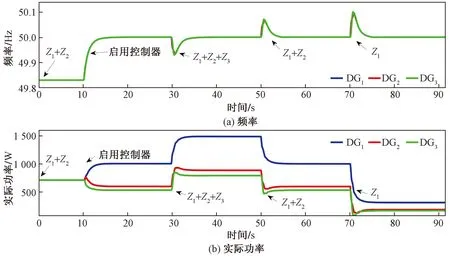
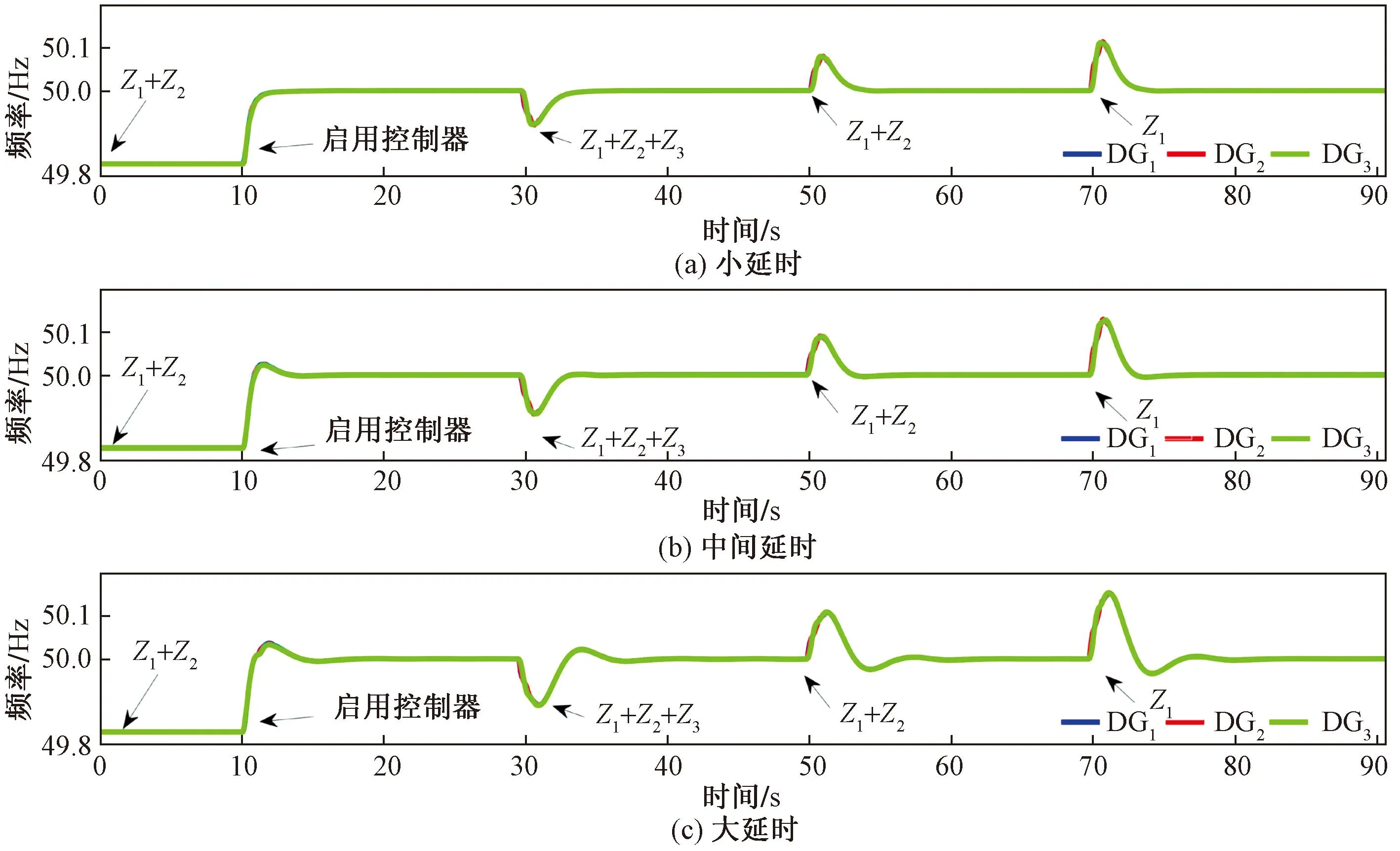
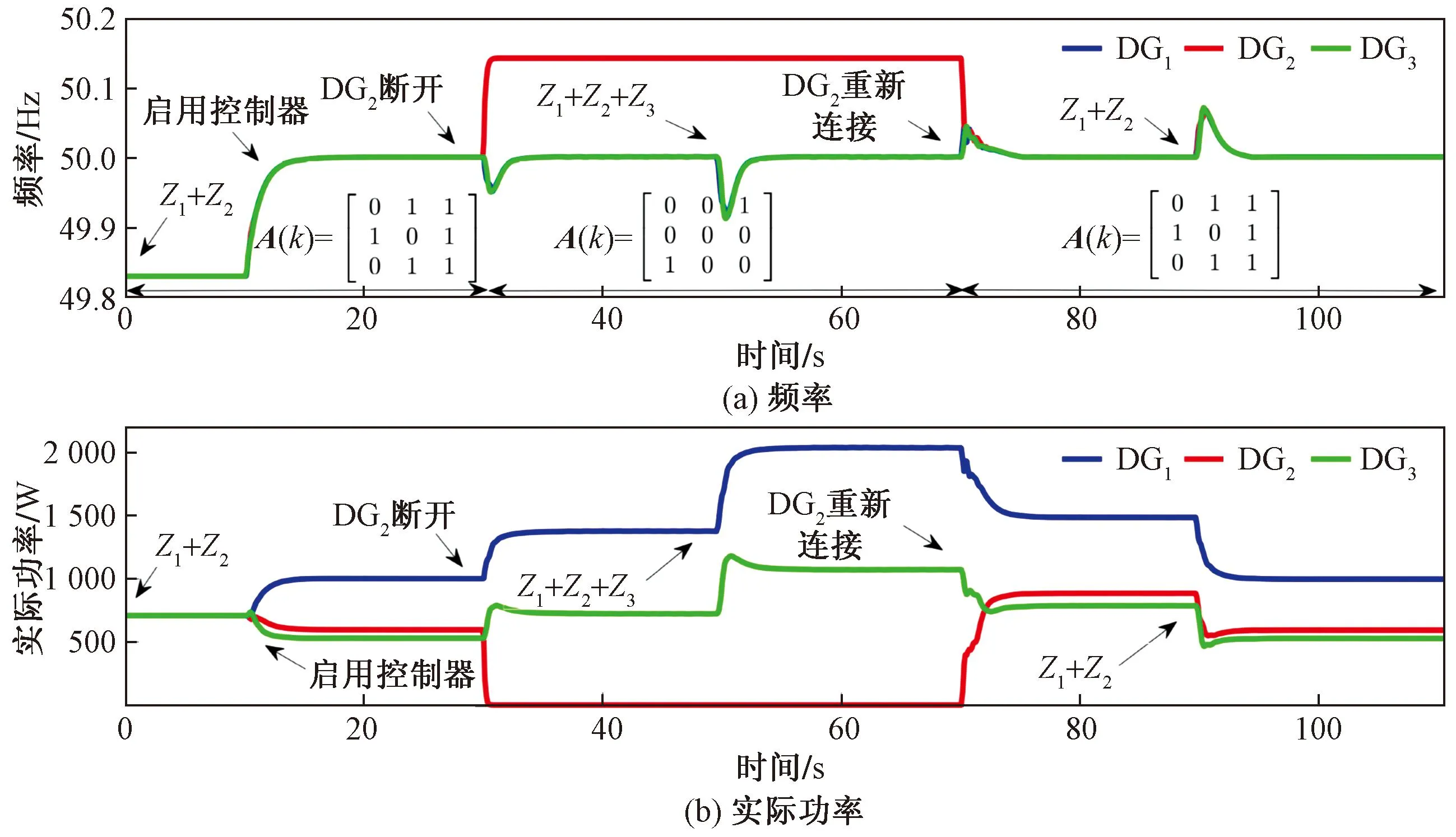
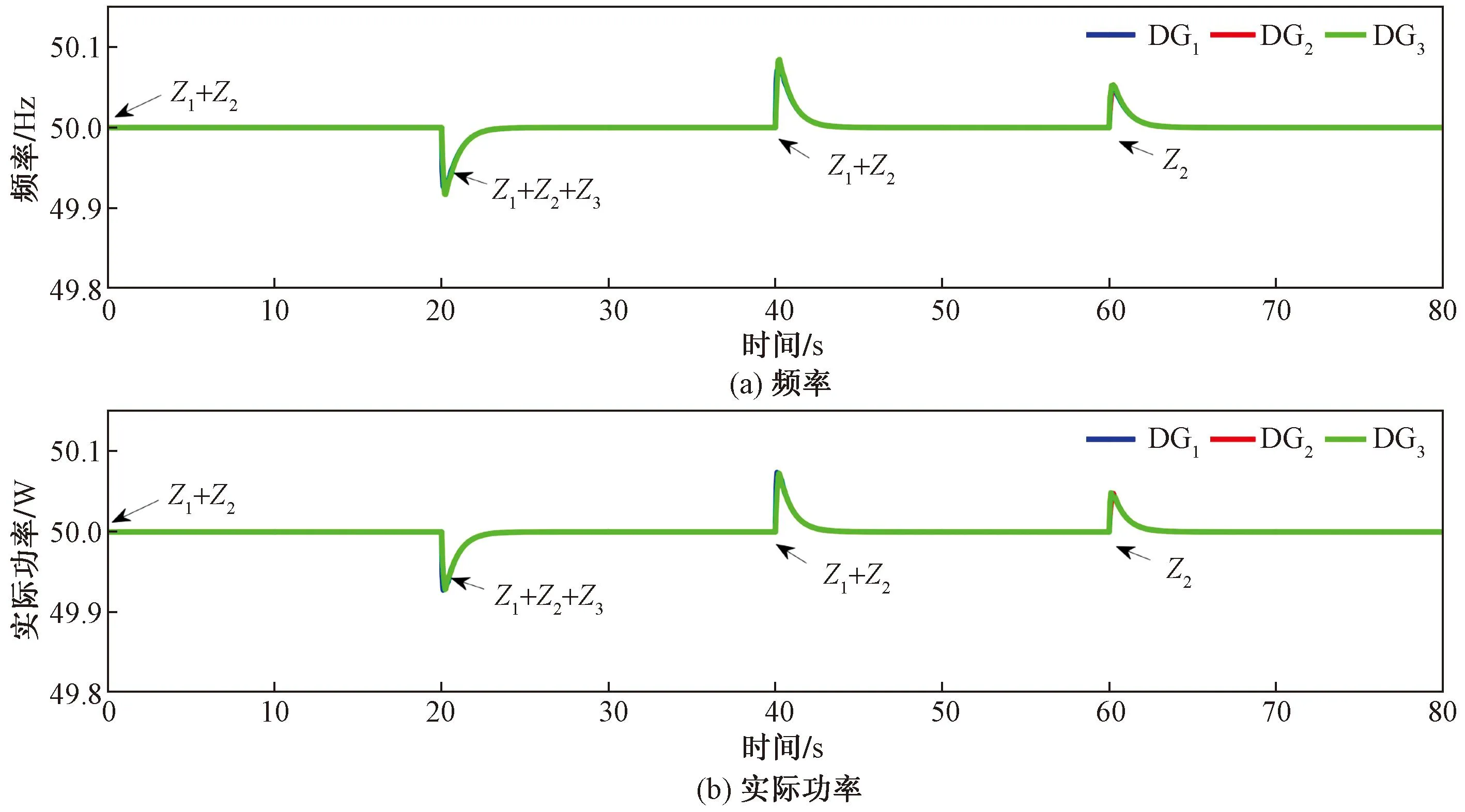
7:如果Xi是可行的,那么t 8:從Xi中提取Δωs,i(k)。 9:否則 10:Δωs,i(k)=0。 11:結(jié)束假設(shè) 12:如果可行,更新控制器輸出并向相鄰DG發(fā)送Yi 13:結(jié)束 使用圖2所示的實(shí)驗(yàn)MG配置評(píng)估DMPC控制策略的性能,其中相關(guān)變量均可在正文中找到相應(yīng)解釋。這個(gè)實(shí)驗(yàn)MG是在MG控制實(shí)驗(yàn)室中建造的,包括3個(gè)DG單元,由PM15F120(DG 1和DG2)和PM5F60(DG3)三相?模擬,如圖2所示。每個(gè)DG單元由實(shí)時(shí)目標(biāo)(RTT)計(jì)算機(jī)控制,并且運(yùn)行DMPC控制算法。最小估計(jì)延遲對(duì)應(yīng)于二級(jí)采樣時(shí)間的一個(gè)采樣周期,表1和表2分別給出下垂參數(shù)和電氣參數(shù)。 表1 功率容量和下垂斜率Table 1 Power capacity and sag slope 表2 MG參數(shù)Table 2 MG parameters δθ為相位角差;V為電壓;Q為無(wú)功功率;L為電感;P為有功功率;Z為阻抗;ω為角速度;θ為相位角;DG(distributed generator)為分布式發(fā)電機(jī)組;MG(micro-grid)為微電網(wǎng);RTT(round trip time)為實(shí)時(shí)目標(biāo)模塊 表3給出了DMPC設(shè)計(jì)參數(shù)和權(quán)重系數(shù),選擇所有設(shè)計(jì)參數(shù)的目的是減少總體計(jì)算負(fù)擔(dān),這是因?yàn)橛?jì)算復(fù)雜度隨著采樣時(shí)間以及預(yù)測(cè)和控制范圍的增加而大大增加,當(dāng)選擇采樣時(shí)間時(shí),考慮到頻率開(kāi)環(huán)上升時(shí)間(Tr=0.7 s)為Tsec=0.05 s,預(yù)測(cè)和控制范圍選5個(gè)樣本,從而使得通信網(wǎng)絡(luò)上的通信量減少。通過(guò)啟發(fā)式調(diào)整權(quán)重因子,尋找控制目標(biāo)之間的權(quán)衡。表4[13]列出了文獻(xiàn)[13]中各DG機(jī)組的發(fā)電成本。 表3 控制器參數(shù)和權(quán)重Table 3 Controller parameters and weights 表4 DG成本參數(shù)Table 4 DG Cost parameters 使用實(shí)驗(yàn)MG在4種情景下對(duì)控制器進(jìn)行了測(cè)試,第1個(gè)情景展示了MG發(fā)生負(fù)載變化時(shí)DMPC的性能,第2個(gè)情景顯示了在通信網(wǎng)絡(luò)上存在延遲效應(yīng)時(shí)MG的行為,第3個(gè)情景顯示了通信網(wǎng)絡(luò)故障的影響。最后一個(gè)情景驗(yàn)證即插即用功能,其中DG2從MG斷開(kāi)并重新連接。 當(dāng)存在多個(gè)負(fù)載影響時(shí),在整個(gè)測(cè)試過(guò)程中,鄰接矩陣不變。 (36) 測(cè)試從啟用一級(jí)控制(內(nèi)部環(huán)路和下垂控制)和在不同節(jié)點(diǎn)連接兩個(gè)負(fù)載Z1和Z2開(kāi)始,觀察在沒(méi)有DMPC控制器的情況下,DG單元平均共享實(shí)際功率,如圖3所示,頻率偏離其標(biāo)稱值,在t=10 s時(shí),啟用提出控制器,因此頻率恢復(fù)到其標(biāo)稱值;真實(shí)功率被重新分配。一旦啟用控制器,將根據(jù)DG的運(yùn)行成本重新分配實(shí)際功率。在30 s時(shí),MG承受其總負(fù)載(Z3已連接)。最后,分別在t=50和t=70時(shí)斷開(kāi)負(fù)載Z3和Z2。如圖3所示,在所有負(fù)載擾動(dòng)期間,控制器呈現(xiàn)平滑響應(yīng),沒(méi)有大的超調(diào),兩個(gè)目標(biāo)的穩(wěn)定時(shí)間均低于3 s。 圖3 DG單元的頻率與實(shí)際功率 如圖4所示,所設(shè)計(jì)的DMPC控制器不會(huì)影響DAPI控制器的電壓恢復(fù)和歸一化無(wú)功功率的共享性能。電壓調(diào)節(jié)比無(wú)功功率分配更好。 圖4 DMPC控制響應(yīng) 在存在延遲的情況下,頻率恢復(fù)是受影響最大的變量。圖5分別說(shuō)明了小延時(shí)(τij=0.25 s)、中間延時(shí)(τij=0.5 s)和大延時(shí)(τij=1 s)情況下各DG的頻率。可以發(fā)現(xiàn),延遲越大,超調(diào)量和穩(wěn)定時(shí)間越大。然而,在提出控制器作用下,這兩個(gè)參數(shù)仍然很小,即使在τij=1 s的情況下,超調(diào)量可以忽略不計(jì)(小于0.3%),且穩(wěn)定時(shí)間低于10 s。 圖5 延遲下的頻率恢復(fù) 相同3個(gè)時(shí)間延遲的實(shí)際功率如圖6所示。據(jù)觀察,下降時(shí)間幾乎不受影響;即使在最壞的情況下(τij=1 s),下降時(shí)間也小于5 s。隨著時(shí)間延遲的增加,超調(diào)量略有增加,這在激活控制器時(shí)最為明顯。盡管如此,仍然可以忽略不計(jì)。根據(jù)這些結(jié)果,可以確定DMPC對(duì)預(yù)測(cè)范圍以上的通信延遲具有魯棒性,這是因?yàn)镸PC使用滾動(dòng)地平線特性,該特性使用來(lái)自相鄰DG的歷史信息也可確定適當(dāng)?shù)目刂菩蛄?提升相應(yīng)的抗干擾能力。 圖6 實(shí)際功率曲線 為了分析控制器在通信鏈路故障時(shí)的性能,進(jìn)行了以下測(cè)試。測(cè)試從兩個(gè)連接在不同節(jié)點(diǎn)(Z1和Z2)的負(fù)載開(kāi)始。在t=10 s時(shí),啟用控制器。DG1和DG2之間在t=30 s時(shí)強(qiáng)制發(fā)生通信故障,因此修改鄰接矩陣,如式(19)所示,并且控制算法通過(guò)僅使用接收到的信息計(jì)算式(9)和式(12)來(lái)自動(dòng)識(shí)別故障,Z3在t=50 s時(shí)連接,在t=70 s時(shí)斷開(kāi),最后,在t=90 s時(shí)恢復(fù)通信鏈路。 結(jié)果如圖7所示。據(jù)觀察,控制器性能并未受損,控制目標(biāo)得以實(shí)現(xiàn),因此,該控制策略對(duì)通信故障具有魯棒性。然而,瞬態(tài)響應(yīng)是不同的,其穩(wěn)定時(shí)間增加到近10 s。這是因?yàn)槭?37)的通信矩陣A是不完整的,并且控制目標(biāo)與來(lái)自相鄰DG的已知信息直接相關(guān)。 (37) 圖7 控制響應(yīng)結(jié)果 當(dāng)特定DG發(fā)生意外故障時(shí),該測(cè)試顯示控制器的響應(yīng)性能。測(cè)試開(kāi)始時(shí),兩個(gè)負(fù)載在t=0s(Z1和Z2)處連接,控制器啟用,在t=10 s時(shí),鄰接矩陣由式(18)表示。在t=30 s時(shí),停止使用DG2,即DG2與電氣系統(tǒng)和通信網(wǎng)絡(luò)斷開(kāi)。因此,如圖8(a)所示,修改鄰接矩陣,MG在DG1和DG3連接的情況下繼續(xù)運(yùn)行。接下來(lái),在t=50 s時(shí),連接總負(fù)載。在t=70 s時(shí),同步程序完成后,DG2重新連接到MG。最后,斷開(kāi)Z3。 圖8 情景四頻率與實(shí)際功率曲線 盡管DG2已從MG斷開(kāi),但它并未關(guān)閉。只有其輔助控制被禁用,但其一級(jí)控制繼續(xù)運(yùn)行。當(dāng)DG2斷開(kāi)或重新連接時(shí),鄰接矩陣將更新。因此,剩余的DG機(jī)組只與運(yùn)行機(jī)組一致。 頻率恢復(fù)如圖8所示,在整個(gè)試驗(yàn)過(guò)程中,運(yùn)行DG可充分恢復(fù)頻率,無(wú)超調(diào)或長(zhǎng)的穩(wěn)定時(shí)間。類似地,當(dāng)DG2斷開(kāi)時(shí),盡管兩個(gè)DG單元都增加了它們的功率,但DG1承擔(dān)了大部分負(fù)載,并且未超過(guò)其最大功率容量。因此,所設(shè)計(jì)的控制器具有即插即用功能,并且始終滿足DG的物理功率容量。 使用仿真研究對(duì)本文方法和文獻(xiàn)[14]的工作進(jìn)行了比較。文獻(xiàn)[14]的目標(biāo)是恢復(fù)頻率和電壓,同時(shí)確保比例功率共享。因此,它在不考慮發(fā)電成本的情況下共享實(shí)際電力。 這兩種控制策略都針對(duì)負(fù)載變化情景進(jìn)行了測(cè)試,它們的鄰接矩陣如式(38)所示。對(duì)于這兩個(gè)控制器,測(cè)試描述如下:打開(kāi)控制器,連接Z1和Z2,測(cè)試開(kāi)始。然后在t=20 s和t=40 s時(shí),分別連接和斷開(kāi)Z3。最后,在t=60 s時(shí),斷開(kāi)Z1。兩個(gè)方案的實(shí)際功率結(jié)果分別如圖9所示。相反,在評(píng)估式(6)中DG的實(shí)際功率時(shí)獲得的運(yùn)行成本與表4的系數(shù)之間的比較如圖9所示。可以觀察到,本文方案在整個(gè)試驗(yàn)期間具有較低的運(yùn)行成本。此外,兩種方法的頻率調(diào)節(jié)響應(yīng)如圖10所示,結(jié)果顯示兩種方法具有非常相似的響應(yīng),這是因?yàn)檫@兩種策略都尋求頻率調(diào)節(jié)目標(biāo),并將P-ω下垂模型作為約束條件。 圖9 兩個(gè)方案的實(shí)際功率曲線 圖10 兩種方法的頻率調(diào)節(jié)響應(yīng) 兩種技術(shù)的完整測(cè)試、節(jié)約和優(yōu)化時(shí)間的運(yùn)行成本如表5所示。成本節(jié)約的表達(dá)式為 (38) 表5 控制器的主要區(qū)別Table 5 Main differences of controllers 式(38)中:C1為本文方法的操作成本;C2為文獻(xiàn)[14]的操作成本。 為了解決快速頻率恢復(fù)和緩慢功率調(diào)度之間的時(shí)間尺度分離問(wèn)題,提出一種考慮優(yōu)化調(diào)度的微電網(wǎng)頻率恢復(fù)分布式預(yù)測(cè)控制策略。在4種測(cè)試情景下對(duì)控制器的動(dòng)態(tài)性能進(jìn)行實(shí)驗(yàn)評(píng)估,得出如下結(jié)論。 (1)該控制器在4種不同的情形下依舊能夠保證良好的控制性能,證明該方法控制器能夠有效處理通信鏈路問(wèn)題和DG的連接/斷開(kāi),對(duì)于通信鏈路故障具有較強(qiáng)的魯棒性。 (2)提出的方法對(duì)負(fù)載變化和通信問(wèn)題具有較強(qiáng)的魯棒性,并且保證了頻率快速回復(fù)。 (3)提出方法具有更低的操作成本,另外優(yōu)化時(shí)間也較短,且不需要額外傳感器,簡(jiǎn)化了應(yīng)用條件。3 實(shí)驗(yàn)裝置和結(jié)果
3.1 實(shí)驗(yàn)性MG配置

3.2 DMPC設(shè)計(jì)參數(shù)和測(cè)試情景

3.3 情景一:負(fù)荷變化

3.4 情景二:通信延遲


3.5 情景三:通信鏈路故障

3.6 情景四:即插即用
3.7 性能比較



4 結(jié)論
猜你喜歡
童話王國(guó)·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
河南電力(2021年5期)2021-05-29 02:10:00
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
電影(2018年12期)2018-12-23 02:18:48
特別健康(2018年2期)2018-06-29 06:13:42
領(lǐng)導(dǎo)決策信息(2017年10期)2017-05-17 04:49:02
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
核科學(xué)與工程(2015年4期)2015-09-26 11:59:03
俄羅斯問(wèn)題研究(2012年1期)2012-03-25 09:54:48
