復(fù)雜載荷下的核管路支架智能布置
2024-03-31 10:48:04孫宇翔陳麗龍波王艷蘋劉詩華賈坤
中國機(jī)械工程 2024年2期
孫宇翔 陳麗 龍波 王艷蘋 劉詩華 賈坤
摘要 :當(dāng)前,核電管路支架布置通過人工試算反復(fù)迭代來實(shí)現(xiàn),存在勞動強(qiáng)度大、設(shè)計(jì)周期長、成本高等缺點(diǎn)。借助管路有限元力學(xué)分析,提出一種基于粒子群 遺傳混合算法的三維空間核電管路支架智能布置方法。布置示例表明,所提方法可在管路的三維全局空間內(nèi)自動布置不同功能的多個(gè)支架,在滿足《壓水堆核島機(jī)械設(shè)備設(shè)計(jì)和建造規(guī)則》設(shè)計(jì)規(guī)范的同時(shí)減小了工作量。
關(guān)鍵詞 :核電管路;支架布置;智能布置;粒子群 遺傳混合算法
中圖分類號 :TM623.2
DOI:10.3969/j.issn.1004-132X.2024.02.016
開放科學(xué)(資源服務(wù))標(biāo)識碼(OSID):
Intelligent Layout for Pipeline Supports of Nuclear Power Plant under
Complex Load
SUN Yuxiang 1 CHEN Li 2 LONG Bo 2 WANG Yanping 2 LIU Shihua 2 JIA Kun 1
1.State Key Laboratory for Strength and Vibration of Mechanical Structures,Xian Jiaotong
University,Xian,710049
2.Center of Mechanics,China Nuclear Power Engineering Co.,Ltd.,Beijing,100840
Abstract : Nowadays, the arrangement of pipeline supports for nuclear power plants is achieved by iterative manual calculations, which had many drawbacks such as high labour intensity, long design cycles, and high costs. An intelligent layout method for three-dimensional nuclear power pipeline supports was proposed based on particle swarm optimization-genetic algorithm hybrid algorithm and finite element mechanics analysis. The examples of intelligent arrangement of pipeline supports for typical nuclear pipelines show that the proposed method may automatically arrange multiple supports of different types in the global space of the pipeline to meet the ?Design and Construction Rules for Mechanical Equipment of Nuclear Island of Nuclear Power Plants, ?and greatly reduce workload.
Key words : nuclear power pipeline; pipeline support arrangement; intelligent layout; particle swarm optimization-genetic algorithm hybrid ?algorithm
0 引言
支架作為固定、支撐及準(zhǔn)確定位核電管路的重要設(shè)施,是確保管路及其連接設(shè)備運(yùn)行安全穩(wěn)定的重要屏障。支架布置需保證管路在溫度、地震、自重等復(fù)雜條件下滿足力學(xué)性能要求 ?[1-3] 。隨著“華龍一號”商業(yè)運(yùn)營的不斷推廣,以往的參考設(shè)計(jì)難以滿足核電自主設(shè)計(jì)的需求。人工反復(fù)調(diào)整支架位置和功能的布置策略存在勞動強(qiáng)度大、設(shè)計(jì)周期長、成本高的缺點(diǎn),且性能難以達(dá)到最優(yōu)。因此,借助人工智能領(lǐng)域的最新成果來發(fā)展核電管路支架的自動布置方法是提高設(shè)計(jì)效率和經(jīng)濟(jì)性的有效途徑,并對提高核電自主設(shè)計(jì)能力和技術(shù)創(chuàng)新具有重要作用。
近年來,國內(nèi)外學(xué)者在非核級管路支架的智能布局優(yōu)化方面取得了一定成果。為減少流動和振動載荷產(chǎn)生的過高應(yīng)力導(dǎo)致的管路故障、破壞及壽命損失,粒子群算法、遺傳算法、灰狼算法等智能方法 ?[4-5] 被用于管路支架的優(yōu)化,以實(shí)現(xiàn)對管路基頻、振動響應(yīng)等目標(biāo)的控制。采用偽密度變量技術(shù)可將支架布局問題轉(zhuǎn)化為以固有頻率最大為目標(biāo)的連續(xù)體拓?fù)鋬?yōu)化問題 ?[6-9] 。LIU等 ?[10] 針對航空發(fā)動機(jī)管路布局與支架排布的耦合問題, 提出一種管路布局和支架排布的集成優(yōu)化方法,引入Levy飛行策略對MOALO(multiobjective ant lion optimizer)算法進(jìn)行改進(jìn),在保證管路和支架之間裝配約束的前提下, 實(shí)現(xiàn)了管路支架系統(tǒng)的總體布局優(yōu)化。GAO等 ?[11] 為減小振動對管路系統(tǒng)的影響,通過神經(jīng)網(wǎng)絡(luò)建立優(yōu)化輸入與輸出關(guān)系的代理模型,利用遺傳算法對支架位置進(jìn)行優(yōu)化。
核級管路設(shè)計(jì)需考慮高溫、高壓、自重、沖擊和地震等極端工況,因此非核級管路支架智能布置的研究成果難以直接應(yīng)用。已有研究多著眼于核級管路的自動化排布 ??[12-13] ,僅有少數(shù)學(xué)者考慮力學(xué)性能對核管路支架位置進(jìn)行優(yōu)化。姜圣翰等 ?[14] 先對管路進(jìn)行預(yù)處理,再使用支持向量機(jī)進(jìn)行合格節(jié)點(diǎn)分類,最后使用窮舉法、云計(jì)算找出支架的最優(yōu)排布。該方法充分利用了云計(jì)算的計(jì)算效能,但不具備智能化設(shè)計(jì)特征,且前處理階段較為復(fù)雜、智能化程度較低、專業(yè)知識門檻較高,通用性不足。白曉明等 ?[15] 在總結(jié)人工試算方法的基礎(chǔ)上,開發(fā)了基于遺傳算法的核級管路優(yōu)化布置方法,即將管路上支架的局部位置和功能作為優(yōu)化變量,以多種工況下管路的最大應(yīng)力與許用應(yīng)力之比作為優(yōu)化目標(biāo),使用遺傳算法尋找支架的優(yōu)化布置方案。該方法對支架可布置范圍進(jìn)行了限定,單個(gè)支架只能在某段管路上移動,無法實(shí)現(xiàn)三維管路的全局尋優(yōu)。此外,該方法僅約束了管道的最大應(yīng)力與許用應(yīng)力之比,未考慮《壓水堆核島機(jī)械設(shè)備設(shè)計(jì)和建造規(guī)則》對閥門加速度的要求,無法直接用于復(fù)雜載荷下三維空間管路支架位置的工程設(shè)計(jì)。
為滿足工程設(shè)計(jì)需求,本文提出一種復(fù)雜載荷下三維空間核管路支架的智能布置方法,以管路的有限元力學(xué)分析為基礎(chǔ),利用粒子群 遺傳(particle swarm optimization-genetic algorithm, PSO-GA)混合算法在整條管路對應(yīng)的空間坐標(biāo)中選擇每個(gè)支架的最優(yōu)位置,解決遺傳算法收斂慢的問題。該方法依據(jù)《壓水堆核島機(jī)械設(shè)備設(shè)計(jì)和建造規(guī)則》(RCC-M),以設(shè)計(jì)工況、正常工況、異常工況、事故工況下的管路最大應(yīng)力與許用應(yīng)力之比總和最小為優(yōu)化目標(biāo),同時(shí)施加力學(xué)約束條件(4種工況下的最大應(yīng)力與許用應(yīng)力之比均小于1,地震荷載SL-1、SL-2作用下的閥門加速度分別小于4.8 ?g 和6.0 ?g ),通過PSO-GA混合算法自動迭代獲取最優(yōu)的管路支架布置方案。
1 核級管路支架布置的要求
1.1 支架布置規(guī)則
管路支架根據(jù)約束自由度的多少可分為滑動支架、導(dǎo)向支架、固定支架;根據(jù)反作用力形式可分為彈簧支架、剛性支架、恒力支架。滑動支架僅約束管路的徑向位移,而允許管路沿軸向移動,主要用于限制管路重力方向移動產(chǎn)生的脫節(jié)。導(dǎo)向支架牽引管路沿特定方向移動,避免偏離指定方向。限位支架限制管路從某個(gè)方向或幾個(gè)方向的線位移或角位移。彈簧支架允許管路自由移動,并能有效承載管路負(fù)荷、應(yīng)對熱膨脹。剛性支架將荷載傳遞到主體結(jié)構(gòu)。 恒力支架是管路產(chǎn)生熱位移較大時(shí)采用的一種支架。
支架位置、形式和數(shù)量的選取直接影響管路的應(yīng)力分布。支架位置選取的傳統(tǒng)方法主要根據(jù)設(shè)計(jì)準(zhǔn)則及經(jīng)驗(yàn)控制支架間距,避免管路因復(fù)雜荷載產(chǎn)生過大的應(yīng)力,水平方向的管路支架設(shè)置尤其要避免彎曲產(chǎn)生過大的正應(yīng)力、剪應(yīng)力和撓度。從工程角度出發(fā),在滿足設(shè)計(jì)要求的前提下,應(yīng)采用安裝簡單、成本較低的支架,并盡量減少支架的種類和數(shù)目。
1.2 復(fù)雜載荷下的應(yīng)力準(zhǔn)則
核管路的安全性評價(jià)一般通過管路的應(yīng)力分析與計(jì)算來實(shí)現(xiàn)。核管路的支架首先應(yīng)能承受管路及在線設(shè)備的靜荷載(包括壓力、自重和熱膨脹載荷),保證管路自身應(yīng)力小于許用值。某型核管路系統(tǒng)工作時(shí),管路內(nèi)流體的溫度超過300℃ ?[16] ,因此支吊架布置需考慮管路的熱脹冷縮問題,以免管路膨脹后的熱應(yīng)力導(dǎo)致管路應(yīng)力超出材料的許用極限。其次,還需考慮動荷載和偶然荷載的作用,保證管路在地震作用下的應(yīng)力不超過許用極限,仍能夠正常發(fā)揮作用。
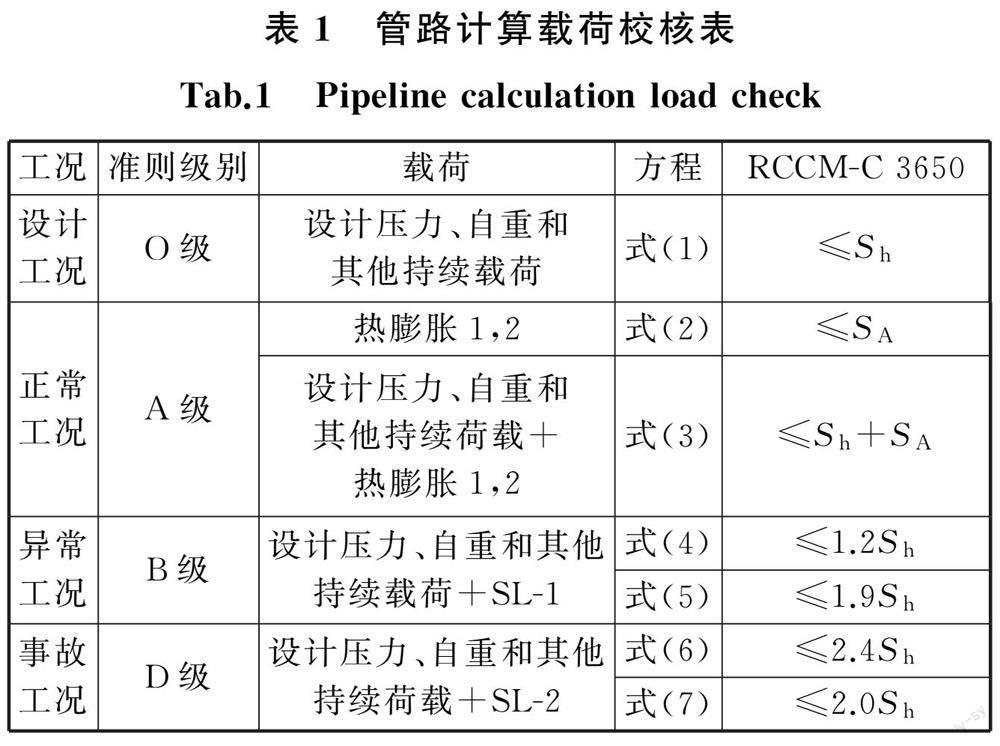
合格的管路支架布置應(yīng)使整個(gè)管路系統(tǒng)的應(yīng)力滿足相應(yīng)規(guī)范的要求,通常要保證核管路在設(shè)計(jì)工況(壓力、自重和持續(xù)載荷),正常工況(壓力、自重、持續(xù)載荷和熱膨脹),異常工況(壓力、自重、持續(xù)載荷和運(yùn)行基準(zhǔn)地震載荷),以及事故工況(壓力、自重、持續(xù)載荷和安全停堆地震載荷)下都滿足相應(yīng)的評定準(zhǔn)則。因此,本文采用RCC-M設(shè)計(jì)規(guī)范中不同工況下的核管路許用應(yīng)力及計(jì)算方法 ?[17] 。表1中,正常工況下,熱膨脹1的載荷為溫度80 ℃、壓力0.2 MPa,熱膨脹2的載荷為溫度40 ℃、壓力0.2 MPa;異常和事故工況下運(yùn)行基準(zhǔn)地震載荷SL-1、安全停堆地震載荷SL-2的地震譜分別如圖1所示。SL-1、SL-2地震譜引起的荷載施加在管路1.25 m高位置,阻尼比設(shè)置 為3%。
(1)O級準(zhǔn)則要求:管道中應(yīng)力滿足
S ??SL ?= pD ?o ?4t ?n ?+0.75i M ?A ?Z ≤S ?h ??(1)
式中,S ??SL ?為 O 級準(zhǔn)則應(yīng)力計(jì)算值;p為設(shè)計(jì)壓力;D ?o 為管道外徑;t ?n 為公稱壁厚;M ?A 為由重量和其他持續(xù)荷載引起的合力矩;Z為管道載面模量;i為應(yīng)力增強(qiáng)系數(shù);S ?h 為設(shè)計(jì)溫度下材料的基本許用應(yīng)力。
(2) A 級準(zhǔn)則要求:熱膨脹應(yīng)力超過 RCCM-C 3650 給定的許用變化范圍S ?A 時(shí),若不滿足
S ?E = iM ?c ?Z ≤S ?A ??(2)
式中,M ?c 為熱膨脹產(chǎn)生力矩的變化范圍;S ?E 為 A 級準(zhǔn)則的熱膨脹應(yīng)力計(jì)算值。
的要求,則可用下式
S ??TE ?= pD ?o ?4t ?n ?+ i Z (0.75M ?A +M ?c )≤S ?h +S ?A ?(3)
式中,S ??TE ?為 A 級準(zhǔn)則中考慮持續(xù)載荷和熱載荷的應(yīng)力計(jì)算值。
繼續(xù)校核,若式(3)得到滿足,則此工況熱膨脹應(yīng)力符合 RCC-M 設(shè)計(jì)規(guī)范要求。
(3) B ?級準(zhǔn)則要求:
S ??a,B ?= p ??max ?D ?o ?4t ?n ?+ 0.75i Z (M ?A +M ?B )≤1.2S ?h ??(4)
式中,p ??max ?為考慮工況下的最大壓力;M ?B 為偶然載荷產(chǎn)生的合力矩;S ??a,B ?為 B 級準(zhǔn)則中考慮持續(xù)載荷和偶然載荷的應(yīng)力計(jì)算值。
(4) D ?級準(zhǔn)則要求:
S ??a,D ?= p ??max ?D ?o ?4t ?n ?+ 0.75i Z (M ?A +M ?B )≤2.4S ?h ??(5)
如果 p ??max ?D 0 2t ?n ?≤S ?h ,則只需管路應(yīng)力滿足如下條件:
S′ ???a,D ?= 0.75i Z (M ?A +M ?B )≤1.9S ?h ??(6)
此外,在僅考慮內(nèi)部壓力時(shí),管路應(yīng)力應(yīng)滿足如下條件:
S″ ???a,D ?= p ??max ?D ?o ?2t ?n ?≤2S ?h ??(7)
式中,S ??a,D ?為 D 級準(zhǔn)則中考慮持續(xù)載荷和偶然載荷的應(yīng)力計(jì)算值;S′ ???a,D ?為 D 級準(zhǔn)則中不考慮內(nèi)壓、僅考慮其他持續(xù)載荷和偶然載荷下計(jì)算所得應(yīng)力;S″ ???a,D ?為 D 級準(zhǔn)則中僅考慮內(nèi)壓時(shí)計(jì)算所得的應(yīng)力。
除此之外,特殊管路還需要考慮管路閥門的加速度、接口復(fù)雜載荷等情況。
2 基于 PSO-GA 混合算法的支架智能 布置
在載荷環(huán)境、管路布置及支架種類數(shù)目確定的情況下,支架位置是決定管路應(yīng)力的唯一因素。管路構(gòu)型復(fù)雜,無法建立最大應(yīng)力的解析表達(dá)式,也難以得到支架位置與管路應(yīng)力間關(guān)系的代理模型。為此,本文以有限元管路應(yīng)力分析為基礎(chǔ),通過PSO-GA混合算法對隨機(jī)生成的初始支架位置進(jìn)行優(yōu)化。PSO-GA混合算法將遺傳算法的種群多樣性、全局隨機(jī)搜索能力與粒子群算法的個(gè)體記憶、收斂快等特性相結(jié)合,可有效提高迭代速率,增強(qiáng)尋優(yōu)能力,從而克服遺傳算法收斂慢的缺點(diǎn)。對于管路支架優(yōu)化,PSO-GA混合算法通過粒子群算法生成當(dāng)代最優(yōu)個(gè)體(當(dāng)代最優(yōu)的支架布置信息),并使用遺傳算法對個(gè)體種群(支架布置信息集)進(jìn)行交叉、變異、精英種群選取,反復(fù)迭代得到最優(yōu)解(最優(yōu)的支架布置信息),并保證管路最大應(yīng)力與許用應(yīng)力之比、閥門加速度滿足RCC-M準(zhǔn)則。
優(yōu)化目標(biāo)設(shè)計(jì)為管路系統(tǒng)4種工況下的最大應(yīng)力與許用應(yīng)力之比的總和最小。設(shè)置約束條件:地震荷載SL-1、SL-2作用下的閥門加速度分別小于4.8 ?g 和6.0 ?g ;4種工況的最大應(yīng)力與許用應(yīng)力之比均小于1。優(yōu)化數(shù)學(xué)模型為
min ( S ??SL ??S ?h ?+ max ( S ?E ?S ?A ?, S ??TE ??S ?h +S ?A ?)+ S ??a,B ??S ?h ?+
max ( S ??a,D ??2.4S ?h ?, S′ ???a,D ??1.9S ?h ?, S″ ???a,D ??2S ?h ?))
s.t. ???S ??SL ??S ?h ?≤1
max ( S ?E ?S ?A ?, S ??TE ??S ?h +S ?A ?)≤1
S ??a,B ??S ?h ?≤1
max ( S ??a,D ??2.4S ?h ?, S′ ???a,D ??1.9S ?h ?, S″ ???a,D
2S ?h ?)≤1 ??(8)
基于 PSO-GA 混合算法的支架位置智能布置流程如圖2所示。以支架位置、種類為優(yōu)化變量,首先生成包含支架位置信息的粒子種群,使用 PIPESTRESS 軟件并基于梁單元對初始粒子種群個(gè)體構(gòu)建力學(xué)模型。根據(jù)約束條件、優(yōu)化目標(biāo),計(jì)算粒子個(gè)體的適應(yīng)度、極值,以及種群極值。根據(jù)個(gè)體極值與種群極值對粒子種群的速度、位置進(jìn)行更新,隨后對更新后粒子的個(gè)體適應(yīng)度、個(gè)體極值、種群極值進(jìn)行更新。 最后判斷是否滿足終止條件,若不滿足則將該種群作為父代種群進(jìn)行交叉、變異,得到子代種群,父代與子代種群合并通過精英種群策略篩選,最終得到關(guān)于支架位置信息的下一代粒子種群。反復(fù)迭代,直至某一支架位置布置的管路力學(xué)模型計(jì)算結(jié)果符合力學(xué)評定準(zhǔn)則或達(dá)到終止迭代次數(shù),輸出當(dāng)前支架的位置信息。
3 智能布置算例
針對圖3所示的核電站一回路典型管路,以本文方法對管路支架進(jìn)行智能布置。為展現(xiàn) PSO-GA混合算法的優(yōu)勢,對比分析了本文算法和非支配排序遺傳算法(NSGA) ??[15] 的布置效果。取A點(diǎn)為笛卡兒坐標(biāo)系原點(diǎn),管路中任意節(jié)點(diǎn)位置可用空間坐標(biāo)(x,y,z)表示。管路外徑 273.1 mm,壁厚9.27 mm,線密度60.31 kg/m,抗震等級為1F。閥門長度為600 mm,重心位于(400 mm,0,0),質(zhì)量為250 kg,抗震等級為1A。考慮的工況包括設(shè)計(jì)工況、正常工況、異常工況、事故工況。本文的智能布置方法不僅能保證管路在上述4種工況下滿足力學(xué)約束條件,還可使管路在上述4種工況下的最大應(yīng)力與許用應(yīng)力之比總和最小。
3.1 支架布置預(yù)處理
使用PIPESTRESS有限元軟件構(gòu)建管路模型,其中,TANG單元模擬直管,BRAD單元模擬彎管,VALV單元模擬閥門。考慮到管路總長36.98 m,為平衡計(jì)算效率與優(yōu)化效果,采取等間距0.1 m劃分節(jié)點(diǎn),并對節(jié)點(diǎn)位置進(jìn)行編號,以確定節(jié)點(diǎn)位置信息,管路節(jié)點(diǎn)編號見圖4。閥門僅考慮集中質(zhì)量并加載于管路節(jié)點(diǎn)上,管路支架布置在管路的節(jié)點(diǎn)位置。
閥門、三通管、彎管附近不布置支架。作為實(shí)例,共選用5個(gè)支架,其中,2個(gè)為只約束管路平動側(cè)向和豎向的 GL 支架,2個(gè)為約束Z向平動的 BV 支架,1個(gè)為固定約束的 CB 支架,支架剛度100 ?MN/m。
3.2 支架智能布置過程
3.2.1 初始粒子種群的產(chǎn)生
設(shè)置管路支架最大可調(diào)控的空間位置信息為控制變量的上限X ??ub ?,最小可調(diào)控的空間位置信息為控制變量的下限X ??lb ?,在上限與下限之間取任意的整數(shù)作為支架的落點(diǎn)位置X,則有X ??lb ?≤X≤X ??ub ?。設(shè)定種群的個(gè)體數(shù)量為50,隨機(jī)生成包含多個(gè)隨機(jī)初始支架位置信息的初始粒子種群。根據(jù)初始支架位置信息建立 PIPESTRESS 軟件的力學(xué)模型。
3.2.2 個(gè)體適應(yīng)度的產(chǎn)生
每種支架位置信息對應(yīng)4種工況下的最大應(yīng)力與許用應(yīng)力之比的總和。以最大應(yīng)力與許用應(yīng)力之比的總和的倒數(shù)作為 PSO-GA 混合算法中個(gè)體的適應(yīng)度F:
F=[ S ??SL ??S ?h ?+ max ( S ?E ?S ?A ?, S ??TE ??S ?h +S ?A ?)+ S ??a,B ??S ?h ?+ ?max ( S ??a,D ??2.4S ?h ?, S′ ???a,D ??1.9S ?h ?, S″ ???a,D ??2S ?h ?)] ?-1 ??(9)
若個(gè)體不滿足約束條件,則適應(yīng)度為0。
3.2.3 粒子種群位置與速度的更新
設(shè)置算法中最優(yōu)解(極值)為4種工況下最大應(yīng)力與許用應(yīng)力之比的總和最小,最大迭代次數(shù)G ??max ?為20。為達(dá)到所有粒子向最優(yōu)解靠攏的目的,位置、速度迭代公式為
v ?id =wv ?id +c 1r 1(P ?id -X ?id ) + c 2r 2(P ?ig -X ?id ) ?(10)
X ?i+1 =X i+v ?i+1
c 1=c ??1s ?+(c ??1e ?-c ??1s ?)G ??max ?/i
c 2=c ??2s ?+(c ??2e ?-c ??2s ?)G ??max ?/i
式中,v ?id 為第i次迭代第d個(gè)粒子的速度;w為慣性因子;c 1、c 2分別為個(gè)體學(xué)習(xí)因子和全局學(xué)習(xí)因子;r 1、r 2為0~1的隨機(jī)數(shù);P ?id 為第i次迭代后第d個(gè)粒子個(gè)體的最優(yōu)解位置;P ?ig 為第i次迭代后,全局最優(yōu)解的粒子位置;X ?i+1 、X i 分別為第i+1次迭代和第i次迭代的粒子位置;c ?1 s ?、c ?1 e ?分別為初始個(gè)體學(xué)習(xí)因子和最終個(gè)體學(xué)習(xí)因子,c ?1 s ?= 2.75, c ?1 e ?=1.25;c ?2 s ?、c ?2 e ?分別為初始社會學(xué)習(xí)因子和最終社會學(xué)習(xí)因子,c ?2 s ?=0.50, c ?2 e ?=2.25。
本文使用非對稱學(xué)習(xí)因子 ?[18] ,以使 PSO-GA 混合算法迭代前期的全局搜索能力強(qiáng),迭代后期的局部搜索能力變強(qiáng),慣性因子線性迭代公式為
w=w ?s -(w ?s -w ?e )(i/G ??max ?) 2 ?(11)
式中,w ?s 、w ?e 分別為初始權(quán)重和最終權(quán)重,w ?s =0.9, w ?e =0.4。
3.2.4 迭代尋優(yōu)
比較不同粒子個(gè)體的適應(yīng)度,將適應(yīng)度較高的個(gè)體作為精英粒子種群個(gè)體保留遺傳到下一代。粒子位置都是整數(shù),因此將粒子種群個(gè)體信息進(jìn)行二進(jìn)制編碼(圖5),通過交叉變異生成新的粒子種群個(gè)體,解碼后根據(jù)位置速度迭代公式更新粒子位置與速度,重復(fù)上述步驟直至滿足終止條件,輸出當(dāng)前結(jié)果。此外,考慮到算法中參數(shù)的設(shè)定值會直接影響算法的高效性與穩(wěn)定性,本文通過對交叉參數(shù)、變異算子進(jìn)行敏感性分析,發(fā)現(xiàn)交叉參數(shù)對優(yōu)化目標(biāo)影響最敏感。為此,重點(diǎn)調(diào)試交叉參數(shù)值,觀察不同參數(shù)值對優(yōu)化效果的影響,最終選擇優(yōu)化效果最佳的參數(shù)值:隨機(jī)片段交叉參數(shù)為0.7,隨機(jī)點(diǎn)位變異參數(shù)為0.3。
3.3 智能布置結(jié)果
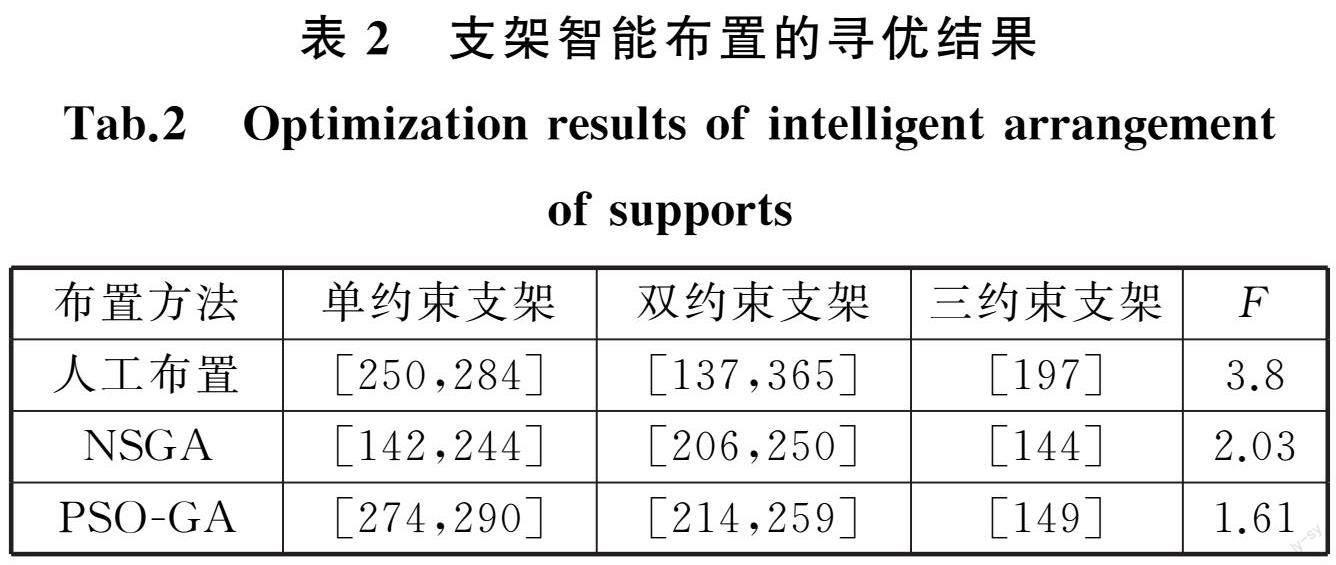
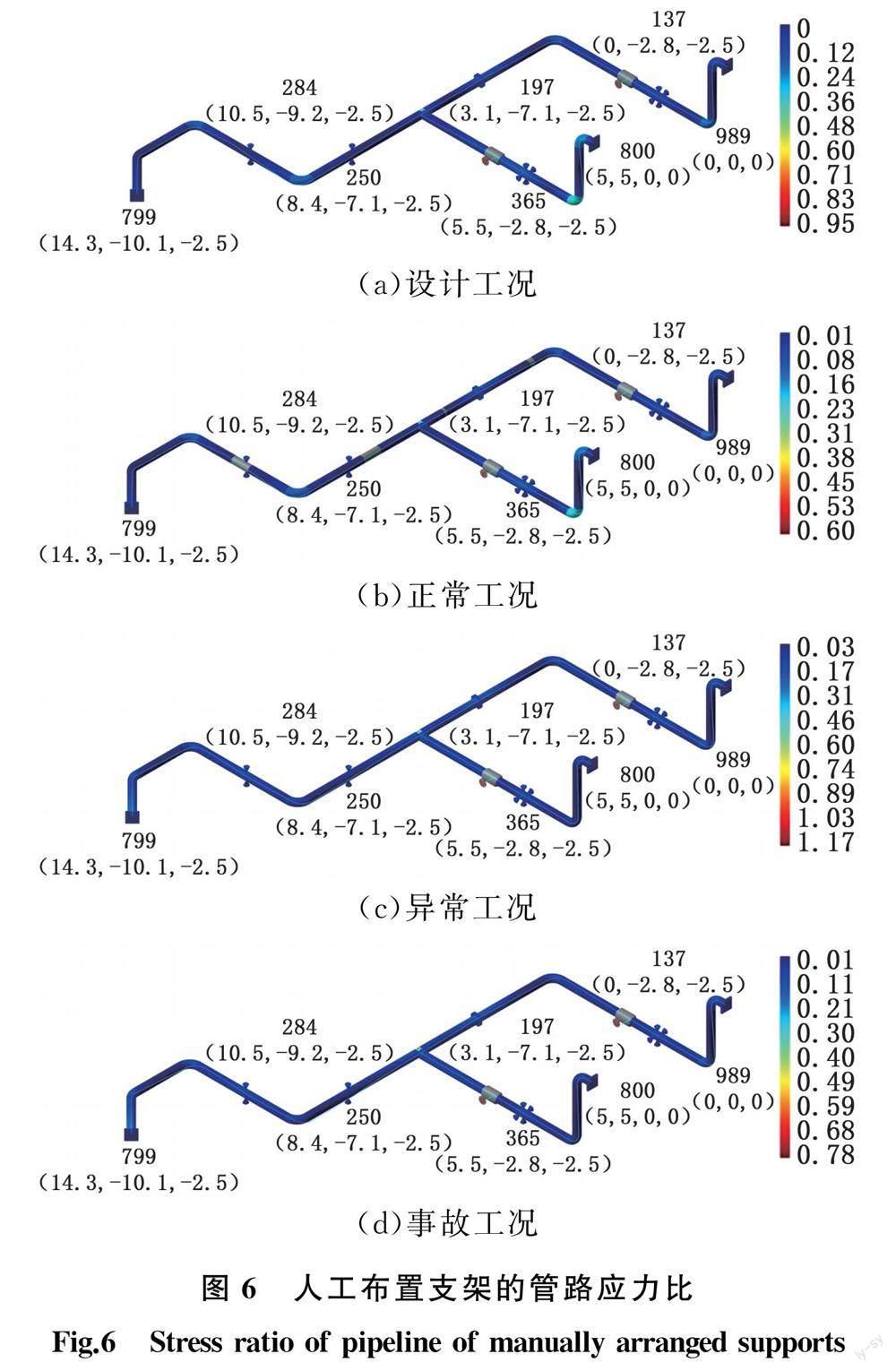
表2給出了人工布置、NSGA算法迭代20次、PSO-GA混合算法迭代20次后,4種工況下最大應(yīng)力與許用應(yīng)力之比的總和 F 最優(yōu)的支架 位置。圖6~圖8分別為人工布置、NSGA算法迭代20次、PSO-GA混合算法迭代20次后的應(yīng)力比云圖。由圖6可以看出,人工支架布置不滿足RCC-M設(shè)計(jì)規(guī)范,NSGA算法和PSO-GA混合算法皆能滿足RCC-M規(guī)范。
NSGA算法與PSO-GA混合算法不同迭代次數(shù)的最大應(yīng)力與許用應(yīng)力之比的總和見圖9。PSO-GA混合算法克服了NSGA算法前期收斂較慢的缺點(diǎn),具有更好的尋優(yōu)效果。如圖10所示,相較于手動調(diào)試、NSGA算法,PSO-GA混合算法的優(yōu)化效果更為顯著,更好滿足設(shè)計(jì)要求。正常工況下,PSO-GA混合算法的最大應(yīng)力與許用應(yīng)力之比僅為0.2,遠(yuǎn)低于RCC-M設(shè)計(jì)規(guī)范的許用值。
PSO-GA混合算法迭代20次后, 管路中2個(gè)閥門在地震荷載SL-1下的合加速度分別為1.32 ?g ?和2.02 ?g ,在地震荷載SL-2下的合加速度分別為1.92 ?g ?和 2.91 ?g ,滿足閥門加速度的約束條件。綜合考慮計(jì)算效率和優(yōu)化效果,將PSO-GA混合算法迭代20次的管路支架位置作為最優(yōu)支架布置方案,如圖11所示,其中,單約束支架位于274節(jié)點(diǎn)、290節(jié)點(diǎn),雙約束支架位于214節(jié)點(diǎn)、259節(jié)點(diǎn),三約束支架位于149節(jié)點(diǎn)。
4 結(jié)論
本文提出了一種基于PSO-GA混合算法的核電管路支架智能布置方法。算例表明該方法適用于復(fù)雜載荷下三維核管路的支架智能布置,能在管路對應(yīng)的全局空間內(nèi)通過支架位置迭代找到功能支架的最優(yōu)位置。所得支架布置下,管路4種工況的最大應(yīng)力與許用應(yīng)力之比的總和為 1.61。 同時(shí),4種工況下最大應(yīng)力與許用應(yīng)力之比均小于1,地震荷載SL-1下管路中兩個(gè)閥門的合加速度分別為1.32 ?g 和2.02 ?g ,地震荷載SL-2下管路中兩個(gè)閥門的合加速度分別為1.92 ?g 和 2.91 ?g ,遠(yuǎn)低于RCC-M規(guī)范中的許用值。本文提出的方法充分考慮了核電管路工程設(shè)計(jì)的實(shí)際要求,相比于傳統(tǒng)的手動調(diào)試,本文方法在滿足設(shè)計(jì)需求的同時(shí)極大減少了工作量。
參考文獻(xiàn) :
[1] ?王新軍,盧喜豐,艾紅雷,等.核級高能管道系統(tǒng)優(yōu)化分析[J].核動力工程,2014,35(4):114-118.
WANG Xinjun, LU Xifeng, AI Honglei, et al. Optimization Analysis of Nuclear Grade High Energy Pipeline System[J]. Nuclear Power Engineering, 2014,35(4):114-118.
[2] ?陳敏,張周紅.復(fù)雜管道應(yīng)力分析中的支吊架布置方法[J].壓力容器,2009,26(3):21-25.
CHEN Min, ZHANG Zhouhong. Arrangement Method of Support and Hanger in Stress Analysis of Complex Pipeline[J]. Pressure Vessel, 2009, 26(3):21-25.
[3] ?白曉明,鄭連綱,王新軍,等.基于遺傳算法的核級管道力學(xué)性能優(yōu)化研究[J].核動力工程,2017,38(S2):46-49.
BAI Xiaoming, ZHENG Liangang, WANG Xinjun,et al. Research on Mechanical Performance Optimization of Nuclear-level Pipeline Based on Genetic Algorithm[J]. Nuclear Power Engineering, 2017, 38(S2):46-49.
[4] ?MENDOZA ?F, BERNAL-AGUSTIN J L, DOMINGUEZ-NAVARRO J A. NSGA and SPEA Applied to Multi-objective Design of Power Distribution Systems[J]. IEEE Transactions on Power Systems, 2006, 21:1938-1945.
[5] ?GOLDBERG ?D E. Genetic Algorithm in Search, Optimization, and Machine Learning[M]. Hoboken:Addison Wesley Pub. Co., 1989.
[6] ?徐培原,劉偉.發(fā)動機(jī)外部管路系統(tǒng)的卡箍布局多目標(biāo)優(yōu)化[J].航空發(fā)動機(jī),2020,46(6):46-52.
XU Peiyuan, LIU Wei. Multi-objective Optimization of Clamp Layout of Engine External Piping System[J]. Aero Engine, 2020, 46(6):46-52.
[7] ?柳強(qiáng), 焦國帥. 基于Kriging模型和NSGA-Ⅱ的航空發(fā)動機(jī)管路卡箍布局優(yōu)化[J]. 智能系統(tǒng)學(xué)報(bào), 2019, 14(2):281-287.
LIU Qiang, JIAO Guoshuai. Layout Optimization of Aero-engine Piping Clamps Based on Kriging Model and NSGA-Ⅱ[J]. Journal of Intelligent Systems, 2019, 14(2):281-287.
[8] ?劉旭東, 孫偉. 多卡箍支撐的管路系統(tǒng)振動特性半析建模及支撐位置優(yōu)化[J]. 振動與沖擊, 2021, 40(9):32-40.
LIU Xudong, SUN Wei. Semi-analytical Modeling of Vibration Characteristics of Pipeline System Supported by Multiple Clamps and Optimization of Support Position[J]. Vibration and Shock, 2021, 40(19):32-40.
[9] ?趙紅飛,柳強(qiáng). 考慮裝配約束的航空發(fā)動機(jī)卡箍布局GWO優(yōu)化[J]. 遼寧石油化工大學(xué)學(xué)報(bào), 2022, 42(1):92-96.
ZHAO Hongfei, LIU Qiang. GWO Optimization of Aero-engine Clamp Layout Considering Assembly Constraints[J]. Journal of Liaoning Petrochemical University, 2022, 42(1):92-96.
[10] ?LIU ?Qiang, TANG Zhi, LIU Huijuan, et al. Integrated Optimization of Pipe Routing and Clamp Layout for Aeroengine Using Improved MOALO[J]. International Journal of Aerospace Engineering, 2021, 2021:6681322.
[11] ?GAO ?Peixin, LI Jinwu, ZHAI Jingyu, et al. A Novel Optimization Layout Method for Clamps in a Pipeline System[J]. Applied Sciences, 2020, 10(1):1-16.
[12] ?GONG ?Xiaocheng, JIN Xianjing, ZHANG Yu. Research and Application of Automatic Modeling Technology for Mechanical Analysis of Nuclear Power Pipelines Based on PepS[C]∥Proceedings of the 29th International Conference on Nuclear Engineering. Beijing, 2022:V012T12A013.
[13] ?ZHANG ?Jie, WU Liangjun, HU Jiakun, et al. Research and Application of Intelligent Layout Design Algorithm for 3D Pipeline of Nuclear Power Plant[J]. Mathematical Problems in Engineering, 2022, 2022:5198724.
[14] ?姜圣翰,范凱,王用超,等.云計(jì)算在核級管道應(yīng)力分析與優(yōu)化設(shè)計(jì)中的應(yīng)用研究[J].核動力工程, 2021, 42(S2):150-153.
JIANG Shenghan, FAN Kai, WANG Yongchao, et al. Application of Cloud Computing in Stress ?Analysis ?and Optimal Design of Nuclear Grade Pipelines[J]. Nuclear Power Engineering, 2021,42 (S2):150-153.
[15] ?白曉明,王新軍,張銳,等.智能優(yōu)化算法在華龍一號核級管道布置優(yōu)化中的應(yīng)用[J].核動力工程, 2019, 40(S1):41-44.
BAI Xiaoming, WANG Xinjun, ZHANG Rui, et al. Application of Intelligent Optimization Algorithm in Layout Optimization of Hua Long No.1 Nuclear Pipeline[J]. Nuclear Power Engineering, 2019, 40(S1):41-44.
[16] ?蒲小芬,王儉.秦山核電二期工程主管道的設(shè)計(jì)和安裝[J].核動力工程,2003(S1):185-187.
PU Xiaofen, WANG Jian. Design and Installation of the Main Pipeline of Qinshan Nuclear Power PhaseII Project[J]. Nuclear Power Engineering, 2003(S1) :185-187.
[17] ?AFCEN. ?Design and Construction Rules for Mechanical Components of PWR Nuclear Islands, RCC-M Section I:Subsection C-2002[S]. Shanghai:Shanghai Scientific and Technological Literature Press, 2010:149-151.
[18] ?毛開富,包廣清,徐馳.基于非對稱學(xué)習(xí)因子調(diào)節(jié)的粒子群優(yōu)化算法[J].計(jì)算機(jī)工程,2010,36(19):182-184.
MAO Kaifu, BAO Guangqing, XU Chi. Particle Swarm Optimization Algorithm Based on Asymmetric Learning Factor Adjustment[J]. Computer Engineering, 2010,36 (19):182-184.
( 編輯 張 洋 )
作者簡介 :
孫宇翔 ,男,2000年生,博士研究生。研究方向?yàn)楣苈分悄軆?yōu)化。E-mail:yuxiangsun@stu.xjtu.edu.cn。
賈 坤 (通信作者),男,1986年生,副教授、博士研究生導(dǎo)師。研究方向?yàn)楹斯こ塘W(xué)。發(fā)表論文30余篇。E-mail:kunjia@mail.xjtu.edu.cn.
