基于NLMS和Autoformer的滾動軸承RUL預(yù)測
2024-03-25 02:05:08劉康寧徐遵義閆春相
計算機(jī)技術(shù)與發(fā)展 2024年3期
劉康寧,徐遵義,李 晨,閆春相
(山東建筑大學(xué) 計算機(jī)科學(xué)與技術(shù)學(xué)院,山東 濟(jì)南 250101)
0 引 言
滾動軸承是建筑機(jī)械設(shè)備中應(yīng)用非常廣泛的關(guān)鍵零部件。由于建筑機(jī)械設(shè)備運(yùn)行條件惡劣,滾動軸承較易發(fā)生故障。軸承故障輕則造成經(jīng)濟(jì)損失,重則危及生產(chǎn)安全[1]。準(zhǔn)確預(yù)測滾動軸承剩余使用壽命(Remaining Useful Life,RUL)對維護(hù)設(shè)備穩(wěn)定運(yùn)行、保障生產(chǎn)安全具有重要的現(xiàn)實(shí)需求和應(yīng)用價值。
隨著傳感器技術(shù)與信號處理技術(shù)的發(fā)展,根據(jù)大量歷史傳感器數(shù)據(jù)對滾動軸承退化信息進(jìn)行建模的數(shù)據(jù)驅(qū)動方法,尤其是深度學(xué)習(xí)方法,已成為滾動軸承RUL預(yù)測主流發(fā)展方向[2]。根據(jù)深度學(xué)習(xí)模型結(jié)構(gòu)可分為基于循環(huán)神經(jīng)網(wǎng)絡(luò)(Recurrent Neural Networks,RNNs)模型的RUL預(yù)測方法和基于Transformers長序列預(yù)測模型的RUL預(yù)測方法。RNNs模型雖已在滾動軸承RUL預(yù)測領(lǐng)域取得較好效果[3-4],但囿于模型結(jié)構(gòu),此類模型難以建模長距離依賴關(guān)系,無法充分利用長輸入序列中隱含的退化特征;同時,RNNs模型的串行計算方式嚴(yán)重制約了模型運(yùn)行速度[5]。Transformer模型采用自注意力機(jī)制(Self-attention Mechanism)捕捉輸入序列中任意向量之間的依賴關(guān)系,在解決RNNs模型的長距離依賴問題的同時實(shí)現(xiàn)了并行計算[6]。周哲韜等提出基于Transformer模型的滾動軸承RUL預(yù)測方法,較好地提升了預(yù)測準(zhǔn)確率[7]。Zhou等對Transformer模型的自注意力機(jī)制與解碼方式進(jìn)行改進(jìn),提出了Informer模型[8]。李廣福等使用Informer模型挖掘出退化指標(biāo)與滾動軸承退化趨勢的復(fù)雜映射關(guān)系,通過實(shí)驗(yàn)證明了該方法相對GRU(Gated Recurrent Unit),LSTM(Long Short-Term Memory)等RNNs模型方法的先進(jìn)性[9]。然而,Transformer,Informer等模型中的自注意力機(jī)制難以從復(fù)雜長時間序列中分解出可靠的時序依賴,且此類逐點(diǎn)聚合特征的方式會造成信息利用瓶頸。
Autoformer模型是對Transformer,Informer等模型的有效改進(jìn):提出一種序列分解模塊(Series Decomposition Block),可從復(fù)雜時間模式中漸進(jìn)地分解出趨勢項(xiàng)(trend-cyclical)與周期項(xiàng)(seasonal);提出一種自相關(guān)機(jī)制(Auto-Correlation Mechanism)代替自注意力機(jī)制,使用序列級連接聚合周期依賴項(xiàng)(Period-based dependencies),打破信息利用瓶頸的同時實(shí)現(xiàn)了O(LlogL)復(fù)雜度[10]。
鑒于振動信號具有對軸承狀態(tài)變化響應(yīng)迅速、容易提取等優(yōu)點(diǎn),該文采用振動信號進(jìn)行滾動軸承RUL預(yù)測。在實(shí)際生產(chǎn)環(huán)境中,采集到的振動信號往往具有非線性、非平穩(wěn)和低信噪比等問題,因此需對其進(jìn)行降噪處理。自適應(yīng)濾波器使用自適應(yīng)算法根據(jù)輸入信號的時變統(tǒng)計特性自動調(diào)整數(shù)字濾波器權(quán)重,其參數(shù)設(shè)置受人為因素影響小,魯棒性佳[11];相對于LMS(Least Mean Square)自適應(yīng)算法,NLMS(Normalized Least Mean Square)自適應(yīng)算法收斂速度更快、同時可避免長輸入信號下的噪聲梯度放大問題,更為適合對滾動軸承振動信號進(jìn)行降噪。
該文將Autoformer模型引入滾動軸承RUL預(yù)測領(lǐng)域,提出一種基于NLMS自適應(yīng)濾波器和Autoformer長序列預(yù)測模型的滾動軸承RUL預(yù)測方法。使用NLMS自適應(yīng)濾波器對采集到的滾動軸承原始振動信號進(jìn)行降噪,從降噪振動信號中分段提取時域特征,采用Spearman相關(guān)系數(shù)篩選出對滾動軸承RUL預(yù)測貢獻(xiàn)較大且獨(dú)立性較強(qiáng)的特征列,經(jīng)歸一化后形成多維特征集;利用Autoformer模型中序列分解模塊與自相關(guān)機(jī)制建立多維特征集與滾動軸承RUL之間的分段非線性映射,實(shí)現(xiàn)滾動軸承RUL預(yù)測。
1 相關(guān)理論
1.1 NLMS自適應(yīng)濾波器
NLMS自適應(yīng)濾波器主要由參數(shù)可調(diào)數(shù)字濾波器與NLMS自適應(yīng)算法組成[11],其結(jié)構(gòu)如圖1所示。

圖1 NLMS自適應(yīng)濾波器結(jié)構(gòu)
NLMS自適應(yīng)濾波器工作流程為:
(1)初始化濾波器權(quán)重w(0)、階數(shù)L、步長因子μ與修正因子σ,確定輸入信號x(n)、期望信號d(n);
(2)將x(n)輸入濾波器,得到輸出信號y(n);
(3)將d(n)與y(n)作差,得到噪聲信號e(n);
(4)NLMS自適應(yīng)算法使用x(n)的歐氏范數(shù)的平方對w(n)更新量進(jìn)行歸一化,以梯度下降的方式更新w(n),計算方法如式1所示。
(1)
其中,μ用于控制算法收斂速度;
(5)重復(fù)步驟2~步驟4至最大迭代次數(shù)或算法收斂,得到最優(yōu)濾波器權(quán)重。
1.2 Autoformer模型
Autoformer模型主要由編碼器、解碼器組成[12],模型架構(gòu)如圖2所示。
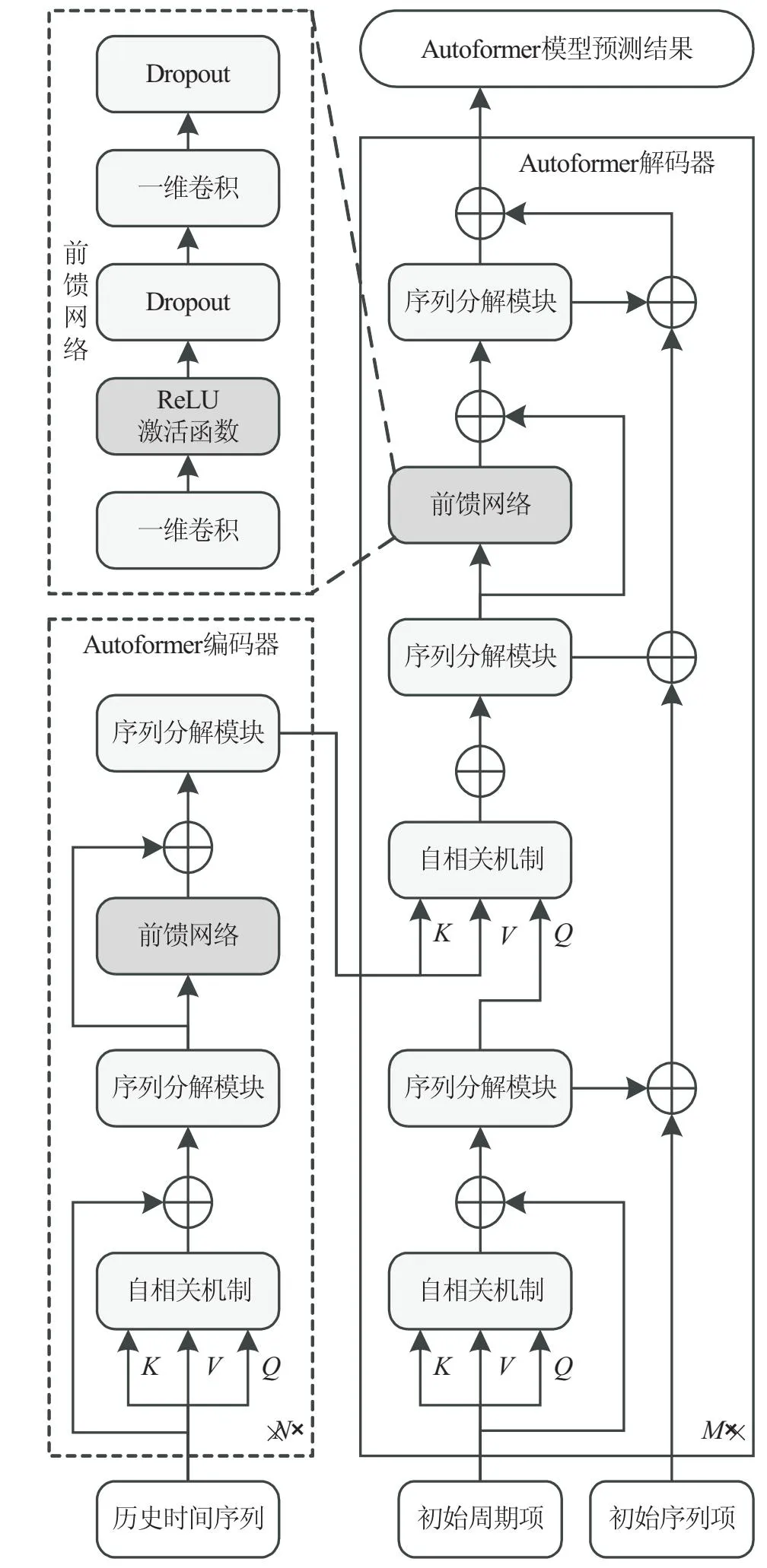
圖2 Autoformer模型架構(gòu)
每層編碼器與解碼器中堆疊序列分解模塊、自相關(guān)機(jī)制、前饋網(wǎng)絡(luò)(主體為一維卷積)。編碼器的輸入為歷史時間序列,通過序列分解模塊逐步分離并輸出歷史周期性信息;解碼器的輸入為周期項(xiàng)與趨勢項(xiàng)信息,對趨勢項(xiàng)與周期項(xiàng)分別建模:對于周期項(xiàng),使用多頭自相關(guān)機(jī)制聚合周期依賴項(xiàng);對于趨勢項(xiàng),使用逐步累積方式從隱變量中提取趨勢信息;最終輸出模型預(yù)測結(jié)果。
1.2.1 序列分解模塊
Autoformer模型中的序列分解模塊用于從復(fù)雜時間模式中漸進(jìn)地分離出趨勢項(xiàng)與周期項(xiàng)。趨勢項(xiàng)與周期項(xiàng)計算方法如式2和式3所示。
χt=AvgPool(Padding(χ))
(2)
χs=χ-χt
(3)
其中,χ為時間序列中的待分解隱變量,χt與χs分別為趨勢項(xiàng)與周期項(xiàng);Padding()操作用于維持序列長度,AvgPool()操作用于平滑周期項(xiàng),從而突出趨勢項(xiàng)。
1.2.2 自相關(guān)機(jī)制
自相關(guān)機(jī)制基于序列周期性設(shè)計。多頭(multi-head)版本的自相關(guān)機(jī)制結(jié)構(gòu)如圖3所示。
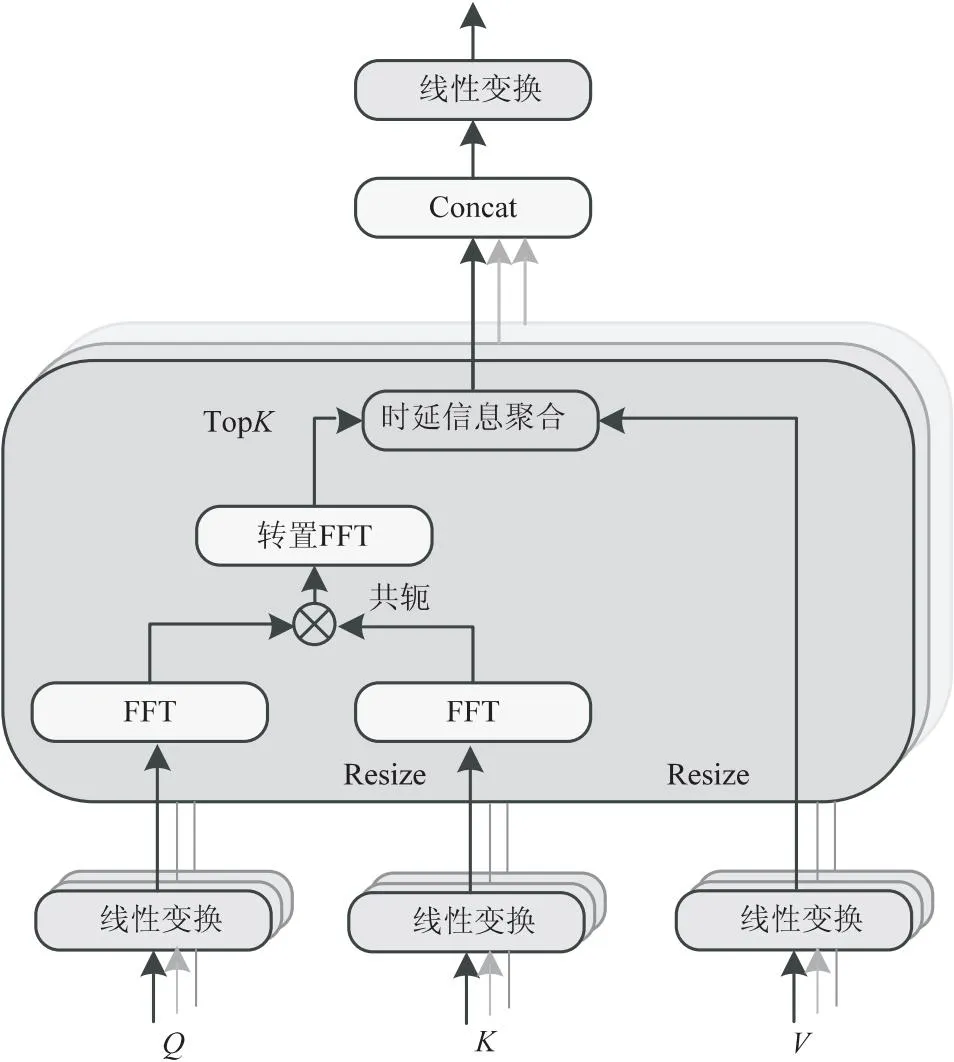
圖3 多頭自相關(guān)機(jī)制
基于隨機(jī)過程理論,通過計算原序列{χt}與τ滯后序列{χt-τ}的自相關(guān)系數(shù)Rχχ(τ)發(fā)現(xiàn)周期依賴項(xiàng)。基于Wiener-Khinchin理論,自相關(guān)系數(shù)Rχχ(τ)可通過快速傅里葉變換(Fast Fourier Transform,FFT)得到,Rχχ(τ)計算方法如式4~式5所示。
(4)

(5)
其中,τ為滯后項(xiàng),Sχχ(f)為信號的頻域表示,F與F-1分別表示FFT及其轉(zhuǎn)置運(yùn)算,F*表示F的共軛運(yùn)算。
使用TopK()操作取前k個使得自相關(guān)系數(shù)最高的周期長度,避免挑選到無關(guān)甚至相反相位;然后根據(jù)估計的周期長度使用Roll()操作進(jìn)行信息對齊,之后聚合不同周期下相似子序列的時延信息。時延信息聚合過程如式6~式8所示。
τ1,…,τk=argTopk(RQ,K(τ)),τ∈{1,2,…,L}
(6)

(7)
AutoCorrelation(Q,K,V)=
(8)
2 基于NLMS和Autoformer的滾動軸承RUL預(yù)測
基于NLMS自適應(yīng)濾波器和Autoformer模型的滾動軸承RUL預(yù)測流程如圖4所示。
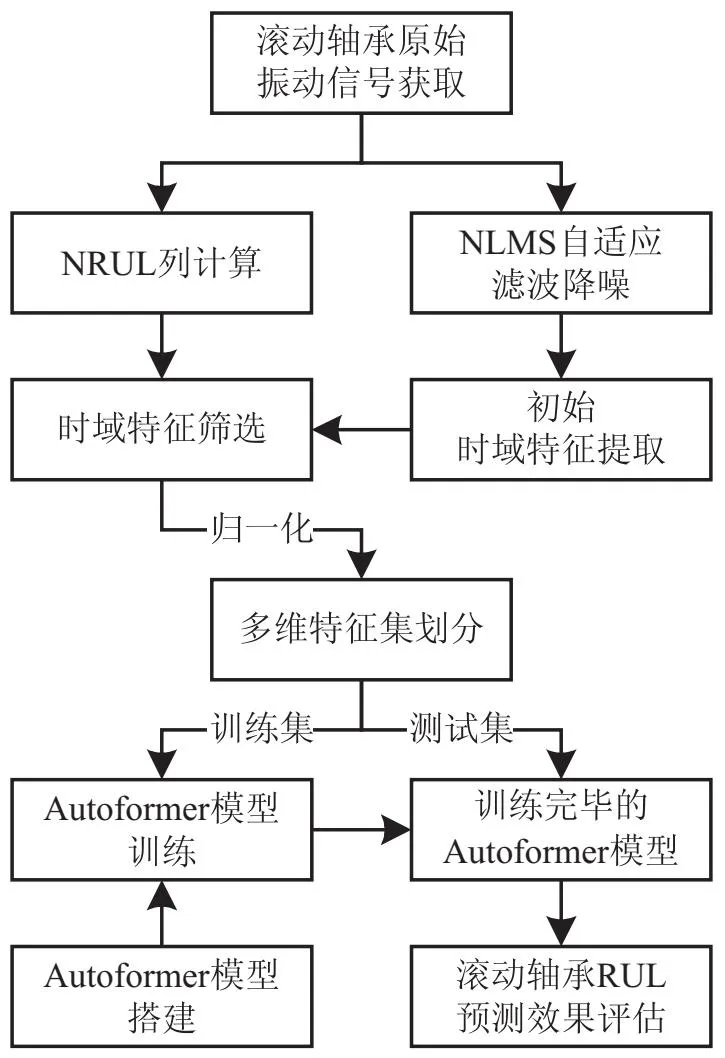
圖4 基于NLMS和Autoformer的滾動軸承RUL預(yù)測流程
具體流程為:
(1)數(shù)據(jù)準(zhǔn)備。
(a)獲取滾動軸承原始振動信號;
(b)根據(jù)滾動軸承原始振動信號各樣本段采樣時間構(gòu)建歸一化剩余使用壽命(Normalized Remaining Useful Life,NRUL)列作為數(shù)據(jù)集標(biāo)簽;
(2)數(shù)據(jù)預(yù)處理。
(a)數(shù)據(jù)降噪:使用NLMS自適應(yīng)濾波器對滾動軸承原始振動信號進(jìn)行降噪;
(b)特征提取:從降噪振動信號中分段提取常用時域特征;
(c)特征篩選:對各時域特征列結(jié)合NRUL列進(jìn)行Spearman相關(guān)性分析,篩選出對滾動軸承RUL預(yù)測貢獻(xiàn)較大且獨(dú)立性較強(qiáng)的特征列;
(d)數(shù)據(jù)集劃分:對選取的各時域特征列經(jīng)歸一化后形成多維特征集;將多維特征集按比例劃分為訓(xùn)練集與測試集;
(3)模型搭建與訓(xùn)練:初始化Autoformer模型超參數(shù);將訓(xùn)練集作為Autoformer模型的輸入,NRUL預(yù)測值作為模型的輸出,對Autoformer模型進(jìn)行訓(xùn)練;
(4)模型評估:將測試集輸入訓(xùn)練完畢的Autoformer模型,使用均方根誤差(Root Mean Squared Error,RMSE)、平均絕對誤差(Mean Absolute Error,MAE)兩個評價指標(biāo)對模型預(yù)測效果進(jìn)行評估。
3 實(shí)驗(yàn)驗(yàn)證與分析
該文采用FEMTO-ST研究所(法國貝桑松)提供的PHM 2012數(shù)據(jù)集進(jìn)行仿真實(shí)驗(yàn)。PHM 2012數(shù)據(jù)集由PRONOSTIA實(shí)驗(yàn)平臺通過多次加速軸承退化實(shí)驗(yàn)采集,實(shí)驗(yàn)平臺結(jié)構(gòu)如圖5所示[13]。
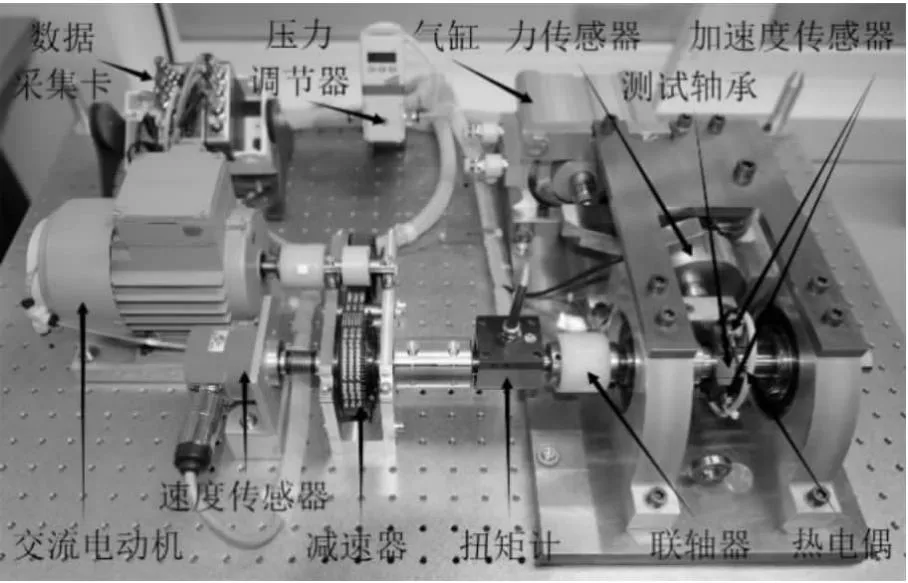
圖5 PRONOSTIA實(shí)驗(yàn)平臺
PHM2012數(shù)據(jù)集包含三種工況(徑向載荷力和轉(zhuǎn)速)下軸承振動數(shù)據(jù)與溫度數(shù)據(jù),其中徑向載荷力用于加速軸承退化過程,各工況參數(shù)設(shè)置如表1所示。
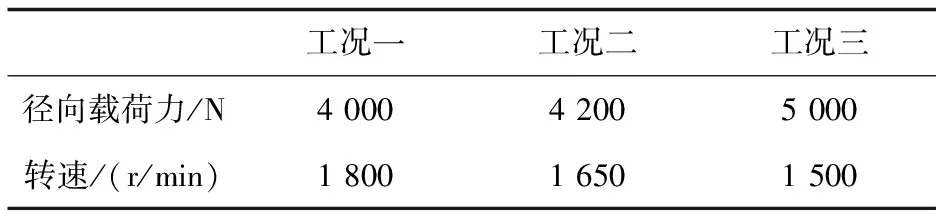
表1 PRONOSTIA實(shí)驗(yàn)平臺三種工況參數(shù)設(shè)置
振動信號由水平方向與垂直方向的兩個加速度傳感器進(jìn)行采集,采樣頻率為25.6 kHz,采樣間隔為10 s,一個采樣周期長度為0.1 s。當(dāng)振動信號水平振幅超20 g時認(rèn)為軸承失效,獲得軸承全壽命周期振動信號。該文取分屬三種工況的軸承1_1、軸承2_1及軸承3_1的全壽命周期振動信號作為研究對象。軸承1_1全壽命水平振幅如圖6所示。
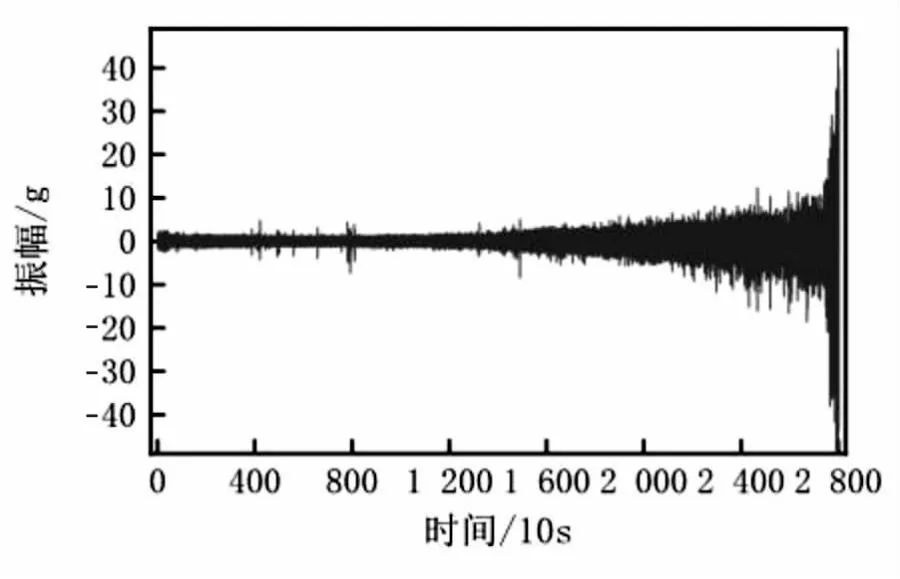
圖6 軸承1_1全壽命水平振動信號波形
由圖6可知,可按振動信號振幅變化將軸承1_1全壽命周期大致分為3個階段[14]。第1樣本段至第1 150樣本段為健康階段:此階段信號振幅基本保持平穩(wěn);第1 151樣本段至第2 710樣本段為退化階段:由于退化事件(如磨損、點(diǎn)蝕等)的發(fā)生,此階段信號振幅較前一階段逐漸增大;第2 711樣本段至第2 803樣本段為失效狀態(tài):由于退化事件進(jìn)一步發(fā)展,此階段信號出現(xiàn)跳變,信號振幅急劇增大,軸承失效。
不同類型、不同工況下的滾動軸承RUL衰減規(guī)律不盡相同。為保持模型的泛用性,該文構(gòu)建NRUL真實(shí)值列作為數(shù)據(jù)集標(biāo)簽。各樣本段對應(yīng)NRUL真實(shí)值計算公式如式9所示。
(9)
其中,STt表示第t樣本段采樣時間。可見對于軸承全壽命周期數(shù)據(jù),軸承初始狀態(tài)即ST1時對應(yīng)NRUL真實(shí)值為“1”,軸承退化至失效(Run-to-Failure,RTF)狀態(tài)即STn時對應(yīng)NRUL真實(shí)值為“0”;可較好地描述NRUL真實(shí)值隨時間衰減規(guī)律。
3.1 數(shù)據(jù)預(yù)處理
數(shù)據(jù)預(yù)處理的主要過程包括數(shù)據(jù)降噪、時域特征提取及篩選、數(shù)據(jù)歸一化等。
3.1.1 數(shù)據(jù)降噪
為抑制背景噪聲、凸顯退化信息,使用NLMS自適應(yīng)濾波器對滾動軸承原始振動信號進(jìn)行降噪。
期望信號的選擇對自適應(yīng)濾波器性能有較大影響,為引導(dǎo)滾動軸承原始振動信號向期望信號靠攏的同時保留更多關(guān)鍵信息,在以滾動軸承原始振動信號為輸入信號的前提下,該文選用經(jīng)滑動平均處理的輸入信號作為期望信號。采用的NLMS自適應(yīng)濾波器階數(shù)設(shè)置為32,步長因子設(shè)置為1e-4,修正因子設(shè)置為1e-3。軸承1_1第1樣本段水平振幅經(jīng)上述參數(shù)設(shè)置的NLMS自適應(yīng)濾波降噪前后對比如圖7所示。
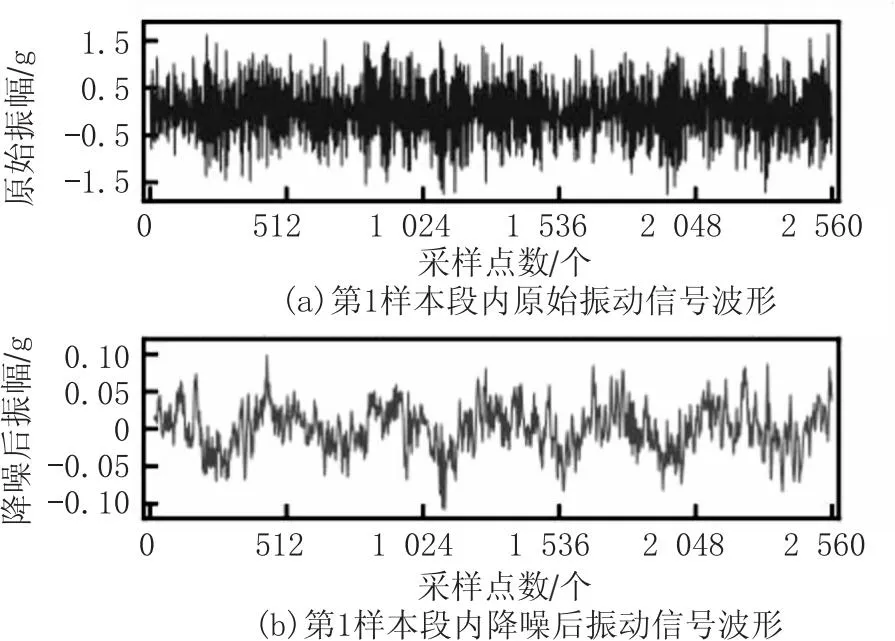
圖7 軸承1_1第1樣本段振動信號降噪前后波形對比
由圖7(a)、圖7(b)可知,經(jīng)NLMS自適應(yīng)濾波降噪后,高頻率與高幅值的噪聲組分被有效抑制,數(shù)據(jù)振蕩現(xiàn)象得到極大緩解,軸承振動信號變得更為集中與平滑;同時,原始振動信號的時變趨勢、跳變等有用信息得到較好保留。故NLMS自適應(yīng)濾波器可較好地對滾動軸承原始振動信號進(jìn)行降噪。
3.1.2 特征提取及篩選
分段聚合近似(Piecewise Aggregate Approximation,PAA)將序列均分成段,每個分段使用一個或多個特征值來表征,最終得到新的特征序列,可同時起到壓縮數(shù)據(jù)量與進(jìn)一步降噪的作用[15]。該文基于PAA的思想對滾動軸承振動信號進(jìn)行特征提取。
滾動軸承振動信號時域統(tǒng)計特征可解釋性強(qiáng)、易于提取且計算量小,多維時域特征可直觀、全面地反映軸承退化狀態(tài)[16]。為維持?jǐn)?shù)據(jù)量與預(yù)測效果的平衡,對分段長度為8的振動信號序列分別提取多維振動信號時域特征。參考文獻(xiàn)[17-18],該文選擇的初始時域特征如表2所示。
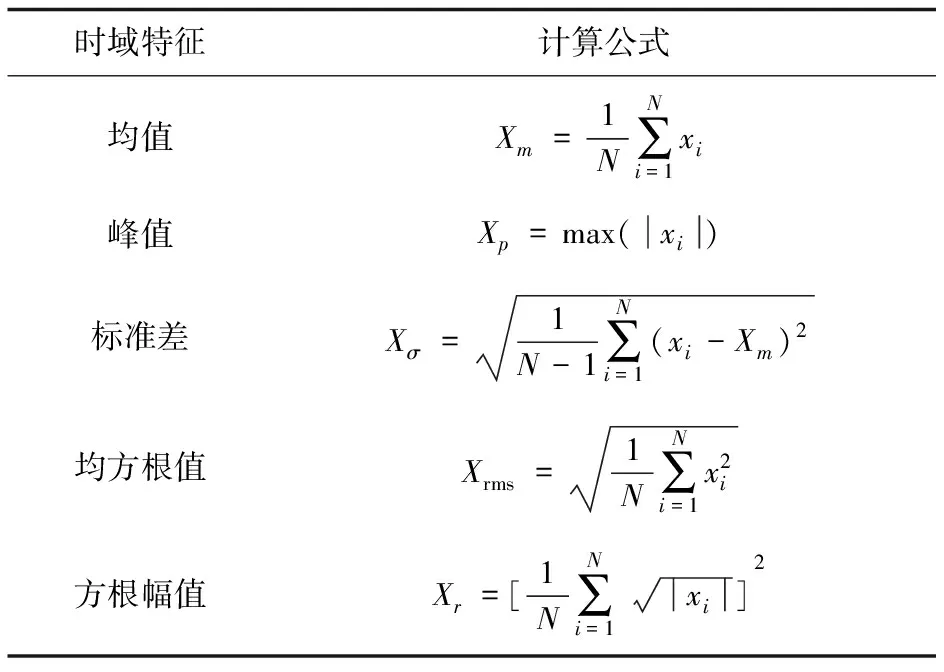
表2 初始時域特征
冗余特征不僅會增加計算量、降低模型運(yùn)行速度,還可能影響軸承RUL預(yù)測的準(zhǔn)確率。該文通過計算各特征列與NRUL真實(shí)值列之間的Spearman相關(guān)系數(shù)進(jìn)行特征篩選。
特征篩選過程中,保留與NRUL真實(shí)值列相關(guān)系數(shù)絕對值較大的特征列。同時,若特征列兩兩之間相關(guān)性較高,則僅保留兩者中與NRUL真實(shí)值列相關(guān)性更高的一列,刪除另外一列。最終選擇的對滾動軸承RUL預(yù)測貢獻(xiàn)較大且獨(dú)立性較強(qiáng)時域特征為:方根值、峰值、峭度值、脈沖因數(shù)、峭度因數(shù)。
將保留的各列時域特征分別進(jìn)行數(shù)據(jù)歸一化,形成多維特征集。按照3∶1的比例將多維特征集劃分為訓(xùn)練集與測試集。
3.2 模型訓(xùn)練與結(jié)果分析
該方法中Autoformer模型基于Pytorch 1.12.0框架實(shí)現(xiàn),使用CUDA 11.6在NVIDIA GeForce RTX 3090 GPU中進(jìn)行訓(xùn)練與測試。
將訓(xùn)練集輸入Autoformer模型進(jìn)行訓(xùn)練。采用的Autoformer模型由2層相同的編碼器與1層解碼器組成,模型維度為512;采用ADAM優(yōu)化算法自適應(yīng)調(diào)整學(xué)習(xí)率,初始學(xué)習(xí)率設(shè)為1e-4并隨機(jī)初始化權(quán)重矩陣,設(shè)定值為0.05的Dropout防止模型過擬合,采用均方誤差(Mean Squared Error,MSE)為損失函數(shù),選定GELU(Gaussian Error Linear Unit)為激活函數(shù)。
將測試集輸入訓(xùn)練完畢的Autoformer模型,根據(jù)輸出的滾動軸承NRUL預(yù)測值計算RMSE和MAE,對模型預(yù)測效果進(jìn)行評估。兩種評價指標(biāo)均可防止正負(fù)誤差相互抵消,且數(shù)值越小代表預(yù)測效果越好。兩種評價指標(biāo)計算如式10、式11所示。
(10)
(11)
其中,n為測試集樣本總數(shù)量,NRULT為滾動軸承NRUL真實(shí)值,NRULP為滾動軸承NRUL預(yù)測值。
文獻(xiàn)[7]、文獻(xiàn)[9]已分別證明Transformer模型、Informer模型相對GRU、LSTM、雙向LSTM等主流RNNs模型在滾動軸承RUL預(yù)測領(lǐng)域的先進(jìn)性。使用與Autoformer模型參數(shù)一致的Transformer模型、Informer模型與文中Autoformer模型建立對比實(shí)驗(yàn),以驗(yàn)證Autoformer模型在滾動軸承RUL預(yù)測領(lǐng)域的有效性與先進(jìn)性。上述三種模型預(yù)測效果如圖8所示。
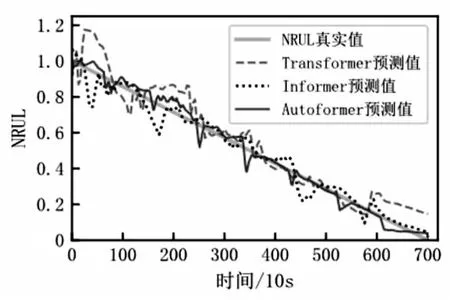
圖8 各模型預(yù)測效果
為便于觀察,圖中預(yù)測曲線經(jīng)窗口尺寸為8的滑動平均處理。由圖8可知,三條預(yù)測曲線整體呈現(xiàn)與NRUL真實(shí)值曲線相似的下降趨勢,表明Transformers模型在滾動軸承RUL預(yù)測領(lǐng)域具有巨大潛力;其中,Autoformer預(yù)測曲線最為貼近NRUL真實(shí)值曲線,且隨著預(yù)測長度的增加,該曲線起伏逐漸減小;同時,觀察到Autoformer預(yù)測曲線出現(xiàn)周期性尖銳跳變,而Transformer預(yù)測曲線與Informer預(yù)測曲線中此種現(xiàn)象不明顯,推測這是由于Autoformer模型捕獲到了軸承退化過程中的長周期性退化特征。證明了Autoformer模型相對其他Transformers模型在滾動軸承RUL預(yù)測領(lǐng)域的有效性與先進(jìn)性。
此外,為驗(yàn)證NLMS自適應(yīng)濾波器對降低預(yù)測誤差具有重要作用,使用未降噪方法與文中方法進(jìn)行對比。除在數(shù)據(jù)預(yù)處理階段未對原始振動信號使用NLMS自適應(yīng)濾波器進(jìn)行降噪外,所述未降噪方法其余流程與文中方法相同。
Transformer模型方法、Informer模型方法、未降噪方法與文中方法在三種工況測試集上的評價指標(biāo)值如表3所示。
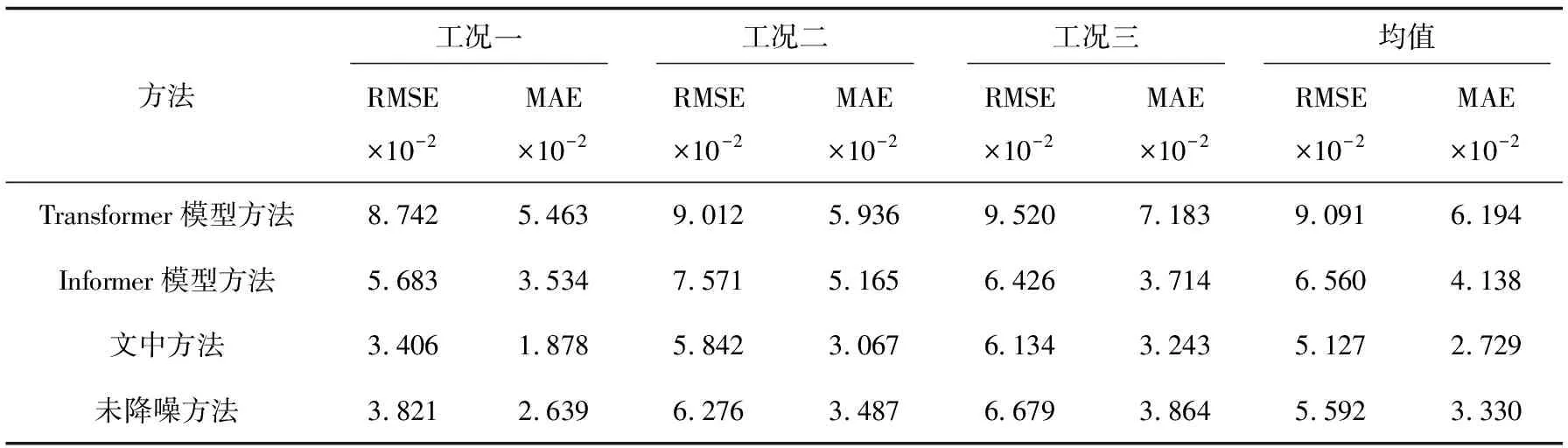
表3 PHM 2012數(shù)據(jù)集下各方法評價指標(biāo)值
由表3可知:
(1)在經(jīng)過相同的數(shù)據(jù)預(yù)處理后,與Transformer模型方法、Informer模型方法相比,文中方法預(yù)測誤差在RMSE均值方面分別降低了43.60%和21.84%,在MAE均值方面分別降低了55.94%和34.05%;在三種工況中均可取得最低預(yù)測誤差。進(jìn)一步證明了基于Autoformer模型的滾動軸承RUL預(yù)測方法的有效性、先進(jìn)性與泛化性。從模型設(shè)計思想分析:Transformer,Informer等模型的自注意力機(jī)制實(shí)現(xiàn)的是逐點(diǎn)特征聚合,此類離散方式未充分利用時間序列的連續(xù)性;而Autoformer模型的自相關(guān)機(jī)制實(shí)現(xiàn)的是高效的序列級連接,提升了信息利用率,更適用于滾動軸承RUL預(yù)測此類連續(xù)過程;從軸承退化機(jī)理分析:磨損是軸承退化的最主要形式,使得軸承振動信號振幅具有緩慢增大的趨勢性;磨損、剝離等軸承內(nèi)表面損傷通常會激起重復(fù)性的瞬態(tài)沖擊,使得振動信號相應(yīng)地表現(xiàn)出周期性瞬態(tài)脈沖;而Autoformer模型可很好地處理此類蘊(yùn)含趨勢性與周期性的長時序數(shù)據(jù)。
(2)在使用相同參數(shù)設(shè)置的Autoformer模型作為預(yù)測模型的情況下,與未降噪方法相比,文中方法預(yù)測誤差在RMSE均值和MAE均值方面分別降低了8.32%和18.05%。可見NLMS自適應(yīng)濾波器濾除了原始振動信號中混雜的大量噪聲,避免了預(yù)測模型學(xué)習(xí)到無關(guān)甚至有害特征,從而降低了滾動軸承RUL預(yù)測誤差。
為驗(yàn)證文中方法相對已有方法的先進(jìn)性,將其與文獻(xiàn)[9,19-20]所提方法在軸承1_1振動數(shù)據(jù)上的RUL預(yù)測評價指標(biāo)值進(jìn)行對比,如表4所示。
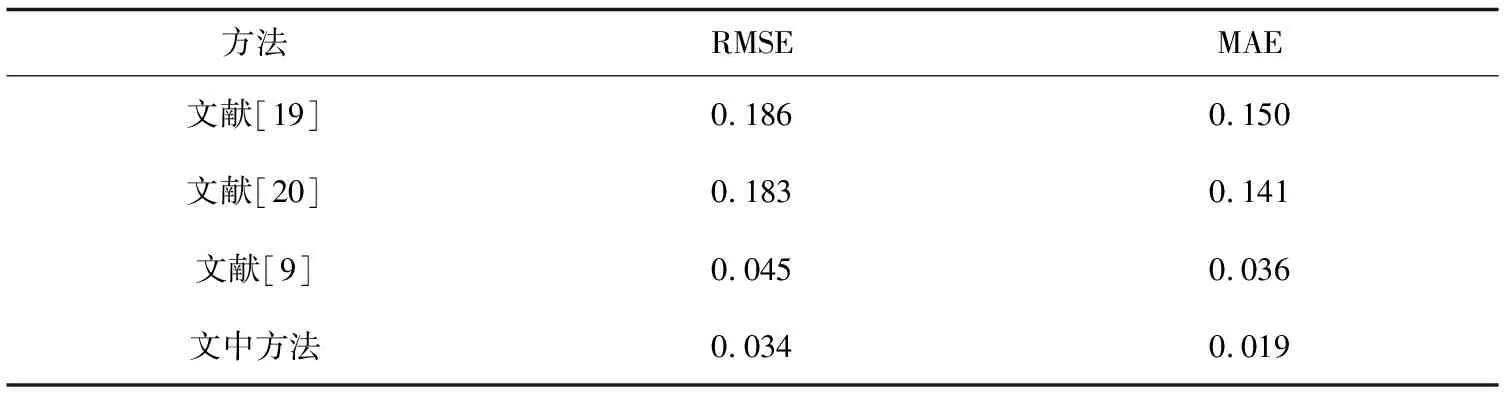
表4 文中方法與已有方法評價指標(biāo)值
由表4可知,與已有方法中預(yù)測誤差較低的文獻(xiàn)[9]所提方法相比,文中方法預(yù)測準(zhǔn)確率在RMSE與MAE兩個評價指標(biāo)上分別獲得了24.4%與47.2%的提升,證明了文中方法的先進(jìn)性。
為進(jìn)一步驗(yàn)證文中方法的有效性與泛化性,使用西安交通大學(xué)與浙江長興昇陽科技有限公司提供的XJTU-SY滾動軸承加速壽命試驗(yàn)數(shù)據(jù)集進(jìn)行實(shí)驗(yàn)。該數(shù)據(jù)集共包含3種工況下15個滾動軸承的全壽命周期振動信號。振動信號由水平和豎直方向上兩個加速度傳感器采集,采樣頻率為25.6 kHz,采樣間隔為1 min,一個采樣周期長度為1.28 s[21]。取分屬三種工況的軸承1_1、軸承2_1及軸承3_1的全壽命周期振動信號作為研究對象。經(jīng)數(shù)據(jù)降噪、特征提取及篩選、數(shù)據(jù)集劃分等步驟后,分別對與前述Autoformer模型參數(shù)一致的Transformer模型、Informer模型和Autoformer模型進(jìn)行訓(xùn)練及測試。三種模型方法在三種工況測試集上的評價指標(biāo)值如表5所示。
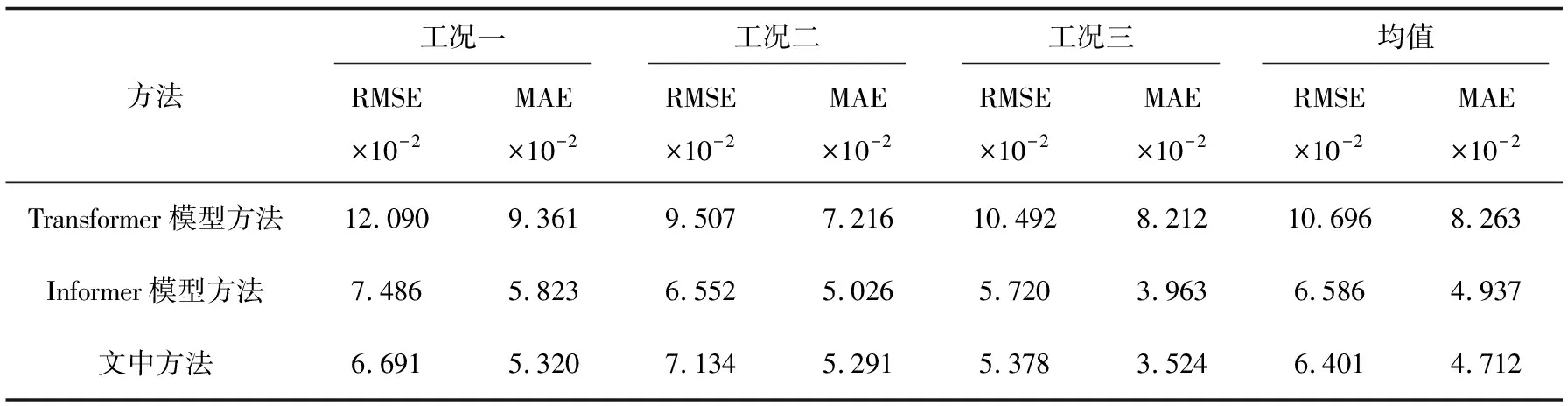
表5 XJTU-SY數(shù)據(jù)集下各方法評價指標(biāo)值
由表5可知,文中方法相較Transformer模型方法、Informer模型方法在RMSE值分別降低了41.16%和2.81%,在MAE值分別降低了42.97%和4.56%,進(jìn)一步證明了文中方法的有效性與泛化性。
4 結(jié)束語
提出一種基于NLMS自適應(yīng)濾波器和Autoformer模型的滾動軸承RUL預(yù)測方法。經(jīng)過實(shí)驗(yàn)分析,得到以下結(jié)論:
(1)NLMS自適應(yīng)濾波器對降低預(yù)測誤差具有重要作用。實(shí)驗(yàn)證明NLMS自適應(yīng)濾波器可較好地對滾動軸承原始振動信號進(jìn)行降噪;在使用相同參數(shù)設(shè)置的Autoformer模型作為預(yù)測模型的情況下,文中方法在評價指標(biāo)上的表現(xiàn)優(yōu)于未降噪方法;
(2)基于Autoformer模型的滾動軸承RUL預(yù)測方法具有有效性與先進(jìn)性。實(shí)驗(yàn)證明Autoformer模型可有效建立多維特征集與滾動軸承RUL之間的復(fù)雜映射,文中方法的預(yù)測曲線與真實(shí)曲線最為貼合,與對比方法、已有方法相比預(yù)測誤差最低,可更為準(zhǔn)確地預(yù)測滾動軸承RUL。
盡管文中方法在滾動軸承RUL預(yù)測領(lǐng)域取得了較好效果,但仍未避免滯后預(yù)測現(xiàn)象的發(fā)生,后續(xù)可通過改進(jìn)模型結(jié)構(gòu)等措施減輕或消除滯后預(yù)測現(xiàn)象。
猜你喜歡
科學(xué)大眾(2023年17期)2023-10-26 07:39:14
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
天天愛科學(xué)(2020年6期)2020-09-10 07:22:44
瘋狂英語·新策略(2019年10期)2019-12-13 08:43:28
當(dāng)代陜西(2019年10期)2019-06-03 10:12:04
電子制作(2018年11期)2018-08-04 03:25:42
數(shù)學(xué)物理學(xué)報(2017年6期)2018-01-22 02:26:40
數(shù)學(xué)小靈通·3-4年級(2017年9期)2017-10-13 08:10:54
鑿巖機(jī)械氣動工具(2016年3期)2016-03-01 04:00:25