基于時(shí)差法的復(fù)雜轉(zhuǎn)子系統(tǒng)聲發(fā)射源定位算法
2024-03-11 02:15:04王丕彤
測(cè)控技術(shù) 2024年2期
關(guān)鍵詞:信號(hào)實(shí)驗(yàn)
王丕彤, 于 洋
(沈陽(yáng)工業(yè)大學(xué) 信息科學(xué)與工程學(xué)院, 遼寧 沈陽(yáng) 110870)
復(fù)雜轉(zhuǎn)子系統(tǒng)在電力、機(jī)械制造和石油化工等領(lǐng)域有著廣泛的應(yīng)用,碰摩是復(fù)雜轉(zhuǎn)子系統(tǒng)中最常發(fā)生的故障之一,而碰摩位置的精準(zhǔn)定位對(duì)設(shè)備的安全運(yùn)行十分重要。在現(xiàn)有的聲發(fā)射(Acoustic Emission,AE)源定位方法中,基于到達(dá)時(shí)差(Time Difference of Arrival,TDOA)的方法成為較常用的AE源定位方法。在這種方法中,最直接影響定位精度的是時(shí)延估計(jì)算法。
劉增華等[1]針對(duì)實(shí)際工程中,材料中不同方向的AE信號(hào)的傳播速度不一致的問(wèn)題,提出了一種先使用預(yù)構(gòu)建數(shù)據(jù)庫(kù)的方法記錄各個(gè)傳感器的TDOA,再篩選得到真實(shí)AE源與訓(xùn)練映射AE源差值最小的點(diǎn),即AE源。李曉崧等[2]針對(duì)復(fù)雜材料表面AE源定位問(wèn)題,提出了一種基于信號(hào)相似度的方法,使用自適應(yīng)小波算法對(duì)復(fù)雜材料原始AE信號(hào)進(jìn)行降噪并重構(gòu)后再定位。鞠雙等[3]對(duì)采集的復(fù)雜材料表面AE信號(hào)先進(jìn)行小波分解,再分析被處理信號(hào),最后采用時(shí)差定位算法,計(jì)算得到AE信號(hào)沿縱軸與橫軸方向的傳播規(guī)律。袁梅等[4]針對(duì)航天器中復(fù)雜材料AE源定位技術(shù)精度低等問(wèn)題,將AE信號(hào)進(jìn)行自適應(yīng)分解重構(gòu)后使用廣義互相關(guān)時(shí)差定位算法。
基于上述研究,本文引入一種基于平滑相關(guān)變換(Smoothed Coherence Transform,SCOT)的雙加權(quán)二次互相關(guān)時(shí)延估計(jì)算法,計(jì)算復(fù)雜轉(zhuǎn)子系統(tǒng)的碰摩聲發(fā)射源信號(hào)的到達(dá)時(shí)間差,再利用Hilbere差值法對(duì)相關(guān)峰值進(jìn)行銳化,減小在碰摩過(guò)程中噪聲的干擾,以獲得較為精確的時(shí)延估計(jì)結(jié)果,提高復(fù)雜轉(zhuǎn)子系統(tǒng)的碰摩聲發(fā)射源定位的精度。
1 算法研究
1.1 互相關(guān)時(shí)延估計(jì)算法
設(shè)兩個(gè)傳感器探頭采集的AE信號(hào)模型為
x1(n)=s1(n-τ1)+n1(n)
(1)
x2(n)=s2(n-τ2)+n2(n)
(2)
式中:s1(n-τ1)和s2(n-τ2)為AE信號(hào);τ1和τ2為AE源到探頭的時(shí)間;n1(n)和n2(n)為高斯白噪聲。
x1(n)和x2(n)的相關(guān)函數(shù)R12(τ)可以表示為
R12(τ)=E[x1(n)x2(n-τ)]
(3)
將式(1)和式(2)代入式(3)可得
R12(τ)=E{s(n-τ1)s(n-τ1-τ)+
E[s(n-τ1)n2(n-τ)]}+
E[s(n-τ2-τ)n1(n)]+
E[n1(n)n2(n-τ)]
(4)
由于s(n)、n1(n)與n2(n)不相關(guān),可得:
R12(τ)=E[s(n-τ1)s(n-τ1-τ)]
=Rs[τ-(τ1-τ2)]
(5)
互相關(guān)函數(shù)的性質(zhì)表明,當(dāng)τ-(τ1-τ2)=0時(shí),R12得到的極大值τ是兩個(gè)探頭間的時(shí)延[5]。
在上述推導(dǎo)中,默認(rèn)情況下,AE信號(hào)與噪聲之間以及噪聲與噪聲之間沒(méi)有相關(guān)性[6]。
但是,在工程實(shí)踐中該結(jié)果并不理想,由于只能使用有限時(shí)間平均而不能使用無(wú)限時(shí)間平均,使得噪聲對(duì)這種短時(shí)近似引起的相關(guān)函數(shù)的影響不能被忽略。
上述問(wèn)題將導(dǎo)致R12(τ)相關(guān)峰值和TDOA值的精度降低,因此,廣義互相關(guān)[7]技術(shù)應(yīng)運(yùn)而生。
常用的廣義加權(quán)函數(shù)如表1所示[8]。
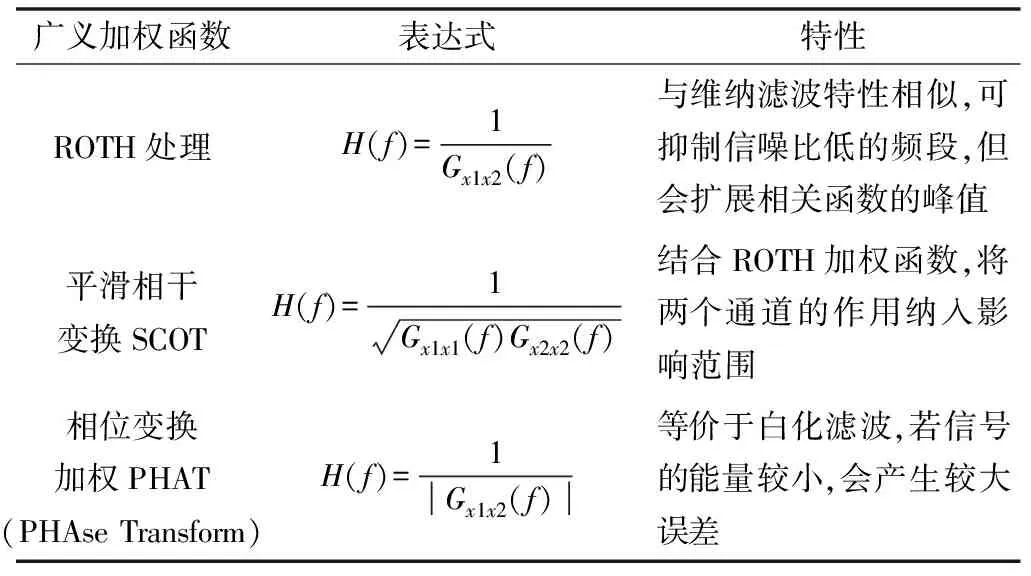
表1 常用的廣義加權(quán)函數(shù)
表1中,Gx1x2(f)在互相關(guān)中表示信號(hào)x1(n)和x2(n)的互功率譜。
在二次互相關(guān)中,將第一次自相關(guān)看作x1(n),第一次互相關(guān)看作x2(n)。
根據(jù)Wiener-Khinchin定理,可得:
(6)
式中:G12(ω)為信號(hào)x1(n)和x2(n)的互功率譜。廣義互相關(guān)方法[9-11]是將信號(hào)互功率譜在頻域加權(quán)運(yùn)算,然后進(jìn)行逆變換,得到兩組信號(hào)間的廣義互相關(guān)函數(shù):
(7)
1.2 基于SCOT雙加權(quán)二次互相關(guān)時(shí)延估計(jì)算法
廣義雙加權(quán)二次互相關(guān)法是利用二次相關(guān)算法對(duì)廣義互相關(guān)算法進(jìn)行優(yōu)化的時(shí)延估計(jì)算法,結(jié)合了兩者的優(yōu)點(diǎn),其算法框圖如圖1所示。
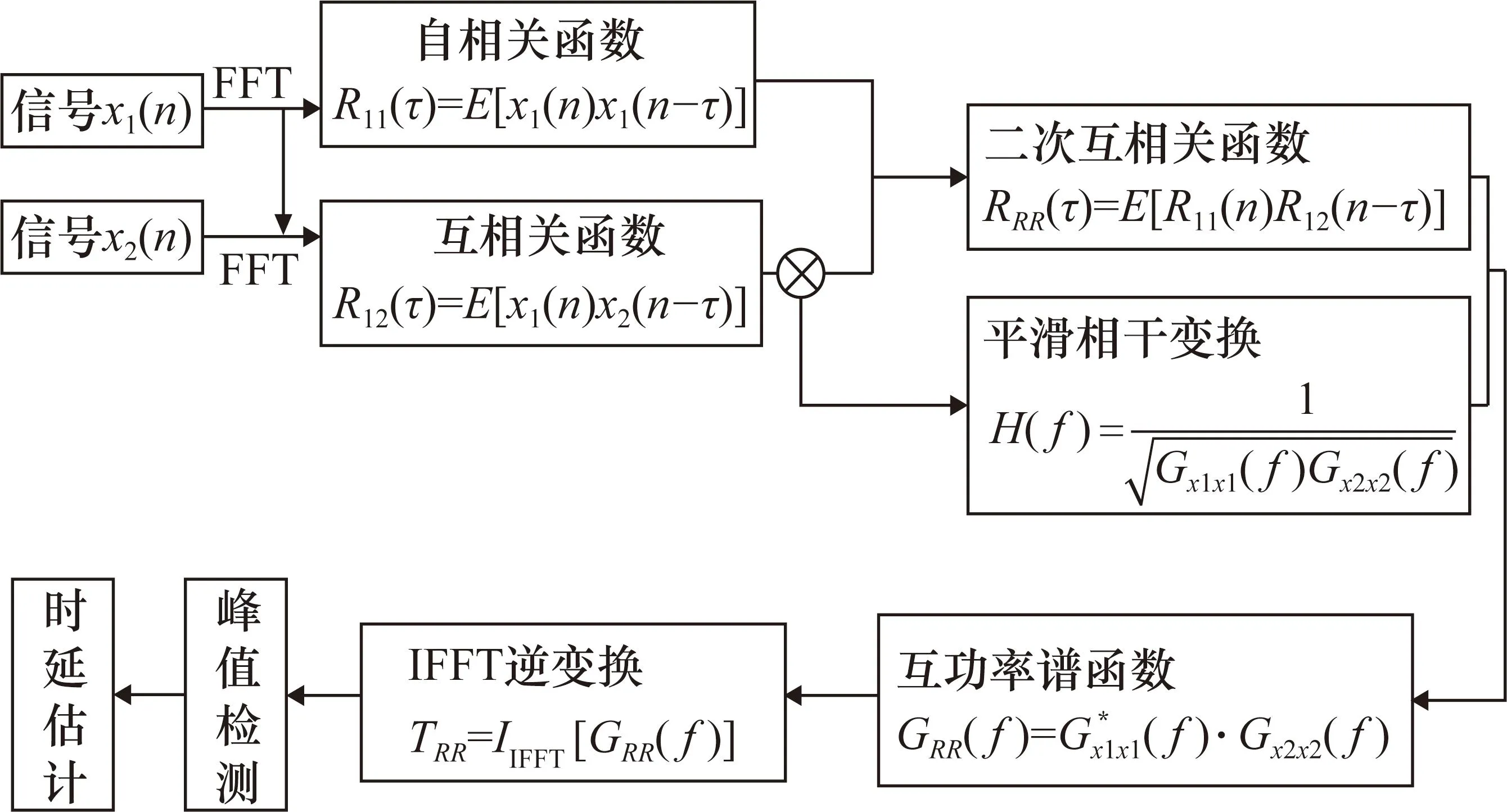
圖1 基于SCOT雙加權(quán)二次互相關(guān)算法框圖
x1(n)、x2(n)為兩路傳感器采集信號(hào),經(jīng)過(guò)FFT方法處理,獲得信號(hào)自相關(guān)函數(shù)和互相關(guān)函數(shù),再對(duì)互相關(guān)函數(shù)進(jìn)行第一次加權(quán)處理后,與自相關(guān)函數(shù)結(jié)合,得到二次互相關(guān)函數(shù),再對(duì)其進(jìn)行第二次加權(quán)處理后得到互功率譜函數(shù),通過(guò)傅里葉逆變換(IIFFT)得到互相關(guān)函數(shù),通過(guò)峰值檢測(cè)找到其峰值的對(duì)應(yīng)坐標(biāo),即兩個(gè)信號(hào)之間的時(shí)延。
1.3 Hilbere差值法
Hilbert變換相當(dāng)于在廣義互相關(guān)時(shí)延估計(jì)算法中將峰值提取轉(zhuǎn)變?yōu)閷?duì)應(yīng)的過(guò)零點(diǎn)提取。通過(guò)這種處理方法,可以消除一部分外界干擾。在正常情況下,該算法會(huì)獲得準(zhǔn)確的TDOA值。
但該算法仍然有不足之處,具體如下。
① 當(dāng)處理來(lái)自復(fù)雜、惡劣環(huán)境中的信號(hào)時(shí),信號(hào)中存在大量噪聲干擾將導(dǎo)致代表TDOA估計(jì)值的零點(diǎn)周圍發(fā)生波動(dòng),進(jìn)而使信號(hào)波反復(fù)過(guò)零點(diǎn)。
② 當(dāng)對(duì)一個(gè)信號(hào)進(jìn)行持續(xù)監(jiān)測(cè)時(shí),采集到的數(shù)據(jù)量將是巨大的,這會(huì)使算法得到許多的過(guò)零點(diǎn)。
這兩種情況都會(huì)使過(guò)零點(diǎn)位置無(wú)法判斷,進(jìn)而造成TDOA值準(zhǔn)確度大幅降低。為解決這兩種情況提出了Hilbert差值法[12],表達(dá)式如下:
(8)
Hilbert差值法框圖如圖2所示。
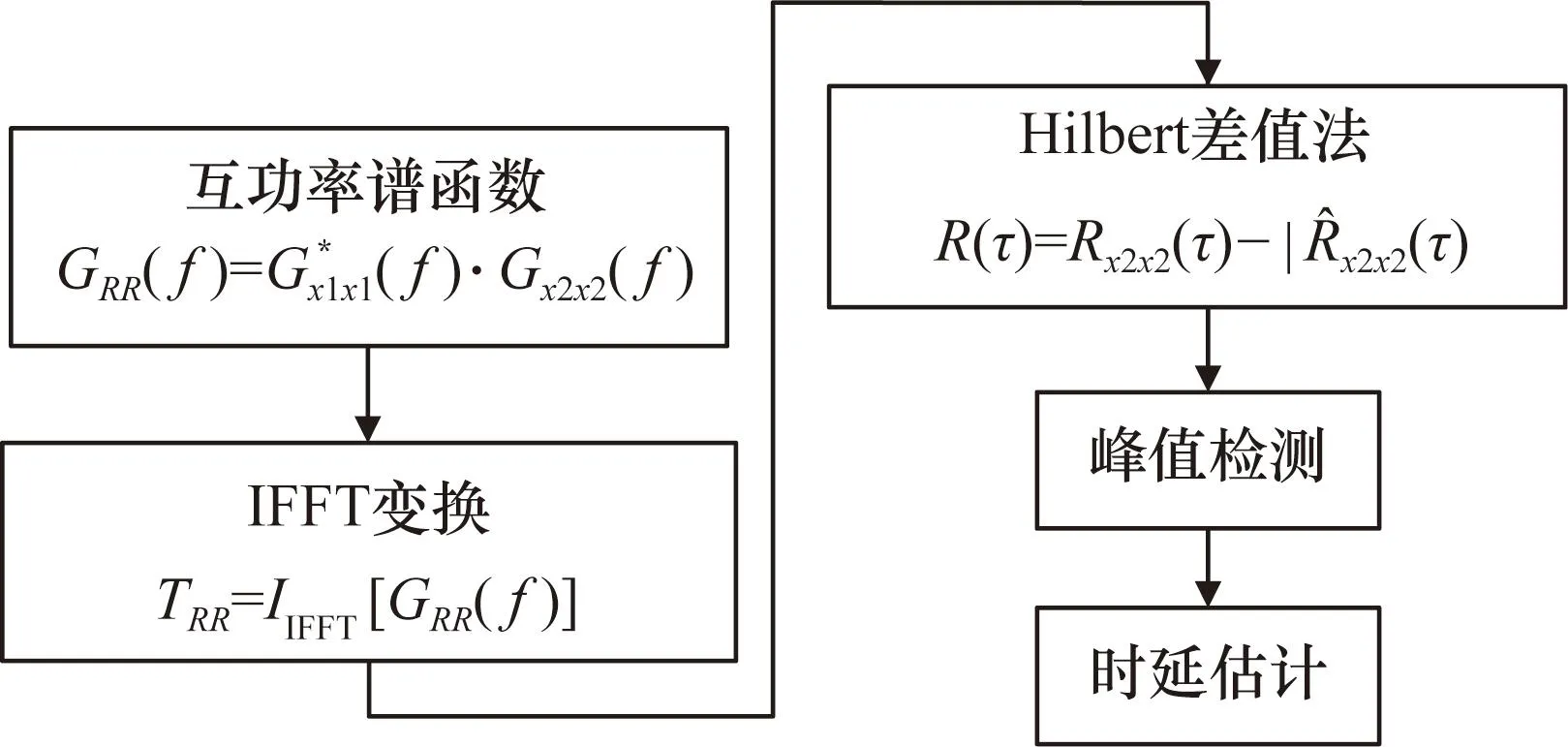
圖2 Hilbert差值法框圖
Hilbert差值法對(duì)峰值檢測(cè)進(jìn)行優(yōu)化,使互相關(guān)函數(shù)中峰值點(diǎn)兩邊的相關(guān)性降低,主峰值點(diǎn)得到銳化,過(guò)零點(diǎn)位置明顯,提高時(shí)延估計(jì)的精度。
1.4 AE源定位算法
AE源的一維線定位模型是由2個(gè)傳感器探頭構(gòu)成,如圖3所示。
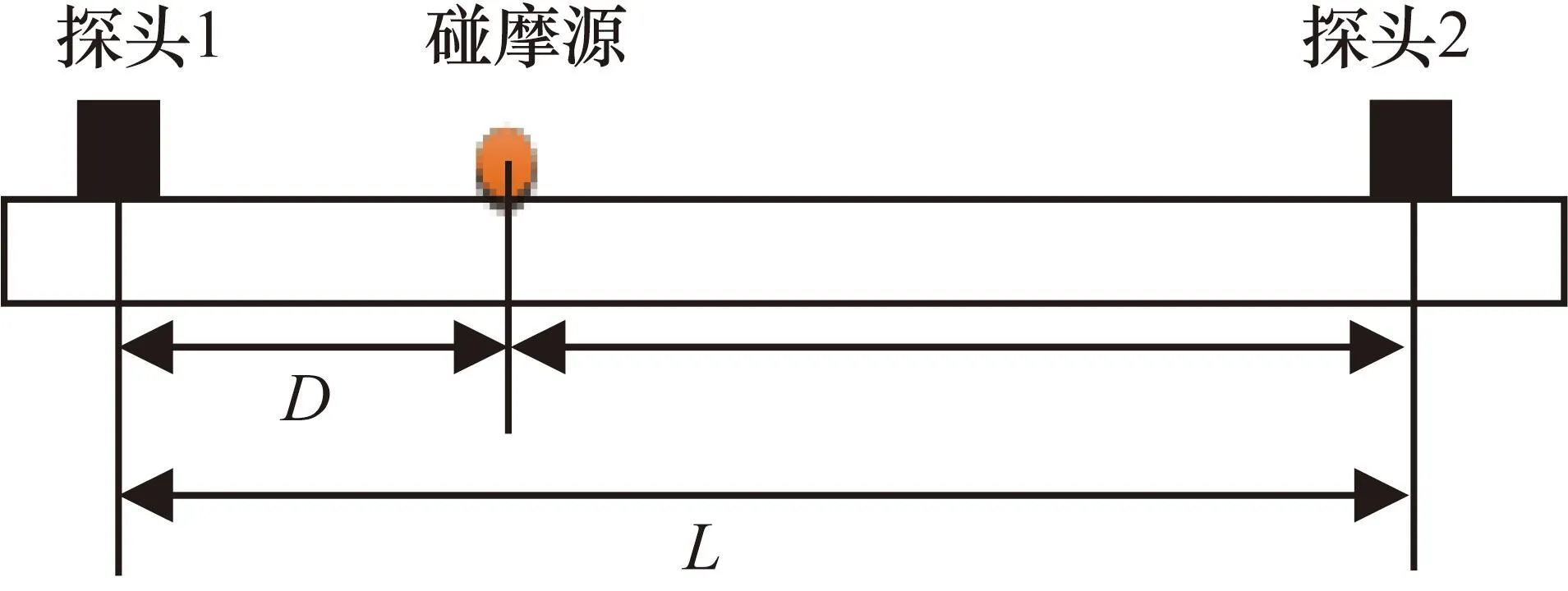
圖3 一維線定位模型
碰摩源信號(hào)到達(dá)探頭1和探頭2的時(shí)間分別為t1和t2,時(shí)間差為Δt。探頭間距離為L(zhǎng),碰摩源與探頭1距離為D,設(shè)AE源信號(hào)波傳播速度為v,則表達(dá)式如下:
(9)
AE源的二維線定位模型是由4個(gè)傳感器探頭構(gòu)成[13],如圖4所示。
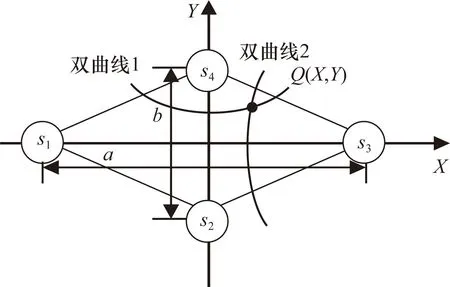
圖4 二維平面定位模型
碰摩源信號(hào)探頭s1和探頭s3間的時(shí)間差tx構(gòu)成雙曲線1,碰摩源信號(hào)探頭s2和探頭s4間的時(shí)差ty構(gòu)成雙曲線2,探頭s1和探頭s3距離為a,探頭s2和探頭s4距離為b,碰摩源Q(X,Y)位于雙曲線1和2的相交點(diǎn)上,碰摩源Q的坐標(biāo)為
(10)
(11)
Lx=Δtx·v
(12)
Ly=Δty·v
(13)
2 仿真實(shí)驗(yàn)
選用兩個(gè)信號(hào)進(jìn)行仿真實(shí)驗(yàn),設(shè)余弦信號(hào)s1(n)、s2(n)為仿真實(shí)驗(yàn)信號(hào),表達(dá)式如下:
s1(n)=0.5e-10Ntsin(2π·f0·t)
(14)
s2(n)=0.5e-10Ntsin(2π·f0·t1)
(15)
式中:fs=1 MHz,f0=100 kHz,N=1 000,其信號(hào)仿真圖如圖5所示。
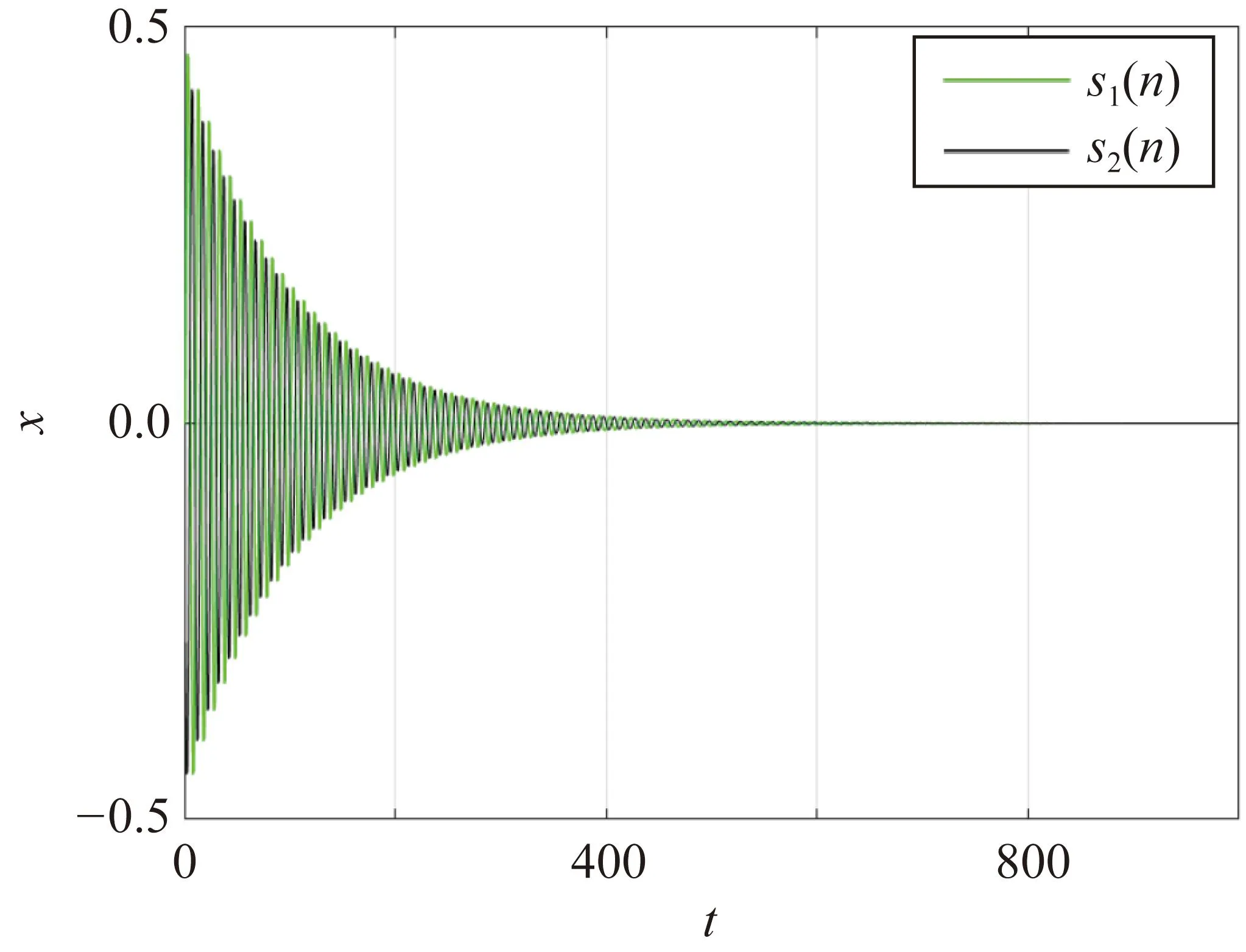
圖5 信號(hào)仿真
在兩個(gè)信號(hào)中分別加入信噪比為-10 dB和-15 dB的高斯白噪聲后,用廣義互相關(guān)、基于SCOT的雙加權(quán)二次互相關(guān)和Hilbert差值法改進(jìn)后的雙加權(quán)二次互相關(guān)時(shí)延估計(jì)算法求兩個(gè)信號(hào)的互相關(guān)函數(shù),如圖6所示。
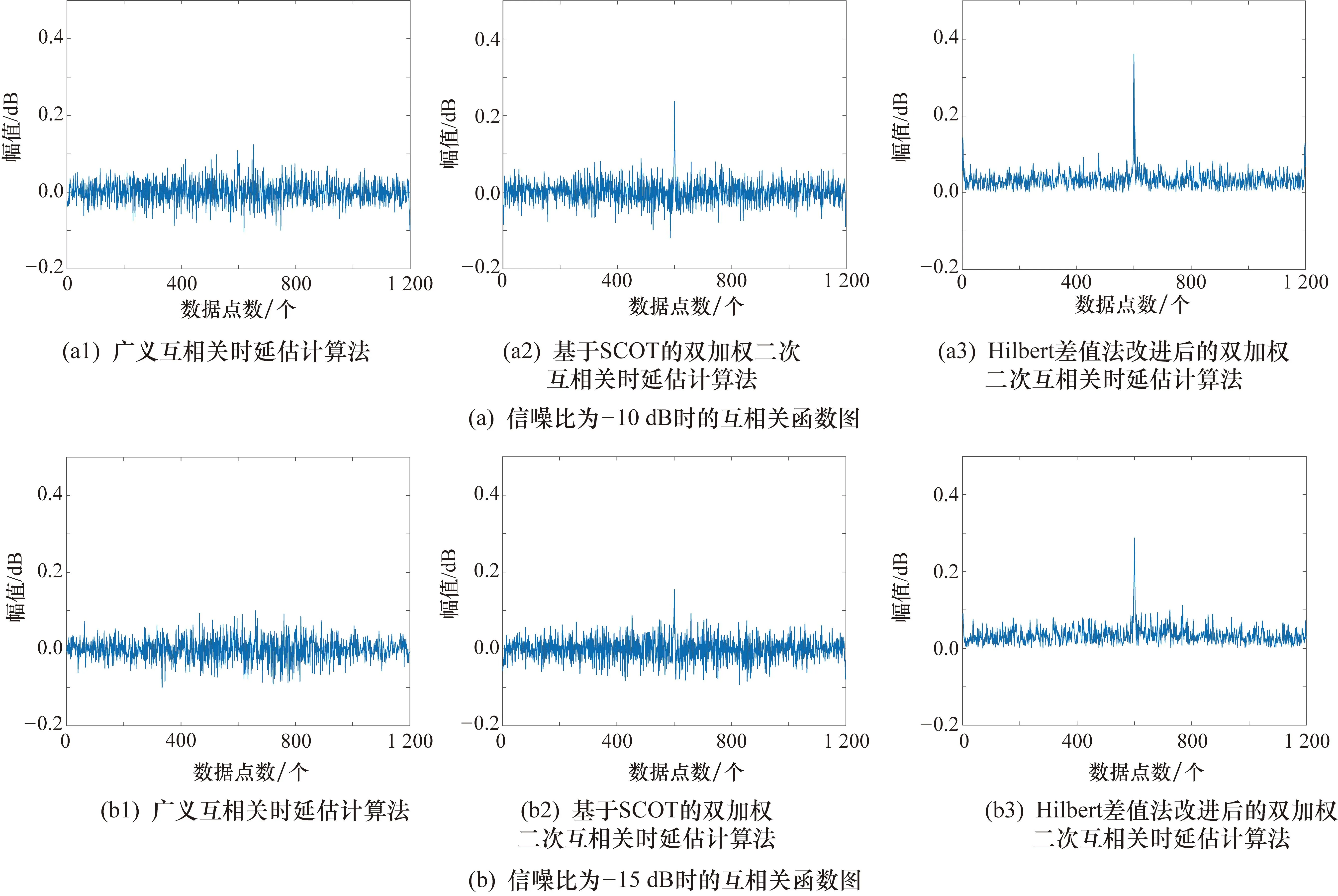
圖6 時(shí)延估計(jì)算法仿真對(duì)比圖
由圖6可得,當(dāng)信噪比為-10 dB和-15 dB時(shí),廣義互相關(guān)時(shí)延估計(jì)算法的互相關(guān)函數(shù)圖出現(xiàn)偽譜峰,無(wú)法得到正確的時(shí)延,雙加權(quán)二次互相關(guān)時(shí)延估計(jì)算法和Hilbert差值改進(jìn)后的雙加權(quán)二次互相關(guān)時(shí)延估計(jì)算法仍然可以得到正確的時(shí)延。但是后者的互相關(guān)函數(shù)圖明顯更優(yōu),所求時(shí)延更加準(zhǔn)確。
根據(jù)仿真實(shí)驗(yàn)的結(jié)果可見(jiàn),基于SCOT雙加權(quán)二次互相關(guān)時(shí)延估計(jì)算法適用的信噪比范圍廣泛,在低信噪比條件下可以保持穩(wěn)定的時(shí)延估計(jì)能力,Hilbert差值法的引入,銳化了互相關(guān)函數(shù)中的相關(guān)峰值,使獲得的時(shí)延值更精確。
3 轉(zhuǎn)子系統(tǒng)碰摩AE源定位實(shí)驗(yàn)
3.1 實(shí)驗(yàn)數(shù)據(jù)與分析
被測(cè)部件轉(zhuǎn)子系統(tǒng)外殼可近似為圓柱體,在外殼上布置12路傳感器對(duì)其進(jìn)行實(shí)時(shí)監(jiān)測(cè),轉(zhuǎn)子系統(tǒng)外殼模型及傳感器布置陣列如圖7所示。
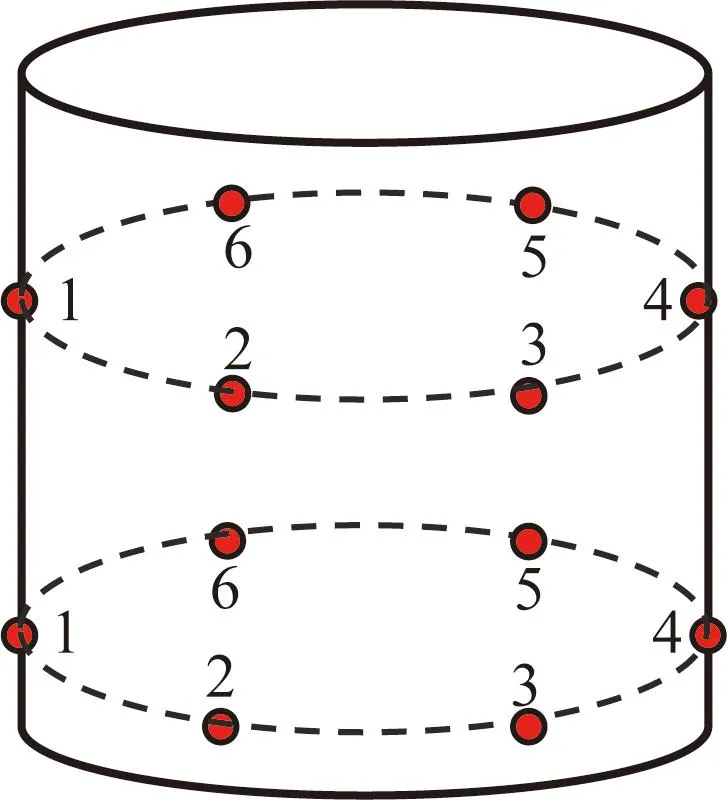
圖7 轉(zhuǎn)子系統(tǒng)外殼模型及傳感器布置陣列
第一層6路傳感器探頭接收AE源信號(hào)如圖8所示。第二層6路傳感器探頭接收AE源信號(hào)如圖9所示。

圖8 第一層6路傳感器接收AE源信號(hào)圖
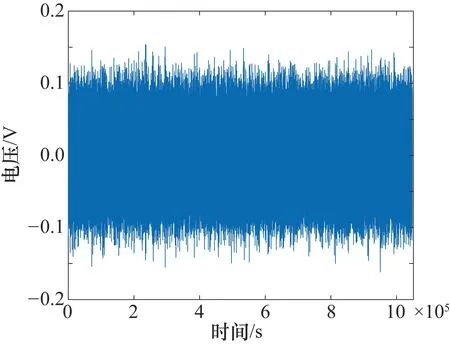
圖9 第二層6路傳感器接收AE源信號(hào)圖
分別利用廣義互相關(guān)算法、基于SCOT雙加權(quán)二次互相關(guān)算法和Hilbert差值法改進(jìn)后的雙加權(quán)二次互相關(guān)算法對(duì)傳感器探頭采集的信號(hào)進(jìn)行時(shí)延估計(jì),分別從3種算法算出的時(shí)延值中隨機(jī)選取了100對(duì)數(shù)據(jù)分成10組比較其平均相對(duì)誤差,結(jié)果如圖10所示。

圖10 平均相對(duì)誤差折線圖
由圖10可得,基于SCOT的雙加權(quán)二次互相關(guān)算法所求時(shí)延的平均相對(duì)誤差小于廣義互相關(guān)算法。用Hilbert差值法改進(jìn)后的雙加權(quán)二次相關(guān)算法所求時(shí)延值的平均相對(duì)誤差小于改進(jìn)前算法。
對(duì)被測(cè)部件一維上定位點(diǎn)進(jìn)行10次實(shí)驗(yàn),實(shí)驗(yàn)結(jié)果如表2所示。
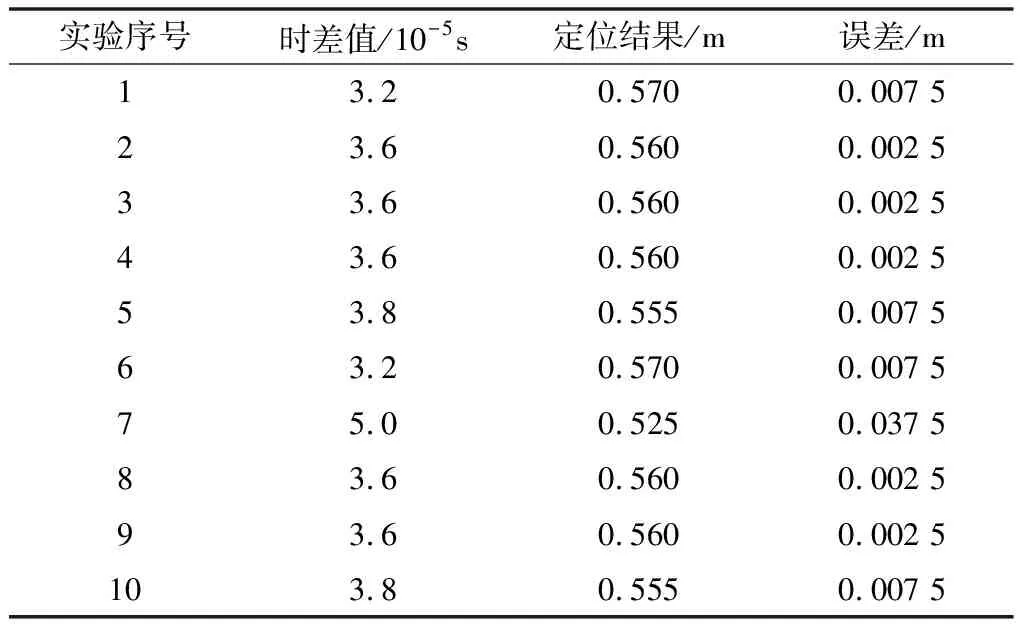
表2 被測(cè)部件一維上定位點(diǎn)(直線定位)實(shí)驗(yàn)結(jié)果
對(duì)被測(cè)部件二維上定位點(diǎn)進(jìn)行10次實(shí)驗(yàn),實(shí)驗(yàn)結(jié)果如表3所示。
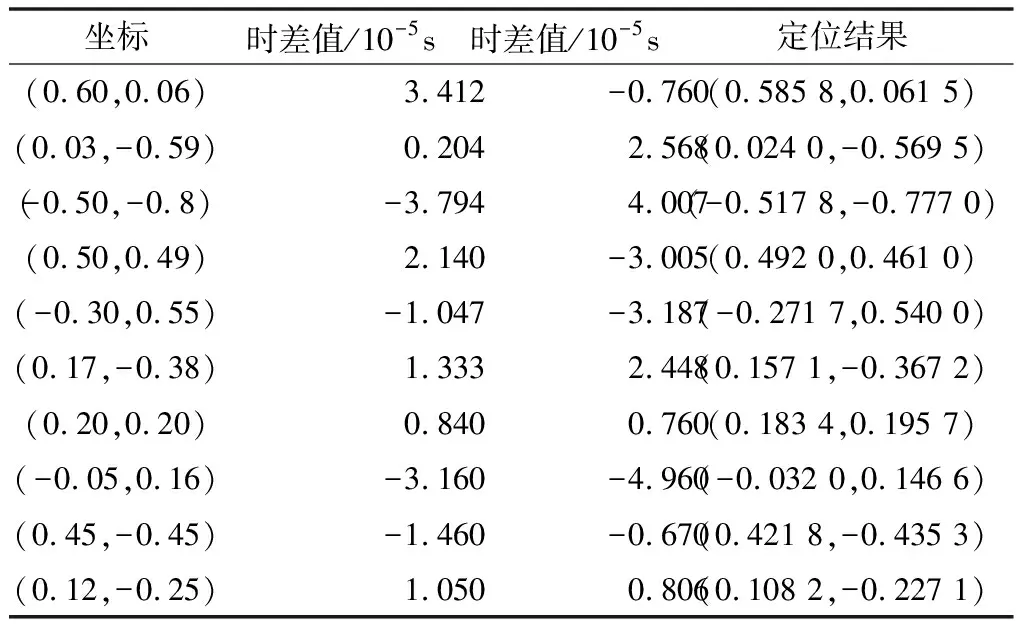
表3 被測(cè)部件二維上定位點(diǎn)(平面定位)實(shí)驗(yàn)結(jié)果
表2和表3中時(shí)差值由Hilbert差值法改進(jìn)后的雙加權(quán)二次互相關(guān)時(shí)延估計(jì)算法求出,再根據(jù)1.4節(jié)中的定位算法計(jì)算AE源位置,得到的結(jié)果與實(shí)際AE源位置之間的誤差滿足AE定位要求,具有實(shí)際意義。
3.2 定位實(shí)驗(yàn)結(jié)果
計(jì)算復(fù)雜轉(zhuǎn)子系統(tǒng)碰摩AE源信號(hào)中傳感器探頭之間的時(shí)延值進(jìn)行AE源定位,定位圖如圖11和圖12所示。
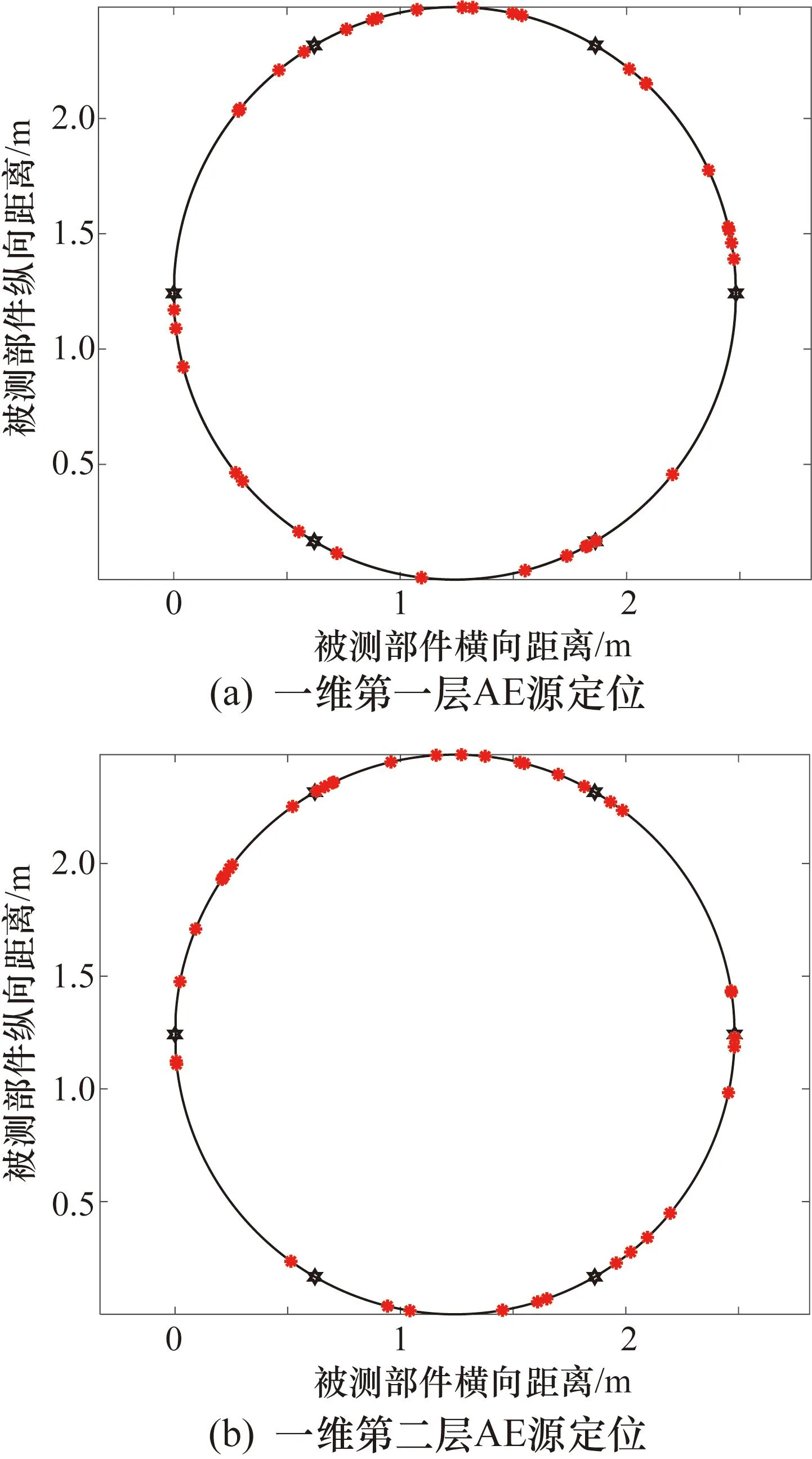
圖11 被測(cè)部件上碰摩AE源一維定位
圖11和圖12中,黑色六芒星表示傳感器,紅色星號(hào)表示定位點(diǎn)。圖11為被測(cè)部件上碰摩AE源在一維上的定位圖,圖12為被測(cè)部件上碰摩AE源在二維上的定位圖。
4 結(jié)論
實(shí)驗(yàn)結(jié)果表明,在復(fù)雜轉(zhuǎn)子系統(tǒng)的碰摩AE源定位實(shí)驗(yàn)中,基于SCOT的雙加權(quán)二次互相關(guān)時(shí)延估計(jì)算法相比于廣義互相關(guān)時(shí)延估計(jì)算法,具有波動(dòng)小、峰值尖銳和抗干擾能力強(qiáng)的特點(diǎn),可以求得準(zhǔn)確的時(shí)延值。Hilbere差值法的引入,銳化了相關(guān)峰值,使獲得的時(shí)延值更精確,從而可獲得更高的定位精度。
猜你喜歡
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
中學(xué)生數(shù)理化·中考版(2022年11期)2022-02-16 07:01:20
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評(píng)價(jià)·高一版(2020年6期)2020-11-02 02:45:24
小哥白尼(趣味科學(xué))(2019年6期)2019-10-10 01:01:50
中國(guó)生殖健康(2019年3期)2019-02-01 06:12:26
發(fā)明與創(chuàng)新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55
鑿巖機(jī)械氣動(dòng)工具(2016年3期)2016-03-01 04:00:25
海軍航空大學(xué)學(xué)報(bào)(2015年3期)2015-11-11 17:20:00
