基于BPNN和MOOGA的高速聯(lián)軸器多目標(biāo)優(yōu)化方法*
2024-03-11 01:03:34王藝琳王維民李維博王珈樂(lè)
機(jī)電工程 2024年2期
王藝琳,王維民,3*,李維博,王珈樂(lè),張 帥
(1.北京化工大學(xué) 機(jī)電工程學(xué)院,北京 100029;2.北京化工大學(xué) 高端機(jī)械裝備健康監(jiān)控與自愈化北京市重點(diǎn)實(shí)驗(yàn)室,北京 100029;3.北京化工大學(xué) 高端壓縮機(jī)及系統(tǒng)技術(shù)國(guó)家重點(diǎn)實(shí)驗(yàn)室,北京 100029)
0 引 言
隨著工業(yè)場(chǎng)合對(duì)轉(zhuǎn)子系統(tǒng)轉(zhuǎn)速的要求越來(lái)越高,傳統(tǒng)膜片聯(lián)軸器已不能滿足高速重載轉(zhuǎn)子系統(tǒng)傳遞高扭矩、大轉(zhuǎn)速及高容錯(cuò)的要求[1]。
超高速膜盤聯(lián)軸器以其優(yōu)越的性能,已被廣泛應(yīng)用于各類高速重載場(chǎng)合。近幾十年來(lái),汽車和航空工業(yè)的主要目標(biāo)一直是減輕質(zhì)量、提高速度、節(jié)約能源。為了縮短加工時(shí)間、節(jié)約制造能源,需要設(shè)計(jì)一款更精巧、轉(zhuǎn)速更高、補(bǔ)償性能更好的聯(lián)軸器。
超高速轉(zhuǎn)子系統(tǒng)利用撓性聯(lián)軸器、依靠膜盤平穩(wěn)地傳遞扭矩,以補(bǔ)償聯(lián)軸器安裝制造過(guò)程中的平行和角向不對(duì)中。高轉(zhuǎn)速聯(lián)軸器工作時(shí),承受大離心力、扭矩、平行和角向補(bǔ)償?shù)葟?fù)雜載荷情況。如何在這類工況條件下,降低聯(lián)軸器彎曲剛度,并減小其危險(xiǎn)應(yīng)力是目前聯(lián)軸器多目標(biāo)優(yōu)化工作的重點(diǎn)。
長(zhǎng)期以來(lái),為提高聯(lián)軸器的工作轉(zhuǎn)速和優(yōu)化其動(dòng)力學(xué)性能,不少學(xué)者對(duì)膜盤聯(lián)軸器進(jìn)行了研究。
易源霖等人[2]基于軸復(fù)合剛度計(jì)算原理和Karush-Kuhn-Tucker最優(yōu)化條件方法,計(jì)算了凸緣聯(lián)軸器扭轉(zhuǎn)剛度,發(fā)現(xiàn)了聯(lián)軸器凸緣部分徑向厚度和軸向長(zhǎng)度對(duì)剛度的影響最大;但其并沒(méi)有在研究的基礎(chǔ)上提出結(jié)構(gòu)的改進(jìn)方案。李寬[3]采用有限元分析法和集中參數(shù)法,分析了轉(zhuǎn)速和軸向伸縮量對(duì)聯(lián)軸器軸向剛度的影響;但其沒(méi)有對(duì)聯(lián)軸器強(qiáng)度特性進(jìn)行研究。曹安港等人[4]采用有限元仿真軟件,分析了多種工況條件下聯(lián)軸器應(yīng)力分布情況;但其沒(méi)有進(jìn)一步研究聯(lián)軸器設(shè)計(jì)參數(shù)對(duì)應(yīng)力分布的影響。NAGESH S等人[5]采用有限元分析法,分析了高速撓性聯(lián)軸器的動(dòng)力學(xué)特性方程,并進(jìn)行了試驗(yàn)驗(yàn)證;但其未研究復(fù)合工況下聯(lián)軸器的動(dòng)力學(xué)特性。馬同玲等人[6]采用正交實(shí)驗(yàn)和數(shù)值計(jì)算的方法,研究了聯(lián)軸器結(jié)構(gòu)參數(shù)對(duì)其第三階彎曲模態(tài)固有頻率的影響,發(fā)現(xiàn)了柔性桿直徑、電機(jī)端膜片斜度和發(fā)動(dòng)機(jī)端膜片斜度對(duì)第三階彎曲模態(tài)固有頻率影響最大,并提出了一種結(jié)構(gòu)優(yōu)化方案;但其沒(méi)有對(duì)該優(yōu)化方案開(kāi)展仿真實(shí)驗(yàn)驗(yàn)證。El-WAKEEL A等人[7]基于模糊邏輯、粒子群優(yōu)化和單純形方法,提出了一種混合模糊粒子群優(yōu)化-單純形算法,利用模糊粒子群優(yōu)化-單純形算法進(jìn)行了聯(lián)軸器結(jié)構(gòu)參數(shù)優(yōu)化,提高了聯(lián)軸器扭轉(zhuǎn)性能;但其未將該算法和其他優(yōu)化算法進(jìn)行比較,以說(shuō)明該方法的優(yōu)越性。于洋等人[8]基于聯(lián)軸器扭轉(zhuǎn)剛度性能,提出了一種優(yōu)化聯(lián)軸器設(shè)計(jì)方法,提高了柔性聯(lián)軸器的使用壽命;但其沒(méi)有研究復(fù)合工況下聯(lián)軸器的彎曲剛度性能。于慧艷[9]采用ANSYS響應(yīng)面優(yōu)化方法,對(duì)聯(lián)軸器強(qiáng)度進(jìn)行了優(yōu)化設(shè)計(jì);但是其未綜合考慮聯(lián)軸器的強(qiáng)度特性和動(dòng)力學(xué)特性。
隨著聯(lián)軸器設(shè)計(jì)轉(zhuǎn)速的提高,單一優(yōu)化目標(biāo)不再滿足要求,需要綜合考慮聯(lián)軸器強(qiáng)度和動(dòng)力學(xué)特性。反向傳播神經(jīng)網(wǎng)絡(luò)在工業(yè)領(lǐng)域的應(yīng)用廣泛,不少學(xué)者[10-12]利用反向傳播神經(jīng)網(wǎng)絡(luò)結(jié)合遺傳算法進(jìn)行了機(jī)械構(gòu)件的優(yōu)化工作。
基于以上優(yōu)化設(shè)計(jì)思路,筆者進(jìn)行了聯(lián)軸器多目標(biāo)優(yōu)化設(shè)計(jì)。
首先,針對(duì)傳遞轉(zhuǎn)速達(dá)1×105r/min、補(bǔ)償平行不對(duì)中0.1×10-3m、角向不對(duì)中0.25 °的超高速撓性聯(lián)軸器強(qiáng)度及剛度優(yōu)化問(wèn)題,筆者通過(guò)正交實(shí)驗(yàn)和拉丁超立方抽樣實(shí)驗(yàn),對(duì)比多項(xiàng)式擬合法和反向傳播神經(jīng)網(wǎng)絡(luò)法得到的聯(lián)軸器結(jié)構(gòu)參數(shù)與危險(xiǎn)應(yīng)力、彎曲剛度的目標(biāo)函數(shù),采用反向傳播神經(jīng)網(wǎng)絡(luò)結(jié)合遺傳算法對(duì)超高速膜盤聯(lián)軸器的關(guān)鍵尺寸參數(shù)進(jìn)行多目標(biāo)優(yōu)化,并對(duì)優(yōu)化解集的可靠性進(jìn)行驗(yàn)證。
1 基于神經(jīng)網(wǎng)絡(luò)擬合的多目標(biāo)優(yōu)化
1.1 關(guān)鍵參數(shù)選取
影響膜盤聯(lián)軸器強(qiáng)度特性及動(dòng)力學(xué)特性的參數(shù)眾多,筆者采用多因素方差分析法篩選聯(lián)軸器關(guān)鍵參數(shù)。多因素方差分析能夠分析多個(gè)因素對(duì)應(yīng)力與彎曲剛度的影響是否顯著。
多因素方差分析的基本思路如下:
1)原假設(shè)。各個(gè)自變量不同水平下,總體均值無(wú)顯著性差異,并且自變量各效應(yīng)和交互作用為0;
2)計(jì)算檢驗(yàn)統(tǒng)計(jì)量F值和顯著性表征P值;
3)確定顯著性水平值,給定顯著性水平為0.15,比較各個(gè)自變量的顯著性P值。若P大于0.15,則表示原假設(shè)正確,變量對(duì)總體均值無(wú)顯著性差異;若P小于0.15則表征原假設(shè)錯(cuò)誤,即變量對(duì)目標(biāo)影響大,該因素對(duì)結(jié)果有顯著性影響,可選為關(guān)鍵計(jì)算參數(shù)。
1.2 目標(biāo)函數(shù)確定
為保證聯(lián)軸器撓性足夠小,并且降低應(yīng)力,需要對(duì)聯(lián)軸器進(jìn)行多目標(biāo)優(yōu)化。采用遺傳算法函數(shù)進(jìn)行聯(lián)軸器參數(shù)多目標(biāo)優(yōu)化時(shí),需要能夠準(zhǔn)確反映參數(shù)性能的目標(biāo)函數(shù)。目標(biāo)函數(shù)的精確性越高,多目標(biāo)優(yōu)化的結(jié)果越可靠。目前常采用假定多項(xiàng)式法求解函數(shù)關(guān)系,多項(xiàng)式的項(xiàng)數(shù)越多,函數(shù)逼近的精度越高。
筆者采用二次多項(xiàng)式擬合三個(gè)關(guān)鍵參數(shù)與危險(xiǎn)應(yīng)力及彎曲剛度函數(shù)的關(guān)系,即:
(1)
(2)
式中:f為關(guān)鍵參數(shù)與危險(xiǎn)應(yīng)力函數(shù);A1,A2,A3,A4,A5,A6,A7為f函數(shù)未知擬合系數(shù);K為關(guān)鍵參數(shù)與彎曲剛度函數(shù);B1,B2,B3,B4,B5,B6,B7為K函數(shù)未知擬合系數(shù);x1,x2,x3為三個(gè)關(guān)鍵參數(shù)。
反向傳播神經(jīng)網(wǎng)絡(luò)[13]擅長(zhǎng)處理輸入與輸出因素間復(fù)雜的多元非線性關(guān)系。為避免訓(xùn)練之后的模型陷入過(guò)擬合狀態(tài),筆者采用貝葉斯正則化算法作為監(jiān)督算法。
反向傳播神經(jīng)網(wǎng)絡(luò)模型如圖1所示。

圖1 反向傳播神經(jīng)網(wǎng)絡(luò)示意圖
反向傳播神經(jīng)網(wǎng)絡(luò)所采用的非線性激活函數(shù)為tansig函數(shù),表示如下[14]:
(3)
式中:y為反向傳播神經(jīng)網(wǎng)絡(luò)非線性激活函數(shù);x為輸入變量值。
筆者采用總誤差準(zhǔn)則函數(shù)作為評(píng)價(jià)指標(biāo),表示如下:
(4)

對(duì)比上文所述兩種方法求得的目標(biāo)函數(shù)可知,采用多項(xiàng)式方法的擬合精度較低,采用反向傳播神經(jīng)網(wǎng)絡(luò)方法的擬合精度較高。
因此,筆者選取反向傳播神經(jīng)網(wǎng)絡(luò)擬合目標(biāo)函數(shù)進(jìn)行多目標(biāo)優(yōu)化。
1.3 基于遺傳算法的多目標(biāo)優(yōu)化方法
筆者利用多目標(biāo)優(yōu)化遺傳算法函數(shù)對(duì)聯(lián)軸器應(yīng)力函數(shù)f、彎曲剛度函數(shù)K進(jìn)行多目標(biāo)優(yōu)化計(jì)算。
相對(duì)單目標(biāo)優(yōu)化而言,多目標(biāo)優(yōu)化存在多個(gè)優(yōu)化目標(biāo),而這些優(yōu)化目標(biāo)之間往往相互聯(lián)系、制約甚至沖突。這意味著采用多目標(biāo)優(yōu)化不能得到某一組解,其得到的是一個(gè)Pareto解集[15-17]。
遺傳算法通過(guò)模擬生物演化過(guò)程,對(duì)優(yōu)化問(wèn)題進(jìn)行反復(fù)迭代,使得優(yōu)化解集收斂且均勻分布,避免優(yōu)化結(jié)果陷入局部?jī)?yōu)化狀態(tài),表示如下:
minF(x)={f1(x),f2(x),…,fm(x)}T
(5)
x={x1,x2,…,x3}T
(6)
xmin≤x≤xmax
(7)
式中:F(x)為多目標(biāo)函數(shù);x為設(shè)計(jì)變量;xmax為設(shè)計(jì)變量上限;xmin為設(shè)計(jì)變量下限。
2 聯(lián)軸器參數(shù)優(yōu)化
超高速撓性聯(lián)軸器內(nèi)外膜盤均采用焊接結(jié)構(gòu),內(nèi)膜盤采用螺栓法蘭與連接軸相連以傳遞轉(zhuǎn)速,其結(jié)構(gòu)如圖2所示。

圖2 聯(lián)軸器示意圖
聯(lián)軸器內(nèi)外膜盤均采用鈦合金TC4材料,其材料特性如表1所示。

表1 鈦合金TC4材料部分屬性
2.1 聯(lián)軸器仿真分析
筆者采用ANSYS有限元軟件對(duì)聯(lián)軸器進(jìn)行仿真分析。各參數(shù)分別為:輸入扭矩19.1 N·m,補(bǔ)償平行不對(duì)中0.1×10-3m,補(bǔ)償角向不對(duì)中量為0.25°。為方便后續(xù)開(kāi)展參數(shù)優(yōu)化工作,筆者直接利用ANSYS中自帶的編輯模塊進(jìn)行聯(lián)軸器參數(shù)化建模,利用Mesh模塊生成六面體網(wǎng)格。
聯(lián)軸器有限元模型如圖3所示。
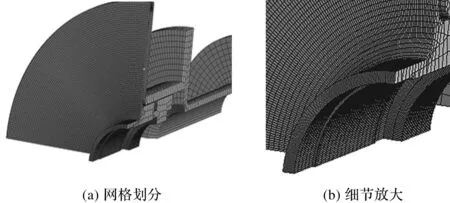
圖3 聯(lián)軸器有限元模型
聯(lián)軸器的原設(shè)計(jì)轉(zhuǎn)速6×104r/min,為滿足超高轉(zhuǎn)速轉(zhuǎn)子系統(tǒng)要求,筆者將聯(lián)軸器設(shè)計(jì)轉(zhuǎn)速提高至1×105r/min,其余輸入條件不變。
在設(shè)計(jì)轉(zhuǎn)速6×104r/min時(shí),聯(lián)軸器的仿真結(jié)果如圖4所示。

圖4 6×104 r/min膜盤組應(yīng)力情況
由圖4可得:當(dāng)轉(zhuǎn)速為6×104r/min時(shí),復(fù)合工況下膜盤聯(lián)軸器最大應(yīng)力集中在內(nèi)膜盤根部,最大應(yīng)力為194.46×106Pa。
轉(zhuǎn)速提高至1×105r/min時(shí),復(fù)合工況下聯(lián)軸器的仿真結(jié)果如圖5所示。

圖5 1×105 r/min膜盤組應(yīng)力情況
由圖5可得:轉(zhuǎn)速提高至1×105r/min時(shí),復(fù)合工況下膜盤聯(lián)軸器最大應(yīng)力集中在外膜盤根部,最大應(yīng)力為454.2×106Pa。
由圖5(b)可得:膜盤危險(xiǎn)應(yīng)力區(qū)域分布不均勻,此時(shí)膜盤發(fā)生不對(duì)稱彎曲。
接下來(lái),筆者分析計(jì)算兩種轉(zhuǎn)速下聯(lián)軸器危險(xiǎn)應(yīng)力和危險(xiǎn)點(diǎn)安全系數(shù)。
聯(lián)軸器不同轉(zhuǎn)速時(shí)應(yīng)力情況如表2所示。

表2 聯(lián)軸器不同轉(zhuǎn)速時(shí)應(yīng)力情況
由于筆者設(shè)計(jì)的膜盤聯(lián)軸器為薄壁焊接件,焊接后會(huì)產(chǎn)生焊接殘余應(yīng)力,該應(yīng)力會(huì)影響膜盤的組織性能[18-19]。筆者參考標(biāo)準(zhǔn)《GB50341-2014》,設(shè)定膜盤聯(lián)軸器膜盤組件最小設(shè)計(jì)安全系數(shù)為2.5。
設(shè)計(jì)安全系數(shù)n表示如下:
n≥2.5
(8)
原膜盤聯(lián)軸器在1×105r/min轉(zhuǎn)速下的安全系數(shù)小于設(shè)計(jì)要求,需要對(duì)聯(lián)軸器進(jìn)行優(yōu)化。另外在高速旋轉(zhuǎn)的復(fù)雜工況下,膜盤聯(lián)軸器易產(chǎn)生非對(duì)稱彎曲[20],需綜合考慮聯(lián)軸器的強(qiáng)度和動(dòng)力學(xué)特性。
超高速膜盤聯(lián)軸器設(shè)計(jì)的關(guān)鍵在于保證撓性的同時(shí)降低危險(xiǎn)應(yīng)力,即需要在降低聯(lián)軸器彎曲剛度的基礎(chǔ)上減小膜盤危險(xiǎn)應(yīng)力。
2.2 聯(lián)軸器關(guān)鍵參數(shù)選取
針對(duì)高速撓性聯(lián)軸器進(jìn)行優(yōu)化設(shè)計(jì)時(shí),需要考慮應(yīng)力和剛度條件。在降低聯(lián)軸器危險(xiǎn)應(yīng)力時(shí),其剛度需要盡可能小,以保證聯(lián)軸器具有足夠的撓性,降低兩端支撐的反作用載荷[21]。
聯(lián)軸器膜盤組件關(guān)鍵參數(shù)如圖6所示。
考慮聯(lián)軸器安裝和建模關(guān)系,筆者初選D、D3、h、h1、h2、h3為設(shè)計(jì)參數(shù)。膜盤組件其他參數(shù)由裝配及設(shè)計(jì)關(guān)系給出。
為找到影響聯(lián)軸器強(qiáng)度和彎曲剛度的關(guān)鍵參數(shù),筆者設(shè)計(jì)了正交實(shí)驗(yàn),如表3所示[22]。

表3 正交實(shí)驗(yàn)設(shè)計(jì)表
將表3數(shù)據(jù)代入有限元仿真軟件中,可以得到正交實(shí)驗(yàn)結(jié)果,如圖7所示。

圖7 正交實(shí)驗(yàn)應(yīng)力與彎曲剛度結(jié)果
筆者對(duì)圖7仿真結(jié)果進(jìn)行多因素方差分析,求得危險(xiǎn)應(yīng)力第三類平方和SSR(Ⅲ)、自由度df、均方E(x2)及對(duì)應(yīng)顯著性P關(guān)系,如表4所示。

表4 應(yīng)力多因素參數(shù)分析
經(jīng)多因素方差分析后,可以得到彎曲剛度的第三類平方和SSR(Ⅲ)、自由度df、均方E(x2)及對(duì)應(yīng)顯著性P,如表5所示。
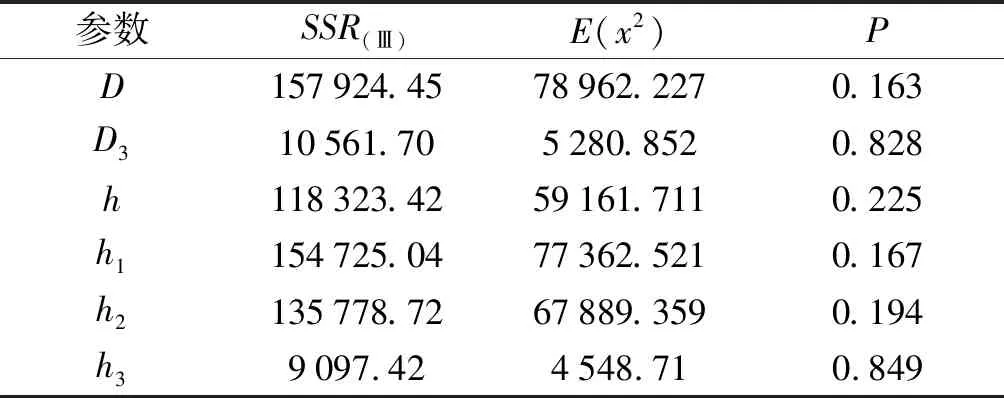
表5 彎曲剛度多因素參數(shù)分析
筆者針對(duì)D、D3、h、h1、h2、h3這六個(gè)參數(shù)進(jìn)行多因素方差分析,結(jié)果發(fā)現(xiàn),外膜盤外徑D和膜盤厚度h對(duì)膜盤應(yīng)力有顯著影響,外膜盤外徑D和外膜盤長(zhǎng)度h1的顯著性P值接近設(shè)定值,D和h1對(duì)聯(lián)軸器整體彎曲剛度有明顯影響作用。
考慮彎曲剛度和危險(xiǎn)應(yīng)力設(shè)計(jì)要求,筆者綜合選取參數(shù)D、h和h1為后續(xù)設(shè)計(jì)關(guān)鍵參數(shù)。
2.3 目標(biāo)函數(shù)求解
筆者采用拉丁超立方方程隨機(jī)生成55組參數(shù),利用有限元軟件,求解得到了多組仿真結(jié)果,如表6所示。

表6 55組仿真樣本點(diǎn)
2.3.1 多項(xiàng)式逼近
假定外膜盤外徑D、膜盤厚度h、外膜盤長(zhǎng)度h1與危險(xiǎn)應(yīng)力的函數(shù)關(guān)系式為,與彎曲剛度的數(shù)學(xué)關(guān)系式為K。
從圖7中隨機(jī)選擇7組正交實(shí)驗(yàn)結(jié)果代入式(1)、式(2),計(jì)算結(jié)果表示如下:
(9)
(10)

(11)

(12)
危險(xiǎn)應(yīng)力多項(xiàng)式擬合計(jì)算值與仿真計(jì)算結(jié)果對(duì)比圖如圖8所示。

圖8 危險(xiǎn)應(yīng)力多項(xiàng)式擬合結(jié)果與仿真結(jié)果對(duì)比圖
彎曲剛度多項(xiàng)式擬合結(jié)果與仿真結(jié)果對(duì)比圖如圖9所示。

圖9 彎曲剛度多項(xiàng)式擬合結(jié)果與仿真結(jié)果對(duì)比圖
多項(xiàng)式的項(xiàng)數(shù)越多,逼近的精度越高。但是采用多項(xiàng)式的項(xiàng)數(shù)總是有限的,精度不容易滿足要求。
由圖8、圖9可知:多項(xiàng)式計(jì)算值與仿真結(jié)果差異較大,其中應(yīng)力擬合誤差平均值達(dá)22.51%,彎曲剛度誤差達(dá)3.69%。
2.3.2 神經(jīng)網(wǎng)絡(luò)擬合法
反向傳播神經(jīng)網(wǎng)絡(luò)擅長(zhǎng)處理輸入與輸出因素間復(fù)雜的多元非線性關(guān)系。筆者利用反向傳播神經(jīng)網(wǎng)絡(luò)研究輸入?yún)?shù)與輸出變量間的定性關(guān)系,找到關(guān)鍵參數(shù)與危險(xiǎn)應(yīng)力和彎曲剛度間的函數(shù)表達(dá)式,結(jié)果如圖10所示。

圖10 反向傳播神經(jīng)網(wǎng)絡(luò)預(yù)測(cè)結(jié)果與仿真結(jié)果對(duì)比圖
由圖10可得:反向傳播神經(jīng)網(wǎng)絡(luò)預(yù)測(cè)效果良好,危險(xiǎn)應(yīng)力預(yù)測(cè)值與仿真結(jié)果的訓(xùn)練誤差為0.942%,測(cè)試誤差為0.727%,總誤差為0.948%;彎曲剛度預(yù)測(cè)值與仿真結(jié)果的訓(xùn)練誤差0.771%,測(cè)試誤差為14.371%,總誤差為2.927%。
由此可見(jiàn),反向傳播神經(jīng)網(wǎng)絡(luò)擬合誤差結(jié)果遠(yuǎn)小于多項(xiàng)式擬合誤差結(jié)果。
2.4 多目標(biāo)優(yōu)化
筆者利用遺傳算法函數(shù)對(duì)上面求得的應(yīng)力預(yù)測(cè)函數(shù)f和彎曲剛度預(yù)測(cè)函數(shù)K進(jìn)行多目標(biāo)優(yōu)化求解,得到的結(jié)果如表7所示。
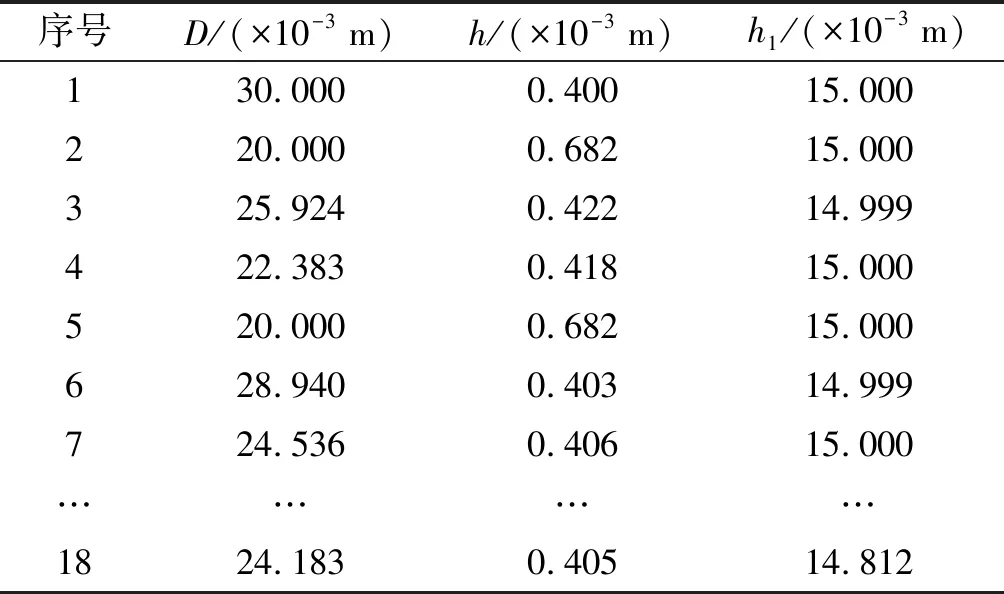
表7 多目標(biāo)優(yōu)化Pareto解集
表7所示的Pareto解集中,里面的每一個(gè)解都是優(yōu)化解。一方面,為滿足試件加工需求,薄壁膜盤厚度不能太小;另一方面,為減輕聯(lián)軸器質(zhì)量,膜盤外徑和膜盤厚度又不能太大。因此,膜盤厚度需要取適中值,膜盤外徑應(yīng)盡可能小。在滿足上述需求的同時(shí),還需減小聯(lián)軸器彎曲剛度,這要求外膜盤長(zhǎng)度合適。
綜上,筆者選取一組優(yōu)化參數(shù)為25.253×10-3m、0.406×10-3m及15×10-3m。
筆者比較所有多目標(biāo)優(yōu)化預(yù)測(cè)結(jié)果與仿真結(jié)果,求得18組預(yù)測(cè)值與仿真結(jié)果的相對(duì)誤差分布情況,如圖11所示。
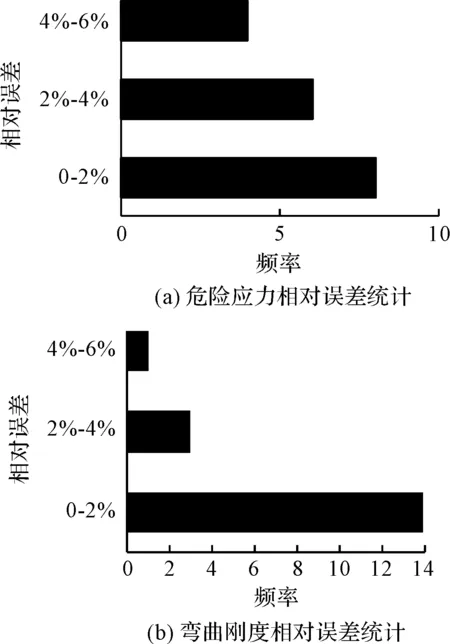
圖11 多目標(biāo)優(yōu)化結(jié)果與仿真結(jié)果對(duì)比圖
由圖11可知:多目標(biāo)優(yōu)化后得到的應(yīng)力預(yù)測(cè)值與仿真計(jì)算值最小相對(duì)誤差為0.42%,平均相對(duì)誤差為2.74%,最大相對(duì)誤差為5.59%;彎曲剛度預(yù)測(cè)值與仿真計(jì)算值最小相對(duì)誤差為0.23%,平均相對(duì)誤差為1.52%,最大相對(duì)誤差為4.45%。
由此可見(jiàn),通過(guò)反向傳播神經(jīng)網(wǎng)絡(luò)擬合結(jié)合遺傳多目標(biāo)優(yōu)化得到的優(yōu)化Pareto解集是可靠的。
2.5 有限元驗(yàn)證
筆者采用有限元分析軟件,求解了復(fù)雜工況下,優(yōu)化后聯(lián)軸器模型的仿真結(jié)果,如圖12所示。

圖12 仿真結(jié)果
優(yōu)化后膜盤聯(lián)軸器最大應(yīng)力值為371.48×106Pa,此時(shí)最大應(yīng)力位于外膜盤根部。
優(yōu)化前后對(duì)比結(jié)果如表8所示。

表8 優(yōu)化結(jié)果
由表8可知:優(yōu)化后的聯(lián)軸器危險(xiǎn)應(yīng)力為371.48×106Pa,降低了18.2%;彎曲剛度為5 428.89 N·m/rad,降低了5.05%;優(yōu)化后的聯(lián)軸器安全系數(shù)為2.69。
由此可見(jiàn),優(yōu)化后的聯(lián)軸器強(qiáng)度及剛度都滿足優(yōu)化目標(biāo)。
比較優(yōu)化后聯(lián)軸器的補(bǔ)償能力性能,即其計(jì)算結(jié)果如表9所示。
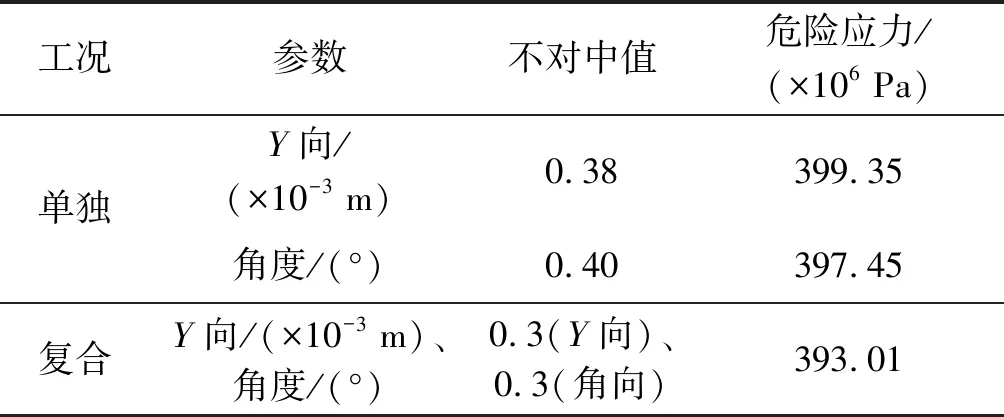
表9 優(yōu)化聯(lián)軸器補(bǔ)償能力
由表9可知:優(yōu)化后聯(lián)軸器允許最大平行不對(duì)中為0.38×10-3m,最大角向不對(duì)中值為0.4°,允許復(fù)合不對(duì)中值為0.3×10-3m(平行)、0.3°(角度)。
由此可見(jiàn),優(yōu)化后聯(lián)軸器的補(bǔ)償能力明顯提高。
3 結(jié)束語(yǔ)
針對(duì)聯(lián)軸器高轉(zhuǎn)速、復(fù)合工況下的優(yōu)化問(wèn)題,筆者采用反向傳播神經(jīng)網(wǎng)絡(luò)和多目標(biāo)優(yōu)化遺傳算法相結(jié)合的方法,對(duì)膜盤聯(lián)軸器進(jìn)行了參數(shù)優(yōu)化;優(yōu)化后,聯(lián)軸器強(qiáng)度和動(dòng)力學(xué)特性均得到了明顯改善;最后,結(jié)合有限元分析,對(duì)優(yōu)化預(yù)測(cè)的準(zhǔn)確性進(jìn)行了驗(yàn)證。
研究結(jié)論如下:
1)膜盤聯(lián)軸器在高轉(zhuǎn)速、復(fù)合不對(duì)中的影響下,聯(lián)軸器膜盤發(fā)生不對(duì)稱彎曲和應(yīng)力集中現(xiàn)象。聯(lián)軸器危險(xiǎn)應(yīng)力超過(guò)設(shè)計(jì)要求;
2)柔性聯(lián)軸器危險(xiǎn)應(yīng)力受外膜盤外徑D和膜盤厚度h影響較大,彎曲剛度受外膜盤外徑D和膜盤長(zhǎng)度h1影響較大;
3)對(duì)比多項(xiàng)式擬合和反向傳播神經(jīng)網(wǎng)絡(luò)擬合可知,預(yù)測(cè)結(jié)果較為可靠。多目標(biāo)優(yōu)化后,聯(lián)軸器補(bǔ)償不對(duì)中能力得到了提升,聯(lián)軸器危險(xiǎn)應(yīng)力下降了18.2%,彎曲剛度值下降了5.05%,優(yōu)化效果良好。
由于聯(lián)軸器實(shí)驗(yàn)轉(zhuǎn)速高、實(shí)驗(yàn)條件復(fù)雜,短時(shí)間內(nèi)無(wú)法完成現(xiàn)場(chǎng)實(shí)驗(yàn)。因此,在下一階段,筆者將開(kāi)展相關(guān)實(shí)驗(yàn),以驗(yàn)證上述優(yōu)化結(jié)果是否可靠。
猜你喜歡
房地產(chǎn)導(dǎo)刊(2022年5期)2022-06-01 06:20:14
建材發(fā)展導(dǎo)向(2021年12期)2021-07-22 08:06:48
建材發(fā)展導(dǎo)向(2021年7期)2021-07-16 07:07:52
中學(xué)生數(shù)理化(高中版.高二數(shù)學(xué))(2021年12期)2021-04-26 07:43:48
藝術(shù)啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
機(jī)械工程師(2015年10期)2015-02-02 01:14:03
機(jī)電產(chǎn)品開(kāi)發(fā)與創(chuàng)新(2014年4期)2014-03-11 16:42:24
上海金屬(2013年4期)2013-12-20 07:57:18