高速跨介質(zhì)入水多相流動(dòng)與流固耦合特性研究綜述
2024-03-07 02:56:28明付仁王嘉捷劉文韜劉祥聚張阿漫
空氣動(dòng)力學(xué)學(xué)報(bào) 2024年1期
明付仁,王嘉捷,劉文韜,劉祥聚,張阿漫
(哈爾濱工程大學(xué) 船舶工程學(xué)院, 哈爾濱 150001)
0 引 言
航行體高速跨介質(zhì)入水在海洋工程、航空航天領(lǐng)域中具有明確的研究背景,其中許多重要研究集中在國(guó)防領(lǐng)域,例如空投魚(yú)雷、超空泡射彈等跨介質(zhì)航行器的研制[1]。隨著武器系統(tǒng)發(fā)展和防御體系的日益完善,當(dāng)前對(duì)跨介質(zhì)航行器以更高速度入水的需求越來(lái)越迫切,入水初速度有時(shí)可達(dá)上百米每秒。高速跨介質(zhì)入水是跨介質(zhì)航行器實(shí)現(xiàn)空水轉(zhuǎn)化的重要過(guò)程,常出現(xiàn)自由液面飛濺、空化相變、氣液混合流動(dòng)現(xiàn)象。由于介質(zhì)突變,產(chǎn)生的強(qiáng)沖擊載荷對(duì)跨介質(zhì)航行器的結(jié)構(gòu)強(qiáng)度、彈道特性等具有重要影響。美國(guó)在20世紀(jì)30年代研制了空投魚(yú)雷并在二戰(zhàn)中投入使用,但由于缺乏對(duì)高速跨介質(zhì)入水的多相流動(dòng)及流固耦合機(jī)理的認(rèn)識(shí),魚(yú)雷出現(xiàn)了結(jié)構(gòu)塑性破壞、部件失效以及偏離軌跡等多類(lèi)問(wèn)題,其中有20%沉沒(méi),18%深度失準(zhǔn),36%未啟動(dòng),20%偏航,僅有31%正常運(yùn)行(多種故障并存被重復(fù)統(tǒng)計(jì))[2]。
Moran曾指出[3]:“航行體出入水是一個(gè)富有挑戰(zhàn)的數(shù)理難題,可涉及液面大變形和破碎、空化、重力、黏性、氣體密度和表面張力等,對(duì)于跨水空介質(zhì)過(guò)程,沒(méi)有任何一種通用的理論分析方法能夠得出有效的近似結(jié)果。”航行體高速跨介質(zhì)入水是復(fù)雜的多相流動(dòng)和流固耦合作用過(guò)程,當(dāng)航行體運(yùn)動(dòng)速度超過(guò)150 m/s時(shí),相對(duì)于空氣和水中聲速的馬赫數(shù)分別達(dá)到了0.5和0.1以上,頭部撞擊水面會(huì)在水中形成強(qiáng)壓縮的沖擊波,同時(shí)引起水面破碎和飛濺,瞬態(tài)沖擊致使水中出現(xiàn)低壓空化區(qū)域;隨著航行體入水深度增加,會(huì)逐步形成空泡流動(dòng),出現(xiàn)膨脹、潰滅和射流等氣液混合流動(dòng)現(xiàn)象。高速跨介質(zhì)入水航行體的軸向載荷會(huì)先后經(jīng)歷“水錘”壓力和水動(dòng)力壓力兩個(gè)階段,“水錘”壓力為ρcv量級(jí)(ρ為流體密度,c為流體聲速,v為航行體頭部速度),而水動(dòng)力壓力為ρv2/2量級(jí);而法向/徑向載荷發(fā)生在航行體頭部和側(cè)壁沾濕以后,常引起航行體產(chǎn)生尾拍現(xiàn)象(如圖1所示),尾拍沖擊壓力可達(dá)到軸向沖擊壓力的數(shù)倍,導(dǎo)致航行體產(chǎn)生大幅忽撲運(yùn)動(dòng)響應(yīng)[4],同時(shí)也可能誘導(dǎo)航行體產(chǎn)生非線性振動(dòng)響應(yīng),甚至彎曲折斷[5](如圖2所示)。

圖1 跨介質(zhì)入水的空泡流動(dòng)及劇烈的尾拍現(xiàn)象Fig.1 Cavitation flow and violent tail slamming during water entry
圖2 跨介質(zhì)入水尾拍作用導(dǎo)致航行體的彎曲折斷過(guò)程[5]Fig.2 Bending and breaking process of the projectile caused by the action of the tail slamming during water-entry[5]
在前期研究中,許多研究學(xué)者將跨介質(zhì)入水過(guò)程分解為4個(gè)典型階段,即撞擊水面階段、液面流動(dòng)階段、開(kāi)空泡階段和空泡閉合階段[6](如圖3所示)。在撞擊水面階段,頭部強(qiáng)壓縮空氣形成氣墊,自由液面大變形,流場(chǎng)中形成強(qiáng)間斷的波系;在液面流動(dòng)階段,氣液混合流沿著航行體爬升、脫離邊界層,以慣性向外飛濺,頭部流場(chǎng)逐漸發(fā)展為空泡,低壓區(qū)出現(xiàn)局部相變空化,由于介質(zhì)突變,此過(guò)程會(huì)產(chǎn)生顯著的軸向沖擊過(guò)載;在開(kāi)空泡階段,空泡逐漸的拉伸會(huì)形成低壓空腔,空氣不斷地卷入空泡內(nèi)部(如圖4所示),形成多相摻雜流動(dòng),同時(shí)空泡壁在慣性作用下擴(kuò)張,航行體與空泡壁發(fā)生砰擊作用,引起法向沖擊載荷和俯仰力矩,導(dǎo)致航行體俯仰角速度瞬態(tài)變化,有時(shí)甚至出現(xiàn)初始彈道的不穩(wěn)定以及航行體結(jié)構(gòu)振動(dòng)、局部變形或損壞等;在空泡閉合階段,受重力和空泡內(nèi)外壓差作用,自由液面回落引起空泡閉合和振蕩,航行體在空泡中向前運(yùn)動(dòng),尾部會(huì)與空泡壁發(fā)生反復(fù)碰撞,即尾拍作用,該過(guò)程會(huì)產(chǎn)生不連續(xù)的、高峰值的尾拍載荷,導(dǎo)致航行體出現(xiàn)忽撲運(yùn)動(dòng)[4],同時(shí)也可維持航行體的彈道穩(wěn)定。

圖3 航行體跨介質(zhì)入水的4個(gè)典型階段Fig.3 Four typical stages of water-entry of transmedium vehicles
圖4 高速跨介質(zhì)入水航行體尾部空氣卷入現(xiàn)象(航行體直徑273 mm,入水速度240 m/s,角度30°)Fig.4 Air entrainment at the tail of the vehicle during highspeed water entry (The vehicle has a diameter of 273 mm, an incident velocity of 240 m/s, an incident angle of 30 deg )
整個(gè)高速跨介質(zhì)入水的多相流動(dòng)和流固耦合過(guò)程呈現(xiàn)出流場(chǎng)對(duì)流遷移、結(jié)構(gòu)塑性損傷和破壞等典型的非線性特征,涉及到水彈道學(xué)、多相流體動(dòng)力學(xué)、空泡動(dòng)力學(xué)、流固耦合動(dòng)力學(xué)等眾多基礎(chǔ)力學(xué)問(wèn)題,相關(guān)研究具有重要的科學(xué)意義。此外,通過(guò)探明高速跨介質(zhì)入水的多相流動(dòng)和流固耦合等相關(guān)機(jī)理與規(guī)律可為高速跨介質(zhì)航行體的降載增穩(wěn)、流動(dòng)控制、結(jié)構(gòu)安全設(shè)計(jì)等提供重要的技術(shù)支撐,具有重要的工程應(yīng)用價(jià)值和應(yīng)用前景。下面將分別從高速跨介質(zhì)入水的多相流動(dòng)與空泡演化、強(qiáng)沖擊載荷特性及降載方法、航行體運(yùn)動(dòng)穩(wěn)定性與流固耦合響應(yīng)特性以及多相流固耦合數(shù)值研究方法這4個(gè)方面進(jìn)行論述,并對(duì)高速跨介質(zhì)入水的發(fā)展動(dòng)態(tài)進(jìn)行展望。
1 高速跨介質(zhì)入水多相流動(dòng)與空泡演化特性
高速跨介質(zhì)入水流場(chǎng)存在自由液面大變形、流體相變、空泡流動(dòng)與閉合等復(fù)雜的氣-汽-液多相流動(dòng)過(guò)程,自由液面演化、空泡流動(dòng)等一直是關(guān)注的焦點(diǎn),自由液面作為入水空泡的“開(kāi)口”,其流動(dòng)與空泡的擴(kuò)張和閉合息息相關(guān)。在撞擊水面時(shí),流場(chǎng)經(jīng)歷強(qiáng)壓縮過(guò)程,在空氣中和水中形成復(fù)雜的波系,流場(chǎng)壓力、密度等存在強(qiáng)間斷面,部分水體會(huì)因拉伸作用而出現(xiàn)少量空化。在穿越水面和開(kāi)空泡時(shí),空泡壁在慣性作用下擴(kuò)張,空泡內(nèi)外開(kāi)始出現(xiàn)壓力差,一部分空氣被卷入空泡內(nèi)部。在航行體完全進(jìn)入空泡內(nèi)部后,空泡內(nèi)壓降低,產(chǎn)生更多的空化蒸汽,在慣性力、重力以及內(nèi)外壓力差作用下,空泡會(huì)逐漸趨于閉合[7],包裹著整個(gè)航行體一起向前運(yùn)動(dòng),如圖5所示;同時(shí)空泡尾部出現(xiàn)泄氣、潰滅和尾射流[8],如圖6所示。不同于高速水下航行的多相流動(dòng)與空泡演化過(guò)程,高速跨介質(zhì)入水過(guò)程受自由液面的影響較大,自由液面的向上隆起會(huì)縮短空泡的慣性擴(kuò)張過(guò)程,同時(shí)自由液面閉合也會(huì)加速空泡的收縮過(guò)程,引起空泡的擴(kuò)張和收縮時(shí)間的非對(duì)稱(chēng)性。
圖5 跨介質(zhì)入水空泡的形成及閉合過(guò)程[7]Fig.5 Cavity formation and closure process during water entry[7]

圖6 高速跨介質(zhì)入水空泡流動(dòng)與潰滅特性[8]Fig.6 Cavitation flow and collapse characteristics during high-speed water entry[8]
1.1 空泡形態(tài)演化及閉合特性
關(guān)于入水空泡形態(tài)的研究起步較早,最早可以追溯到1969年Logvinovich建立的空泡截面獨(dú)立擴(kuò)張理論,能夠很好地針對(duì)非定常空泡的不同截面演化進(jìn)行理論計(jì)算,為空泡理論的發(fā)展奠定了重要基礎(chǔ)[9]。發(fā)展至今,已有眾多學(xué)者對(duì)空泡形態(tài)演化進(jìn)行了深入研究,Hong等提出了一種簡(jiǎn)單的理論模型可用于斜入水空泡形狀的預(yù)測(cè),并通過(guò)圓柱定速入水試驗(yàn)驗(yàn)證發(fā)現(xiàn),隨著自由液面上方空氣密度減小,球體垂直入水引起的液面飛濺和表面閉合時(shí)間均會(huì)增加[10-11]。Zhang等提出的氣泡統(tǒng)一方程,計(jì)及空泡脈動(dòng)和環(huán)境耦合力,可用于預(yù)測(cè)空泡形態(tài)演化[12-14]。此外,早期受限于試驗(yàn)技術(shù),許多研究將簡(jiǎn)單的球體作為研究對(duì)象,研究了高速旋轉(zhuǎn)小球入水空泡的形成、發(fā)展、閉合和潰滅的演化過(guò)程[15-17],并指出垂直入水和斜入水在空泡演化方面存在顯著差別。空泡閉合形式一般可簡(jiǎn)單地分為面閉合和深閉合,深閉合時(shí)空泡潰滅及射流形式取決于航行體加速度與臨界值的關(guān)系;另外無(wú)論是否發(fā)生面閉合,都會(huì)產(chǎn)生深閉合,且深閉合時(shí)間為弗勞德數(shù)(Fr)的線性函數(shù)[18-19]。隨著試驗(yàn)技術(shù)不斷進(jìn)步,更多的試驗(yàn)研究表明航行體的穩(wěn)定性、航行阻力均與空泡形態(tài)極為相關(guān)[20-21]。不同尺度航行體,大至數(shù)百毫米口徑的魚(yú)雷,小至幾毫米口徑的射彈,其高速跨介質(zhì)入水過(guò)程均可劃分為空泡生成、發(fā)展和脫落階段,在空泡閉合區(qū)域出現(xiàn)強(qiáng)烈的汽-氣-水混合物回射流,同時(shí)在空泡尾部產(chǎn)生整齊、規(guī)律的脫落旋渦[8,22],如圖6和圖7所示。當(dāng)入水速度增加時(shí),流場(chǎng)可壓縮性影響增強(qiáng),將主要影響超空泡中部和尾部的形態(tài),使其半徑和長(zhǎng)度進(jìn)一步增加[23]。此外,還有學(xué)者分析了航行體頭型、弗勞德數(shù)(Fr)、航行體表面親疏水材料性質(zhì)等各種參數(shù)對(duì)空泡閉合時(shí)間、閉合位置以及空泡在自由液面處的最大半徑的影響。結(jié)果表明:隨著Fr增加,不同頭型航行體面閉合時(shí)間變化規(guī)律各不相同,平頭和半球頭航行體面閉合時(shí),自由液面處最大空泡直徑不斷減小,而對(duì)于圓錐頭航行體,最大直徑將會(huì)先增加后減小;面閉合后,對(duì)于半球頭和圓錐頭航行體,深閉合時(shí)最大空泡直徑隨Fr增加而增加,而閉合深度將會(huì)先緩慢變深后變淺[24];材料疏水性將促進(jìn)空泡形成,使空泡直徑變大,同時(shí)延緩了空泡閉合[25]。

圖7 平頭射彈空泡演化及尾部脫落旋渦發(fā)展歷程[22]Fig.7 Cavity evolution and shedding vortices characteristics during water entry of the projectile with flat nose[22]
1.2 空泡內(nèi)壓演化特性
航行體入水過(guò)程中空泡內(nèi)會(huì)形成低壓區(qū)(如圖8所示),壓力比周?chē)鲌?chǎng)的壓力低。當(dāng)航行體以較低速度入水時(shí),表面閉合一般很晚發(fā)生或者不發(fā)生,空泡內(nèi)壓最低時(shí)刻出現(xiàn)在空泡閉合前,此時(shí)航行體所受壓差作用影響較小。但是隨著入水速度增加,空泡內(nèi)壓最低值幾乎呈線性減小趨勢(shì)[26],航行體迎水面和背水面的壓差阻力逐漸增大[27]。尤其是在航行體頭部后方靠近航行體的區(qū)域壓力將會(huì)低于飽和蒸汽壓,從而產(chǎn)生空化,法向載荷增大,產(chǎn)生改變航行體運(yùn)動(dòng)姿態(tài)的俯仰力矩,導(dǎo)致航行體發(fā)生尾拍,破壞空泡的光順性,對(duì)高速跨介質(zhì)航行體運(yùn)動(dòng)穩(wěn)定性產(chǎn)生不利影響。另外,空泡內(nèi)壓還與航行體頭部幾何形狀有關(guān),現(xiàn)有研究表明航行體頭型將會(huì)改變高速跨介質(zhì)入水過(guò)程在自由液面處的空泡直徑,以及在自由液面上方形成皇冠狀水冢,這兩個(gè)因素都會(huì)影響空泡面閉合的時(shí)間,從而影響空泡內(nèi)壓的演化[28]。

圖8 高速跨介質(zhì)入水空泡內(nèi)壓隨時(shí)間變化[26]Fig.8 Time history of the inner pressure in cavity during high-speed water entry[26]
1.3 復(fù)雜環(huán)境的空泡演化特性
高速跨介質(zhì)入水空泡的演化特性與實(shí)際環(huán)境密切相關(guān)。實(shí)際工程應(yīng)用對(duì)多發(fā)彈體高速入水有著重要的需求,其中并行入水和異步入水的空泡形態(tài)演化規(guī)律也漸漸被掌握。Lu等開(kāi)展了異步并行入水研究,發(fā)現(xiàn)后射彈擠壓首射彈空泡內(nèi)側(cè),導(dǎo)致首射彈空泡輪廓形態(tài)不對(duì)稱(chēng),后發(fā)射彈的空泡在首發(fā)射彈空泡內(nèi)部低壓區(qū)的正向激勵(lì)下向航行體內(nèi)側(cè)膨脹,同時(shí)影響射彈的彈道特性[29]。由于海洋環(huán)境復(fù)雜多變,洋流與波浪聯(lián)合作用會(huì)對(duì)空泡產(chǎn)生重要影響(如圖9所示),尤其是橫流能夠促進(jìn)背流側(cè)空泡但抑制迎流側(cè)空泡[30]。此外,受復(fù)雜環(huán)境擾動(dòng)力影響,航行體容易發(fā)生尾拍現(xiàn)象,破壞空泡的形態(tài)和空泡壁的光滑度,導(dǎo)致航行體彈道失穩(wěn),使得航行體入水失敗,如圖10所示。為了維持航行體水下航行的空泡,許多學(xué)者提出了在航行體頭部通氣,基于通氣參數(shù)調(diào)節(jié)實(shí)現(xiàn)對(duì)通氣空泡流動(dòng)和演化的人工控制,空泡型式可由錐形逐漸變化為紡錘形[31],入水的最大沖擊力和壓力可分別降低92%和98%[32],從而達(dá)到流動(dòng)控制和減阻的效果。當(dāng)前,針對(duì)實(shí)際工程應(yīng)用環(huán)境,關(guān)于跨介質(zhì)入水的燃?xì)夂屯饪张菅芯咳源嬖诤艽蟮牟蛔恪?/p>
圖9 波浪環(huán)境對(duì)航行體入水空泡演化的影響(航行體直徑324 mm,入水速度100 m/s,角度30°)Fig.9 Influence of wave environment on the cavity flow of a vehicle during water entry (The vehicle has a diameter of 324 mm,an incident velocity of 100 m/s, an incident angle of 30 deg)

圖10 航行體入水尾拍導(dǎo)致彈道失穩(wěn)(航行體直徑100 mm,入水速度40 m/s,角度20°)Fig.10 Ballistic instability caused by the tail slamming of the vehicle during water entry (The vehicle has a diameter of 100 mm,an incident velocity of 40 m/s, an incident angle of 20 deg)
2 高速跨介質(zhì)入水強(qiáng)沖擊載荷特性與降載方法
關(guān)于跨介質(zhì)入水的沖擊載荷,最初比較經(jīng)典的理論始于Von Karman等引入附加質(zhì)量對(duì)水上飛機(jī)降落沖擊壓力的推導(dǎo)和計(jì)算[33]。此后,Wagner進(jìn)一步考慮了入水過(guò)程的水面凸起及噴濺厚度,引入了楔形體底升角修正因子,但仍只適用于小底升角入水問(wèn)題[34]。Mei等、Korobkin 和 Scolan進(jìn)一步推廣了Wagner理論[35-36],將其應(yīng)用于一般二維物體和簡(jiǎn)單的三維物體,通過(guò)特定的線性化假設(shè),開(kāi)展了垂直入水的水動(dòng)力載荷理論研究,但這些線性模型仍存在局限性,后續(xù)許多學(xué)者進(jìn)行了改進(jìn)研究,如Zhao 和 Faltinsen的任意截面體模型[37],Semenov 和 Iafrati的軸對(duì)稱(chēng)體入水模型[38]、Hulin等的計(jì)及重力的Wagner模型[39]。入水沖擊載荷的理論研究起步較早,但相關(guān)研究多集中在某些特定的、簡(jiǎn)單幾何問(wèn)題上,缺乏完善的理論模型。
2.1 撞擊水面過(guò)程的沖擊載荷特性
撞擊水面過(guò)程的沖擊載荷主要發(fā)生在航行體軸向,流體壓縮性是沖擊載荷特性研究的重要方面。當(dāng)航行體入水速度較高或者頭部比較鈍時(shí),流體的壓縮性將會(huì)對(duì)載荷產(chǎn)生重要影響[40]。現(xiàn)有研究表明,當(dāng)入水速度小于100 m/s時(shí),流體壓縮性對(duì)入水沖擊載荷基本沒(méi)有影響,隨著入水速度增加,流體的壓縮性影響變大[41-42]。為了計(jì)及流體壓縮性,許多學(xué)者基于線性化假設(shè),推導(dǎo)出入水沖擊最大的壓力為 ρcv量級(jí)( ρ,c,v分別為流體密度、聲速和入水速度),即“水錘壓力”,局部壓力可以達(dá)到幾十甚至上千個(gè)大氣壓,而當(dāng)航行體頭部完全浸入水中,沖擊載荷急劇減小,并趨近于水動(dòng)壓力。當(dāng)考慮流體真實(shí)可壓縮性時(shí),高速跨介質(zhì)入水的阻力系數(shù)、空泡尺寸將會(huì)有所增加[43]。此外,許多研究發(fā)現(xiàn)航行體軸向過(guò)載的峰值基本發(fā)生在入水初期,通過(guò)理論分析和數(shù)值模擬等已對(duì)其有了很好的認(rèn)識(shí),并采用激波影像可視化系統(tǒng)捕捉并研究了高速跨介質(zhì)入水沖擊波的傳播特性[44]。Sui等開(kāi)展了跨介質(zhì)入水沖擊試驗(yàn)研究[45],建立了可壓縮流體的流動(dòng)與入水沖擊載荷的聯(lián)系,分析了沖擊載荷的形成過(guò)程。此外,學(xué)者們對(duì)沖擊載荷的影響因素也進(jìn)行了大量探索,結(jié)果表明頭型、入水速度、角度和攻角[46]、波浪環(huán)境[47-48]、極地冰區(qū)環(huán)境[49]等多種因素均會(huì)對(duì)沖擊載荷產(chǎn)生影響。平頭航行體由于水動(dòng)力面較大,會(huì)產(chǎn)生較大的沖擊壓力,而截錐頭型、錐型頭型等由于流體的爬升會(huì)卸載瞬態(tài)的沖擊壓力,導(dǎo)致沖擊載荷降低。此外,相比于垂直入水,斜入水過(guò)程的沖擊壓力也會(huì)隨著流體沿著航行體壁面的流動(dòng)而導(dǎo)致軸向載荷降低,但此時(shí)法向載荷會(huì)變得非常復(fù)雜[46]。波浪的質(zhì)點(diǎn)運(yùn)動(dòng)會(huì)產(chǎn)生不對(duì)稱(chēng)的壓力分布,尤其是在波峰和波谷位置,但隨著深度增加,質(zhì)點(diǎn)速度迅速衰減,因此隨著航行體不斷深入,這種不對(duì)稱(chēng)現(xiàn)象逐漸消失[50]。而極地冰層的存在,對(duì)于空泡演化會(huì)產(chǎn)生劇烈影響,復(fù)雜的空泡潰滅產(chǎn)生的高壓會(huì)引起強(qiáng)烈的交變載荷,同時(shí)低溫將加快面閉合和深閉合,大大影響航行體表面壓力[51]。
為了研究大尺度航行體高速跨介質(zhì)入水的沖擊載荷形成機(jī)理與分布規(guī)律,哈爾濱工程大學(xué)建造了長(zhǎng)25 m、深14 m、寬7 m的水池,自主開(kāi)發(fā)了基于氣動(dòng)彈射原理的高速跨介質(zhì)入水發(fā)射裝置(如圖11所示),并配有先進(jìn)的光測(cè)和電測(cè)系統(tǒng)以及彈載測(cè)試系統(tǒng),能夠滿足直徑200 mm、速度300 m/s以?xún)?nèi)大尺度航行體模型高速全角度入水試驗(yàn)要求,并配套搭建了高效攔截裝置,可利用高速攝像拍攝水上、水下多視角入水空泡演化和彈道特性(如圖12所示),實(shí)現(xiàn)了電測(cè)與光測(cè)聯(lián)合對(duì)高速跨介質(zhì)入水載荷、空泡、彈道等數(shù)據(jù)的精確測(cè)量。

圖11 大尺度跨介質(zhì)水池及高速跨介質(zhì)入水試驗(yàn)Fig.11 Large-scale water tank and high-speed water entry experiment
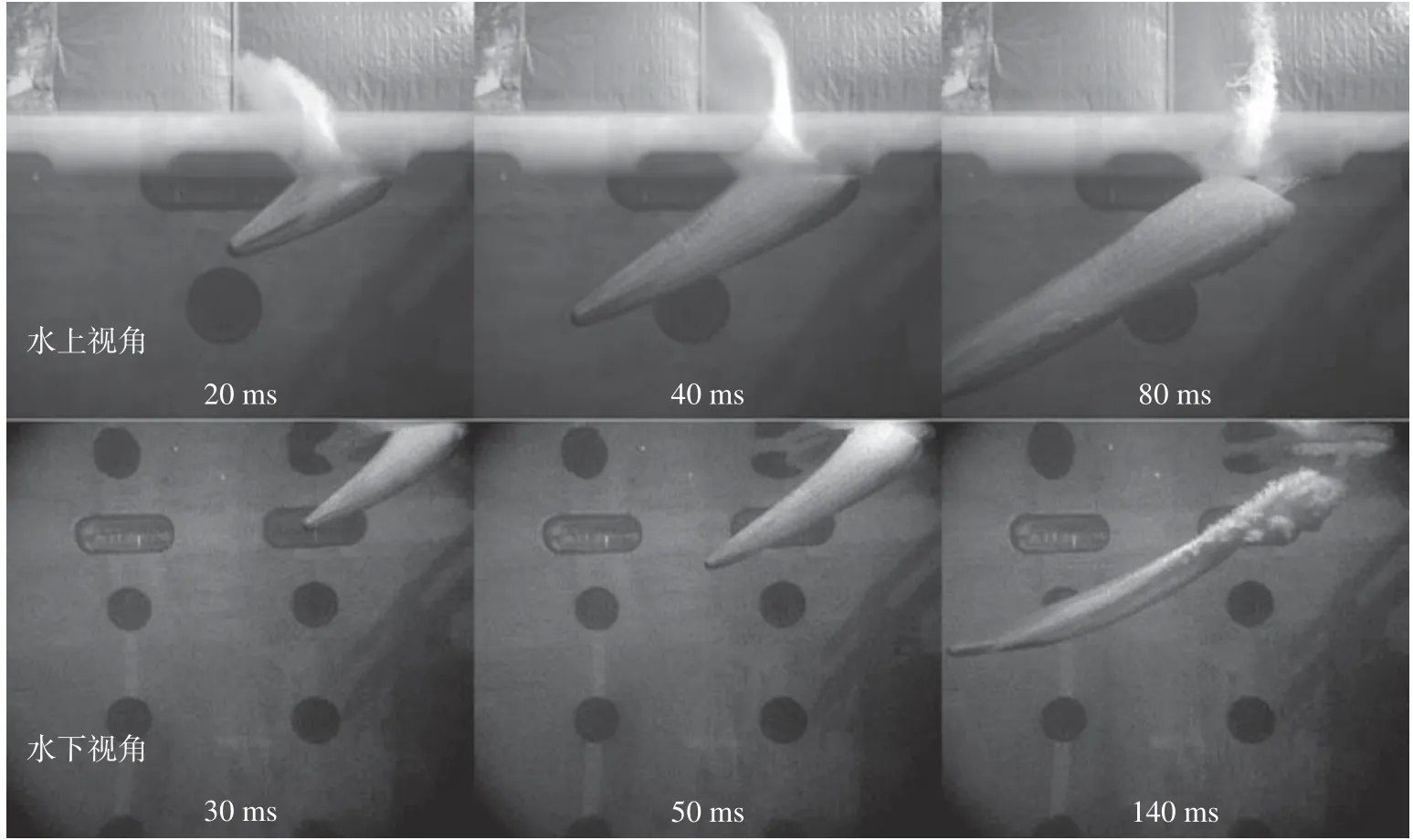
圖12 高速跨介質(zhì)水上、水下視角空泡演化和彈道特性(航行體直徑100 mm,入水速度60 m/s,角度30°)Fig.12 Cavity evolution and ballistic characteristics of high-speed vehicle during water entry in views of above and below water surface(The vehicle has a diameter of 100 m, an incident velocity of 60 m/s, an incident angle of 30 deg )
2.2 尾拍過(guò)程的沖擊載荷特性
尾拍是航行體高速跨介質(zhì)入水后期發(fā)生的重要現(xiàn)象,產(chǎn)生的尾拍載荷常呈現(xiàn)多峰、不連續(xù)特征。對(duì)于水中高速航行體,常通過(guò)兩種假定模型計(jì)算得到尾拍力,包括基于Wagner的圓柱體平面滑行力模型和基于虛擬質(zhì)量法的尾拍力模型。前者通過(guò)將該過(guò)程視為圓柱體侵入圓形液面,從而解得滑行力;后者假設(shè)水流經(jīng)過(guò)尾部后與航行體側(cè)壁平行,通過(guò)動(dòng)量方程解得尾拍力。但是,這些理論在高速跨介質(zhì)入水方向的應(yīng)用并不理想,一些學(xué)者通過(guò)數(shù)值和試驗(yàn)進(jìn)行了相關(guān)研究。周浩磊等采用試驗(yàn)研究了伴隨超空泡的小尺度航行體高速跨介質(zhì)入水的典型力學(xué)現(xiàn)象[52],并指出尾拍會(huì)導(dǎo)致航行體尾部與空泡壁面反復(fù)碰觸,引起角速度突然變化,即“忽撲”。當(dāng)航行體尾拍觸水,軸向和法向載荷迅速增加并產(chǎn)生往復(fù)的、近似周期性的變化,對(duì)航行體后續(xù)運(yùn)動(dòng)姿態(tài)會(huì)產(chǎn)生重要影響[53]。Liu等開(kāi)展了預(yù)置舵角航行體入水尾拍研究,發(fā)現(xiàn)隨著入水速度增大,尾拍頻率增加,尾拍載荷和頻率會(huì)隨著預(yù)制舵角的增加而增大,此時(shí)法向載荷會(huì)是軸向載荷的2.5倍[54],如圖13所示,尾拍載荷可能對(duì)細(xì)長(zhǎng)航行體構(gòu)成嚴(yán)重的威脅。
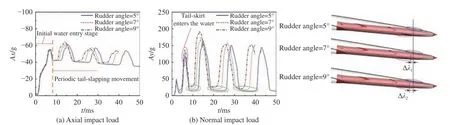
圖13 高速跨介質(zhì)入水尾拍載荷及空泡形態(tài)[54]Fig.13 Tail slamming load characteristics and cavity shapes during high-speed water entry[54]
2.3 跨介質(zhì)入水的降載特性
高速跨介質(zhì)過(guò)程由于介質(zhì)突變,引起的瞬態(tài)沖擊載荷異常突出,對(duì)航行體結(jié)構(gòu)安全和彈道軌跡影響較大,許多學(xué)者進(jìn)行了高速跨介質(zhì)入水的降載研究,常用的降載方法包括采用多孔泡沫緩沖頭帽[55]、彈簧緩沖連接[56]、航行體頭部/側(cè)部通氣[57]、降載空化器(如圖14所示)[58]等。緩沖材料能夠在撞水時(shí)吸收一定的沖擊能量,通過(guò)多層設(shè)計(jì)和預(yù)設(shè)溝槽能夠保證罩殼和泡沫及時(shí)脫離并延長(zhǎng)破壞時(shí)間,有效降低入水沖擊載荷[59]。彈簧緩沖并非總是能夠降低沖擊載荷,這取決于關(guān)鍵因素“水彈性”的影響,其與問(wèn)題的水動(dòng)力和彈性時(shí)間尺度有關(guān)[60]。通氣降載主要是通過(guò)形成超空泡流型,將航行體完全包裹在空泡中,減少航行體沾濕面積,從而降低軸向和法向載荷。但隨著入水速度增大,由于通氣抑制了自然空化,使得航行體不能完全包裹于空泡中,側(cè)面發(fā)生了沾濕,影響了航行體受到的法向沖擊載荷[61]。此外,Elhimer等、Chuang等提出通過(guò)在水池底部曝氣使流場(chǎng)變?yōu)闅庖夯旌狭鳎M(jìn)而降低航行體入水的沖擊壓力[62-63];Korkmaz等通過(guò)試驗(yàn)發(fā)現(xiàn)疏水效應(yīng)改變了結(jié)構(gòu)表面的流動(dòng)分離和飛濺形成,航行體動(dòng)能更多地傳遞給了射流,從而降低了沖擊載荷[64]。這些研究多數(shù)針對(duì)的是跨介質(zhì)入水軸向降載,為跨介質(zhì)航行器的抗沖擊設(shè)計(jì)提供了比較豐富有效的措施,但是目前對(duì)于尾拍載荷降載方法以及如何利用尾拍進(jìn)行流動(dòng)控制的研究仍較為匱乏。
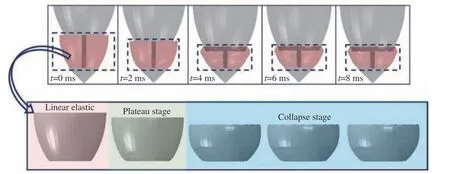
圖14 跨介質(zhì)入水的多級(jí)降載結(jié)構(gòu)[58]Fig.14 Multi-stage load reduction structure applied in high-speed water-entry[58]
3 高速跨介質(zhì)入水航行體運(yùn)動(dòng)穩(wěn)定性與流固耦合響應(yīng)特性
高速跨介質(zhì)入水航行體與流場(chǎng)間存在復(fù)雜的流固耦合作用,在撞擊水面過(guò)程中,由于介質(zhì)突變,強(qiáng)沖擊載荷會(huì)導(dǎo)致航行體局部變形或者破壞,同時(shí)頭部沾濕引起的忽撲力矩,會(huì)導(dǎo)致航行體發(fā)生俯沖、跳飛等彈道不穩(wěn)定現(xiàn)象;在開(kāi)空泡和空泡閉合過(guò)程中,航行體的沾濕狀態(tài)將影響著動(dòng)力載荷的分布,航行體會(huì)發(fā)生尾拍作用,尾拍砰擊力會(huì)引起局部振動(dòng)或損傷,形成的截面彎矩可能造成航行體總體彎曲變形或折斷,整個(gè)入水過(guò)程航行體的流固耦合運(yùn)動(dòng)與結(jié)構(gòu)響應(yīng)異常復(fù)雜,如圖15所示。

圖15 航行體高速跨介質(zhì)入水過(guò)程的瞬態(tài)流固耦合響應(yīng)(航行體直徑324 mm,入水速度100 m/s,角度30°,左圖結(jié)構(gòu)變形放大20倍)Fig.15 Transient fluid-structure interaction response of a vehicle during high-speed water entry (The vehicle has a diameter of 324 mm,an incident velocity of 100 m/s, an incident angle of 30 deg.The structural deformation is enlarged by 20 times at left column )
3.1 航行體運(yùn)動(dòng)響應(yīng)和彈道特性
高速跨介質(zhì)入水過(guò)程受流場(chǎng)的破碎飛濺、氣液流動(dòng)、相變空化等因素影響,可能導(dǎo)致航行體產(chǎn)生俯沖、跳彈、尾拍等劇烈的運(yùn)動(dòng)響應(yīng)[65-66],尤其是小角度斜入水初期結(jié)構(gòu)的沖擊振動(dòng)會(huì)改變自由液面流動(dòng),加劇跳彈現(xiàn)象的發(fā)生,對(duì)航行體的運(yùn)動(dòng)穩(wěn)定性產(chǎn)生重要影響。早期,Park等基于勢(shì)流理論計(jì)算了高速跨介質(zhì)入水彈跳過(guò)程[67],后續(xù)研究發(fā)現(xiàn)航行體水下彈道受入水角度、入水速度、航行體頭部形狀等多種因素影響(如圖16所示)[68]。一般來(lái)說(shuō),具有平整頭部、接近于垂直水面的大角度入水的航行體具有更直的水下彈道,水下運(yùn)動(dòng)姿態(tài)也更為平穩(wěn)。航行體的轉(zhuǎn)平時(shí)間及運(yùn)動(dòng)軌跡也與頭型密切相關(guān),這主要取決于作用在航行體頭部的作用力和力矩,入水速度并不會(huì)改變航行體轉(zhuǎn)平前的軌跡,入水角增加會(huì)導(dǎo)致轉(zhuǎn)平時(shí)間和彈道增長(zhǎng),各參數(shù)之間存在耦合影響[69-70]。此外,黃鴻鑫等研究發(fā)現(xiàn)射彈質(zhì)心靠前有利于提高射彈的入水運(yùn)動(dòng)穩(wěn)定性,但會(huì)增加射彈的尾拍次數(shù)[71]。Sui等研究了跨介質(zhì)入水航行體的運(yùn)動(dòng)軌跡[72],分析了航行體的穩(wěn)定彈道和彎曲彈道形成的流體動(dòng)力學(xué)過(guò)程。Wang等開(kāi)展了具有初始攻角的入水研究,發(fā)現(xiàn)小攻角情況下航行體沾濕后法向載荷趨于零,軌跡相對(duì)較直,但隨著攻角增大,沾濕后航行體受到的法向載荷增大,導(dǎo)致軌跡彎曲,且正攻角會(huì)使尖頭航行體出現(xiàn)向上的軌跡,負(fù)攻角會(huì)產(chǎn)生俯沖運(yùn)動(dòng)[73]。王曉輝等研究了有攻角射彈高速跨介質(zhì)入水的載荷及彈道特性[74],發(fā)現(xiàn)尾拍對(duì)射彈水下載荷和彈道性能有重要影響,指出尾拍是尾翼穩(wěn)定機(jī)制下的一種動(dòng)態(tài)穩(wěn)定運(yùn)動(dòng)形式[75],控制尾拍是實(shí)現(xiàn)航行體高速跨介質(zhì)入水運(yùn)動(dòng)控制的主要手段之一。

圖16 不同頭型航行體入水在同一時(shí)刻的運(yùn)動(dòng)響應(yīng)[68]Fig.16 Motion responses of vehicle with different head shapes at the same time[68]
3.2 航行體入水航行的流動(dòng)控制方法
為了實(shí)現(xiàn)航行體水中運(yùn)動(dòng)姿態(tài)的可調(diào)可控,目前常用的控制方法包括通氣的流態(tài)開(kāi)環(huán)控制和基于舵翼的姿態(tài)閉環(huán)控制[76],如圖17所示。對(duì)于通氣的流態(tài)控制,通過(guò)向空泡內(nèi)通氣調(diào)節(jié)空泡流態(tài),不僅能夠達(dá)到減阻的目的,而且通過(guò)改變通氣參數(shù),能夠延長(zhǎng)空泡生存時(shí)間,擴(kuò)大空泡尺寸,減弱空泡潰滅產(chǎn)生的尾射流影響[77-79],進(jìn)而改善航行體水中航行環(huán)境,如調(diào)節(jié)空化器后方的負(fù)壓區(qū),實(shí)現(xiàn)流動(dòng)控制。對(duì)于水動(dòng)舵翼控制,現(xiàn)有方案更多應(yīng)用于魚(yú)雷和無(wú)人航行器等水下航行階段全沾濕狀態(tài),通過(guò)水動(dòng)舵翼的快速響應(yīng)對(duì)航行體運(yùn)動(dòng)姿態(tài)和軌跡進(jìn)行閉環(huán)控制,使得航行體的穩(wěn)定性顯著增高[80-81];而對(duì)于高速跨介質(zhì)入水階段,由于速度高、時(shí)間短,水動(dòng)舵翼的控制是否及時(shí)有效的相關(guān)研究較少,并且多數(shù)閉環(huán)控制方法僅從理論和數(shù)值兩方面進(jìn)行了研究,很少通過(guò)相關(guān)試驗(yàn)進(jìn)行論證。
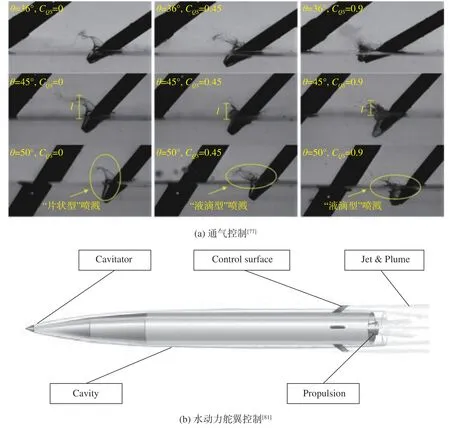
圖17 高速跨介質(zhì)入水流動(dòng)控制方法Fig.17 Flow control method during high-speed water entry
3.3 航行體流固耦合響應(yīng)特性
高速跨介質(zhì)入水是瞬態(tài)的流固耦合作用過(guò)程,流場(chǎng)的強(qiáng)沖擊載荷作用在航行體結(jié)構(gòu)上會(huì)引起局部和總體的彈塑性響應(yīng);反過(guò)來(lái),航行體結(jié)構(gòu)的響應(yīng)也會(huì)改變空泡的演化過(guò)程,航行體變形和破壞會(huì)對(duì)沖擊作用位置、液面飛濺等產(chǎn)生影響,導(dǎo)致流體動(dòng)力載荷改變,如圖18所示,因此流場(chǎng)與結(jié)構(gòu)的作用是實(shí)時(shí)雙向耦合的。
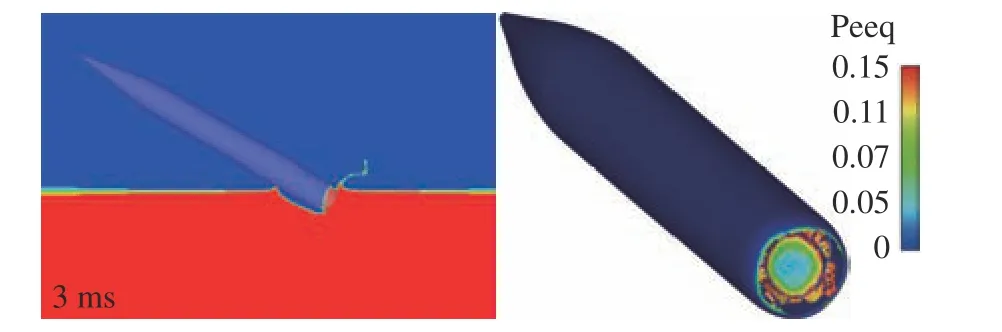
圖18 高速跨介質(zhì)入水航行體局部破壞(航行體直徑324 mm,入水速度150 m/s,角度30°)Fig.18 Local fracture of the projectile during high-speed water entry (The vehicle has a diameter of 324 mm, an incident velocity of 150 m/s, an incident angle of 30 deg )
目前針對(duì)高速跨介質(zhì)入水流固耦合效應(yīng)的研究結(jié)果表明:當(dāng)考慮結(jié)構(gòu)的彈塑性響應(yīng)時(shí),得到的沖擊載荷曲線更為抖動(dòng)且總體上數(shù)值要小于假定剛性體的仿真結(jié)果[82],同時(shí)結(jié)構(gòu)變形將會(huì)影響垂直入水和斜入水過(guò)程中空泡形態(tài)的發(fā)展[83]。許多研究將焦點(diǎn)集中在高速跨介質(zhì)入水的水彈性效應(yīng)、結(jié)構(gòu)響應(yīng)機(jī)理與規(guī)律。施紅輝等、桂蜀旺等基于LS-DYNA的彈塑性本構(gòu)關(guān)系研究了高速跨介質(zhì)入水的沖擊載荷響應(yīng)機(jī)制和應(yīng)力變化規(guī)律[84-85]。李天雄等基于AUTODYN和FLUENT聯(lián)合仿真研究了彈塑性材料射彈高速跨介質(zhì)入水彈道轉(zhuǎn)向的特性[86]。王銘等采用任意拉格朗日-歐拉法(arbitrary Lagrange-Euler, ALE)研究了航行體高速跨介質(zhì)流固耦合機(jī)理[87],分析了結(jié)構(gòu)的彈塑性對(duì)高速跨介質(zhì)入水沖擊載荷的影響及流固耦合響應(yīng)規(guī)律。Chaudhry等基于ALE方法研究了頭部可變形自主式水下潛器(autonomous underwater vehicle,AUV)入水過(guò)程的水彈性效應(yīng),分析了入水沖擊載荷的頻域特征[88]。Zhang等研究表明當(dāng)楔形體彈性較大時(shí),隨著底升角增大結(jié)構(gòu)變形會(huì)更明顯,之后又會(huì)減小;當(dāng)彈性較小時(shí),結(jié)構(gòu)變形會(huì)隨著底升角的增加而減小[89]。Yang等從彈性波在球內(nèi)傳播和沖擊能量吸收兩方面闡述了結(jié)構(gòu)黏彈性對(duì)球的動(dòng)應(yīng)力和自由表面壓力的影響機(jī)制,尤其是高速?zèng)_擊時(shí),結(jié)構(gòu)黏彈性將影響球的變形行為和沾濕面積,當(dāng)剪切模量一定時(shí),可以定性預(yù)測(cè)其影響[90]。Xia等探究了完全封閉圓柱殼和半封閉圓柱殼入水的區(qū)別,發(fā)現(xiàn)完全封閉圓柱殼入水時(shí)上下壁均發(fā)生變形且下壁變形遠(yuǎn)大于上壁變形;半封閉圓柱殼最大受力發(fā)生在上壁中心位置,最大應(yīng)力發(fā)生在邊緣位置,且上壁變形隨著射流沖擊而產(chǎn)生,隨著射流離開(kāi)而恢復(fù),這一現(xiàn)象也導(dǎo)致了其速度發(fā)生周期性地減小和增大[91]。總的來(lái)說(shuō),跨介質(zhì)入水的流固耦合響應(yīng)異常復(fù)雜,與航行體的構(gòu)型、結(jié)構(gòu)參數(shù)和運(yùn)動(dòng)參數(shù)等密切相關(guān)。
4 高速跨介質(zhì)入水的多相流固耦合數(shù)值研究方法
高速跨介質(zhì)入水過(guò)程常伴有自由液面大變形、流體相變、氣液摻雜、運(yùn)動(dòng)界面失穩(wěn)、沖擊振動(dòng)、結(jié)構(gòu)損傷等非線性物理現(xiàn)象。在理論研究方面,受流體壓縮性、強(qiáng)非線性等限制,當(dāng)前的理論推導(dǎo)多數(shù)仍是基于無(wú)黏的勢(shì)流理論,不考慮流體的可壓縮性,而且多數(shù)是針對(duì)簡(jiǎn)單幾何模型的垂直入水,且僅適用于入水速度較低的情況。在試驗(yàn)研究方面,隨著試驗(yàn)條件的發(fā)展已經(jīng)取得了很大的進(jìn)步,但是高速跨介質(zhì)入水的瞬時(shí)、高過(guò)載特性使得試驗(yàn)采用的隨體測(cè)試系統(tǒng)備受考驗(yàn),此外,試驗(yàn)代價(jià)比較昂貴,獲得的相關(guān)數(shù)據(jù)仍非常有限。因此,現(xiàn)階段許多學(xué)者著重發(fā)展了高速跨介質(zhì)入水問(wèn)題的流固耦合數(shù)值方法,根據(jù)問(wèn)題域的離散方法,一般可以分為有網(wǎng)格方法和無(wú)網(wǎng)格方法。
4.1 有網(wǎng)格方法數(shù)值研究
有網(wǎng)格方法是高速跨介質(zhì)入水流固耦合研究的重要方法,Liu等計(jì)及流場(chǎng)壓縮性,建立了多相流的三 維 歐 拉 有 限 元(Eulerian finite element method,EFEM)計(jì)算模型,改進(jìn)了流固耦合浸沒(méi)界面耦合算法,開(kāi)發(fā)了多級(jí)分辨率網(wǎng)格計(jì)算技術(shù),形成了適用于大規(guī)模計(jì)算的高效并行算法,實(shí)現(xiàn)了高速跨介質(zhì)入水流固耦合界面的穩(wěn)健求解[7],探明了頭型對(duì)法向載荷、截面彎矩和尾拍形式的影響規(guī)律,如圖19所示。Zhi等基于耦合的歐拉-拉格朗日(coupled Euler-Lagrange, CEL)方法提出了一種結(jié)合錐形空化結(jié)構(gòu)、內(nèi)置伸縮桿和吸能材料的多級(jí)降載結(jié)構(gòu),并確定了相關(guān)尺寸設(shè)計(jì)[58]。Hong等基于貼體網(wǎng)格法,采用簡(jiǎn)化的五方程描述水氣混合流的控制方程,提出了計(jì)及重力效應(yīng)和軸對(duì)稱(chēng)流的壓力松弛方法,有效模擬了跨介質(zhì)入水可壓縮性的影響,探明了曝氣量對(duì)沖擊載荷的作用規(guī)律[57]。Wu等在邊界元(boundary element method, BEM)方法基礎(chǔ)上,提出了一種完全非線性邊界條件下速度勢(shì)的數(shù)值計(jì)算方法,成功模擬了小球出水、再入水的過(guò)程,結(jié)果表明空泡閉合向上的射流起源于自由面下方局部高壓[92]。但是當(dāng)流體域拓?fù)浣Y(jié)構(gòu)發(fā)生復(fù)雜變化時(shí),例如在空泡面閉合產(chǎn)生尾射流情況下,網(wǎng)格惡化會(huì)給數(shù)值計(jì)算帶來(lái)很大困難。De Rosis和Tafuni提出了一種原創(chuàng)的相場(chǎng)格子玻爾茲曼方法,能夠較好地預(yù)報(bào)水靜力和水動(dòng)力作用,具有穩(wěn)定性好,易于捕捉界面、方便并行等優(yōu)點(diǎn)[93],但在求解三維問(wèn)題時(shí)耗時(shí)較多。Wang等基于有限體積法,引入Kunz空化模型,開(kāi)發(fā)了一種基于壓力的可壓縮多相求解器,探索了空泡內(nèi)部流動(dòng)特性,發(fā)現(xiàn)水平自由表面附近的渦環(huán)處的壓力明顯低于腔內(nèi)其余區(qū)域壓力,其存在有助于空泡閉合,如圖20所示[94]。Jiang等采用交叉黏度方程耦合Schnerr-Sauer空化模型分析減阻溶液中航行體的阻力和空泡形態(tài)、流動(dòng)特性,結(jié)果表明減阻溶液在增強(qiáng)空化和減阻方面具有廣闊的發(fā)展前景[95]。此外,不同的空化模型被應(yīng)用于研究高速跨介質(zhì)入水空化流場(chǎng)的流體動(dòng)力特性[96-98]。目前常用的網(wǎng)格類(lèi)計(jì)算方法、空化模型和湍流模型多數(shù)集成于通用的商業(yè)軟件Star CCM+、FLUENT、LSDYNA、ABAQUS、MSC.DYTRAN、AUTODYN等,這些商業(yè)軟件內(nèi)部的核心算法并不透明,而且由于軟件封裝,缺少足夠的靈活性。此外,由于網(wǎng)格畸變、多相運(yùn)動(dòng)界面處理的困難,有網(wǎng)格方法在高速跨介質(zhì)入水流固耦合問(wèn)題中的應(yīng)用仍存在一些不足。

圖19 基于EFEM模擬不同尾拍形式:(a)上尾拍,(b)下尾拍[7]Fig.19 Different patterns of tail slamming based on EFEM simulation, (a) slam upward, (b) slam downwar[7]
4.2 無(wú)網(wǎng)格方法數(shù)值研究
對(duì)于無(wú)網(wǎng)格方法,例如光滑粒子流體動(dòng)力學(xué)(smoothed particle hydrodynamics, SPH)方法,由于不受網(wǎng)格的約束和限制,拉格朗日粒子性質(zhì)使得其在處理自由液面大變形、飛濺等流固耦合問(wèn)題中具有先天的優(yōu)勢(shì)。為了解決航行體入水的流固耦合問(wèn)題,Sun等提出了δ+-SPH數(shù)值模型與計(jì)算方法[99],并結(jié)合優(yōu)化的自適應(yīng)粒子細(xì)化技術(shù)[100],將該技術(shù)推廣到三維入水問(wèn)題的模擬中[101]。楊松在前人研究基礎(chǔ)上建立了計(jì)及流場(chǎng)壓縮性的流固耦合SPH方法,并實(shí)現(xiàn)了跨介質(zhì)入水多相流動(dòng)問(wèn)題的快速、穩(wěn)定模擬[102]。Zhao等開(kāi)發(fā)了多圖形處理器(graphics processing unit,GPU)多級(jí)分辨率的SPH方法,均衡了各GPU、各線程的負(fù)載,有效提高了計(jì)算效率,研究表明空泡非對(duì)稱(chēng)性隨著入水角度減小而增加,且與航行體頭型有關(guān),但入水速度對(duì)其幾乎沒(méi)有影響(如圖21所示)[103-104]。為了減弱有限計(jì)算域邊界效應(yīng)的影響,Wang等基于阻抗匹配原理,提出了適用于高速流固耦合的新型穿透無(wú)反射邊界條件施加方法[105],消波效果優(yōu)于傳統(tǒng)的海綿層邊界與流出邊界。此外,考慮到黎曼求解器在處理間斷面時(shí)的優(yōu)勢(shì),構(gòu)建了新穎的耗散限制器,建立了改進(jìn)的Riemann-SPH數(shù)值模型,準(zhǔn)確模擬了入水的氣墊效應(yīng)及砰擊載荷[106-107]。其他較多應(yīng)用于跨介質(zhì)入水模擬的無(wú)網(wǎng)格方法還包括:不可壓光滑粒子動(dòng)力學(xué)(incompressible smoothed particle hydrodynamics,ISPH)方法[108]、更新拉格朗日粒子動(dòng)力學(xué)(updated Lagrangian particle hydrodynamics, ULPH)方法[109]、移動(dòng)粒子半隱式(moving-particle semi-implicit, MPS)方法[110]等。此外,采用無(wú)網(wǎng)格方法在模擬流固耦合結(jié)構(gòu)響應(yīng)問(wèn)題時(shí),有兩種常見(jiàn)形式,一種是將無(wú)網(wǎng)格方法和有網(wǎng)格方法耦合,借助于不同方法的優(yōu)勢(shì)求解流固耦合問(wèn)題,例如,Huang等建立了流固耦合方法,采用MPS模擬劇烈的自由液面流動(dòng),采用有限元方法模擬航行體結(jié)構(gòu)的運(yùn)動(dòng)及變形[111];另一種是完全無(wú)網(wǎng)格方法,通過(guò)粒子運(yùn)動(dòng)實(shí)時(shí)更新流固耦合界面和結(jié)構(gòu)變形,可以避免網(wǎng)格更新或重構(gòu)操作,例如,Wang等建立了完全SPH粒子法模擬流固耦合問(wèn)題,克服了壓力震蕩、數(shù)值空洞和拉伸不穩(wěn)定現(xiàn)象[112-113],引入黎曼SPH求解器求解流體動(dòng)力載荷,基于完全拉格朗日SPH模擬結(jié)構(gòu)的變形和破壞,由于具有完全無(wú)網(wǎng)格粒子特性,因此具有較為明顯的優(yōu)勢(shì)。
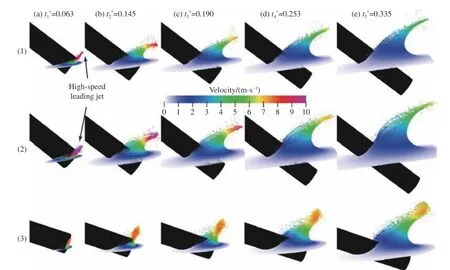
圖21 基于SPH模擬航行體高速跨介質(zhì)入水飛濺現(xiàn)象[103]Fig.21 Simulation of splashing of a projectile during high-speed water entry based on SPH method[103]
4.3 流固耦合分析FSLAB基礎(chǔ)工業(yè)軟件
高速跨介質(zhì)入水的流固耦合作用呈現(xiàn)出復(fù)雜的多相流動(dòng)和非線性的流固耦合特征,雖然目前一些商用軟件已經(jīng)集成了多種數(shù)值方法,但許多代碼并不開(kāi)放,可移植性差,缺乏靈活性。為此,哈爾濱工程大學(xué)開(kāi)發(fā)了具有完全自主知識(shí)產(chǎn)權(quán)的高速跨介質(zhì)入水流固耦合分析FSLAB基礎(chǔ)工業(yè)軟件。該軟件具有完備的前處理、求解器和后處理模塊,如圖22所示,能夠解決高速跨介質(zhì)的復(fù)雜力學(xué)計(jì)算難題,集成了歐拉有限元(EFEM)方法、邊界元法(BEM)、光滑粒子流體動(dòng)力學(xué)(SPH)方法、重構(gòu)核粒子法(RKPM)等多種數(shù)值方法,可實(shí)現(xiàn)億級(jí)網(wǎng)格或粒子的快速并行計(jì)算,突破了當(dāng)前國(guó)外商用軟件的技術(shù)封鎖[114],并且已經(jīng)應(yīng)用于水下爆炸與艦船毀傷及防護(hù)、高速跨介質(zhì)動(dòng)力學(xué)等多個(gè)領(lǐng)域。
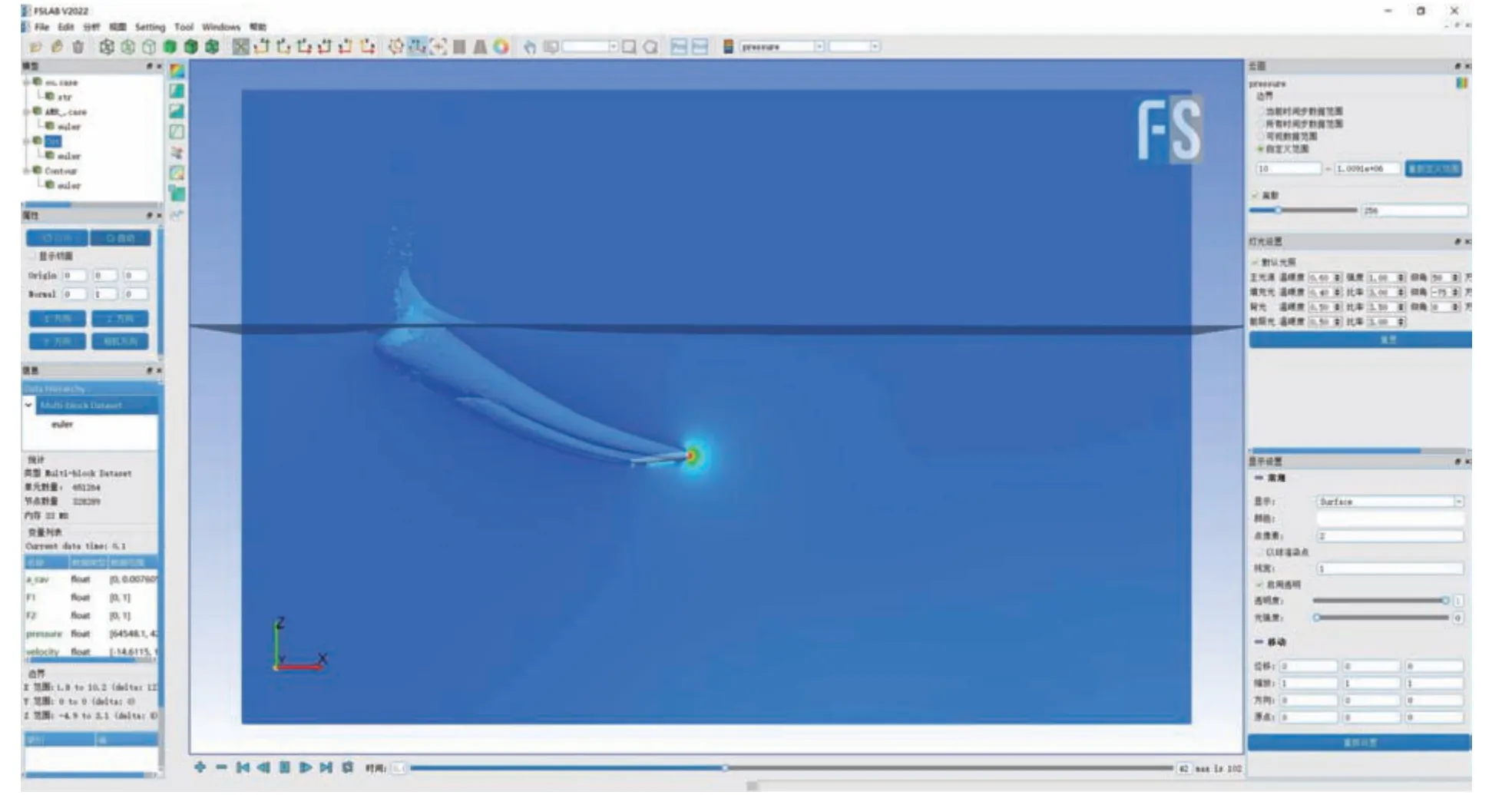
圖22 流固耦合分析的FSLAB基礎(chǔ)工業(yè)軟件Fig.22 FSLAB industrial software for fluid-structure interaction analysis
5 總結(jié)與展望
本文從高速跨介質(zhì)入水的多相流動(dòng)與空泡演化、強(qiáng)沖擊載荷特性與降載方法、運(yùn)動(dòng)穩(wěn)定性與流固耦合響應(yīng)、多相流固耦合數(shù)值方法等方面,分別論述了相關(guān)研究的現(xiàn)狀,總的來(lái)說(shuō),當(dāng)前研究基于理論、數(shù)值和試驗(yàn)方法在高速跨介質(zhì)入水的自由液面破碎和空泡形態(tài)演化、軸向載荷形成規(guī)律及降載、航行體與空泡的耦合作用特性等方面均取得了長(zhǎng)足的進(jìn)步,可為高速跨介質(zhì)入水的載荷預(yù)報(bào)、運(yùn)動(dòng)控制及航行體結(jié)構(gòu)設(shè)計(jì)等提供一定的參考。在后續(xù)研究中,可深入研究的方向包括:
1)在多相流動(dòng)與空泡演化方面:當(dāng)前空泡理論的發(fā)展研究多基于空泡截面的獨(dú)立膨脹理論,且多集中在航行體水下航行過(guò)程,缺少計(jì)及空泡非對(duì)稱(chēng)和自由液面效應(yīng)的空泡理論。此外,高速跨介質(zhì)入水存在復(fù)雜的氣水作用界面,當(dāng)前關(guān)于復(fù)雜海洋環(huán)境對(duì)入水空泡形態(tài)演化、空泡載荷影響機(jī)理尚不清晰,相關(guān)研究比較匱乏。進(jìn)一步地,計(jì)及燃?xì)獾臒嵝?yīng),對(duì)于通氣空泡的演化機(jī)制研究仍不充分。
2) 在強(qiáng)沖擊載荷特性及降載方面:以往的研究焦點(diǎn)多關(guān)注航行體的軸向過(guò)載,但是對(duì)于小角度入水情況,航行體的法向過(guò)載會(huì)異常復(fù)雜,甚至比軸向更為突出,當(dāng)前對(duì)強(qiáng)沖擊下法向載荷規(guī)律的認(rèn)識(shí)仍比較有限,同時(shí)應(yīng)與空泡演化、航行體運(yùn)動(dòng)穩(wěn)定性等建立聯(lián)系,實(shí)現(xiàn)軸向與法向過(guò)載的同步降載。
3) 在運(yùn)動(dòng)穩(wěn)定性與流固耦合響應(yīng)方面:受氣水界面和混合流動(dòng)影響,高速跨介質(zhì)入水航行體的運(yùn)動(dòng)穩(wěn)定性比水中航行更為復(fù)雜,當(dāng)前對(duì)跨介質(zhì)入水航行體的彈體動(dòng)力學(xué)理論、運(yùn)動(dòng)穩(wěn)定性理論研究非常少見(jiàn),關(guān)于高效增穩(wěn)方法仍有待進(jìn)一步發(fā)展;對(duì)于航行體的流固耦合響應(yīng),目前仍需加深對(duì)航行體局部和總體響應(yīng)機(jī)理及模式的探索,提出高效能的抗沖擊構(gòu)型理論與設(shè)計(jì)方法。
4) 在高速跨介質(zhì)流固耦合研究方法方面:航行體跨介質(zhì)入水是強(qiáng)沖擊、強(qiáng)壓縮的多介質(zhì)、多距離尺度、跨時(shí)間尺度的耦合作用過(guò)程,當(dāng)前尚無(wú)完備的數(shù)值研究方法能夠勝任該問(wèn)題的研究,因此需進(jìn)一步發(fā)展有網(wǎng)格、無(wú)網(wǎng)格以及多種方法耦合的數(shù)值方法,解決強(qiáng)間斷、運(yùn)動(dòng)失穩(wěn)界面、多分辨率耦合等計(jì)算難題。在試驗(yàn)研究方面,仍需從強(qiáng)沖擊過(guò)載、相變空化流動(dòng)、結(jié)構(gòu)振動(dòng)及彎折等多個(gè)角度,完善縮比模型試驗(yàn)的相似性理論,并通過(guò)多尺度的模型試驗(yàn)進(jìn)行驗(yàn)證,為高速跨介質(zhì)航行器的構(gòu)型理論發(fā)展和設(shè)計(jì)、研制提供重要的支撐。
猜你喜歡
體育科技文獻(xiàn)通報(bào)(2022年3期)2022-05-23 13:46:54
天津外國(guó)語(yǔ)大學(xué)學(xué)報(bào)(2021年3期)2021-08-13 08:32:18
遼金歷史與考古(2021年0期)2021-07-29 01:06:54
科技傳播(2019年22期)2020-01-14 03:06:54
兒童故事畫(huà)報(bào)(2019年5期)2019-05-26 14:26:14
民用飛機(jī)設(shè)計(jì)與研究(2019年4期)2019-05-21 07:21:24
汽車(chē)工程學(xué)報(bào)(2017年2期)2017-07-05 08:13:02
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長(zhǎng)指南(2015年7期)2015-08-11 15:03:12
