一種5R+異形3RPS的混聯上肢康復機構研究
2024-02-29 09:24:36高云濤汪傳生
機械設計與制造 2024年2期
關鍵詞:康復
梁 輝,王 輝,高云濤,汪傳生,2
(1.青島科技大學機電工程學院,山東 青島 266061;2.青島科技大學山東省高分子材料先進制造技術重點實驗室,山東 青島 266061)
1 引言
根據世界衛生組織的數據,中國的中風發病率居世界首位,中國40 歲以上的研究人群中,有15%的人群面臨中風高風險,并且腦卒中患者都會留下后遺癥,最常見的就是上肢偏癱癥狀[1]。對于患有偏癱癥狀的人群,康復訓練其偏癱的部位是重要的醫療手段,利用外骨骼康復機器人既能解決傳統康復方式對患者的經濟承受力、醫護人員數量、康復效果有局限性的問題,并且提供有效的康復訓練。
目前,在國內外已經有多種康復機構,文獻[2]設計研究了一種上肢外骨骼CADEN-7,康復訓練七自由度,驅動采用繩索牽引。雖然肩關節有三個自由度,可以靈活地康復肩關節,但是它的外部結構是遠離人體的并沒有完全貼合人體上肢,而且腕關節處的偏置問題也有待改進。還有文獻[3]設計的半外骨骼式上肢康復機器人ARMin II,采用電機吊繩驅動,該機器人有七個主動自由度和五個被動自由度,適用于不同患者的要求,但是腕部康復的機構較復雜,康復的靈活性較差。國內的上肢康復機器人的研究比較落后于國外,文獻[4]研究設計了新型上肢外骨骼機構,康復上肢的五個自由度,該機器人可以適應不同身高、損傷程度、患側的上肢偏癱患者并采集患者上肢的肌電信號進行運動辨識,但是腕部可實現的康復自由度較少、功能不完整,整個上肢康復外骨骼結構的運動空間較小。文獻[5]設計研究的第二代七自由度上肢康復外骨骼,在第一代的基礎上肩部增加一個轉動關節,腕部采用滑環機構和3-RPS機構串聯,用氣缸作為執行元件,由于腕部過于靈活增加了部分制動,但腕部的控制位置還是不夠精準。
上肢康復器械[6]在結構方面上,它的外部結構占比不宜過大,要與上肢貼合緊湊;腕部康復也尤為重要,自由度不宜過少,要達到靈活準確和不與患者發生干涉的康復標準。這里研究設計了一款多自由度混聯上肢康復機構,能夠康復訓練腕關節的內收/外展、屈/伸運動、肘關節的屈/伸運動以及肩關節的旋前/旋后、內收/外展、屈/伸運動。
它是由步進伺服電機來提供動力,肩、肘的康復結構簡單有效,腕部通過異形3-RPS并聯機構[7]來有效實現康復,它的球副和齒條的移動副可以較為精準的達到預想位置。
2 上肢康復外骨骼機構方案設計
上肢康復外骨骼機構主要由座椅、控制臺、運動基座、可調節立柱、上肢康復裝置等組成,如圖1所示。在該康復機構中,肩部高度、手臂長度及粗細都可以在一定范圍內進行調節,來滿足不同身高和不同體重患者的需求。此外,該康復機構在每個關節自由度都有機械限位,控制箱中有急停按鈕來確保康復者的人身安全。
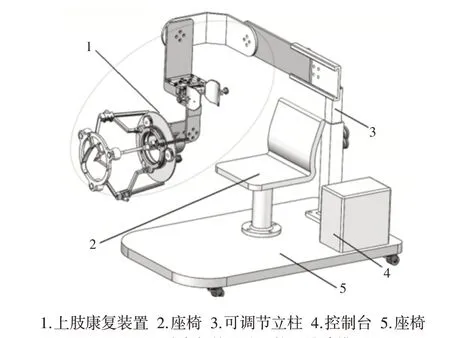
圖1 上肢康復外骨骼機構三維建模Fig.1 Three Dimensional Modeling of Upper Limb Rehabilitation Exoskeleton Mechanism
上肢康復裝置采用5R+3-RPS 的混聯結構,先通過上部的5R 串聯機構實現肩關節(內收/外展、屈/伸、旋前/旋后)、肘關節(屈/伸)、前臂(旋前/旋后)五個自由度的康復訓練運動,再通過異形3-RPS并聯機構實現腕關節(屈/伸、內收/外展)兩個自由度的康復訓練運動,其優勢也在于腕關節康復的異形3-RPS并聯機構可以較好地實現屈/伸、內收/外展的康復運動。根據成年人體尺寸應用原則中的可調性原則[8],設計上肢外骨骼機構的上臂、前臂及肩寬的長度調節范圍分別為(313~331)mm、(235~252)mm、(375~398)mm。各關節自由度在康復訓練中活動范圍要略小于表1 所示的上肢在正常狀態下的活動范圍,防止二次傷害的發生。上肢康復外骨骼機構的最終設計方案,如圖2所示。肩關節康復機構,如圖2(a)所示。肩關節前屈/后伸和外展/內收運動模塊都是電機與法蘭盤螺栓連接輸出帶動支撐板實現的,肩關節旋內/旋外運動模塊是由電機轉軸連接的齒輪與護臂齒輪相互嚙合來實現運動,調整肩關節中心與肘關節中心的距離,以適應不同患者上臂的長度。腕關節康復機構,如圖2(b)所示。它是在3-RPS并聯機構基礎上做出了一定的改變,增大了腕部在機構內部空間的活動范圍和支鏈移動副的行程,解決了患者在康復訓練中人手與并聯機構的干涉問題。肘關節康復機構,如圖2(c)所示。肘關節前屈/后伸模塊也是電機與法蘭盤螺栓連接輸出帶動支撐板實現的,而前臂旋內/旋外模塊是由行星齒輪結構實現的,電機帶動行星小齒輪轉動,從而帶動行星大齒輪實現前臂的旋轉。

表1 康復機構串聯部分各關節桿件參數Tab.1 Parameters of Each Joint of Rehabilitation Mechanism in Series
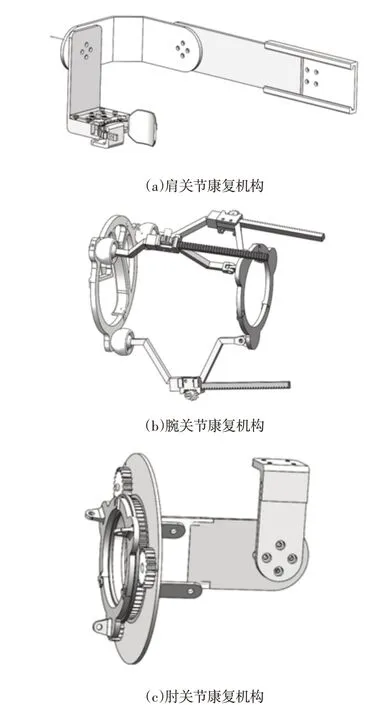
圖2 上肢康復外骨骼結構設計方案Fig.2 Design Scheme of Exoskeleton Structure for Upper Limb Rehabilitation
3 運動學分析
上肢康復外骨骼機構運動學采用分步求解法求解[9],求解步驟分為兩部分,一部分為求解如圖3左邊所示的串聯部分的位姿轉換矩陣及其運動學反解;另一部分為求解異形3-RPS并聯機構組成的腕部康復機構的位姿轉換矩陣[10],如圖3所示。結合前面求得的結果得到在空間中康復機構末端中心點的位姿。

圖3 上肢康復機構坐標系Fig.3 The Coordinate System of Upper Limb Rehabilitation Mechanism
串聯部分:兩相鄰連桿間的關系用四個參數表示,分別是關節角θ,連桿偏距d,連桿長度a以及扭角α。腕部并聯部分:平臺1 的外接圓半徑為R。切線u1、u2、u3與軸線X5的夾角分別是β1=90°、β2=210°、β3=330°。
3.1 上肢串聯部分運動學求解
3.1.1 串聯康復機構位姿轉換矩陣求解
建立上肢康復外骨骼串聯部分的各連桿D-H坐標系,如圖3的左邊部分所示。康復機構的串聯部分D-H坐標系中各個桿件的變量和參數,如表1所示。
串聯康復部分位姿轉換矩陣T1表示為:
最后得到:
3.1.2 上肢串聯康復機構逆解
利用反變換法[11],將可逆變換矩陣依次右乘到式(1)的左右兩邊,反復帶入結果求解得出各關節變量θ(ii=1,2,3,4,5):
3.2 腕部康復機構運動學求解
3.2.1 腕部康復機構位姿轉換矩陣求解
腕關節的3-RPS 并聯機構實現兩個自由度,該機構由上下平臺1、2和三條支鏈構成,每一條支鏈均由轉動副R、移動副P、球副S組成,三條支鏈呈對稱分布[12],如圖4、圖5所示。
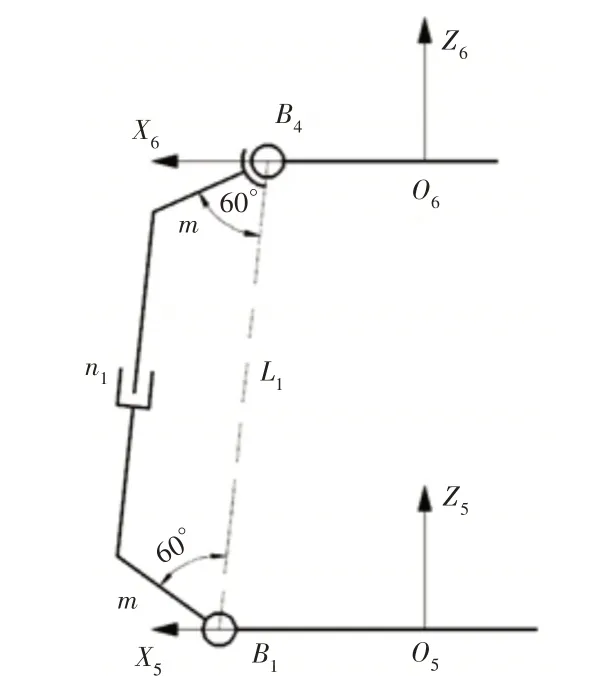
圖4 腕部康復機構平臺1結構簡圖Fig.4 Structure Diagram of Wrist Rehabilitation Mechanism Platform 1
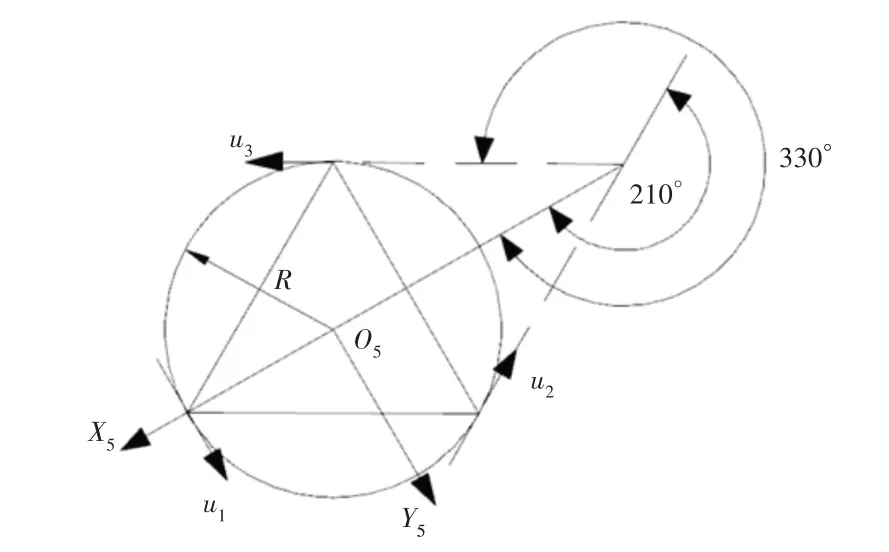
圖5 平臺1轉動副軸線布置方式Fig.5 Axis Layout of Platform 1
平臺1的三個轉動副R的中心在坐標系{5}中位置坐標B1、B2、B3分別是:
設平臺1與支鏈BiBi+3夾角分別為δ(ii=1,2,3),則平臺2的三個球副的中心在坐標系{5}中的位置坐標Bi+3分別是:
平臺2球副中心的間距不變,即:
聯立式(3)和式(4)即可求得δ(ii=1,2,3),求得結果代回式(2),可求得三個球副中心點的坐標。在坐標系{5}中的點O6坐標表示為:
通過式(5)可以得知坐標系{6}的坐標原點O6在坐標系{5}中的位置,坐標系{6}在坐標系{5}中3個坐標軸的方向余弦:
求得坐標系{6}相對于坐標系{5}的變換矩陣:
聯立式(1)、式(7)得到坐標系{6}相對于基坐標系{0}的位姿轉換矩陣:
3.2.2 腕部康復機構逆解
腕部并聯機構平臺2的外接圓半徑為r,則在坐標系{6}中的球鉸中心B4、B5、B6的坐標為:
球鉸中心在坐標系{5}中的位置坐標B4、B5、B6為:
式中:Bk—球鉸中心B(kk=4,5,6)在坐標系{5}空間中的坐標位置。求出三個桿長(關節變量):
4 ADAMS運動仿真
將SolidWorks中建立的多自由度混聯上肢康復外骨骼機構三維建模(如圖1所示)導入ADAMS軟件[13];在軟件中先定義虛擬樣機材料為45鋼和鋁合金,然后對仿真結果進行處理,乘上安全系數,保證結果的準確性,如圖6所示。康復運動的訓練方案設計為兩個階段:第一個階段為前5s內,肩關節做旋前、外展及前屈運動,運動的角度分別為45°、90°及30°,肘關節做后伸運動90°,前臂做旋后運動30°,腕關節做前屈運動;(5~10)s,上肢各部分及關節按原軌跡返回到初始位置。

圖6 上肢康復機構虛擬樣機仿真模型Fig.6 Virtual Prototype Simulation Model of Upper Limb Rehabilitation Mechanism
設定仿真時間為10s,仿真步數為100步,待仿真結束后,末端執行器質心的位移、速度、加速度曲線圖,如圖7~圖9所示。

圖7 末端質心位移曲線Fig.7 Displacement Curve of End Mass Center
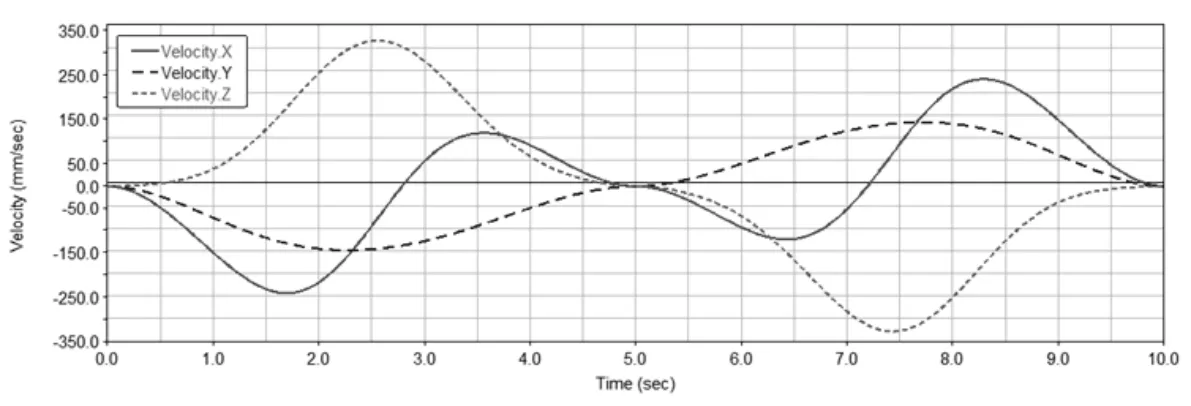
圖8 末端質心速度曲線Fig.8 Velocity Curve of End Mass Center

圖9 末端質心加速度曲線Fig.9 Acceleration Curve of End Mass Center
從圖7~圖9中可以看出,末端質心的位移過渡平穩,速度和加速度曲線沒有發生突變情況,檢驗證明了機構可以按照康復軌跡正確進行并且過渡安全穩定。
5 腕部裝置的實驗探究
5.1 試驗樣機介紹
3D打印加工腕部結構,試驗使用步進電機24-BYJ48和控制器arduino來驅動腕部裝置,并進行組裝調試,腕部康復裝置的試驗樣機實現的功能,如圖10所示。三個步進電機以相同的速度同步轉動,相應的電機運行時間與轉向不同,可以達到不同姿態。

圖10 腕部裝置的試驗樣機Fig.10 Test Prototype of Wrist Device
手腕的前屈姿態,步進電機1正轉,步進電機2、3反轉,如圖10(a)所示。手腕的后伸姿態,步進電機1反轉,步進電機2、3正轉,如圖10(b)所示。手腕的內收姿態,步進電機2正轉,步進電機3反轉,如圖10(c)所示。手腕的外展姿態,步進電機2反轉,步進電機3正轉,如圖10(d)所示。以上四種姿態實現的時間和角度都不同,被測者需要試驗10次,記錄每次每個姿態的實現時間和達到的最大角度,取平均值。
5.2 試驗樣機的檢測及結果分析
試驗的目的是檢測裝置在實際運行中每個姿態能達到的角度范圍以及裝置運行的平穩性和準確性。考慮到電機的供力大、效率高、噪聲低的需求,步進電機的常態轉速設置在20r/min。分別記錄腕部實現各個姿態的時間和實際角度范圍,如表2所示。由表2和試驗過程可知,腕部裝置在實現康復的運行過程比較平穩,沒有速度突變的情況;完成時間也比較符合手腕正常活動的時間;實際的活動角度范圍可達到理想狀態的(73~82)%,可以比較有效的實現康復。
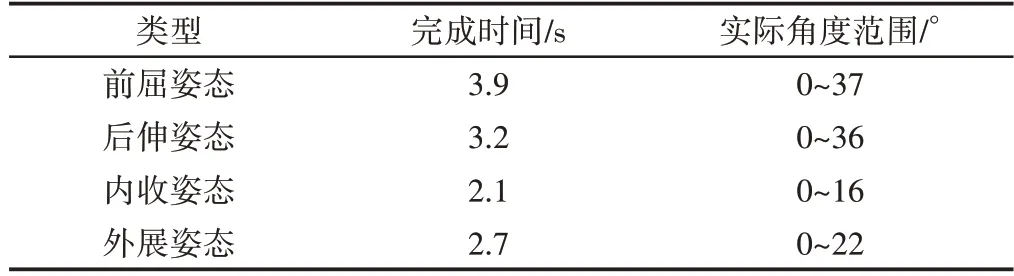
表2 實驗數據記錄表Tab.2 Experimental Data Record Table
6 結論
(1)該研究提出一種5R+異形3-RPS的7自由度混聯康復外骨骼機構,串聯部分康復患者的肩關節與肘關節的五個自由度,并聯部分采用3-RPS結構康復患者手腕的兩個自由度,全面有效地康復患者上肢,該機構有廣闊的市場應用前景。(2)通過對上肢機構的運動學坐標系進行整體分析求解,創新性地將串聯部分與并聯部分結合,為分析上肢康復機構的操作空間和控制方法奠定了基礎。(3)通過ADAMS運動仿真求解出末端質心的軌跡以及末端質心的位移、速度、加速度變化曲線圖,末端質心位置比較平穩的運動,速度和加速度曲線沒有突變情況。但針對其他各個自由度配合的多種姿態的仿真問題,還需要進一步的分析研究,避免突發情況的發生。(4)通過腕部試驗的研究,平均試驗完成時間也比較符合手腕正常活動的時間,實際的活動角度范圍可達到理想狀態的(73~82)%,驗證了該機構可以較為精準、有效的康復訓練。
猜你喜歡
康復(2023年11期)2023-11-20 07:45:54
康復(2023年14期)2023-11-20 06:04:54
中老年保健(2021年4期)2021-08-22 07:08:14
護理與康復(2021年2期)2021-03-05 08:10:44
家庭醫學(下半月)(2020年1期)2020-05-11 02:05:46
廣東醫科大學學報(2020年6期)2020-02-06 06:00:56
特別健康(2018年2期)2018-06-29 06:13:44
反射療法與康復醫學(2017年7期)2017-01-16 01:11:02
中國衛生(2014年6期)2014-11-10 02:30:50
中國中醫藥現代遠程教育(2014年23期)2014-03-01 04:33:45
