融合小波變換與形態學的車身刮痕邊緣檢測
2024-02-29 09:23:34楊智勇劉研奇劉佳豪
機械設計與制造 2024年2期
楊智勇,劉研奇,劉佳豪,繆 陳
(1.湖北工業大學機械工程學院,湖北 武漢 430068;2.中國人民解放軍95997部隊,北京 100071;3.國網湖南省電力有限公司檢修公司,湖南 長沙 410004)
1 引言
隨著汽車成為人們日常出行的常用工具,車身表面的刮痕成為其使用過程中無法避免的問題。目前,車身刮痕檢測較多采用人工目視的方式,以上海大眾汽車廠為例,汽車車身完成上漆后,工人從不同角度通過觀察、觸摸等方式檢測和標記微小瑕疵[1]。該方式漏檢率高、成本高、速度慢,且油漆對工人的健康造成危害。針對該問題,提出一種代替人工的計算機自動檢測方法顯得尤為重要。
車身刮痕檢測包括:刮痕圖像預處理、刮痕邊緣檢測、刮痕識別定位和修復等步驟。
其中,車身刮痕邊緣檢測的準確性直接影響著后續刮痕識別定位精度,一旦邊緣檢測不準確,直接影響刮痕中心線的提取,降低了車身刮痕的定位精度。因此,提升邊緣檢測準確性對于后續刮痕的精確定位十分重要。
抑制圖像噪聲及獲取更多的圖像邊緣特征是邊緣提取的關鍵。傳統的重新啟動、Canny和Sobel等邊緣檢測算法已被廣泛應用于工業圖像檢測領域,但仍存在對噪聲敏感、識別的邊緣不連續、無法辨別邊緣與紋理等問題,故采用傳統的邊緣檢測算法對提取含噪聲的車身刮痕邊緣效果不佳。目前,國內外已有大量學者對含噪圖像邊緣檢測方法開展研究。其中,神經網絡算法、啟發式算法[2]等搜索能力強、定位精度高,但實現成本高且建立模型需大量訓練樣本,效率較低[3];文獻[4]通過小波變換對光照不均圖像進行增強處理,引入神經網絡求解增強系數,該方法雖圖像處理效果好但也增加了計算負擔;文獻[5]提出基于小波變換的邊緣檢測方法,該方法具有一定的抗噪性,但對微弱邊緣的檢測能力不足。文獻[6]提出基于MAS 的小波算法,用于鋼板表面缺陷邊緣檢測,利用尺度區分邊緣的類型,有效提取出鋼板表面缺陷圖像,但同樣對微弱邊緣的檢測能力不足。
小波變換在多尺度分析和時頻局部化方面表現良好,適用于檢測局部突變信號,是濾除圖像噪聲和邊緣檢測的有效工具,廣泛應用于工業邊緣異常檢測中[7]。數學形態學是通過一定形狀、大小的結構元素去檢測和提取圖像中的對應形狀,從而實現對圖像處理與識別的目的,其本質上一種非線性濾波方法,簡化圖像數據的同時也保證邊緣的形狀特性,因此數學形態學能檢測到真正的邊緣且運算效率高[8]。
基于此,提出一種融合小波變換和數學形態學的汽車刮痕邊緣檢測方法,將兩種檢測算法的結果進行融合,得到最終的邊緣檢測結果。
具體包括對兩種算法的檢測結果進行小波分解分別得到邊緣圖像的高頻分量和低頻分量,兩圖像的低頻分量根據能量大小分配權重得到融合后圖像的低頻分量,相對應的高頻分量通過對比其絕對值大小,選擇偏大的作為融合后圖像的高頻分量,將融合的高低頻分量進行重構,得到融合后的邊緣圖像。
2 汽車刮痕邊緣檢測
汽車車身刮痕檢測系統,如圖1所示。主要包括機械臂、攝像頭、光源、機械臂運動平臺和噴漆裝置。其中,4個攝像頭分布于車身的四周,在噴漆房頂部和底部分布專用光源,確保攝像頭采集車身圖片樣本。通過智能算法檢測采集到的車身圖片,獲取車身刮痕的空間坐標,伺服控制搭載有噴漆頭的機械臂末端運動至車身刮痕正上方,執行噴漆操作。
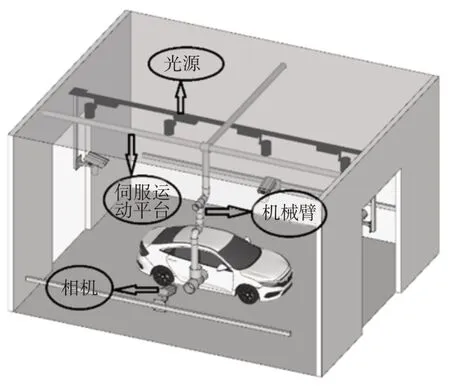
圖1 車身刮痕檢測系統Fig.1 Car Body Scratch Detection System
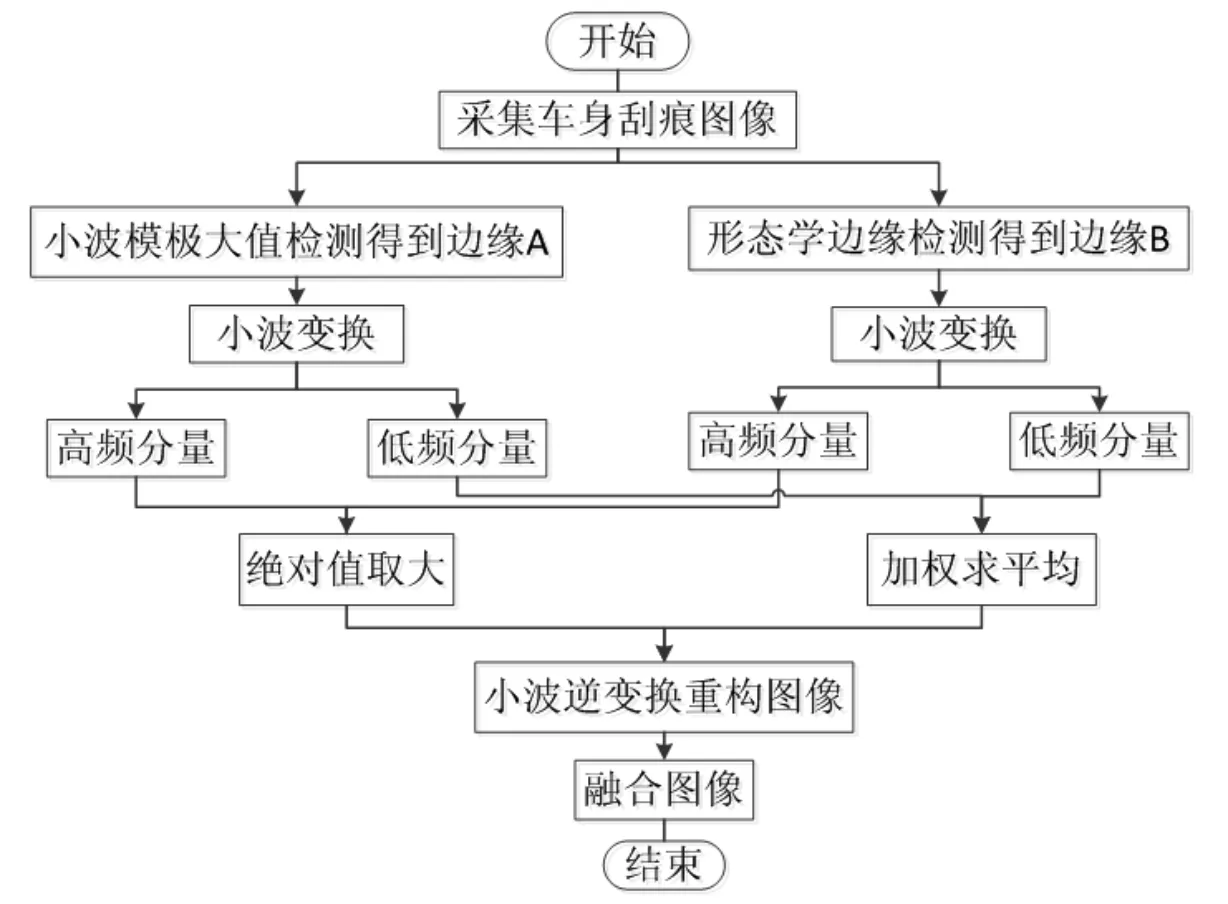
圖2 車身刮痕邊緣檢測流程圖Fig.2 Flow Chart of Car Body Scratch Edge Detection
3 融合小波變換與數學形態學車身刮痕邊緣檢測方法
3.1 小波模極大值圖像邊緣檢測原理
小波變換的實質是信號被平滑函數低通濾波后的導數,小波模極大值法是沿著圖像的梯度方向,在不同尺度下檢測圖像信號,對應點的模極大值會產生相應變換。小波函數對應平滑函數的導數時,由小波模極大值找到圖像的邊緣點[9]。
設θ(x,y)為二維可微高斯平滑函數,具有良好的局部化特征且滿足條件:
設圖像f(x,y)∈L2(R2),平滑函數做卷積運算得到平滑后的圖像:
設ψ(x,y)是θ(x,y)的一階導數,對θ(x,y)在x,y方向上分別求偏導數,得到兩個二維小波變換函數分別為:
因此,當尺度為S時,二進制小波沿著水平和垂直兩個方向分解出來的兩個分量構成了圖像f(x,y)被θs(x,y)平滑后的圖像梯度矢量。
所以梯度矢量的大小為梯度矢量的模:
梯度矢量的方向與水平方向的夾角為相角:
于是,沿著梯度矢量方向的極大值點為刮痕圖像的邊緣點。通過小波變換的邊緣檢測雖能提升噪聲魯棒性,但仍會漏檢很多微弱邊緣,造成邊緣檢測精度較低。為了得到較好的邊緣檢測精度,需要融合更多的邊緣細節信息。
3.2 改進的數學形態學車身刮痕邊緣檢測
數學形態學理論是一種建立在集合論基礎之上的非線性濾波方法,近幾年在圖像處理方面被得到了迅速發展與完善[10-11]。在邊緣檢測方面,采用形態學檢測方法能獲得較好的圖像邊緣連續性。
設f(x,y)為輸入圖像,B(x,y)為結構元素,抗噪型檢測算子如下:
抗噪膨脹型:
抗噪腐蝕型:
抗噪膨脹腐蝕型:
傳統的單結構元素只能檢測出與結構元素同方向的邊緣,無法很好地檢測車身刮痕這種形狀多變的復雜邊緣。
因此,通過反復實驗分析,提出一種多結構元素的數學形態學檢測算子:
定義新的邊緣檢測算子為:
由式(13)將得到的三種抗噪算子分別檢測后做平均運算得到完整邊緣,而式(13)前半部分得到的邊緣圖像細節不豐富,因此在式(13)后半部分迭加上一些邊緣的細節信息,使邊緣更加清晰連續。
當形態學結構元素的方向與邊緣垂直時,才能較好地檢測出各點的邊緣,因此形態學結構元素的方向應與圖像平均梯度方向平行。由于汽車刮痕邊緣形狀不定,選取如下結構元素:B1至B4為4 個(3×3)的方形結構元素,對應的方向角為0°,90°,45°,135°。
圖像中的行和列的增加方向分別為+x方向和+y方向。設φ為圖像平均梯度向量與x軸正方向的夾角。當圖像梯度方向近似與x軸垂直,即取B1最符合;
當梯度方向近似為x方向,即時,取B2最符合;
當梯度方向近似為x軸成方向,即取B3最符合;
當梯度方向近似與x軸成,即π,取B4最符合。
因此,構造的結構元素能滿足大部分邊緣的檢測要求,設刮痕源圖像經過預處理后的灰度圖像為f',分別根據構造的四個結構元素Bi按照新的邊緣檢測算子進行運算,然后將四個運算結果進行加權合成得到邊緣圖像,運算式如下:
3.3 融合小波變換和改進形態學的汽車刮痕邊緣檢測
小波變換能有效濾除刮痕邊緣提取過程中的圖像噪聲,并準確定位刮痕的位置。形態學方法檢測出的圖像邊緣連續性好,能很好表達刮痕邊緣的細節信息。為了充分利用兩種檢測算法的優點,克服單一檢測算法的不足,融合小波變換和形態學這兩種檢測算法的運算結果,減少圖像噪聲干擾,使邊緣細節信息更加清晰,為后續研究提供技術支持。基于小波變換和改進形態學的邊緣檢測流程為:
(1)采集汽車車身刮痕圖像,得到待處理的車身刮痕源圖像樣本。
(2)對源圖像應用多尺度小波變換,利用模極大值法提取刮痕邊緣,得到邊緣圖像A。
(3)應用多結構元素數學形態學邊緣檢測算法,對源圖像提取邊緣得到邊緣圖像B。
(4)設步驟1中得到得圖像邊緣為A(x,y),步驟(2)中得到得圖像邊緣為B(x,y),T(x,y)為融合A,B兩幅圖像后的邊緣圖像。具體融合步驟如下所示:
①分別對兩幅邊緣的圖像進行小波變換,得到高頻和低頻分量。
②計算A,B兩幅圖像低頻帶內的局部區域Q的能量,即將區域內像素點的灰度值平方累加乘以權重。
式中:w(q)—權重;
Q—p的一個領域;
C—像素點的灰度值。
同理計算圖像B的能量S(B,p)。
③根據式(14)計算所得兩圖像的能量S計算匹配度:
匹配度計算中,式(16)計算所得值越接近1代表該點匹配度高。
④設置一個閾值e,定義閾值大小范圍在(0.5~1)之間。如果MAB<e,直接選擇該點能量大的像素灰度值,舍棄其余:
如果MAB>e,根據能量大小分配權重:
高頻分量的融合,如式(19)所示:
式中:HA—邊緣圖像A的高頻分量;HB—邊緣圖像B高頻分量。取HA、HB中絕對值大的作為融合后圖像的高頻分量,定義為HF。分別得到融合圖像的高低頻分量后,通過小波逆變換重構邊緣圖像,得到最后的邊緣融合圖像T(x,y)。
4 實驗仿真與分析
4.1 實驗平臺
為噴漆機器人實驗平臺,如圖3所示。噴漆裝置安裝在噴漆房內,車輛與噴漆房內壁間距約為1m,6R機械臂安裝在XY運動平臺上,通過伺服驅動帶動機械臂到達車身周圍任意位置。機械臂末端裝有噴涂裝置,該裝置包括噴槍、噴壺、連接件等。噴漆房內分布多個D65光源的(明亮度為(800~1000)lux)燈箱,保證光照充足的同時減少車身表面的反光,保證采集到的圖像能滿足計算需要。
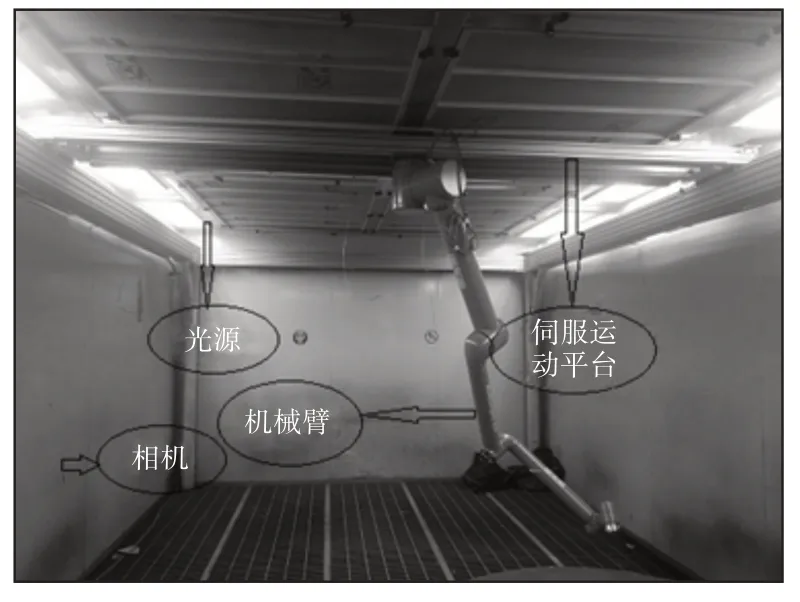
圖3 噴漆機器人實驗平臺Fig.3 Experimental Platform of Painting Robot
4.2 算法評估
為評價所提出算法是否合理,需要驗證該算法對車身刮痕邊緣檢測的有效性并對檢測結果進行評估。評價指標包括查準率Precision、查全率Recall 以及綜合評價指標F-measure,Fmeasure是Precison和Recall的加權調和平均[12]:
式中:P—Precision;R—Recall;F—F-measure。
在實驗中,通過融合算法對1000個車身刮痕數據集樣本進行了測試,測試效果,如圖4所示。各項評價指標的精度均能穩定分布在80%左右,由此驗證了融合算法針對車身刮痕邊緣提取的有效性。
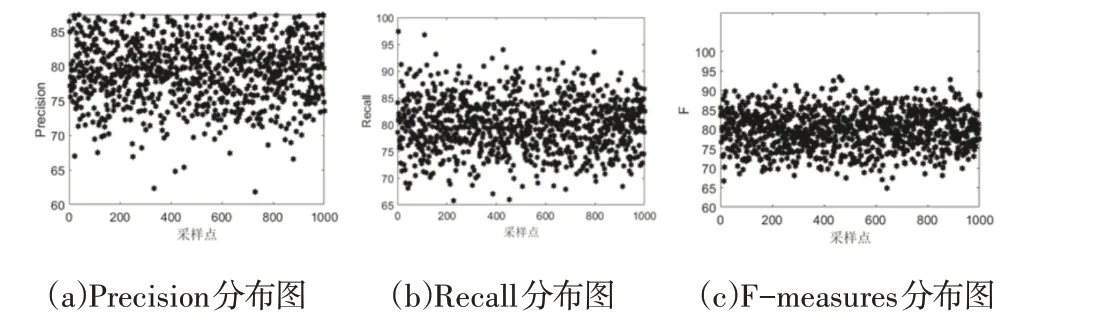
圖4 刮痕檢測效果Fig.4 Effect of Scratch Detection
融合算法對車身蓋板、汽車翼子板與車門處的刮痕邊緣檢測結果,如圖5(a)~圖5(c)所示。分析可知:通過提出的小波變換與形態學融合算法進行檢測,得到的刮痕邊緣圖像的輪廓連續、清晰,且目標刮痕的邊緣能從整體的車身背景中被檢測出來,3類場景中的刮痕邊緣在亮度和邊緣保持度上都符合人眼視覺,表明本檢測系統通過融合算法在針對車身不同部位的刮痕進行邊緣檢測時,對車身不同部位刮痕的檢測效果良好,算法具有一定的魯棒性,能達到檢測時所需的預期效果,不僅很好地排除了背景的干擾,分離出了目標刮痕邊緣,也保證了圖像的完整性。
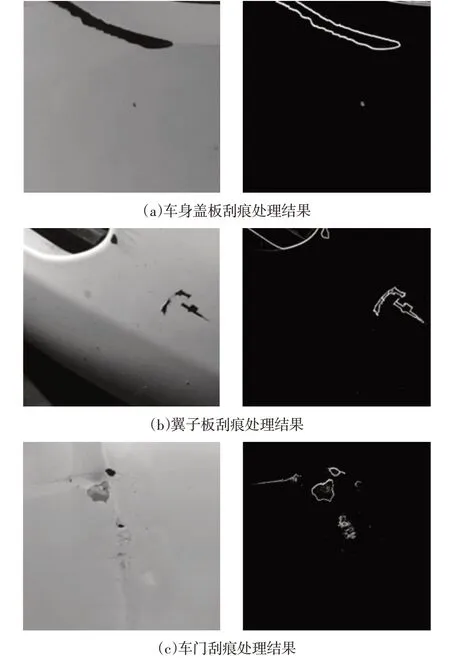
圖5 不同部位刮痕融合算法處理結果Fig.5 Scratch Fusion Algorithm Processing Results of Different Parts
不同算法對車身同一處刮痕的邊緣檢測結果,如圖6所示。分析可知:傳統的邊緣檢測算法對噪聲比較敏感,且邊緣不夠連續。單一的小波模極大值邊緣檢測算法能有效降噪,但也存在邊緣信息不夠豐富的缺點,而采用改進的形態學邊緣檢測方法確保了邊緣的連續性。融合算法很好地解決了噪聲問題的同時,也保留了刮痕的有效邊緣信息,保證了汽車邊緣的連續性,為后續的檢測工作提供了支持。
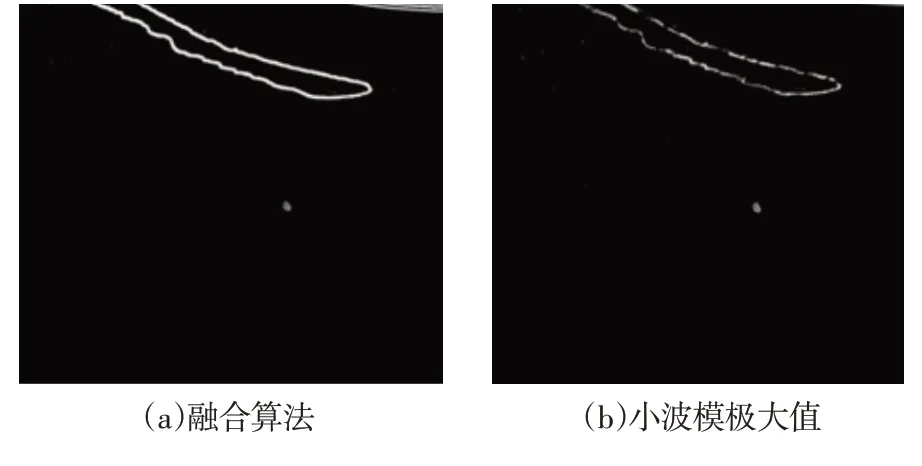
圖6 不同算法邊緣檢測結果Fig.6 Different Algorithm Edge Detection Results
為了定量分析不同算法檢測結果的好壞,選擇信噪比SNR和峰值信噪比PSNR衡量圖像處理質量的好壞。通過手動向車身蓋板處的刮痕源圖像中加入3%的椒鹽噪聲,為了定量分析不同算法對車身含噪圖像的邊緣檢測結果。含噪圖像通過不同邊緣檢測算法處理后的PSNR和SNR值,如表1所示。傳統的邊緣檢測算法結果,如表1 所示。其SNR 均低于5dB,PSNR 也低于20dB,改進后的形態學算法對刮痕邊緣的處理結果相比于傳統的形態學算法,均有3dB的提升。而融合了小波模極大值后的融合算法,相比于單一的改進形態學算法,處理結果的PSNR 和SNR 均進一步提升了約2dB。從柱狀圖描述分析可知,從左至右,不同算法的SNR與PSNR值均保持遞增狀態,證明了從左到右各算法的對車身刮痕的邊緣檢測效果逐漸改善,融合算法的處理效果最佳,如圖7所示。依次對圖像添加不同濃度的噪聲后結果,如表2所示。
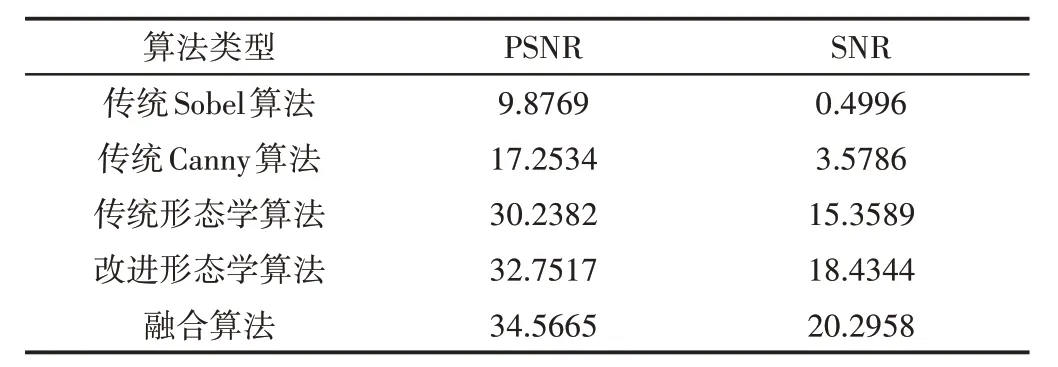
表1 不同邊緣檢測算法PSNR、SNR值Tab.1 PSNR and SNR Values of Different Edge Detection Algorithms
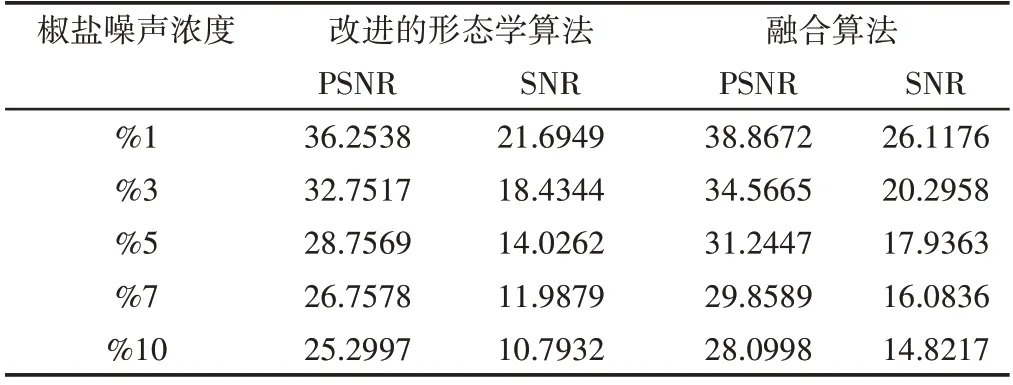
表2 不同濃度下PSNR、SNR值Tab.2 PSNR and SNR Values at Different Concentrations
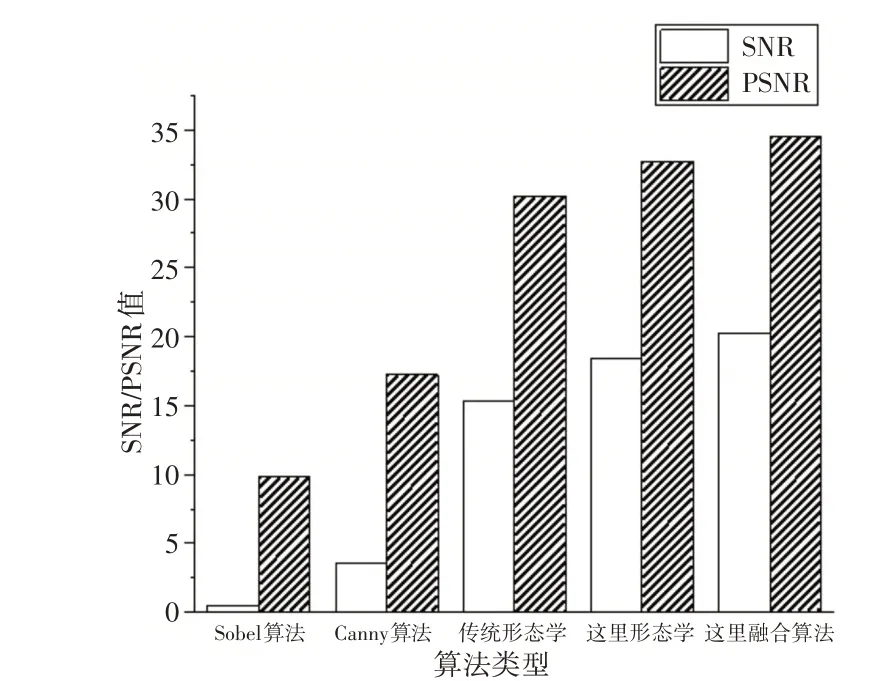
圖7 不同邊緣檢測算法PSNR、SNR柱狀圖Fig.7 Different Edge Detection Algorithms Histogram of PSNR and SNR
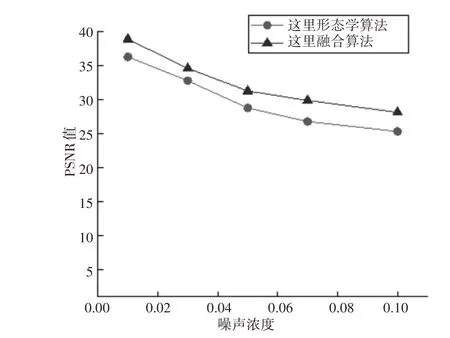
圖8 不同噪聲PSNR變化曲線Fig.8 PSNR Curve of Different Noises
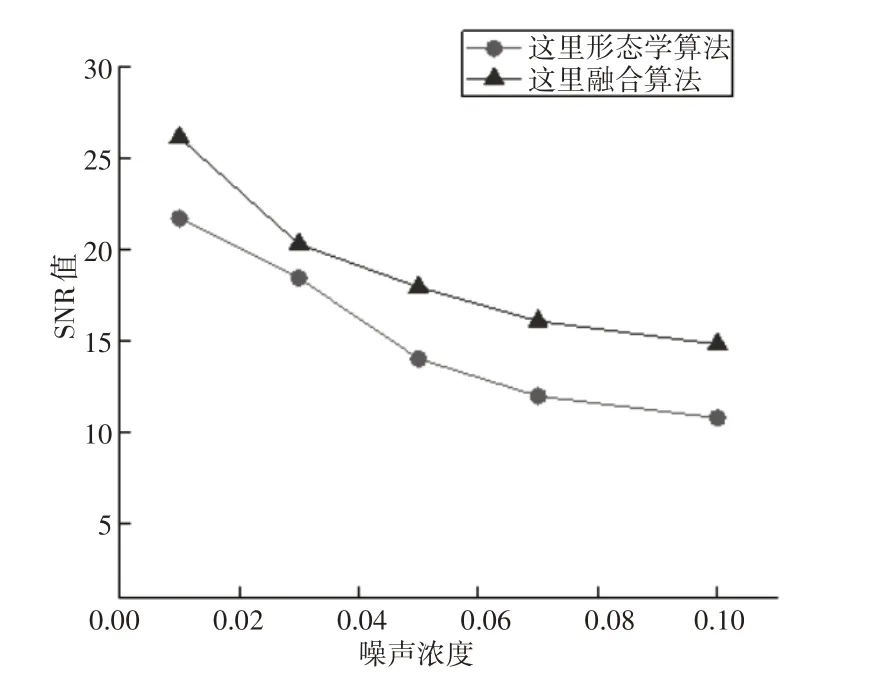
圖9 不同噪聲SNR變化曲線圖Fig.9 SNR Curve of Different Noises
依次對圖像分別添加(1~10)%的噪聲,從相應的PSNR 和SNR值曲線變化來看,隨著噪聲濃度的增加,二種算法的相應數值均保持穩定降低,隨著噪聲濃度從1%增加至10%的,二者的PSNR與SNR值均大約只降低了15dB且沒有發生曲線的驟升和驟降,表明這兩種算法在處理含噪的車身刮痕圖像時,表現穩定,算法具有很好的魯棒性。從二者的曲線變化圖進一步分析,改進的形態學算法和融合算法在刮痕的邊緣檢測上,針對不同的噪聲濃度時,融合算法的PSNR和SNR值均高于改進的數學形態學算法,進一步說明了融合算法對車身的刮痕邊緣檢測效果優于改進的形態學算法。
5 結論
針對車身刮痕圖像檢測中因為噪聲的存在使得車身刮痕邊緣檢測不清晰的問題,提出一種基于小波模極大值和數學形態學的邊緣檢測算法。該算法將小波模極大值邊緣檢測法和經過改進的形態學邊緣檢測算法相結合。在傳統形態學基礎之上,引入了抗噪邊緣檢測算子,并進一步優化,同時引入不同方向的結構元素。算法通過小波變換將兩種邊緣檢測算法得到的結果進行分解分別得到其圖像的高低頻分量,兩圖像低頻分量根據圖像能量大小分配權重進行融合,高頻分量通過對比絕對值大小,取二者中較大值作為融合后圖像的高頻分量,然后通過小波逆變換重構融合后的高頻和低頻分量,得到最終的刮痕邊緣融合結果。通過對比分析可知,融合算法對提高圖像信噪比,增強圖像邊緣連續性有效果明顯。雖提出的融合算法在邊緣檢測的結果中表現不錯,但仍有進一步提升的空間。考慮在未來的研究中,尋找出小波的最優分解尺度并提出更多的數學形態學結構元素,使得邊緣更加清晰連續,因此需要繼續改進方法,并進行量化分析。
猜你喜歡
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
今日農業(2021年19期)2022-01-12 06:16:36
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中老年保健(2021年11期)2021-08-22 03:15:44
中學生數理化(高中版.高考數學)(2021年1期)2021-03-19 08:28:38
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
無線電工程(2020年11期)2020-10-29 01:25:46
