四驅電動汽車變附著路面行駛操穩性控制研究
2024-02-29 09:23:30顧柳恒
機械設計與制造 2024年2期
關鍵詞:控制策略
顧柳恒,張 軍
(北京理工大學機械與車輛學院,北京 100081)
1 引言
四輪驅動電動汽車由于具有四輪轉矩可按任意比例精確調節、且快速響應的優勢,增強了其利用直接橫擺力矩控制提高操縱穩定性的能力,因此獲得了人們的廣泛關注[1]。一般來說,四輪驅動電動汽車的操穩性控制策略通常采用分層控制結構:上層控制器根據駕駛員輸入及理想模型計算出期望的動力學參數,再根據反饋的動力學參數計算所需要的廣義控制力,即縱向牽引力和附加橫擺力矩等;下層控制器負責將廣義控制力按照一定的規則,以各驅動電機和制動器驅動/制動等形式分配給四個車輪[2]。
國內外學者都已做過許多有關操縱穩定性控制的研究,文獻[3]通過分析質心側偏角-質心側偏角速度相圖計算車輛極限穩定車速,以車速作為控制開關進行操穩性控制。文獻[4]結合了橫擺力矩控制與四輪轉向,基于滑模控制算法設計控制策略,提高了車輛在高速工況下的操縱穩定性。文獻[5]設計了一種基于模糊滑模的控制策略,通過模糊控制理論對變結構增益參數實時調節,削弱了傳統滑模控制造成的抖振現象。文獻[6]設計了以輪胎利用率和縱向驅動力最優為目標的分配算法,在保證行駛穩定性為前提的條件下盡可能提高車輛的驅動性。文獻[7]在轉矩分配算法后增加了滑移率模糊控制器,根據滑移率與理想滑移率的差值及變化率計算滑移率調整力矩并附加到最終分配力矩中,避免了滑移率過大導致的失穩現象。傳統的控制方法通常采用路面峰值附著系數且將其定義為一個固定值來進行計算,在附著狀態良好的情況下,這些控制方法具有良好的控制效果。但當車輛部分或所有車輪處于低附路面,或由于滑移率過大導致附著系數偏離路面峰值附著系數時,傳統的控制策略將達不到理想的控制效果,甚至發生失穩的風險。
因此建立考慮路面附著系數影響的四輪驅動電動汽車操縱穩定性控制策略,在上層控制器中充分考慮了附著系數大小對車輛操穩性控制造成的影響,通過判斷車輛行駛危險程度決定控制變量的權重;在下層控制器中除考慮附著系數影響外,還集成有滑移率控制算法,當滑移率超出最佳滑移率時加以控制,防止因滑移率過大導致的附著利用率降低。
2 四輪輪轂電機驅動電動汽車操縱穩定性控制策略設計
所提出的四輪輪轂電機驅動電動汽車操穩性控制策略采用分層控制,如圖1所示。共分為三層結構,分別為參考模型層、上層控制器和下層控制器。參考模型層根據駕駛員輸入,結合車輛的理想模型以及附著狀態,計算期望的質心側偏角、橫擺角速度等車輛動力學參數;上層控制器由速度追蹤控制器、橫擺力矩控制器和滑移率控制器組成,計算廣義控制力,即總縱向力、附加橫擺力矩以及滑移率調整力矩;下層控制器負責將廣義控制力以驅動/制動力矩的形式分配給四個驅動電機和制動器,其中包括以輪胎利用率最優為目標的分配算法和集成滑移率控制的分配算法,按滑移率進行切換。
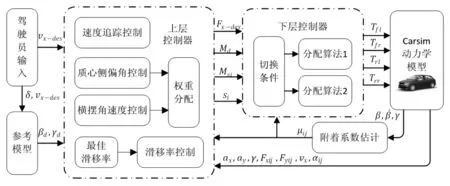
圖1 操縱穩定性控制策略Fig.1 Handing Stability Control Strategy
2.1 參考模型層
為了得到期望的動力學參數,使用理想的線性二自由度模型作為參考模型,即忽略車輛的垂直、側傾和俯仰運動,只考慮橫擺運動和側向運動兩個自由度,并假設縱向速度保持不變,如圖2所示。
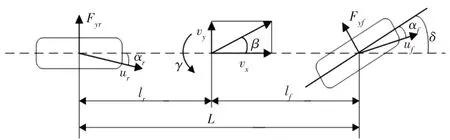
圖2 線性二自由度模型Fig.2 Linear 2-DOF Model
其動力學方程可表示為:
式中:m—整車質量;vx—縱向車速;β—質心側偏角;γ—橫擺角速度;Fyf,Fyr—前軸、后軸側向力;lf,lr—質心至前后軸距離;Iz—車輛橫擺轉動慣量;δ—車輪轉角。
由于車輪轉角較小,令cosδ≈1、sinδ≈0,并假設輪胎處于線性區域內,即輪胎側偏剛度恒定。此外,由于參考模型層的目的是得到期望的車輛質心側偏角、橫擺角速度的參考值,該參考值可以根據二自由度模型獲得。忽略其動態響應過程,令=0、=0,整理出車輛穩態二自由度方程為:
式中:Cf、Cr—前、后軸側偏剛度;vy—側向速度。
由二自由度模型推導出質心側偏角的參考值βd和橫擺角速度的參考值γd為:
式中:L—車輛軸距;K—穩定性因數:
考慮到路面附著條件,車輛的橫擺角速度應滿足的限制為:
式中:μ—路面附著系數。
為保證車輛的可控性,質心側偏角的限制由經驗公式計算得出[8]:
綜上,質心側偏角和橫擺角速度的最終期望值βdes、γdes可表示為:
2.2 上層控制器
上層控制器由速度追蹤控制器、橫擺力矩控制器和滑移率控制器組成,其中速度追蹤控制器計算期望的總縱向力,橫擺力矩控制器根據當前車輛狀態和路面附著條件,計算期望的總附加橫擺力矩,滑移率控制器基于各車輪當前滑移率和最佳滑移率,計算各個車輪的滑移率調整力矩。
2.2.1 速度追蹤控制
速度追蹤控制器的作用是計算車輛所需的總縱向力,采用PID控制,表示為下式:
式中:ev—目標車速與當前車速的偏差;
Fx—計算出的所需總縱向力;
kp、ki、kd—PID控制器參數。
2.2.2 橫擺力矩控制
橫擺力矩控制器的作用是計算車輛所需的附加橫擺力矩,由于車輛的質心側偏角和橫擺角速度相互耦合,追蹤單一狀態量時無法兼顧車輛的操縱性和穩定性。
因此結合β-dβ相圖[9]以及路面附著系數,提出車輛行駛危險程度系數k,實現對質心側偏角和橫擺角速度的分權重控制,同時兼顧操縱性和穩定性,計算出的總附加橫擺力矩表示為下式:
式中:M—最終計算出的總附加橫擺力矩;Mβ、Mγ—追蹤理想質心側偏角和理想橫擺角速度時所需的附加橫擺力矩,計算方法和Fx相同,采用PID控制。
k的值由模糊控制器決定,模糊控制的輸入為|β+Edβ|和路面附著系數μ,模糊變量設置為NB、NM、NS、Z、PS、PM、PB,表示從負大到正大,分別對應β-dβ相圖計算結果X的由大到小,以及路面附著系數的由小到大,模糊邏輯控制規則,如表1所示。
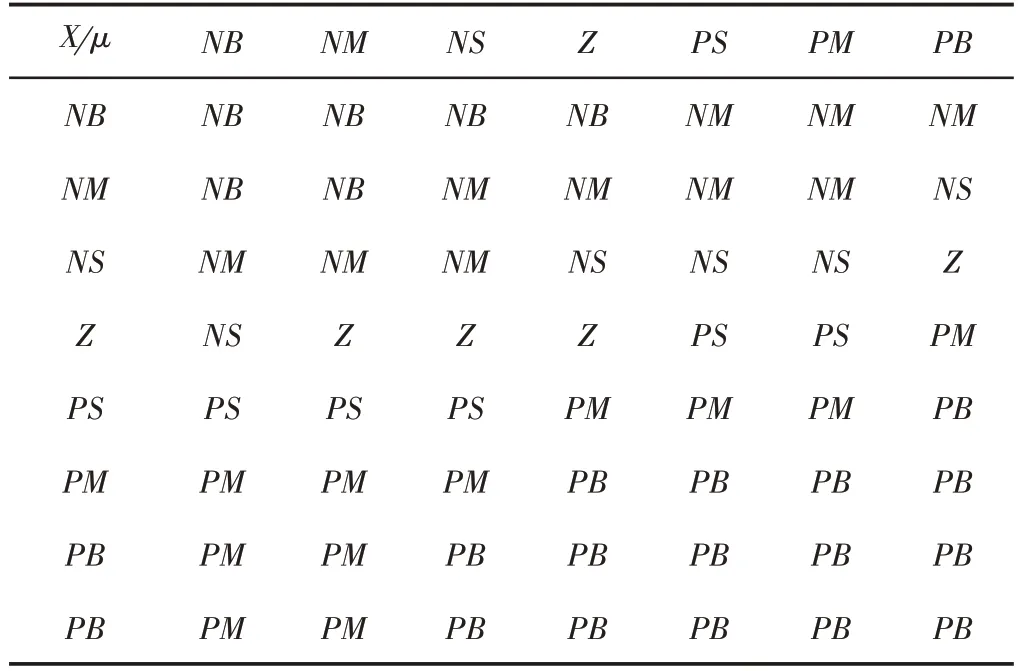
表1 模糊控制規則Tab.1 Fuzzy Control Rules
2.2.3 滑移率控制
車輪滑移率對于路面附著系數、輪胎最大縱向及側向力有重要的影響,為了提高車輛的行駛穩定性,車輪滑移率應控制在最佳滑移率附近,最佳滑移率受路面附著情況、輪胎側偏角和車速的影響,可以表示為下式[10]:
式中:sp0—純直線行駛,車速為64km/h時路面峰值附著系數對應的滑移率,取0.15;α—輪胎側偏角。
滑移率控制器使用模糊控制算法,控制規則和橫擺力矩控制類似,輸入為各輪滑移率與最佳滑移率的差值及差值變化率,輸出為各輪的調整力矩。
2.3 下層控制器
下層控制器的作用是將上層控制器計算出的廣義控制力在滿足各種約束的條件下,以驅動/制動力矩的形式,分配到各個車輪驅動電機和制動器,為了提高附著利用率,在下層控制器中設計了兩種轉矩分配算法,并根據滑移率的大小相互切換,如圖3所示。
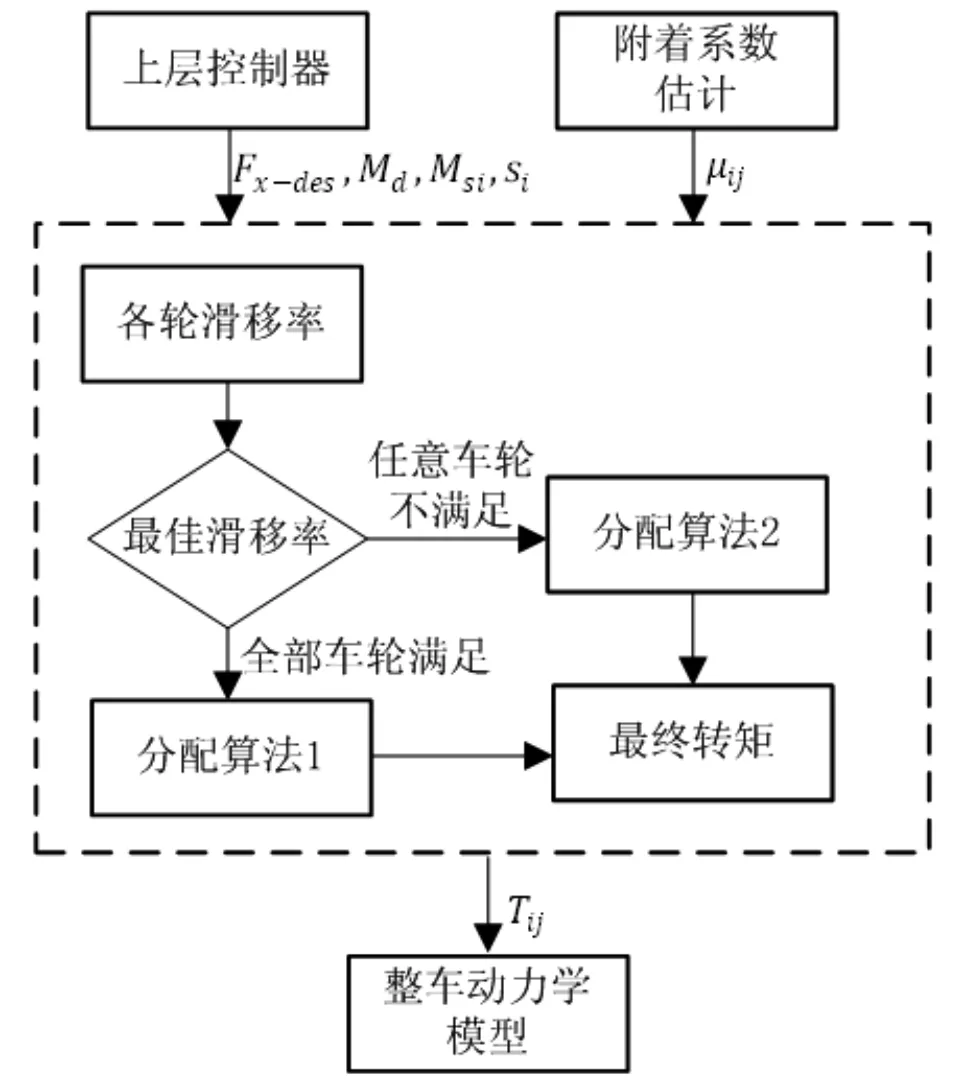
圖3 下層控制器策略Fig.3 The Lower Controller Strategy
2.3.1 切換條件
考慮到控制強度與計算復雜度,若全時進行滑移率控制,不利于廣義控制力的追蹤,且滑移率控制器會影響到控制算法的實時性。因此確定力矩分配算法切換條件:當全部車輪當前滑移率小于最佳滑移率時,采用一般的分配算法,否則采用包括滑移率控制的分配算法,分別稱為分配算法1和分配算法2。
2.3.2 分配算法1
第一種分配算法采用最優控制,以四輪輪胎利用率之和作為優化目標,輪胎利用率越小,代表各輪穩定性程度越高:
式中:Fxi—各輪縱向力;Fyi—各輪側向力;Fzi—各輪垂向力;μi—各輪附著系數;i(i=1,2,3,4)—分別表示左前輪、右前輪、左后輪和右后輪。
分配算法應使實際執行力矩與上層控制器中計算出的廣義控制力相符,設置控制目標等式約束如下式:
式中:Fx—期望的縱向力;M—期望的橫擺力矩;a—質心至前軸的距離;b—車輛的輪距。
車輛在行駛過程中,輪胎縱向力和側向力應滿足摩擦圓公式,摩擦圓約束表示為不等式的形式:
此外,車輪所能提供的轉矩受電機和制動系統輸出能力的限制,表示為:
將式(12)、式(13)合并,可表示為如下形式:
同時,為了降低對輪胎側向力的觀測要求,使用HSRI輪胎模型,以輪胎縱向力表示側向力:
式中:Cαi,Csi—各輪側向和縱向輪胎剛度,根據魔術公式輪胎模型擬合得出;αi—各輪側偏角;si—各輪滑移率。
修改不等式約束公式:
修改優化目標如下式:
使用MATLAB非線性優化函數中有效集法進行求解。
2.3.3 分配算法2
第二種分配算法與第一種類似,同樣采用最優控制,并在第一種分配算法的基礎上增加了滑移率調整力矩,為了減少約束強度,將第一種分配算法中的等式約束以懲罰函數的形式增加到優化目標中,優化目標修改為下式:
式中:ξ—廣義控制力的跟蹤誤差權重系數;
W—縱向力和橫擺力矩的控制權重矩陣。
根據附著條件及質心側偏角調整權重矩陣W的參數,可以兼顧不同行駛工況下的操縱穩定性需求。
第二種分配算法考慮滑移率的控制,當某一車輪的實際滑移率絕對值超出切換條件中規定的最大滑移率絕對值時,該車輪轉矩將直接調整為前一時刻的轉矩與滑移率控制轉矩之和。將其表示為等式約束的形式:
式中:si—滑移率調整開關,當某一車輪滑移率絕對值超出切換條件時,其值為1,否則為0;Fsi—車輪最終輸出的縱向力。
不等式約束與第一種分配算法相同,同樣使用非線性優化函數進行求解。
3 仿真驗證
為驗證所設計的控制策略在四輪驅動電動汽車于變附著系數路面行駛時的有效性,包括路面峰值附著系數的變化及各車輪附著利用率的變化,基于Simulink-Carsim 的聯合仿真平臺設計了對開路面雙移線行駛工況對控制策略進行仿真驗證。其中左側道路附著系數為0.2,右側道路附著系數為0.8,車輛的目標速度設置為100km/h,車輛部分參數,如表2所示。車輪轉角,如圖4所示。車輛先在右側高附道路上行駛,轉向后,第2.8s左側車輪進入低附路面,隨后第4.2s再次完全進入高附路面。該工況模擬了車輛在變附著系數路面的高速危險行駛狀態。為了驗證控制策略效果,將所提出的考慮附著系數的操穩性控制策略與傳統的轉矩平均分配控制策略進行比較,仿真結果,如圖5所示。各車輪實時附著系數由無跡卡爾曼濾波算法估計[11]。
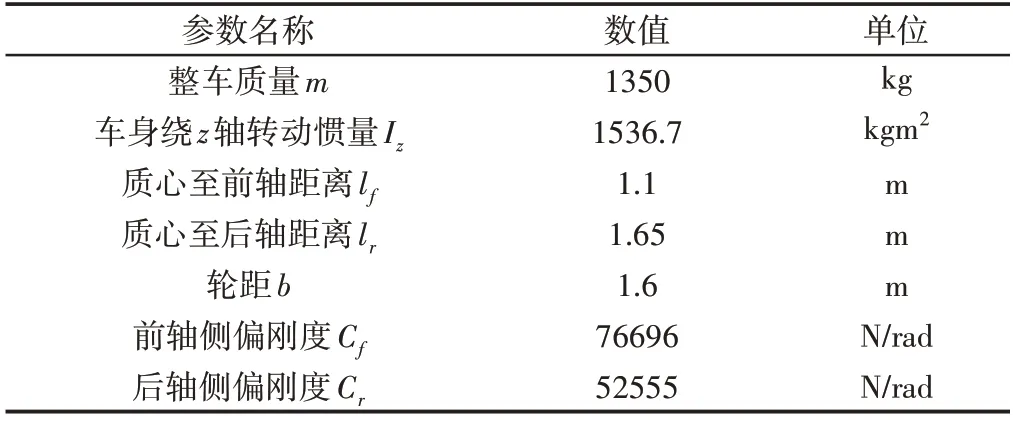
表2 車輛模型部分參數Tab.2 Vehicle Model Partial Parameters
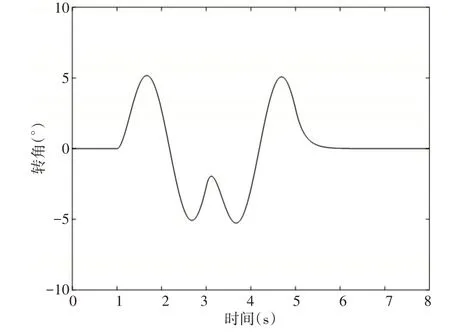
圖4 車輛前輪轉角Fig.4 Front Wheel Angle of the Vehicle
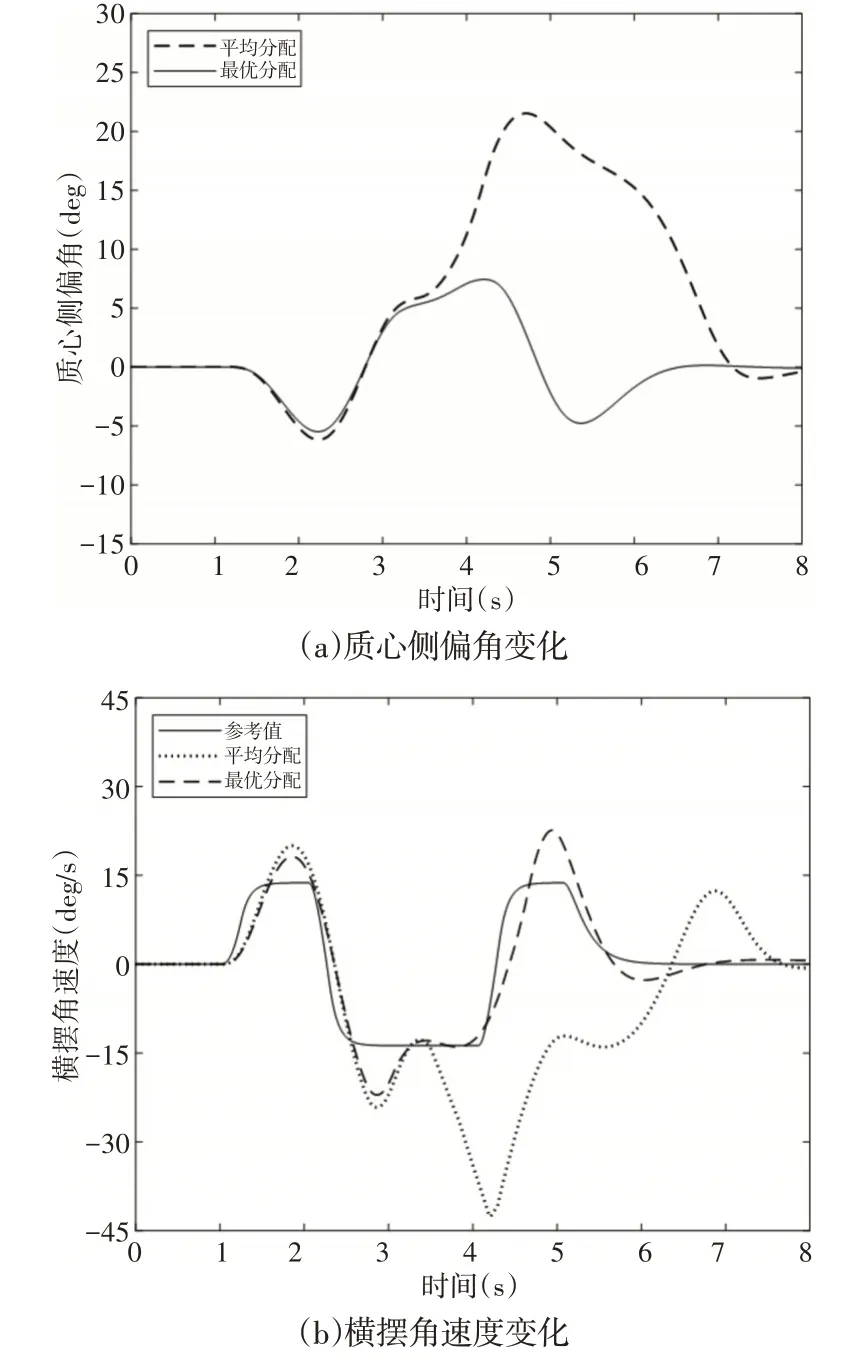
圖5 對開路面仿真結果Fig.5 Simulation Results of Split Road Surface
仿真結果表明,當車輛完全行駛在高附路面上時,兩種控制策略均能取得良好的控制效果。但當一側車輪駛入低附路面時,由于平均分配策略沒有考慮到附著系數的變化,路面無法提供足夠的附著力,車輪滑移率出現較大波動,附著利用率降低,橫擺角速度與質心側偏角出現較大幅值,車輛跑偏失去控制;而所設計的考慮附著系數變化的控制策略將滑移率維持0.11以內,使路面提供的附著系數接近于路面峰值附著系數,仍能保持足夠的附著力,橫擺角速度基本追蹤參考值,質心側偏角也處于較小的范圍內。與平均分配控制策略相比,橫擺角速度與參考值之間誤差的最大值由26.2°/s下降到8.8°/s,質心側偏角最大值由22.3°下降到6.8°,整個工況下對橫擺角速度和質心側偏角的控制效果平均提升了33.8%和35.9%。綜上所述,所提出的考慮附著系數變化的控制策略能夠有效提高車輛行駛的操縱穩定性,從而提高在變附著系數路面行駛時的轉向安全性。
4 結束語
針對車輛行駛中各輪附著系數的實時變化,提出了考慮附著系數和附著利用率的分層操縱穩定性控制算法,上層控制器通過PID與模糊控制算法計算了廣義控制力和以及滑移率調整力矩,下層控制器基于最優控制,根據最佳滑移率采用兩種控制算法集成實現,減小了約束強度。并基于Simulink-Carsim 聯合仿真設計對開路面加以驗證,仿真結果表明,該策略能夠有效約束滑移率維持在最佳范圍內,提高了附著利用率,保持橫擺角速度基本追蹤參考值,同時使質心側偏角處于較小的區間內,提升了車輛轉向行駛時的操縱穩定性。
猜你喜歡
艦船科學技術(2022年8期)2022-06-05 07:37:02
能源工程(2020年6期)2021-01-26 00:55:22
山東冶金(2019年3期)2019-07-10 00:54:04
消費導刊(2018年10期)2018-08-20 02:57:02
山東工業技術(2016年15期)2016-12-01 05:31:37
通信電源技術(2016年1期)2016-04-16 04:57:26
電測與儀表(2016年20期)2016-04-11 11:38:24
通信電源技術(2016年5期)2016-03-22 01:09:38
電機與控制應用(2015年2期)2015-03-01 03:49:24
電測與儀表(2014年24期)2014-04-09 11:35:36
