聯合神經網絡和對角加載的GNSS中斷定位算法
2024-02-28 08:40:40盧丹高鵬樺
全球定位系統 2024年1期
關鍵詞:信號
盧丹,高鵬樺
( 中國民航大學 電子信息與自動化學院, 天津 300300 )
0 引言
捷聯慣性導航系統(strapdown inertial navigation system, SINS)[1]與GNSS[2]是最常見的兩種定位系統. 而GNSS/INS組合導航系統[3]也是目前應用最廣泛、性能最優越的組合導航系統,在航空、航海、車輛等領域發揮著不可或缺的作用,通常利用卡爾曼濾波(Kalman filter, KF)將GNSS和INS的數據進行融合. 但是當載體處于城市高樓密集區、山區、隧道等惡劣環境中時,衛星信號會失鎖或者完全丟失[4],不能獲得量測矩陣,因此無法進行KF這一過程,GNSS/INS組合導航系統僅依靠INS單獨工作,導航定位結果會迅速發散[5],導航性能嚴重惡化,這也是目前組合導航系統應用中亟須解決的問題.
近年來,越來越多的學者利用人工神經網絡(artificial neural network, ANN)[6-7]輔助組合導航進行信息融合. 應用最簡單的是利用反向傳播(back propagation,BP)神經網絡輔助組合導航系統[8],當衛星信號中斷時,通過網絡輸出校正INS位置. 此外還有多層感知器神經網絡[9]、徑向基神經網絡[10](radial basis function neural network, RBFNN)、Elman神經網絡[11-12]等. 這些算法主要以KF的估計值作為網絡的訓練目標,并利用神經網絡的預測結果直接取代KF,這就放棄了由INS原理推導的系統顯式誤差模型;或者利用神經網絡預測GNSS信號中斷時丟失的量測參數,以便KF繼續進行,但是也無法模擬在衛星信號丟失過程中INS的位置與速度誤差趨勢,因此在GNSS中斷較長時間情況下,得不到較為可靠的導航定位信息. 考慮到組合導航系統是一個連續的時間序列,將當前時刻的網絡輸出與載體過去時刻的位置信息結合起來,利用自適應神經模糊推理系統[13-14](adaptive neuro-fuzzy inference system,ANFIS)、循環神經網絡(recurrent neural networks,RNN)[15]等具有記憶功能的動態網絡來輔助組合導航系統,在衛星信號中斷時獲得較好的定位結果. 由于算法自身性能較好,但本質上與BP類輔助算法類似,直接取代KF或間接輔助KF,并沒有緊密結合KF來分析神經網絡的訓練誤差對組合導航算法的影響. 并且這些算法在參數優化方面存在不足,導致訓練次數過多、訓練時間長,不適合實時應用.
上述方法結果證明了在衛星信號中斷期間,神經網絡可以通過學習慣性傳感器的輸出與真實位置之間的關系來進行預測,從而提高定位精度. 由于INS系統本身特性使上一時間預先訓練的網絡模型存在誤差,中斷時刻INS誤差仍不斷累積,因此,本文利用BP神經網絡輔助組合導航,當衛星信號失鎖時,分析訓練誤差對組合導航算法的影響,通過對角加載重構GNSS/INS組合導航中量測噪聲協方差矩陣進行KF更新,使得GNSS信號在長時間中斷期間,導航系統仍擁有較為可靠的導航性能.
1 傳統BP神經網絡輔助組合導航
1.1 濾波的狀態方程和量測方程
以SINS的姿態誤差、速度誤差、位置誤差、角速度誤差、比力誤差15×1的列向量作為松耦合導航系統的狀態變量,即
狀態方程可表示為
其中:F為15×15的SINS誤差狀態量系數矩陣,根據INS的位置、速度與姿態誤差方程計算得到[16];G為15×6的SINS噪聲分配矩陣;w為6×1的系統噪聲矩陣. 系統噪聲分配矩陣G的表達式為
在GNSS/INS松組合導航系統中,采用SINS解算的位置和速度與GNSS測量到的位置和速度之差作為量測信息[17]. 得到松組合導航系統的量測方程為
式中: δPK與 δVK為東、北、天坐標系下INS的位置與速度誤差;為GNSS的定位誤差,分布規律為0均值,協方差矩陣為的高斯白噪聲,即:.
INS在東、北、天坐標系下的位置誤差 δPK與緯度、經度、高度下的位置誤差 δPLLH,存在轉換關系如下:
其中, ψ 的表達式為
式中:L為經緯高坐標系下的緯度;RM與RN分別為子午圈半徑、卯酉圈半徑.
Hk是6×15的觀測矩陣,具體表達式為
至此建立了KF的狀態模型和量測模型,當衛星信號正常時,利用GNSS觀測量不斷修正慣導解算結果.
1.2 傳統神經網絡輔助算法
基于KF的GNSS/INS組合導航系統利用了GNSS和INS各自優點可為移動載體提供連續可靠的導航定位信息. 但由于外部干擾或當載體處于惡劣環境時,衛星信號質量下降甚至直接丟失,系統因無法得到量測矩陣Zk,導航性能迅速下降. 因此利用BP神經網絡輔助組合導航系統,達到衛星信號中斷期間內仍可獲得較為可靠的導航性能的目的. 傳統的神經網絡輔助組合導航系統分為訓練模式與預測模式兩個階段,如圖1所示.
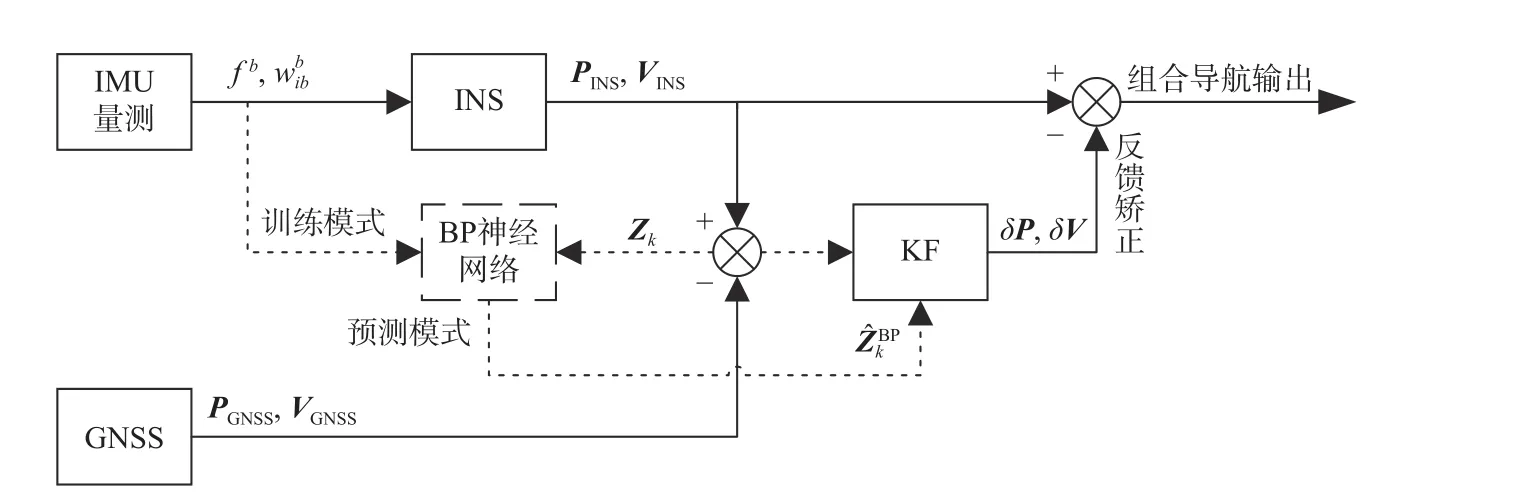
圖1 傳統神經網絡輔助組合導航原理框圖
當衛星信號可用時,選擇加速度計fb和陀螺儀的輸出作為BP神經網絡的輸入,將濾波時的量測值Zk作為網絡的訓練目標,系統進入訓練模式,并不斷優化網絡參數;當信號中斷時,可利用訓練好的網絡得到,作為KF器的量測矩陣來校正INS輸出.因此神經網絡的輸入輸出關系可表示為
然而,由于BP神經網絡模型與INS誤差模型的特性,利用人工神經網絡只能部分補償INS帶來的誤差. 在衛星信號失鎖期間,INS誤差仍不斷累積,導致中斷后經網絡預測得到的量測值與參考值存在一定的誤差,這也是目前神經網絡在衛星信號中斷時輔助組合導航系統定位效果并不理想的主要原因.
2 基于對角加載的更新算法
在衛星信號失鎖期間,中斷后由于INS的累計誤差導致經網絡預測得到的量測值小于參考值. 設定誤差值為Ek,且為負值,所以網絡預測過程中,量測值如式(9)所示:
將式(4)代入式(9)可得
因此GNSS中斷時,由傳統神經網絡輔助KF時,原量測噪聲協方差矩陣存在誤差. 由式(11)可知,更新后的協方差矩陣相當于矩陣的對角加載得到. 并且由于誤差Ek是由中斷后INS累計誤差造成,所以 λ 的取值可為:
其中:w1為加速度計常值漂移;w2為陀螺儀常值漂移;T為信號中斷時長. 并將上述構建的噪聲協方差矩陣代入濾波過程.
GNSS中斷時,基于對角加載來重構噪聲協方差矩陣(reconstruct the covariance matrix,RCM)為中斷時刻的濾波量測矩陣,新的對角加載KF迭代方程如下:
預測方程:
狀態更新方程:
本文結合BP神經網絡,通過矩陣對角加載的方法,重構量測噪聲協方差矩陣,并更新中斷時刻的KF算法定義為BP-RCMKF,其工作流程分為兩部分:第一部分為GNSS信號可用時,網絡在線學習的訓練模式;第二部分是當GNSS信號中斷時,網絡根據上一時刻的訓練結果重構量測噪聲協方差矩陣,更新KF方程. 具體工作原理如圖2、圖3所示.
圖2 神經網絡輔助組合導航訓練模式框圖

圖3 神經網絡輔助組合導航預測模式框圖
當GNSS衛星信號可用時,GNSS數據可通過與INS位置/速度信息做差值來提供測量值Zk,神經網絡輔助組合導航系統以訓練更新模式工作,如圖2所示,將獲得的Zk作為網絡目標,并選擇加速度計和陀螺儀的輸出作為網絡輸入. 在GNSS工作良好的情況下,利用目標數據在線更新神經網絡參數. 當GNSS信號發生中斷時,神經網絡輔助組合導航系統切換到預測模式. 如圖3所示,中斷時的陀螺儀和加速度計的量測值作為神經網絡的輸入參數,來預測中斷時的量測,同時由于BP網絡預測值與真實值的誤差關系,加入量測誤差模型Ek,并重構量測噪聲協方差矩陣,進行對角加載KF.
3 仿真實驗
模擬一段時間為1200 s的飛行軌跡,飛行的起始位置為(116°E,40°N),高度為1000 m,通過GNSS模擬器生成GNSS衛星信號,并由軟件接收機得到GNSS的位置信息,飛行軌跡如圖4所示. 人為設置GNSS信號在600~800 s中斷,來驗證新方法的有效性.
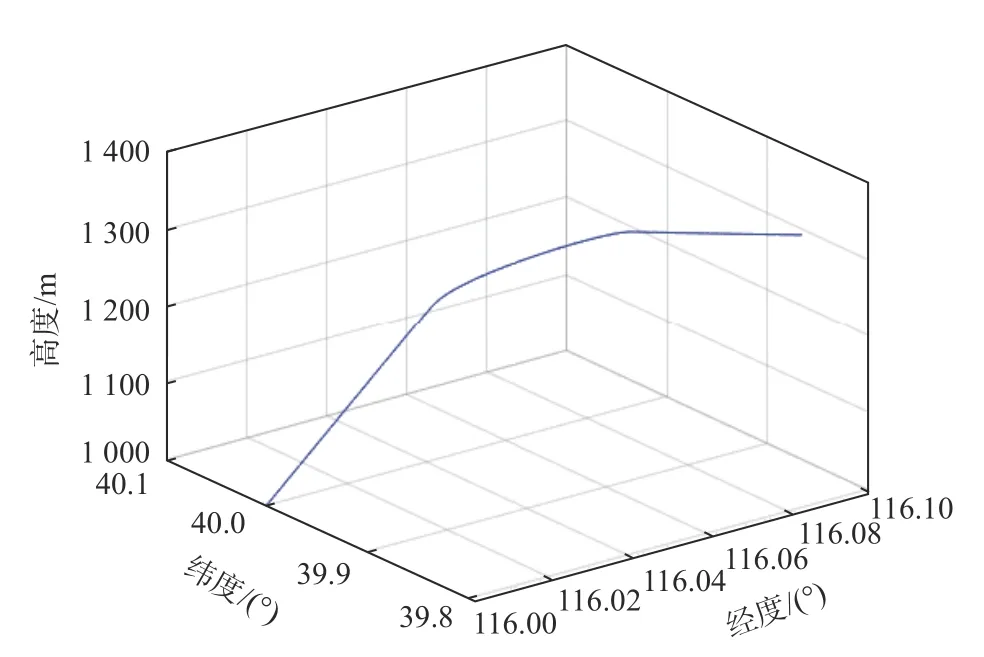
圖4 飛行軌跡圖
設置INS誤差參數如表1所示. 選擇用BP神經網絡來輔助衛星信號中斷時的組合導航系統,BP神經網絡的參數如表2所示,其中網絡的輸入樣本為陀螺儀和加速度計的輸出,網絡的輸出目標為KF量測值Zk,隱藏層神經元的個數根據經驗公式選擇為13并進行網絡訓練.
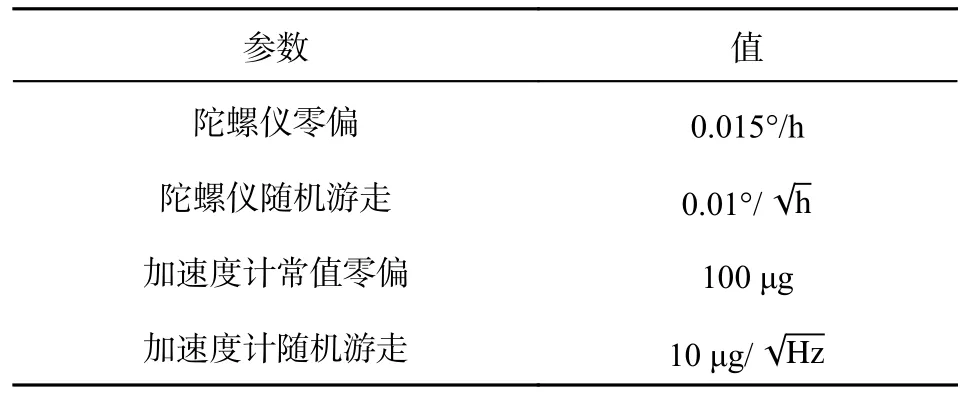
表1 INS誤差參數
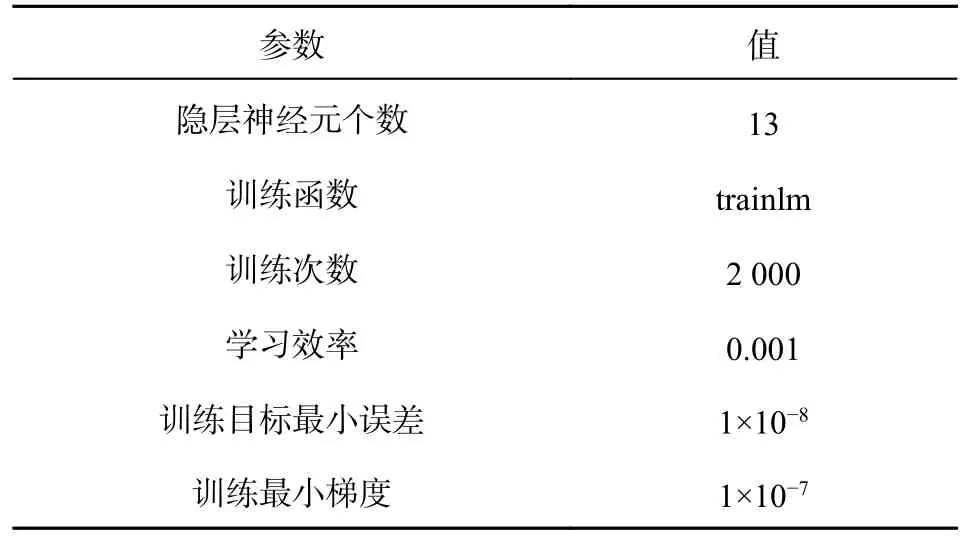
表2 BP神經網絡參數設置
通過傳統神經網絡預測來輔助組合導航系統,BP神經網絡輔助KF校正INS誤差,在600~800 s的GNSS衛星信號中斷期間,由網絡預測得到的量測值與假設未中斷時參考值存在誤差,如圖5所示,圖中展示了這兩個量測值在位置分量上的誤差.

圖5 網絡預測的量測值與參考值對比
仿真進行了500次蒙特卡洛實驗,得到了經過不同方法BP神經網絡輔助組合導航系統在遭遇GNSS衛星信號失鎖及其恢復情況下的定位誤差,如圖6所示. 在600~800 s衛星信號中斷200 s期間,在傳統方法由純INS工作方式下,導航誤差迅速增大,經過BP網絡輔助組合導航系統后定位誤差均得到改善,驗證神經網絡輔助算法的有效性. 由于神經網絡的訓練目標為INS的位置、速度誤差,代替KF器直接對INS進行校正,BP代替KF算法導航結果并不理想;采用BP-KF算法并不能很好的處理中斷時INS的累計誤差;通過重構量測噪聲協方差矩陣,更新KF流程,提出的BP-RCMKF重構量測噪聲協方差矩陣輔助算法的導航定位效果更好,并且在801 s GNSS中斷恢復后,定位誤差可以在較短的時間內恢復到正常情況.
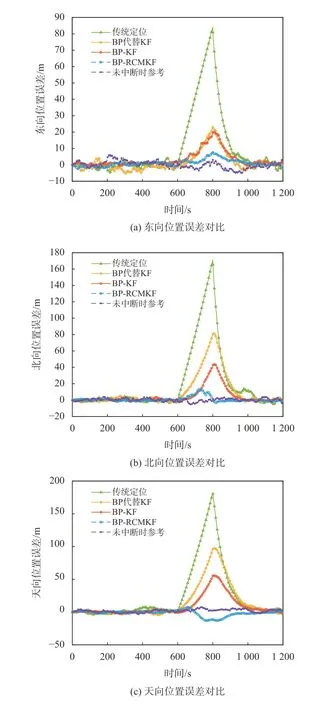
圖6 不同預測方法下導航定位誤差對比
在200 s中斷時長內,通過BP-RCMKF神經網絡預測輔助組合導航系統的定位效果有明顯改善. 如表3所示,列出了在不同輔助方法下位置誤差的均值與均方根的值. 其中,東向位置誤差降低了93.11%,北向位置誤差降低了92.27%,天向位置誤差降低92.13%;本文提出的BP-RCMKF算法在東向、北向與天向定位誤差最大值分別為8.47 m、16.74 m、13.17 m,東向、北向與天向定位誤差的均方根值分別為3.33 m、7.43 m、7.89 m,與BP-KF相比東向位置誤差降低了59.98%,北向位置誤差降低了37.35%,天向位置誤差降低了67.82%.
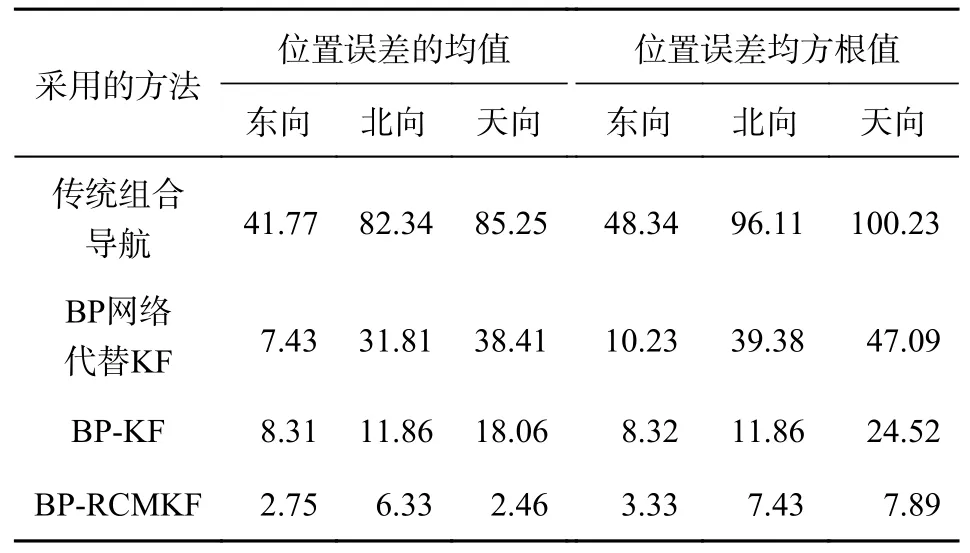
表3 不同輔助方法下位置誤差統計特性m
進一步對比不同輔助方法,進行了500次的蒙特卡洛實驗,對GNSS衛星信號從短時間中斷到長時間中斷情況下的定位誤差進行統計,如圖7所示. 如圖7(b)中,中斷40 s時,由于中斷時間較短造成經BP網絡預測的量測值誤差較小,導致重構量測噪聲協方差矩陣方法效果不明顯,但在衛星信號失鎖較長時間時,重構量測噪聲協方差矩陣的輔助算法在實驗中東、北、天向均方根誤差更小,驗證了BP-RCMKF算法的有效性.
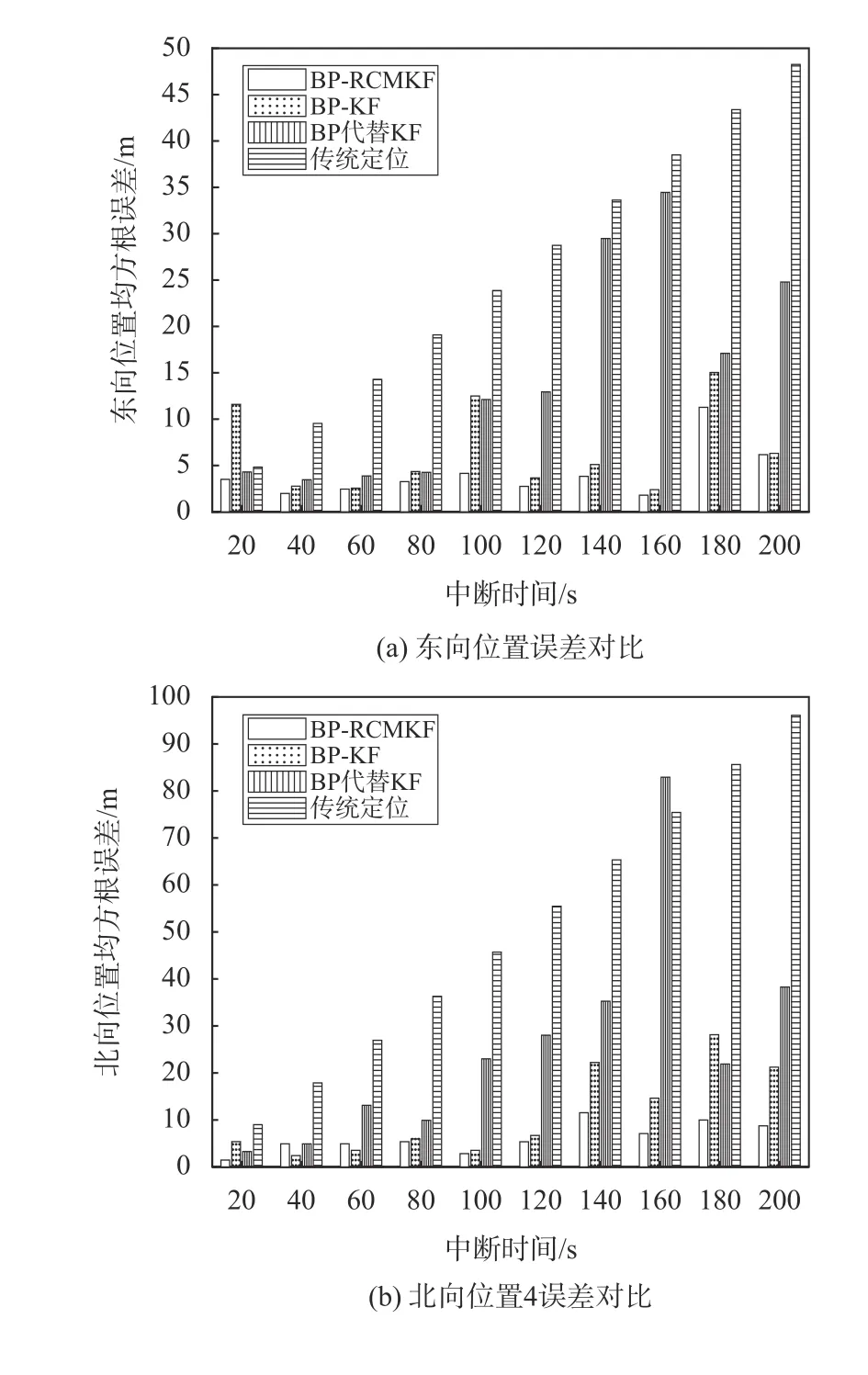
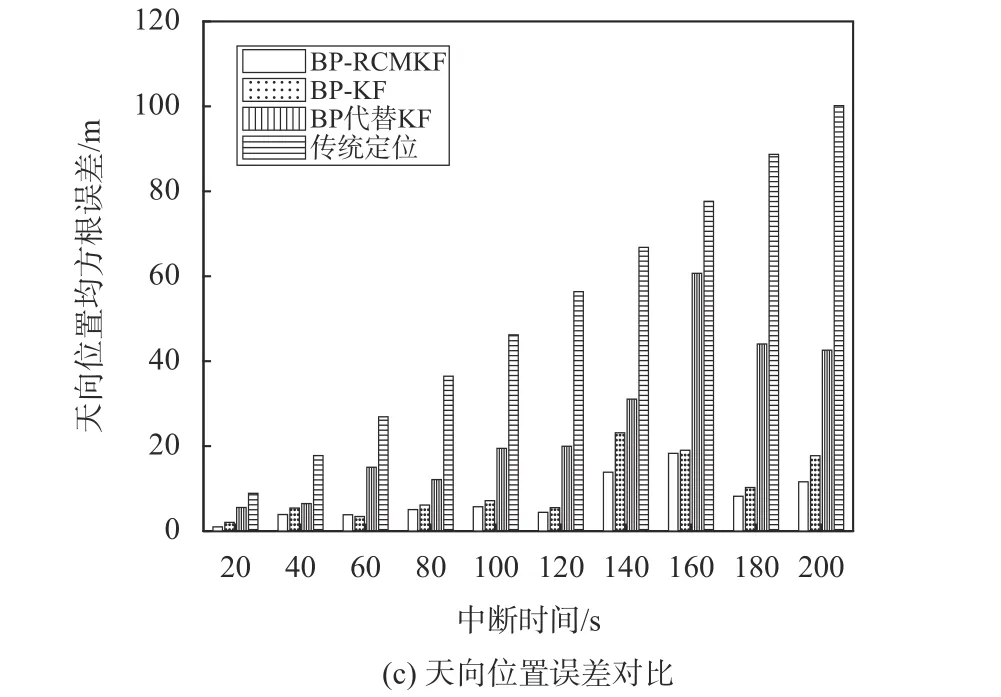
圖7 不同中斷時間下各種輔助方法的定位誤差對比
4 結束語
基于INS的誤差模型與神經網絡的預測模型分析,本文提出了一種基于BP神經網絡輔助組合導航系統的BP-RCMKF改進算法來彌補GNSS衛星信號中斷期間迅速增大的定位誤差. 經過仿真實驗分析可得,提出的重構量測噪聲協方差陣更新KF的方法能夠彌補GNSS失鎖時由INS單獨工作帶來的累計誤差,有效降低衛星信號中斷期間的導航定位誤差,達到較好的導航定位性能.
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(2018年2期)2018-04-18 12:18:10
鐵道通信信號(2016年11期)2016-06-01 12:11:32
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
中國病理生理雜志(2015年8期)2015-12-21 12:38:06
