多基線數(shù)字圖像相關(guān)技術(shù)在基坑監(jiān)測中的應(yīng)用研究
2024-02-27 03:01:20王雪帆黃文德
山西建筑 2024年5期
王雪帆,鄒 燕,黃文德
(1.廣州白云國際機場建設(shè)發(fā)展有限公司,廣東 廣州 510403; 2.廣州市吉華勘測股份有限公司,廣東 廣州 511431)
基坑監(jiān)測以基坑巖土性狀、支護結(jié)構(gòu)變位和周圍環(huán)境條件的變化為對象進行觀測分析,并預(yù)測導(dǎo)致的變形及穩(wěn)定狀態(tài)的發(fā)展和周圍環(huán)境造成影響的程度。基坑水平位移、豎向位移監(jiān)測常用的諸如全站儀、水準儀等傳統(tǒng)設(shè)備,數(shù)字化測量水平較低。隨著計算機技術(shù)的發(fā)展,多目立體匹配技術(shù)取得不少成果[1]。多基線數(shù)字圖像相關(guān)技術(shù)利用多目視覺代替人眼的雙目視覺測定影像的同名點,通過影像間匹配的同名點進行連續(xù)相對定向、影像拼接,在多度重疊影像間通過前方交會求解待定點的坐標[2]。數(shù)字圖像相關(guān)技術(shù)是一種非接觸式現(xiàn)代光學測量技術(shù),具有測量精度高、遠距多點、高頻率、全場測量等特點[3],在基坑數(shù)字化測量應(yīng)用前景廣闊。
1 數(shù)字圖像相關(guān)技術(shù)研究
數(shù)字圖像相關(guān)法(Digital Image Correlation,DIC),也稱為數(shù)字散斑相關(guān)法,將變形前后的兩幅數(shù)字圖像進行對比獲取變動數(shù)據(jù)信息,原理是對變形前圖像中的區(qū)域進行網(wǎng)格劃分,將每一個子區(qū)域作為剛性線性運動;再針對每一個子區(qū)域,利用一定的搜索方法按照預(yù)先定義的函數(shù)算法進行計算;在變形后的圖像中尋找與這一子區(qū)域相關(guān)系數(shù)最大的區(qū)域,也就是該子區(qū)域在變形后的具體位置,獲取并測量該子區(qū)域的實際位移變化量,對全部子區(qū)域進行計算后,獲取全場的變形信息[4]。
數(shù)字圖像相關(guān)技術(shù)的測量原理是交會法,其基本數(shù)學模型是共線方程,即理想狀態(tài)下,攝影瞬間的物點、鏡頭中心(物鏡中心)、像點這三點位于同一直線上,描述這三點共線的數(shù)學表達式稱為共線條件方程,其基本原理可參考文獻[3]。
多基線技術(shù)將原來“單基線”兩條光束交會擴展到多條光束交會,增加多余觀測,提高了觀測精度,解決交會角大小使精度與影像匹配之間的矛盾。短基線、大重疊圖像所構(gòu)成的交會角,有利于提高自動匹配的精度和物點的解算精度。李國鴻等[5]通過對數(shù)字近景攝影基坑監(jiān)測方法改進,對實施方案和精度進行了評價,并對全站儀與數(shù)字近景測量進行了精度比對分析,技術(shù)路線可行。
2 基坑表面監(jiān)測參數(shù)和精度
根據(jù)GB 50497—2019建筑基坑工程監(jiān)測技術(shù)標準要求水平位移和豎向位移觀測精度要求,如表1所示。
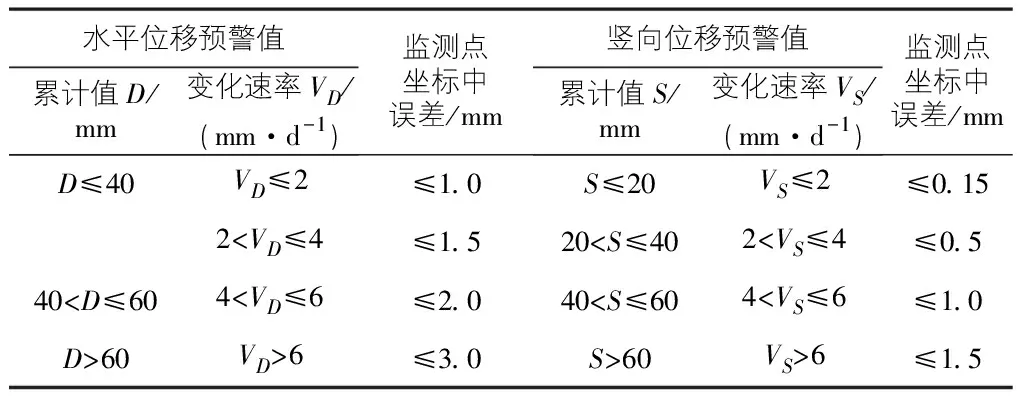
表1 水平位移和豎向位移監(jiān)測精度要求
當前數(shù)字圖像相關(guān)技術(shù)在基坑監(jiān)測精度方面的研究一致性較強,王國輝等[6]使用民用項目,在坑內(nèi)/邊放置基準桿和定長桿,通過計算點的物方坐標,監(jiān)測精度達到了±3 mm;隋騰飛等[7]研究表明,多基線數(shù)字攝影測量目前能達到的絕對精度為±0.1 mm;文獻[1]研究表明,在滿足測量精度的前提下,DIC測量的視場寬度變動較大,相對于靶標/散斑影像尺寸,可滿足絕大多數(shù)情況下,JGJ 8—2016建筑變形測量規(guī)范規(guī)定的建筑變形測量的等級和精度,結(jié)果誤差可達到亞毫米級。
3 基坑監(jiān)測實驗
3.1 實驗設(shè)備選取
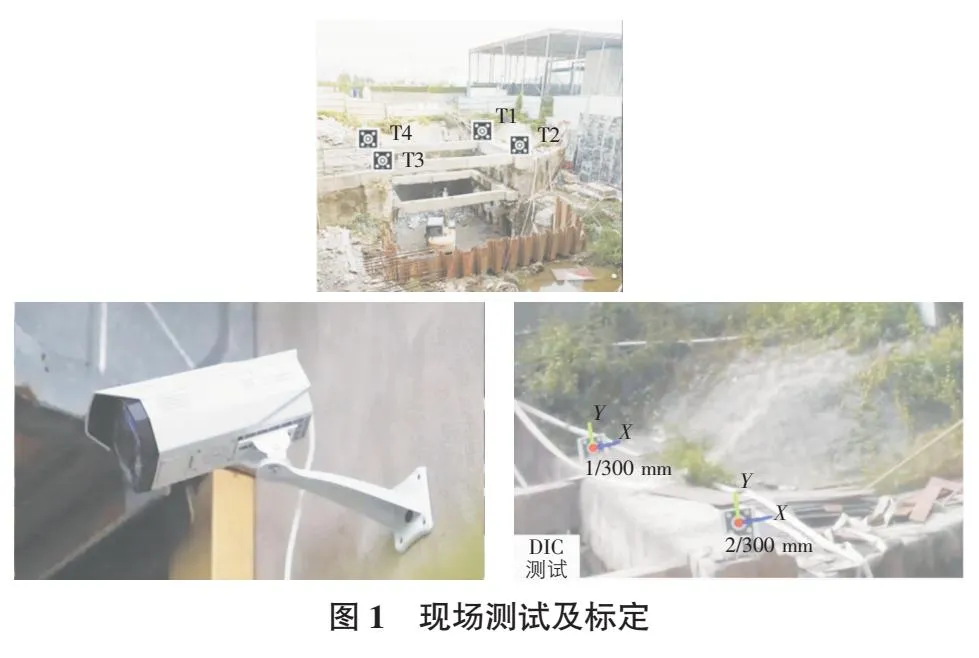
根據(jù)GB 50497—2019建筑基坑工程監(jiān)測技術(shù)標準要求,監(jiān)測點水平間距不宜大于20 m,水平位移和豎向位移監(jiān)測點宜為共用點,文獻[8]利用多基線數(shù)字近景攝影測量系統(tǒng),如圖1所示,確定基坑測點之間的距離應(yīng)保持在15 m左右為宜。根據(jù)設(shè)計文件,試驗水平位移和豎向位移共用點,間距約為10 m,監(jiān)測采用民用級相機,固定安裝在立柱上,如圖1所示。
攝影相機傳感器為1/1.8″CMOS,像元尺寸為4.5 μm;變焦鏡頭焦距為16 m~48 m,視場角為29.5″~9.5″,分辨率3 MP,畸變w0.25%/T0.1%。
3.2 分辨率及測量精度
根據(jù)小孔成像(相機針孔模型)原理,相機焦距越長,視場角越小,拍攝遠距離物體越清晰,因此,焦距的選擇與攝影距離相關(guān),像元尺寸越小,圖像分辨率越高。該型號相機的測量精度、視場寬度、坐標中誤差等分析可參考文獻[3]。
分辨率是相機最基本的參數(shù),是芯片靶面排列的像元數(shù)量。基于小孔成像原理,可計算得到:
其中,ε為測量精度;L為測量距離;dx為感光芯片像元尺寸;f為相機焦距;α為亞像素精度放大系數(shù);D為視場寬度;rx為相機分辨率。根據(jù)現(xiàn)場條件計算焦距,f=32 mm,測量距離L=100 m,計算理論測量精度ε=0.140 6 mm/pixel,理論測量視場寬度D=27 m。
根據(jù)計算精度,試驗設(shè)備滿足測量點中誤差精度、視場寬度試驗要求。
3.3 技術(shù)應(yīng)用要點
DIC測量技術(shù)可以在瞬間快速地抓取被測量對象的相關(guān)物理信息以及位置信息,具有成像速度較快、信息量較大且易于存儲的優(yōu)勢。實施過程中,應(yīng)注意以下要點。
3.3.1 注意對于靶標尺寸及位置的選擇
基坑監(jiān)測首先要選好靶標控制點的位置,保證拍攝角度和清晰度,對監(jiān)測過程中數(shù)據(jù)的精確度、穩(wěn)定性、連續(xù)性有很大影響。除此之外,需要通過現(xiàn)場測試,選定合適的靶標尺寸,減小垂直方向上攝影測量深度對視場范圍、測量精度的影響。
3.3.2 攝影設(shè)備安裝
基坑監(jiān)測周期一般為10個月左右,部分超深基坑可能存在3年左右的監(jiān)測周期,是一個相對長期的監(jiān)測過程。因此在實施中,攝影設(shè)備安裝盡量選取固定式、不可旋轉(zhuǎn)基座;有條件的情況下,將安裝后的攝影設(shè)備基座,通過全站儀觀測安裝位置“對角”初始位置值,以備后期維護校正。
3.3.3 攝影設(shè)備檢校
非量測相機內(nèi)部結(jié)構(gòu)的不穩(wěn)定性,即使已經(jīng)檢校好的相機,當相機發(fā)生運動,或者位置發(fā)生改變時,其檢校參數(shù)都有可能發(fā)生改變,任何一種檢校模型都不能消除這些因素的影響,而實驗室場的檢校方法是不能夠滿足非量測相機的需求的,對于非量測的相機來說,應(yīng)考慮用檢校法進行相機的檢校工作并采用適當?shù)姆椒▉硖岣邫z校的精度[9]。
張正友[10]提出了著名的“張氏標定法”,這種方法中考慮到了比例尺不一致性和兩坐標軸的不垂直性的問題,現(xiàn)在已經(jīng)成為機器視覺領(lǐng)域的重要基礎(chǔ)。進行檢校、實施前,應(yīng)對設(shè)備進行光學畸變和內(nèi)方位元素的檢校,防止在圖像采集時非線性畸變破壞圖像的質(zhì)量。內(nèi)方位元素的檢校,通過計算攝影中心點與相片位置的相互關(guān)系,來確定內(nèi)方位元素的測量。
3.4 監(jiān)測數(shù)據(jù)結(jié)果分析
在對基坑變形監(jiān)測實驗中,對T1—T4四個測點進行了連續(xù)觀測,由于觀測數(shù)據(jù)結(jié)果較多,本文篩選不同時段連續(xù)觀測數(shù)據(jù),繪制變形曲線圖,如圖2所示。
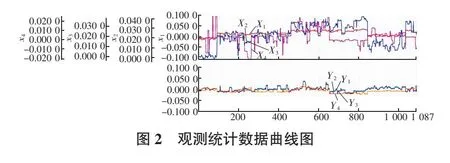
從圖2中數(shù)據(jù)統(tǒng)計可以看出,觀測結(jié)果具有很高的靈敏度、穩(wěn)定性,測量精度高,能夠達到亞毫米級,可以實現(xiàn)基坑水平位移和豎向位移觀測,該系統(tǒng)具有可行性。
4 結(jié)語
在當前的高精度基坑變形監(jiān)測過程中,對數(shù)字圖像相關(guān)技術(shù)應(yīng)用還不充分,但在測量精度、數(shù)字化程度等方面具有很強的應(yīng)用優(yōu)勢,運用前景廣闊。實驗過程中,還未經(jīng)歷惡劣天氣的驗證,今后將逐步完善數(shù)字圖像相關(guān)技術(shù)在不同工況條件、不同天氣等環(huán)境因素下的適應(yīng)性實驗。
猜你喜歡
中華詩詞(2020年1期)2020-09-21 09:24:52
中學生數(shù)理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數(shù)理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
小學生作文(中高年級適用)(2018年5期)2018-06-11 01:22:56
中學生數(shù)理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數(shù)學小靈通·3-4年級(2017年10期)2017-11-08 08:42:59
數(shù)學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
中學生數(shù)理化·七年級數(shù)學人教版(2017年11期)2017-04-23 07:18:00
數(shù)學大王·中高年級(2016年12期)2016-12-26 21:37:36
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21