散貨船水尺計重所用無人船設計
2024-02-26 08:43:26沈益駿劉新王濤屠卡濱張鳥飛陳雯
船海工程 2024年1期
關鍵詞:船舶
沈益駿,劉新,王濤,屠卡濱,張鳥飛,陳雯
(1.舟山海關綜合技術服務中心,浙江 舟山 316000;2.張家港海關,江蘇 張家港 215600;3.嵊泗海關綜合技術服務中心,浙江 嵊泗 202450)
1 設計思路
利用岸基系統,遠程控制小型無人船,運用激光雷達避障、卡爾曼濾波器運算、圖像傳輸等技術和原理,使其安全到達指定位置,并把水尺畫面穩定傳回并由圖像識別軟件智能讀出水尺數據。模擬工作場景見圖1。
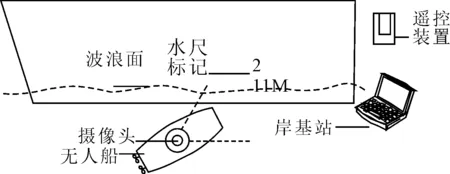
圖1 無人船工作場景模擬
手持遙控裝置,操控無人船至散貨船水尺標記位置,通過攝像頭傳回圖像,同時后臺開始錄像存儲與圖像識別,經圖像識別軟件及后臺計算,自動給出該處水尺的數值,則該位置的水尺觀測完成,無人船開往船舶下個水尺標記處,繼續進行同樣的操作。待被測船舶六面水尺全部完成讀取后,根據相應公式進行修正計算,最后得出該船舶此時所裝載的貨物重量。
2 小型無人船設計
小型無人船主要由水上平臺、岸基站系統、圖像處理3部分組成,見圖2。
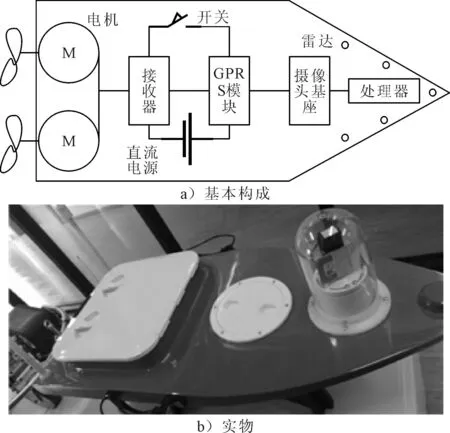
圖2 無人船基本構成設計和實物
無人船水上平臺設計需考慮平穩行駛的需求,由于使用環境主要是在江海,為避免金屬材質船板受海水腐蝕,其全部采用塑料材質。由于亞克力具有較高的透光率,為達到良好的攝錄效果且起到保護作用,攝像頭部分則由該材質密封覆蓋;岸基站系統主要有地面站和手持遙控器組成,為經濟實用,選擇手持遙控器為主;軟件系統則以配套自行研制的圖像處理軟件。
2.1 水上平臺研制
該無人船船體總長1.2 m、寬度0.8 m,船體總高0.7 m(包括凸起部分),吃水0.12 m,船體自重12 kg,船體為塑料材質,滿載工作航速為1.5 m/s,鋰電池作為電源,續航力不少于2 h。
2.1.1 動力裝置設計
無人船由一對電機為其提供動力,電機直徑30 mm、長度45 mm。為確保耐用,為其做了全密封防水外殼,防水深度可達50 m。電機工作電壓為12 V,由鋰電池為其提供動力。螺旋槳為厚度2 mm的3葉正反漿,直徑4 cm;正反漿搭配使用,可實現無人船的前進、后退、左轉、右轉。具體參數見表1。
【評析】在本課的設計中,首先挖掘導數幾何意義的知識背景,設置貼近學生實際的坐“過山車”時視線的變化,來幫助學生感性認識在上升或下降與視線的斜率之間的關系;其次借助超級畫板,從幾何直觀來演示遞增與遞減時,切線斜率符號變化情況;再結合函數單調性定義和導數定義從理性的角度去探索函數單調性和導數正負的關系,讓學生從感性到理性去認識和理解函數單調性和導數正負之間本質關系,并歸納總結出一般性結論,真正發展了學生思維能力.

表1 電機參數
2.1.2 避障功能設計
設計無人船不僅可以手持遙控器進行遙控操作,也可通過地面站遙控。因此,在人眼看不見的情況下,為防止碰撞損壞,須具備基本的避障功能[1]。無人船所處工作環境較復雜,水分、鹽分高,且水面常有漂浮物,為達到經久耐用的目的,經反復試驗,最終選擇激光雷達結合處理器的避障方案。具體如下:5枚激光雷達設置在船頭位置,分別對應右、右前、前、左前、左共計5個方向。5組數據經處理器處理,做出避障反應。如遇到障礙物,無人船則運用內置處理器系統自動操控電機,通過調整左右電機速率,改變無人船行進方向,進而躲避障礙物。如無法避讓,則處理器給出指令,電機立即倒轉,無人船做出緊急倒車處置,及時避免撞擊。
2.2 岸基站系統研制
岸基站系統主要由地面站(電腦)和手持遙控器組成。工作人員手持遙控器滿足0.3 km遙控操作距離;地面站滿足2 km遙控操作距離。水尺計重所用無人船均在工作人員視野范圍內進行。
2.2.1 遙控控制
無人船的手持遙控由4通道無線控制模塊構成。該模塊由無線發射和接收模塊兩部分組成,結合一對電機,分別控制無人船的前進、后退、左轉、右轉。模塊參數見表2。
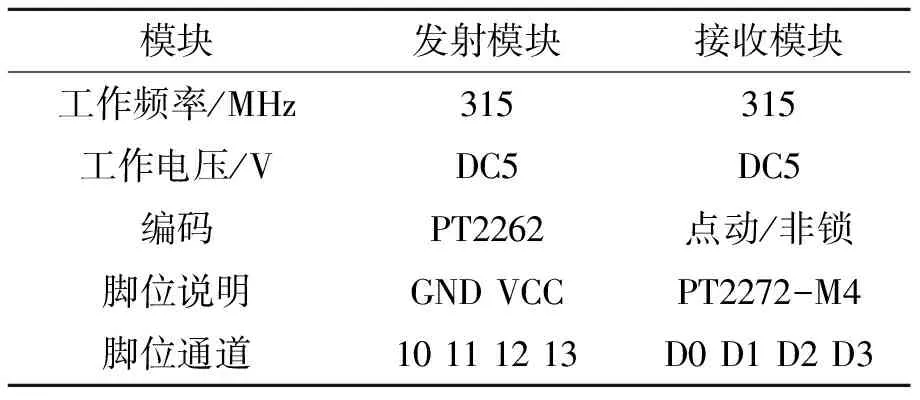
表2 模塊參數
2.2.2 無線圖像傳輸
無線圖像傳輸根據調制方式不同分為數字和模擬兩種方式。該無人船用途為觀測船舶水尺,所以要求運用的技術需具備傳輸穩定特點,尤其是裝運帶有磁性的礦產品船舶要具備抗磁干擾,且反應快、延遲低等特點。經綜合考慮,該無人船采用被廣泛應用的CV5200遠距離WIFI自組網圖像輸出解決方案。自組網不依賴現有基礎設施,可減低岸基系統組建的壓力,且使無人船整套系統易于攜帶和搬運。每個網點是用戶接入點,也是路由選擇點,能有效解決路徑衰弱和干擾問題。
2.3 圖像處理識別
水尺圖像處理則采用文獻[2]所述的基于圖像處理的船舶水尺標志識別方法。該方法開發的軟件工作流程見圖3,具體可分為3步:①對無人船傳至的水尺圖像進行縱向顏色梯度處理,準確識別水線位置;②基于軟件庫標準水尺標志樣本圖像,進行自動匹配,無人船的水尺圖像經二值化處理后與樣本圖像進行自動匹配,匹配成功則進入下一環節,匹配失敗則換圖像重新匹配;③根據設計的計算公式自動算得船舶吃水值。本無人船在岸基系統上安裝圖像識別軟件,并通過技術處理,實現無人船傳輸的水尺圖像進入自行研發的水尺圖像識別軟件,經軟件分析、識別,自動給出水尺吃水數值。
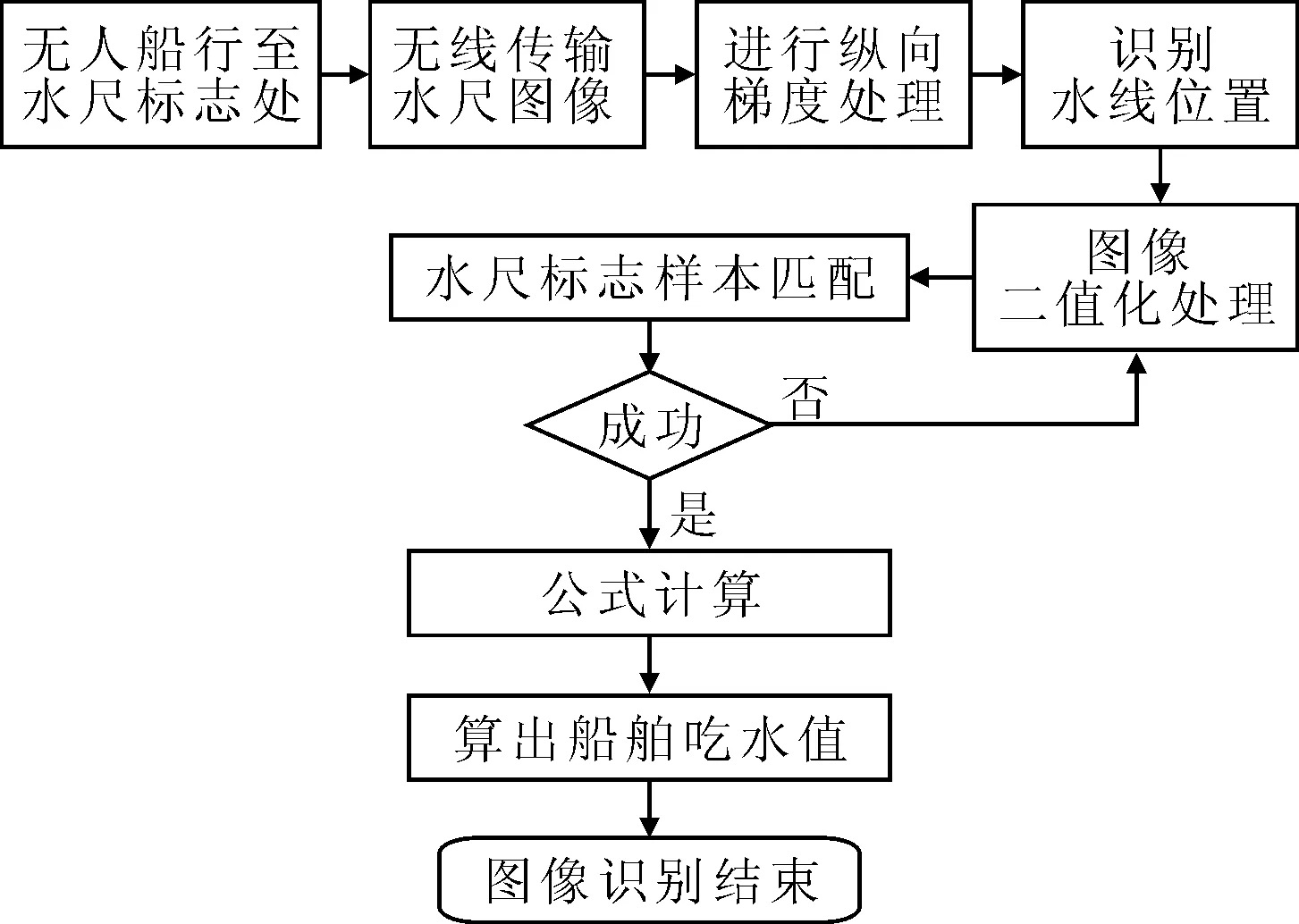
圖3 圖像處理工作流程
3 使用方法
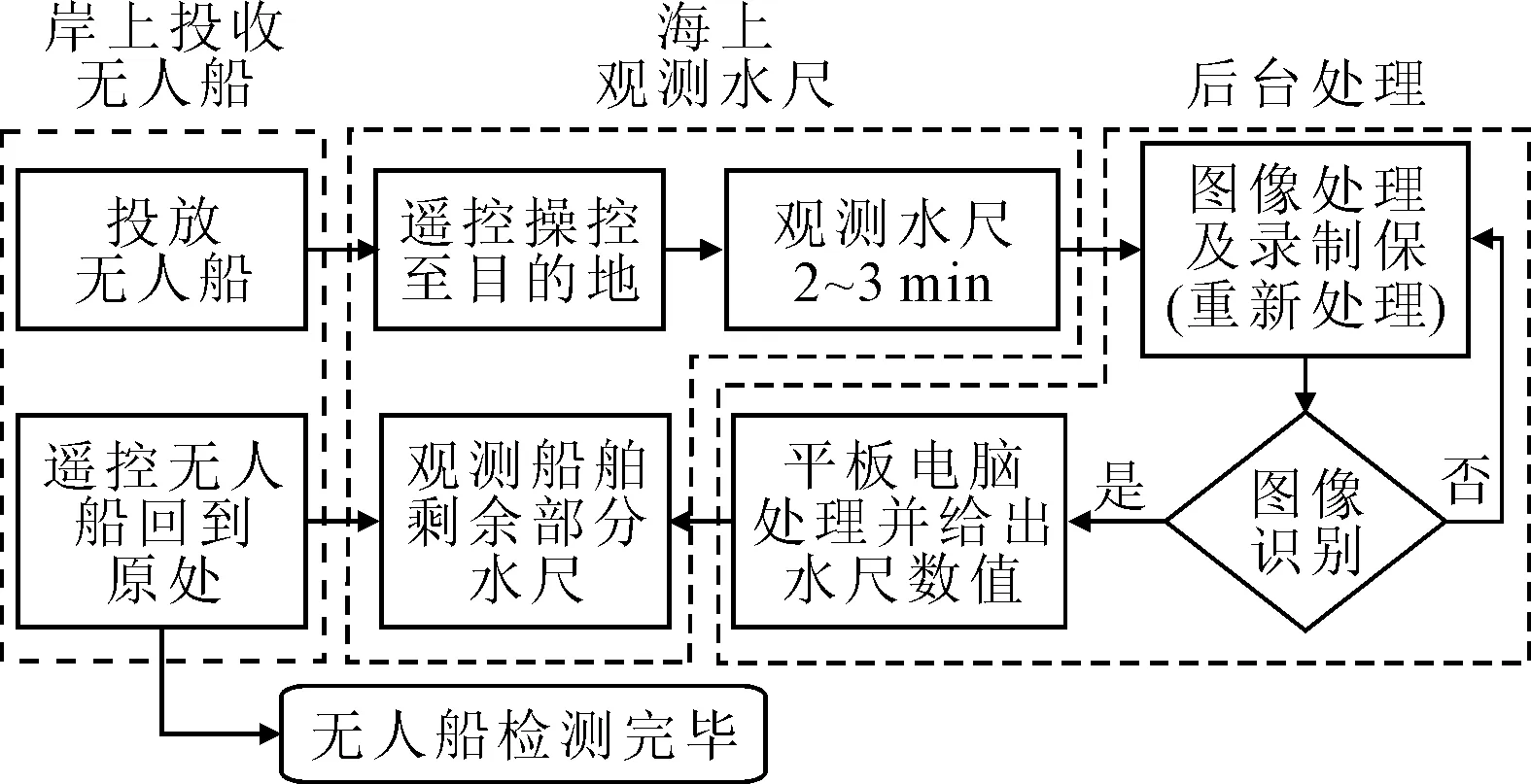
圖4 無人船操作流程
具體使用方法如下:待船舶靠港且系纜完畢后,由檢驗員利用特制支架將無人船由船舶泊位平穩放置在海面上,檢驗員手持帶平板的遙控器,通過實時傳輸圖像,航行至船舶水尺標記處。無人船已配置5枚激光雷達,但是仍可能存在無法識別或者遺漏的盲區,如在這些范圍內存有障礙物,無人船則會自動緊急避障,避免造成經濟損失。在到達指定位置后,調整無人船位置,使船舶水尺標記位于屏幕中間位置,并占整個畫幅的1/3,持續保持2~3 min。在保持階段,平板自動啟動圖像處理軟件,并給出吃水數值,同時自動錄制為AVI格式的高清視頻,以備事后查看、確認。船舶六面水尺查看完畢,則遙控無人船回至投放點,由支架將其送回岸邊,水尺計重中的觀測水尺環節結束。
4 水尺計重數據處理
4.1 排水量計算
排水量的計算依據拱陷校正[3]后的平均吃水以及相關圖表進行查算。
4.1.1 計算相應排水量
根據拱陷校正后平均吃水D/M,在船舶排水量表上查算相應的排水量,在圖表中查找最近接D/M的吃水點,其對應的排水量或載重量數作為基數Δ1。
4.1.2 排水量的縱傾校正
當船舶產生縱傾時,由于此時吃水線和平浮時不一樣,其船艏和船艉部分所增減的出水、入水體積也不一樣,如果按平浮狀態的排水量表查算,顯然與實際排水量不符。因此必須對前述查算的相應排水量進行校正,以計算出縱傾校正后的排水量。校正方法采用國際上通用的根本氏校正[4]公式。
(1)
式中:δΔ1為排水量的第一項縱傾校正值,t;TC為校正后船舶吃水差,m;Xf為D/M處漂心距船舯距離,m;TPC為D/M相應處的每厘米吃水噸數,t;Lbp為垂線間長,m。
(2)

縱傾校正后,船舶總排水量為
Δ3=Δ1+δΔ1+δΔ2
(3)
式中:Δ3為縱傾校正后的排水量。
4.2 貨物重量計算
排水量經港水密度校正、壓載水的測量和計算、淡水和燃油的測量和計算后,將有關數據代入式(6)進行計算,最終得出無人船看水尺后貨物的總重量[5]。
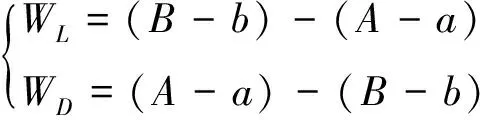
(4)
式中:WL為裝貨重量,t;WD為卸貨重量,t;A為裝或卸前校正的排水量,t;a為裝或卸前船用物料及其他貨物等的總重量,t;B為裝或卸貨后校正后的排水量,t;b為裝或卸貨后船用物料及其他貨物等的總重量,t。
5 試驗測試
2022年3—4月份,在舟山某港區對在此靠港卸貨的國際散貨船進行測試,測試的目的是為檢驗其數據是否真實靠、工作效能是否顯著提升。測試方法如下:在規定時間內有序隨機選擇其中10艘次船舶的艏、舯、艉共計6處為水尺觀測目標。為確保測試數據可信,測試時,分成兩組并同時進行,并做好完成時間記錄,第一組為使用無人船觀測水尺,第二組為傳統水尺計重作業目測方式進行。記錄觀測數據并運用文中上述排水量等公式計算貨物重量。目測水尺精度公制為0.01 m,無人船則為0.001 m。數據對比測試見表3,時效性對比測試見表4。
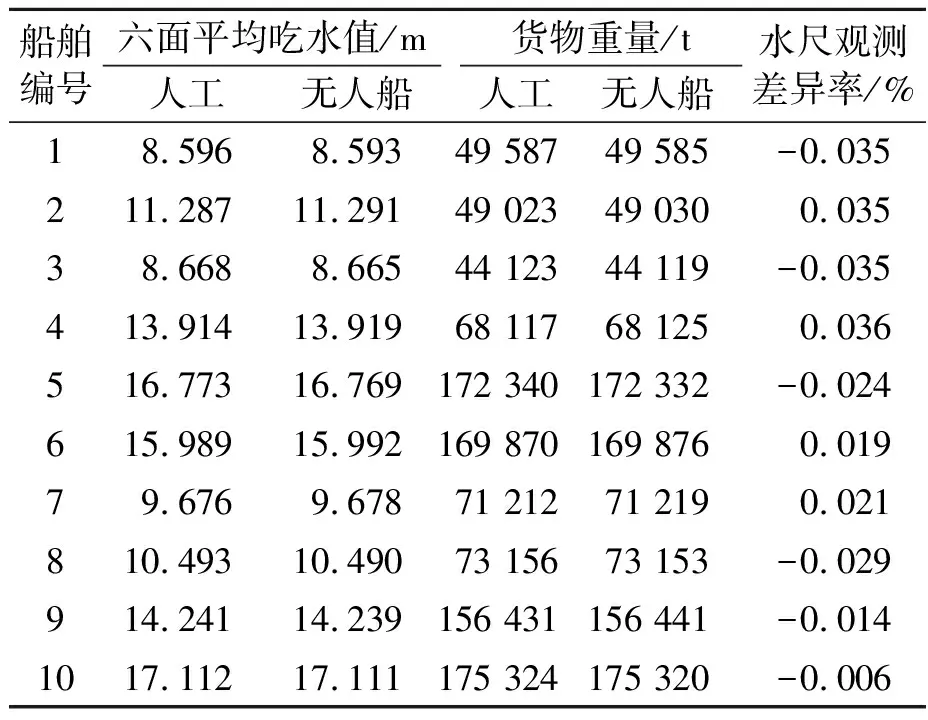
表3 無人船與人工觀測方法測試數據

表4 工作時效測試數據
無人船較人工觀測水尺的差異率N為
(5)
式中:M、K分別為自動裝置和人工測量值,m。
由表3和表4可見,10船次國際散貨船在無人船和傳統人工觀測平均水尺的差異范圍在0.001~0.005 m之間,平均差異率為0.003%,完全符合船舶制表的準確度在0.1%以內,水尺計重的準確度可在0.5%以內要求,無人船較人工觀測水尺方式,效能提高34%以上。
6 結論
基于水尺計重專用,改良水上平臺,船身采用塑料等材質,使無人船堅固、耐用;利用岸基系統,遠程操控無人船,運用激光雷達避障、圖像傳輸等技術,使其可精準到達指定位置;為無人船研制的水尺圖像識別軟件可智能給出吃水數值。
測試結果表明,運用無人船觀測船舶水尺,其誤差在規定范圍內,且較傳統人工水尺計重模式,效能得到顯著提升。
猜你喜歡
艦船科學技術(2022年14期)2022-09-22 03:08:26
艦船科學技術(2022年14期)2022-09-22 03:07:40
機械工業標準化與質量(2022年6期)2022-08-12 02:07:42
艦船科學技術(2022年2期)2022-03-29 01:12:44
船舶(2021年4期)2021-09-07 17:32:22
小哥白尼(趣味科學)(2019年10期)2020-01-18 09:16:22
船舶標準化工程師(2019年4期)2019-07-24 07:21:12
軍工文化(2017年12期)2017-07-17 06:08:06
中國船檢(2017年3期)2017-05-18 11:33:09
船海工程(2015年4期)2016-01-05 15:53:30