七功能水下液壓機械臂設(shè)計
2024-02-26 10:56:14趙飛姚震球凌宏杰
船海工程 2024年1期
趙飛,姚震球,凌宏杰
(1.鎮(zhèn)江市高等專科學(xué)校 電氣與信息學(xué)院,江蘇 鎮(zhèn)江 212028;2.江蘇科技大學(xué) 海洋裝備研究院,江蘇 鎮(zhèn)江 212003)
有纜遙控水下機器人(remotely operated vehicle,ROV)是探索海洋奧秘、開發(fā)海洋資源的重要設(shè)備。目前國內(nèi)水下機械臂的技術(shù)還尚未成熟,仍處于實驗研究階段,雖然研究人員在一定程度上解決了水下機械臂的設(shè)計、仿真,以及實驗問題[1-9],但部分作業(yè)型水下機器人搭載的作業(yè)機械臂,主要為通用型,針對性不強,尤其是配套水下采油樹作業(yè)的專用作業(yè)型機械臂尚無成熟產(chǎn)品。為此,針對水下采油樹作業(yè)需求,設(shè)計一種7功能水下液壓機械臂,并對其進行運動求解、仿真和實驗。
1 總體結(jié)構(gòu)和技術(shù)指標(biāo)
所設(shè)計的機械臂采用關(guān)節(jié)型鉸接結(jié)構(gòu),可實現(xiàn)包括偏轉(zhuǎn)和俯仰在內(nèi)的六自由度位置變化及抓取功能,與其他結(jié)構(gòu)形式機械臂相比具有占地面積小而動作范圍大的特點。該機械臂總體結(jié)構(gòu)見圖1,技術(shù)指標(biāo)見表1。
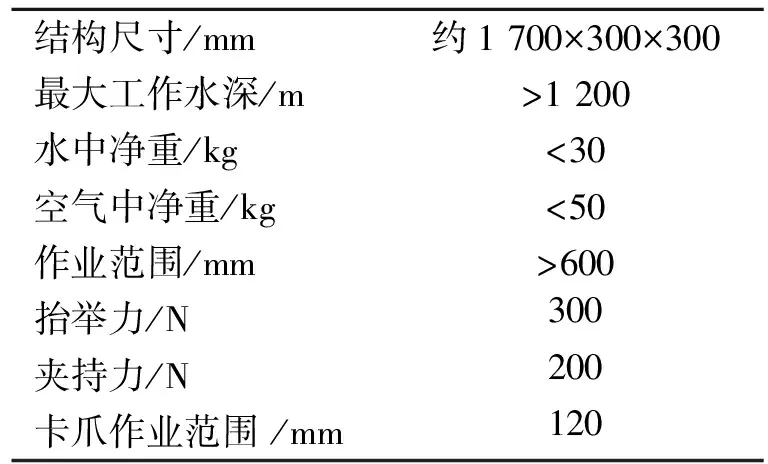
表1 機械臂設(shè)計指標(biāo)
圖1中的7功能機械臂包括6個活動關(guān)節(jié)和1個抓取卡爪,具體為6個活動關(guān)節(jié)的偏轉(zhuǎn)、俯仰和周向運動功能和卡爪的抓取功能。其中,第一關(guān)節(jié)、第五關(guān)節(jié)和第六關(guān)節(jié)為腕關(guān)節(jié);第二關(guān)節(jié)、第三關(guān)節(jié)和第四關(guān)節(jié)為肘關(guān)節(jié),抓取卡爪根據(jù)作業(yè)任務(wù)不同可選配,這里介紹設(shè)計的專用平動開合型抓取卡爪。
上述6個活動關(guān)節(jié)的設(shè)定技術(shù)指標(biāo)見表2。

表2 活動關(guān)節(jié)技術(shù)指標(biāo)
根據(jù)表2繪制機械臂的工作區(qū)域,見圖2。
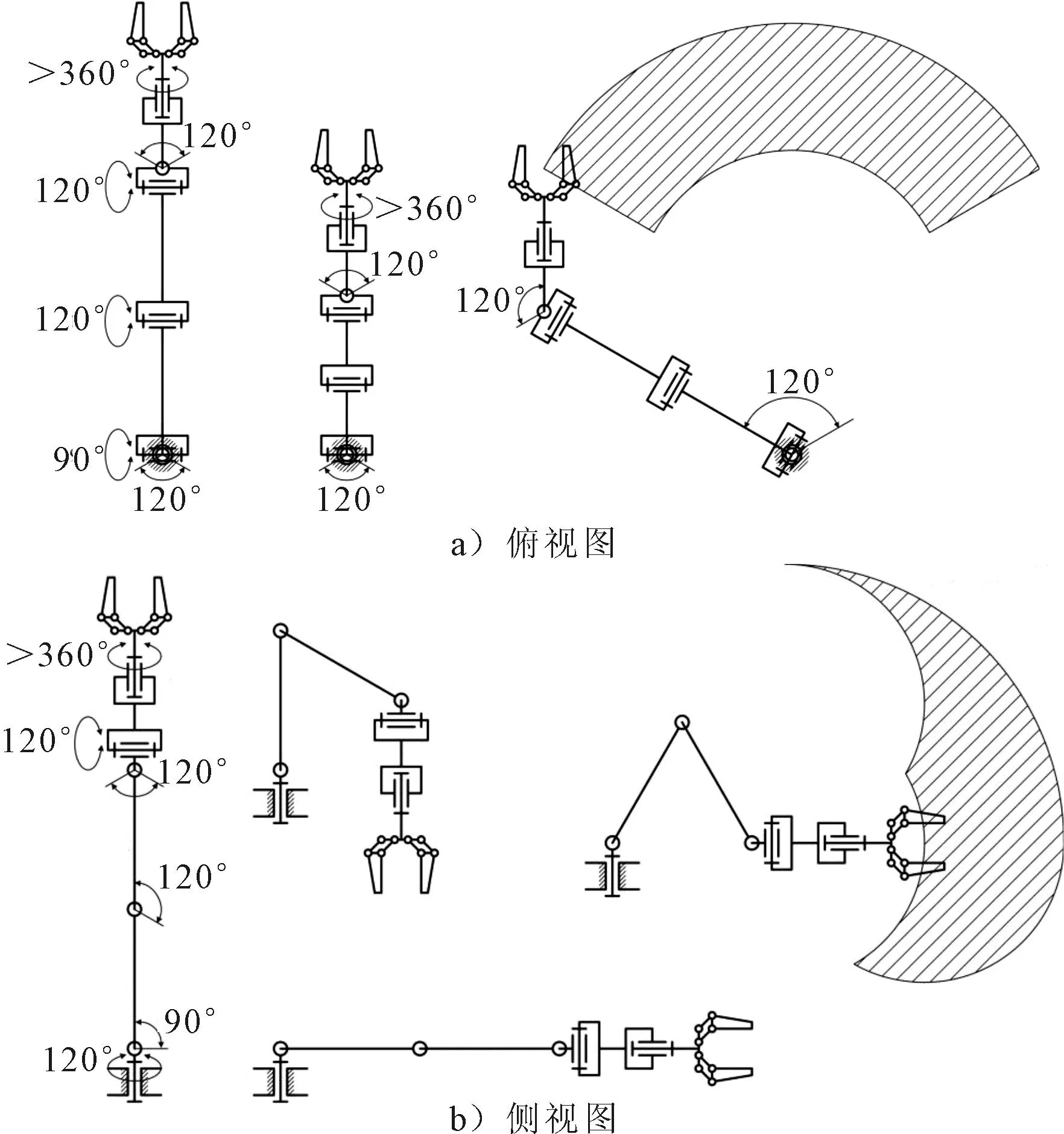
圖2 機械臂工作區(qū)域
2 結(jié)構(gòu)設(shè)計
活動關(guān)節(jié)簡化為擺動導(dǎo)桿機構(gòu),結(jié)合表1中的技術(shù)指標(biāo),進行結(jié)構(gòu)設(shè)計。
抓取卡爪采用四邊形機構(gòu)冗余設(shè)計,實現(xiàn)平動開合,卡爪的運動關(guān)系和受力分析見圖3。
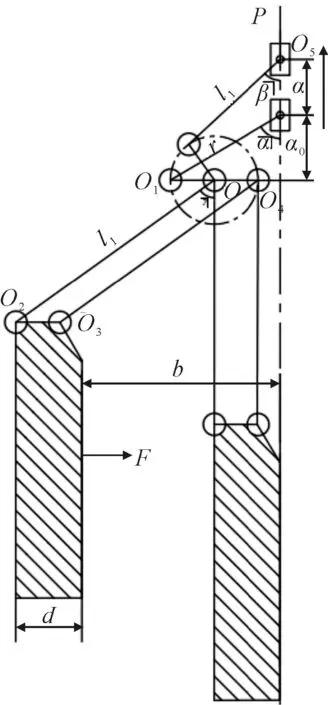
圖3 卡爪的運動關(guān)系和受力分析
開合距離2b與液壓缸行程a關(guān)系為
(1)
驅(qū)動力P與夾緊力F的關(guān)系為
(2)
以驅(qū)動力P最小和行程a最短為原則建立多目標(biāo)優(yōu)化模型,目標(biāo)函數(shù)為

(3)
約束函數(shù)為
(4)
根據(jù)表1 指標(biāo)和實際設(shè)計情況,為簡化計算,確定已知量:b=60 mm,d=18 mm,r=12 mm,α=600,μ=0.3。此時設(shè)計變量為l1、l2、γ及β共4個。
利用Matlab軟件計算并圓整可得:液壓缸行程最小為20 mm時,可以滿足抓取卡爪120 mm的開合范圍。
3 運動仿真分析
采用Matlab軟件建立機械臂的仿真模型,并對仿真模型進行校驗。首先,校驗機械臂各關(guān)節(jié)轉(zhuǎn)角為0時,其總長與Solidworks軟件設(shè)計的三維模型總長的一致性,校驗結(jié)果均為1.068 m,此時機械臂總長仿真校驗結(jié)果見圖4。
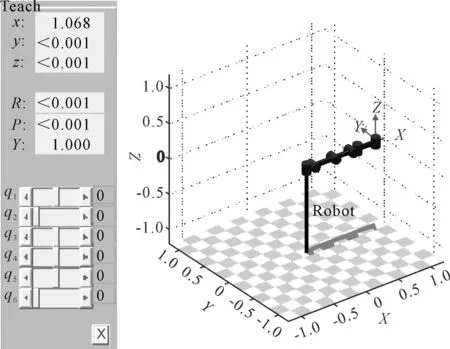
圖4 機械臂總長仿真校驗結(jié)果
然后,校驗機械臂由一個位置運動到另一個位置時的位置姿態(tài),為使計算簡便,選取校驗初始位置A各關(guān)節(jié)轉(zhuǎn)角為0°,目標(biāo)位置B關(guān)節(jié)轉(zhuǎn)角為[0pi/4-pi/60pi/60]。此時,機械臂正運動計算的末端位置矢量為
(5)
仿真校驗結(jié)果為
(6)
此時機械臂位置仿真校驗結(jié)果見圖5。
仿真模型結(jié)果與D-H參數(shù)法正運動求解結(jié)果高度一致,驗證了機械臂仿真模型是正確的,可以借助仿真模型對活動關(guān)節(jié)的運動軌跡進行分析,探討活動關(guān)節(jié)在運動過程中的位置、速度和加速度變化特征和規(guī)律。
假設(shè)各關(guān)節(jié)轉(zhuǎn)角為0時為初始位置A點,關(guān)節(jié)角度為[pi/6pi/-pi/6pi/6pi/6pi/2]時為目標(biāo)位置B點,由A點至點B,仿真的機械臂運動軌跡動畫見圖6,空間軌跡見圖7。
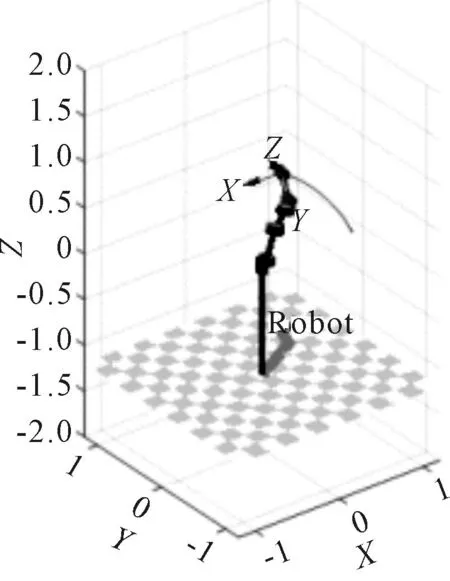
圖6 機械臂運動軌跡動畫

圖7 機械臂空間軌跡
由A點至B點,仿真的機械臂各關(guān)節(jié)位置變化見圖8,速度變化見圖9,加速度變化見圖10。

圖8 機械臂各關(guān)節(jié)位置變化
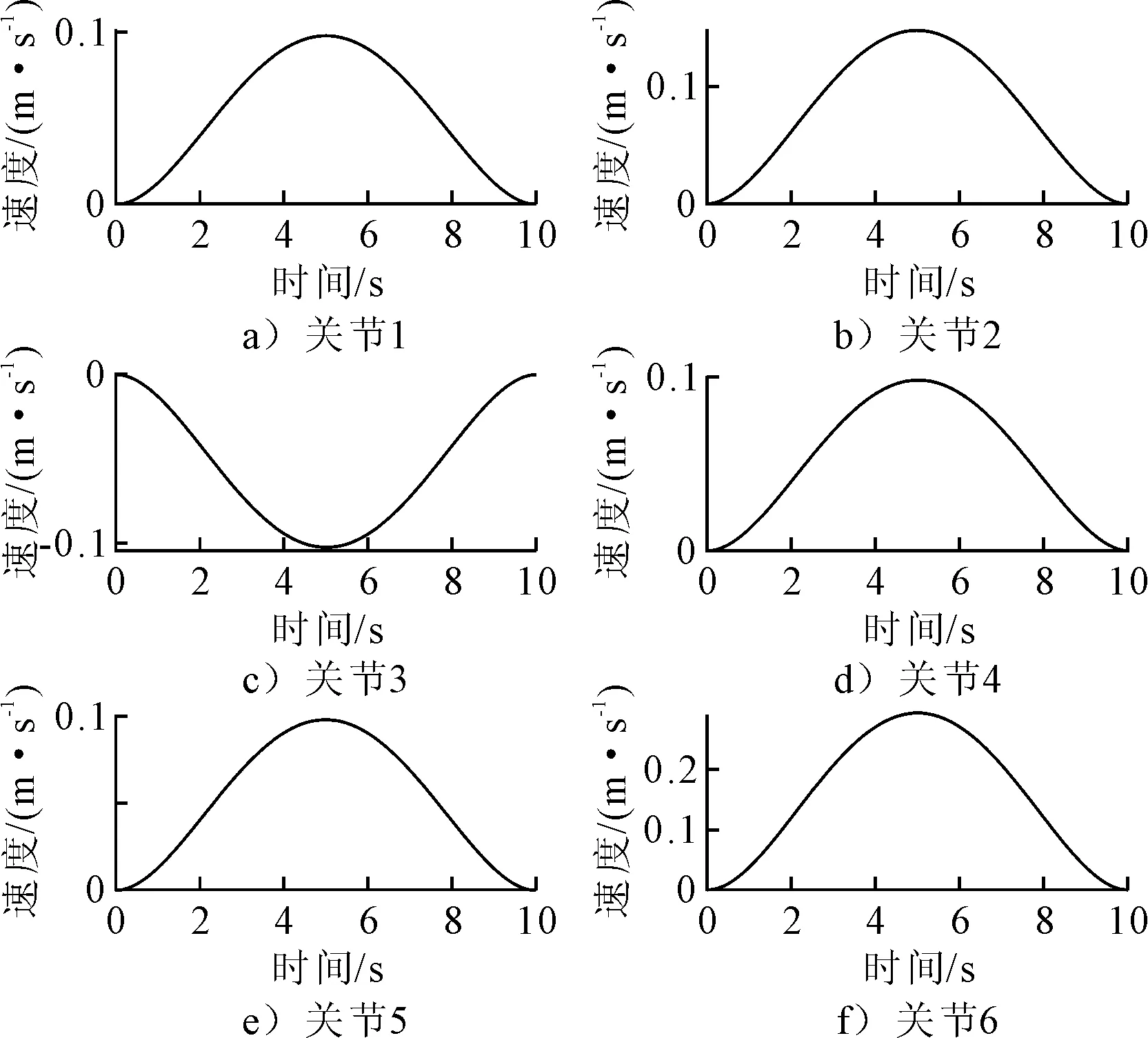
圖9 機械臂各關(guān)節(jié)速度變化
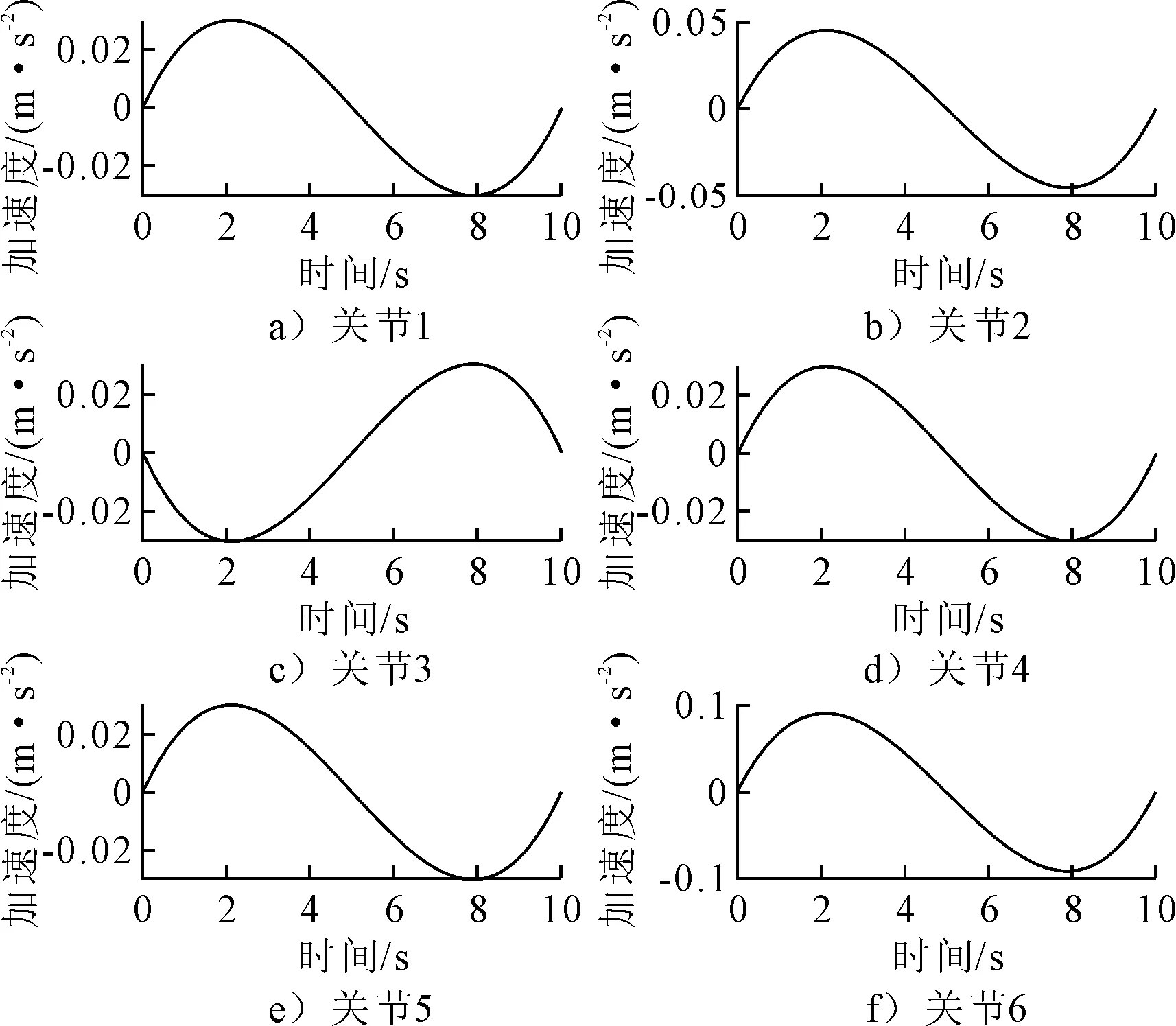
圖10 機械臂各關(guān)節(jié)加速度變化曲線
圖6~10表明,由A點至B點,機械臂各關(guān)節(jié)的角位移運動平穩(wěn),其速度和加速度曲線無突變,呈現(xiàn)正弦規(guī)律且相互對應(yīng),光滑平順。
4 試驗驗證
為驗證結(jié)構(gòu)設(shè)計和仿真的合理性,搭建機械臂的功能樣機,抓取卡爪的開合功能驗證見圖11。
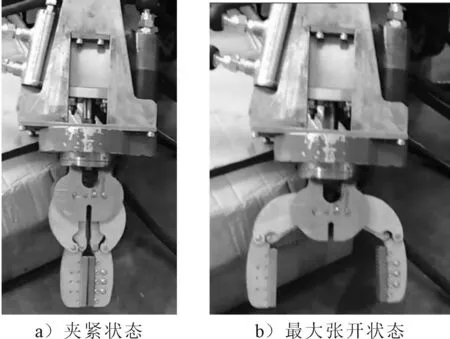
圖11 抓取卡爪開合運動
機械臂單自由度第六關(guān)節(jié)的周向旋轉(zhuǎn)運動見圖12。

圖12 第六關(guān)節(jié)周向旋轉(zhuǎn)運動
機械臂單自由度第五關(guān)節(jié)的偏轉(zhuǎn)運動見圖13。

圖13 第五關(guān)節(jié)偏轉(zhuǎn)運動
機械臂抓取卡爪開合功能和單關(guān)節(jié)運動驗證完成后,進一步進行機械臂的多關(guān)節(jié)聯(lián)動驗證,機械臂多關(guān)節(jié)聯(lián)動驗證見圖14。
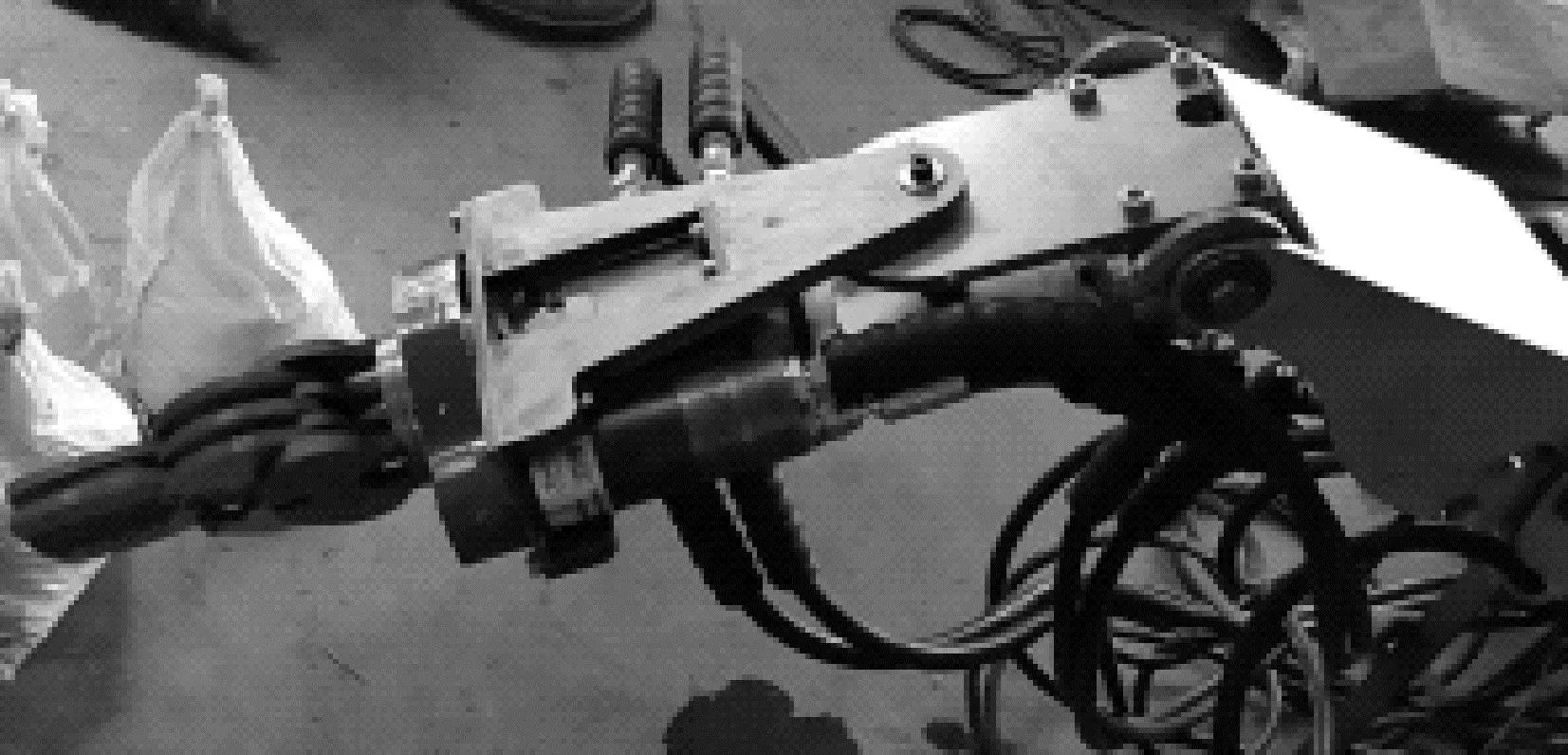
圖14 機械臂多關(guān)節(jié)聯(lián)動驗證
功能樣機驗證表明:設(shè)計的七功能水下液壓機械臂抓取卡爪可實現(xiàn)120 mm的開合范圍,各活動關(guān)節(jié)的運動范圍滿足設(shè)計指標(biāo),并且運動過程中各關(guān)節(jié)的加減速性能良好。
在上述試驗的基礎(chǔ)上進行結(jié)構(gòu)優(yōu)化設(shè)計,搭建工程化樣機,搭載設(shè)計的七功能機械臂的ROV樣機見圖15。
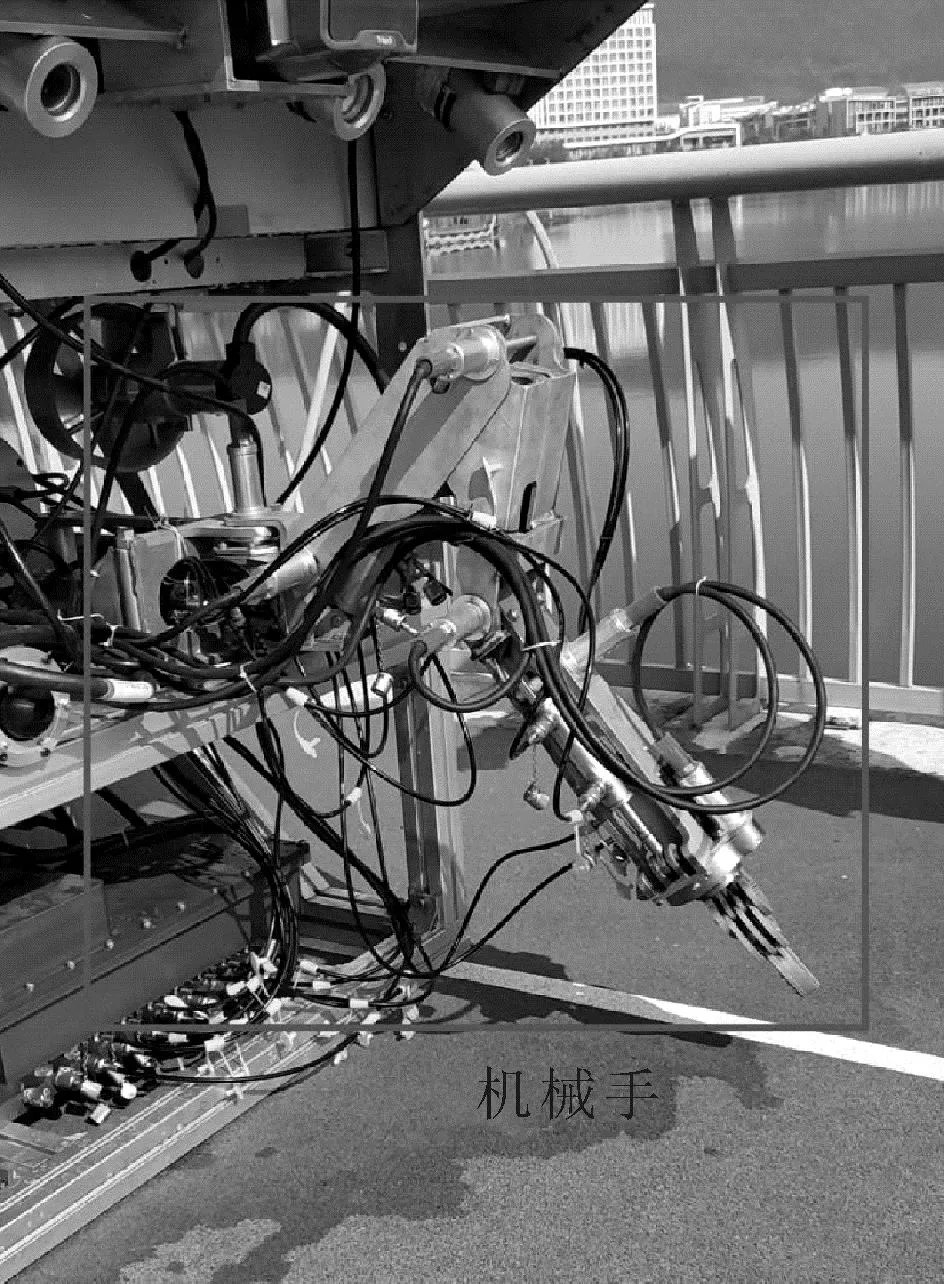
圖15 搭載機械臂的ROV樣機
在ROV設(shè)備上輸入機械臂抓取卡爪的開合控制指令,抓取卡爪可以按照指令完成開合動作,同時機械臂各關(guān)節(jié)可以根據(jù)控制指令隨動動作,機械臂第一關(guān)節(jié)和第二關(guān)節(jié)運動見圖16。
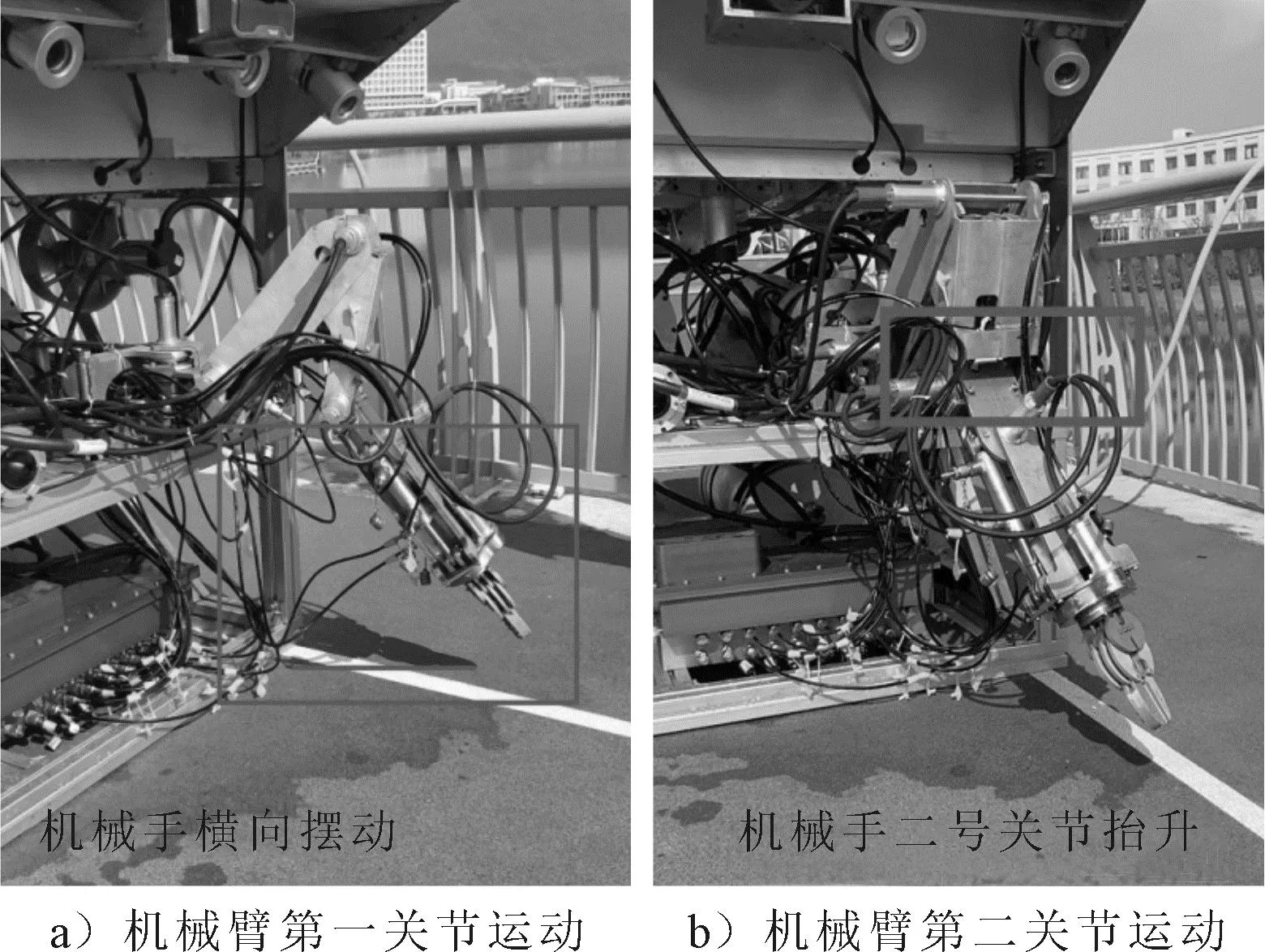
圖16 機械臂第一關(guān)節(jié)和第二關(guān)節(jié)運動
試驗表明,設(shè)計的7功能水下液壓機械臂可以滿足設(shè)計指標(biāo),符合ROV的水下作業(yè)要求。
5 結(jié)論
1)利用多目標(biāo)優(yōu)化模型設(shè)計抓取卡爪,求解的液壓缸驅(qū)動最短行程20 mm時,可滿足抓取卡爪120 mm的開合范圍。
2)仿真分析結(jié)果表明機械臂6個活動關(guān)節(jié)的位置、速度、加速度曲線在全部限界范圍內(nèi)均平滑、無突變,運動穩(wěn)定。
3)抓取卡爪開合范圍符合設(shè)計指標(biāo)要求,單自由度和多自由度陸上試驗及水下試驗驗證了機械臂含抓取卡爪的結(jié)構(gòu)設(shè)計是合理的。
為進一步擴展ROV的作業(yè)能力和作業(yè)范圍,后續(xù)將開展ROV上搭載雙機械臂的協(xié)同運動研究。
猜你喜歡
中華詩詞(2022年6期)2022-12-31 06:41:24
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
當(dāng)代工人(2020年8期)2020-05-25 09:07:38
小溪流(畫刊)(2017年12期)2018-01-10 16:07:29
中國科技論壇(2017年7期)2017-07-25 08:49:53
故事大王(2016年7期)2016-09-22 17:30:08
科技知識動漫(2016年8期)2016-07-29 20:40:09
兒童故事畫報·發(fā)現(xiàn)號趣味百科(2015年12期)2016-01-25 00:41:49
中國中醫(yī)藥現(xiàn)代遠(yuǎn)程教育(2014年22期)2014-03-01 04:32:55
中國中醫(yī)藥現(xiàn)代遠(yuǎn)程教育(2014年16期)2014-03-01 04:28:54