基于車載移動(dòng)測(cè)量系統(tǒng)的高精地圖制作
2024-02-24 14:46:16黃華東李冉馬宏陽(yáng)胡帥朋
資源導(dǎo)刊(信息化測(cè)繪) 2024年1期
關(guān)鍵詞:測(cè)量
黃華東 李冉 馬宏陽(yáng) 胡帥朋
(1.中汽創(chuàng)智科技有限公司,江蘇 南京 210000;2.中國(guó)科學(xué)院空天信息創(chuàng)新研究院,北京 海淀 100094;3.南京工業(yè)大學(xué),江蘇 南京 210000)
1 引言
高精地圖(HD Map,High Definition Map)與標(biāo)準(zhǔn)地圖(SD Map,Standard Definition Map)有著本質(zhì)區(qū)別。標(biāo)準(zhǔn)地圖使用主體是人,主要作用為導(dǎo)航和搜索,數(shù)據(jù)主體是道路,提供米級(jí)道路級(jí)別分辨率的道路形狀和興趣點(diǎn)數(shù)據(jù)。高精地圖使用主體是機(jī)器,主要作用為輔助定位、超視距感知、先驗(yàn)路徑規(guī)劃和決策,數(shù)據(jù)主體是車道,提供分米級(jí)車道級(jí)別分辨率的更為豐富的車道幾何和道路設(shè)施等數(shù)據(jù)。高精地圖具備位置精度高、要素豐富度高和數(shù)據(jù)鮮度高等特點(diǎn)[1]。
車載移動(dòng)測(cè)量系統(tǒng)集成了全球?qū)Ш叫l(wèi)星系統(tǒng)(GNSS,Global Navigation Satellite System)、慣性導(dǎo)航系統(tǒng)(INS,Inertial Navigation System)、激光三維雷達(dá)系統(tǒng)(LiDAR,Light Detection And Ranging)、圖像傳感器(CCD,Charge Coupled Device)、距離傳感器(DMI,Distance Measure Instrument)、工控機(jī)(IPC,Industrial Personal Computer)等高精度傳感器或先進(jìn)技術(shù),可在高速移動(dòng)中快速獲取高精度位置及姿態(tài)信息、高密度三維點(diǎn)云與高清影像數(shù)據(jù)。車載移動(dòng)測(cè)量系統(tǒng)具備高精度、高效率、數(shù)據(jù)成果豐富等特點(diǎn),廣泛應(yīng)用于傳統(tǒng)測(cè)繪、智慧城市、智慧交通、智能駕駛等領(lǐng)域[2,3]。
國(guó)內(nèi)外已開(kāi)展基于車載移動(dòng)測(cè)量系統(tǒng)的高精地圖制作相關(guān)研究與應(yīng)用,詳細(xì)介紹了制作部分流程,但未系統(tǒng)性、全局性、標(biāo)準(zhǔn)化研究從外業(yè)采集至高精地圖應(yīng)用過(guò)程中的主要關(guān)鍵技術(shù)、流程與成果[4-11]。本文基于車載移動(dòng)測(cè)量系統(tǒng),設(shè)計(jì)一套采集、處理、制圖、編譯全流程的高精地圖制作關(guān)鍵技術(shù)及工作模式,實(shí)現(xiàn)全流程標(biāo)準(zhǔn)化、部分流程自動(dòng)化,可快速、準(zhǔn)確、高效實(shí)現(xiàn)高精地圖的采集、處理和建模等工作。
2 總體流程
高精地圖制作主要分為4 個(gè)一級(jí)流程、13 個(gè)二級(jí)流程及若干三級(jí)流程,總體制圖流程如圖1 所示。外業(yè)數(shù)據(jù)采集主要包括:測(cè)區(qū)內(nèi)控制點(diǎn)坐標(biāo)采集、基準(zhǔn)站觀測(cè)數(shù)據(jù)采集、流動(dòng)站數(shù)據(jù)采集。數(shù)據(jù)預(yù)處理主要包括:組合導(dǎo)航解算、點(diǎn)云數(shù)據(jù)解算、影像數(shù)據(jù)解算、數(shù)據(jù)整理及數(shù)據(jù)質(zhì)檢。編輯制圖主要包括:道路幾何及屬性制作、對(duì)象幾何及屬性制作、制圖成果數(shù)據(jù)質(zhì)檢、問(wèn)題批處理解決。地圖編譯主要包括 :編譯格式確定、編譯方式選擇。

圖1 總體流程
3 外業(yè)數(shù)據(jù)采集
3.1 系統(tǒng)介紹
該車載移動(dòng)測(cè)量系統(tǒng)由載體、傳感器、供電系統(tǒng)等部分組成,適應(yīng)于高速與城市道路等應(yīng)用場(chǎng)景,如圖2 所示。IMU 使用天寶Applanix LVX,主、副GNSS 天線使用CSX601A,斜置、平置LiDAR 使用禾賽Pandar XT32,六個(gè)Camera 使用海康威視MV-CA050。在高速行駛采集場(chǎng)景(速度大于70 公里/小時(shí)),激光線間距不大于3cm,后處理軌跡定位精度優(yōu)于5cm,點(diǎn)云三維絕對(duì)精度優(yōu)于15cm。

圖2 車載移動(dòng)測(cè)量系統(tǒng)
3.2 定位原理
由于系統(tǒng)內(nèi)部傳感器安裝過(guò)程中存在位置及方向誤差,在系統(tǒng)研制后需要對(duì)各類傳感器的內(nèi)部參數(shù)及不同傳感器之間的外部參數(shù)進(jìn)行標(biāo)定[12]。GNSS 外參為天線至慣導(dǎo)中心的偏移量(Tx、Ty、Tz)和旋轉(zhuǎn)角(Rx、Ry、Rz)等參數(shù),坐標(biāo)系為地球坐標(biāo)系(WGS-84)。激光雷達(dá)內(nèi)參包括線束、高度、方位角等參數(shù)。激光雷達(dá)外參為傳感器至慣導(dǎo)中心的偏移量(Tx、Ty、Tz)和旋轉(zhuǎn)角(Rx、Ry、Rz)等參數(shù)。坐標(biāo)系為激光掃描坐標(biāo)系。DMI 參數(shù)為車輪行駛一周的長(zhǎng)度。相機(jī)內(nèi)參包括焦距(fx、fy)、主點(diǎn)(cx、cy)、徑向畸變(k1、k2、k3、k4、k5)、切向畸變(p1、p2)等參數(shù);相機(jī)外參為傳感器至慣導(dǎo)中心的偏移量(Tx、Ty、Tz)和旋轉(zhuǎn)角(Rx、Ry、Rz)等參數(shù),坐標(biāo)系為像素坐標(biāo)系。
在進(jìn)行數(shù)據(jù)處理時(shí),需要將不同傳感器坐標(biāo)系進(jìn)行轉(zhuǎn)換,轉(zhuǎn)換為WGS-84 大地坐標(biāo)系或高斯投影后的空間直角坐標(biāo)系,用于后續(xù)編輯制圖工作。根據(jù)高精地圖最終成果要求,選擇性地進(jìn)行不同橢球基準(zhǔn)、不同投影方式之間的轉(zhuǎn)換。車載移動(dòng)測(cè)量系統(tǒng)掃描定位原理如圖3 所示。

圖3 車載移動(dòng)測(cè)量系統(tǒng)掃描定位原理
在KL時(shí)刻,車載移動(dòng)測(cè)量系統(tǒng)嚴(yán)密定位方程如公式(1)所示。
公式中:λ為尺度因子,XL為地物點(diǎn)P在LiDAR坐標(biāo)系中的坐標(biāo)向量,XW為地物點(diǎn)P在WGS-84 坐標(biāo)系中的坐標(biāo)向量。
X IW為IMU 坐標(biāo)系原點(diǎn)在WGS-84 坐標(biāo)系中的坐標(biāo)向量。
RwI為IMU 坐標(biāo)系至WGS-84 坐標(biāo)系的旋轉(zhuǎn)矩陣。
其中,(r,p,h)為組合導(dǎo)航解算處理后對(duì)應(yīng)時(shí)刻的滾動(dòng)角、俯仰角和偏航角。
XL I為L(zhǎng)iDAR 坐標(biāo)系原點(diǎn)在IMU 坐標(biāo)系中的偏移量。
RL I為L(zhǎng)iDAR 坐標(biāo)系與IMU 坐標(biāo)系之間的旋轉(zhuǎn)矩陣。
3.3 規(guī)劃與采集
基準(zhǔn)站可分為CORS 站、虛擬參考站或自架GNSS接收機(jī)三類,針對(duì)采集區(qū)域大小,需確定基準(zhǔn)站數(shù)量,根據(jù)數(shù)據(jù)質(zhì)量等級(jí),可在每10~30km 覆蓋范圍內(nèi)設(shè)立一座基準(zhǔn)站。根據(jù)測(cè)區(qū)路網(wǎng)圖,需要現(xiàn)場(chǎng)踏勘,采集路徑規(guī)劃[13],確保采集過(guò)程中以最少的重復(fù)路線采集較為全面的車道數(shù)據(jù),減少數(shù)據(jù)冗余,提高預(yù)處理效率,降低因重復(fù)采集導(dǎo)致的點(diǎn)云分層。為檢查點(diǎn)云成果絕對(duì)精度,需在測(cè)區(qū)布設(shè)控制點(diǎn),應(yīng)使用RTK 或全站儀布設(shè)高等級(jí)平面控制點(diǎn)與高程控制點(diǎn)。
采集過(guò)程中應(yīng)重點(diǎn)注意:( 1 )基準(zhǔn)站觀測(cè)起止時(shí)間應(yīng)覆蓋流動(dòng)站測(cè)量時(shí)間,確保組合導(dǎo)航解算正常進(jìn)行。(2)基準(zhǔn)站坐標(biāo)值應(yīng)布設(shè)在控制點(diǎn)上,以提高數(shù)據(jù)整體精度。( 3 )采集開(kāi)始前及結(jié)束后應(yīng)對(duì)慣導(dǎo)進(jìn)行靜止等初始化操作,以提高慣導(dǎo)數(shù)據(jù)精度。(4)在隧道、高架下或城市峽谷區(qū)域,可增設(shè)控制點(diǎn),用于數(shù)據(jù)質(zhì)量評(píng)定及提升。(5)在GNSS 信號(hào)丟失區(qū)域,應(yīng)盡量勻速、快速駛離,至開(kāi)闊處重新接收位置信息,減少慣導(dǎo)累計(jì)誤差。( 6 )應(yīng)盡量避免流動(dòng)站周圍其他車輛影響,減少因遮擋導(dǎo)致的點(diǎn)云空洞。本次采集實(shí)際路線、布設(shè)控制點(diǎn)及測(cè)區(qū)影像底圖(部分)如圖4 所示。

圖4 行車軌跡、控制點(diǎn)與影像底圖
4 數(shù)據(jù)處理及制圖
4.1 組合導(dǎo)航解算
POSPac MMS 是天寶Applanix 最新一代的GNSS輔助慣性導(dǎo)航后處理軟件。使用POSPac IN-Fusion Single Base 技術(shù)對(duì)采集POS 原始數(shù)據(jù)進(jìn)行組合導(dǎo)航解算,融合北斗、GPS、GLONASS、GALILEO 等全球衛(wèi)星定位系統(tǒng),將流動(dòng)站及基準(zhǔn)站采集的數(shù)據(jù)進(jìn)行后處理差分動(dòng)態(tài)定位,對(duì)GNSS、IMU、DMI 數(shù)據(jù)進(jìn)行緊耦合處理,消除GNSS 信號(hào)失鎖帶來(lái)的影響,消除IMU 長(zhǎng)時(shí)間累積誤差,實(shí)現(xiàn)高精度的定位、定姿及定速。本次采集基線長(zhǎng)度在0.5km 至1.6km 之間。基準(zhǔn)站與流動(dòng)站同時(shí)接收到的衛(wèi)星顆數(shù)為 :GPS衛(wèi)星顆數(shù)為3~10顆,平均為9 顆;北斗衛(wèi)星為2~7 顆,平均為6 顆。基準(zhǔn)站位置及流動(dòng)站POS 軌跡如圖5 所示。
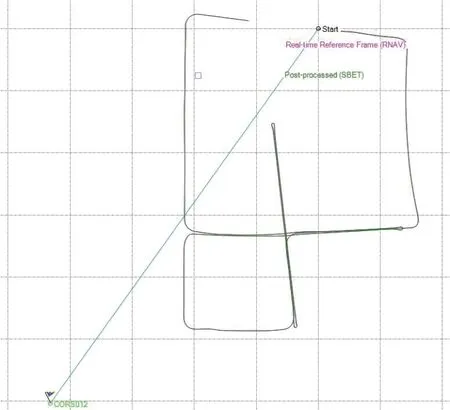
圖5 基準(zhǔn)站與流動(dòng)站POS軌跡
處理結(jié)束后,生成POST 軌跡文件(sbet_Trace.out),包含時(shí)間、坐標(biāo)、速度分量、滾動(dòng)角、俯仰角和偏航角等信息。將二進(jìn)制文件轉(zhuǎn)為Text 格式數(shù)據(jù)或SpatialLite 數(shù)據(jù)庫(kù)文件,進(jìn)行水平、高程、姿態(tài)跳變檢查及修復(fù),減少因軌跡跳變導(dǎo)致的點(diǎn)云跳變。對(duì)本次處理的POST 數(shù)據(jù)進(jìn)行質(zhì)量評(píng)價(jià),北、東方向中誤差平均約1.2cm,地/下方向中誤差平均約2.8cm,完全符合高精地圖制作基礎(chǔ)數(shù)據(jù)的精度要求。三方向中誤差分布如圖6 所示。
4.2 相片解算
依據(jù)POST 軌跡文件、相片至慣導(dǎo)外參,生成六個(gè)相機(jī)軌跡文件,包含序號(hào)、照片名稱、時(shí)間、經(jīng)緯度、平面坐標(biāo)、高程、俯仰角、翻滾角、偏航角等信息。通過(guò)相機(jī)軌跡文件,將每張照片與點(diǎn)云成果、軌跡成果相匹配,便于后期快速查找、瀏覽,可將相片像素RGB 值賦于對(duì)應(yīng)點(diǎn)云上,制作真彩色點(diǎn)云成果。解算后相片如圖7 所示,自左而右、自上而下相片位置依次為左前視、前視、右前視、左后視、后視、右后視。

圖7 各視角相片
4.3 點(diǎn)云解算
點(diǎn)云數(shù)據(jù)作為高精地圖制作的最重要基礎(chǔ)數(shù)據(jù),點(diǎn)云完整性、準(zhǔn)確性決定了高精地圖的要素覆蓋度與位置精度。原始激光點(diǎn)云數(shù)據(jù)需經(jīng)過(guò)數(shù)據(jù)解析、坐標(biāo)轉(zhuǎn)換(將點(diǎn)云坐標(biāo)轉(zhuǎn)換為高斯投影后的空間直角坐標(biāo))、點(diǎn)云去噪(減少空中噪點(diǎn))、距離過(guò)濾(減少距離或高度閾值外冗余點(diǎn)云)、速度過(guò)濾(減少停車時(shí)額外采集的冗余點(diǎn)云)、點(diǎn)云自動(dòng)配準(zhǔn)(減少重復(fù)采集區(qū)域內(nèi)點(diǎn)云分層或點(diǎn)云重影,提升點(diǎn)云相對(duì)精度)、點(diǎn)云手動(dòng)糾偏(提升點(diǎn)云絕對(duì)精度)、地面非地面分割(便于編輯制圖點(diǎn)云渲染展示)、點(diǎn)云分類(高精地圖自動(dòng)化制作基礎(chǔ))、數(shù)據(jù)分幅(按照標(biāo)準(zhǔn)圖幅分割為若干單幅數(shù)據(jù))、索引創(chuàng)建(快速渲染)等處理,形成下一環(huán)節(jié)可輸入的標(biāo)準(zhǔn)格式數(shù)據(jù)。解算后的點(diǎn)云成果如圖8 所示,自左而右、自上而下依次為整體點(diǎn)云、地面點(diǎn)云、非地面點(diǎn)云。

圖8 點(diǎn)云成果
4.4 編輯制圖
在通用GIS 平臺(tái)或?qū)I(yè)數(shù)據(jù)編輯制圖平臺(tái)中,按高精地圖數(shù)據(jù)標(biāo)準(zhǔn),通過(guò)人工、半自動(dòng)、全自動(dòng)方式制作高精地圖[14-18],包含道路、交通設(shè)施等要素,限速、轉(zhuǎn)向、線類型等屬性,以及交通燈與停止線、道路參考線與道路邊界線等關(guān)聯(lián)關(guān)系。制作結(jié)束后,應(yīng)進(jìn)行值域、拓?fù)潢P(guān)系、關(guān)聯(lián)關(guān)系等內(nèi)容的自動(dòng)檢查與修復(fù)。
地圖成果格式為SpatiaLite 數(shù)據(jù)庫(kù),支持開(kāi)放地理空間協(xié)會(huì)標(biāo)準(zhǔn)(OGC,Open Geospatial Consortium),可使用ArcGIS、QGIS、FME 等軟件編輯。高精地圖成果與影像底圖疊加展示如圖9 所示,高精地圖成果與點(diǎn)云成果疊加展示如圖10 所示。

圖9 高精地圖與影像底圖

圖10 高精地圖與點(diǎn)云成果
4.5 精度分析
在車載移動(dòng)測(cè)量作業(yè)前后,選取地面或交通設(shè)施的拐角點(diǎn)或頂點(diǎn)等明顯特征點(diǎn)[19-21],使用全站儀、RTK 測(cè)量,獲取高精度控制點(diǎn)三維坐標(biāo)。將點(diǎn)云成果或高精地圖成果與控制點(diǎn)進(jìn)行疊加,如圖11 所示。

圖11 點(diǎn)云成果與控制點(diǎn)疊加
高精地圖成果坐標(biāo)精度計(jì)算如表1 所示,高精地圖成果坐標(biāo)精度統(tǒng)計(jì)如表2 所示,誤差分布如圖12 所示。通過(guò)分析可得,平面誤差平均值為4.3cm,中誤差為2cm,高程誤差平均值為3.2cm,中誤差為2.5cm,成果數(shù)據(jù)完全滿足高精地圖厘米級(jí)或分米級(jí)要求。

表1 成果坐標(biāo)精度計(jì)算
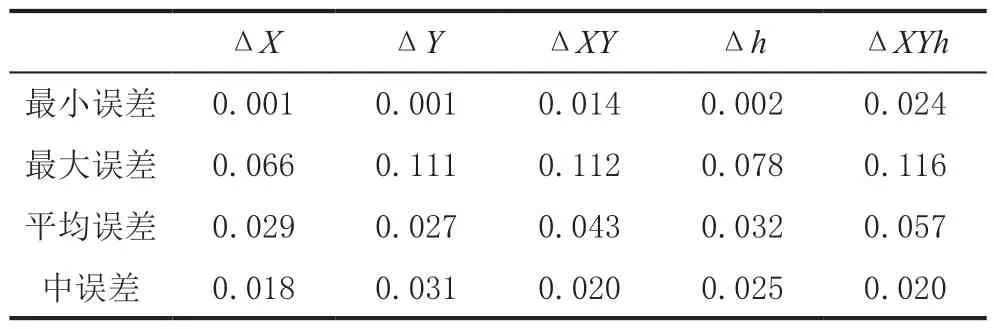
表2 成果坐標(biāo)精度統(tǒng)計(jì)
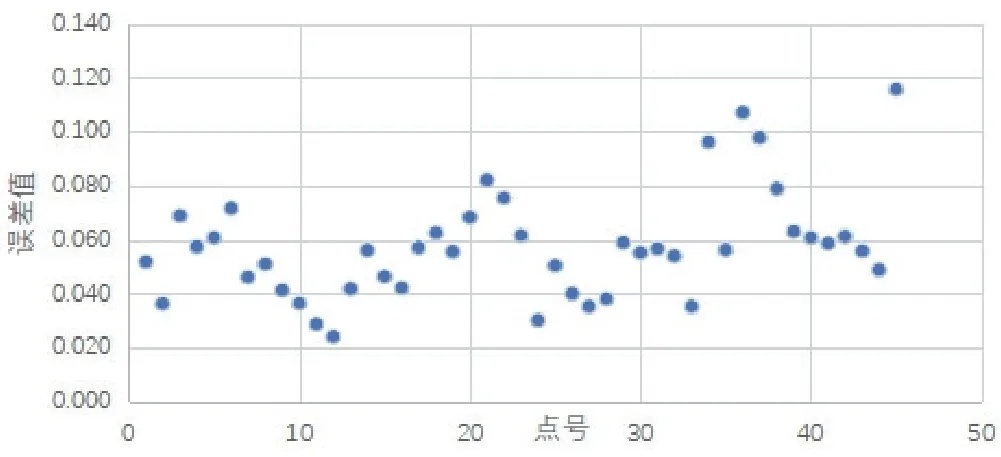
圖12 誤差值分布
5 地圖編譯
高精地圖的標(biāo)準(zhǔn)格式主要有NDS、OpenDrive、Apollo OpenDrive 等[22]。其中,OpenDrive 是目前國(guó)際上比較通用的一種格式規(guī)范,描述了駕駛仿真應(yīng)用所需要的靜態(tài)道路交通網(wǎng)絡(luò),并提供標(biāo)準(zhǔn)交換格式,使用可擴(kuò)展標(biāo)記語(yǔ)言(XML)描述道路網(wǎng)絡(luò)的基礎(chǔ),文件拓展名為xodr,數(shù)據(jù)涵蓋了道路的幾何形狀,以及可影響路網(wǎng)邏輯的相關(guān)特征,例如車道和標(biāo)志。同時(shí),還能保證不同應(yīng)用之間在交換數(shù)據(jù)時(shí)的互通性,可以真實(shí)模擬車輛在道路上行駛,用于高級(jí)輔助駕駛系統(tǒng)(ADAS)功能開(kāi)發(fā)和驗(yàn)證。將SpatiaLite 成果編譯為OpenDrive 格式,OpenDrive 格式高精地圖可視化效果如圖13 所示。

圖13 OpenDrive格式高精地圖
6 結(jié)語(yǔ)
高精地圖是保障智能駕駛系統(tǒng)穩(wěn)定、安全、高效的重要一環(huán),在智能駕駛中起到輔助感知、輔助定位、輔助規(guī)劃、輔助控制等重要作用。本文通過(guò)具體工程實(shí)踐,詳細(xì)闡述了基于車載移動(dòng)測(cè)量系統(tǒng)的高精地圖制作原理及關(guān)鍵步驟,通過(guò)控制點(diǎn)驗(yàn)證,精度完全符合高精地圖技術(shù)規(guī)格要求,將制圖成果編譯為國(guó)際通用標(biāo)準(zhǔn)格式,為不同OEM、Tier1 的智能駕駛開(kāi)發(fā)、測(cè)試、仿真提供了標(biāo)準(zhǔn)化信息保障。
猜你喜歡
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2019年9期)2019-11-25 07:33:02
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2019年3期)2019-04-25 06:20:54
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2018年3期)2018-05-31 08:52:45
數(shù)學(xué)小靈通(1-2年級(jí))(2017年10期)2017-11-08 08:39:45
少兒科學(xué)周刊·兒童版(2016年1期)2016-03-14 03:52:21
