基于機(jī)器視覺的軸承識別與定位算法研究
2024-02-21 03:50:06余浪苗鴻賓蘇赫朋申光鵬
機(jī)械制造與自動化 2024年1期
余浪,苗鴻賓,b,蘇赫朋,申光鵬
(中北大學(xué) a. 機(jī)械工程學(xué)院; b. 山西省深孔加工工程技術(shù)研究中心,山西 太原 030051)
0 引言
軸承是機(jī)械設(shè)備中一種重要的零部件,主要用于支撐機(jī)械旋轉(zhuǎn)體,降低其運動過程中的摩擦因數(shù)并保證其回轉(zhuǎn)精度,故被應(yīng)用于不同的機(jī)械裝置中。軸承的質(zhì)量關(guān)系著整個裝置的運行狀態(tài)和使用壽命,所以在軸承的生產(chǎn)過程中需對軸承的多項參數(shù)進(jìn)行質(zhì)量檢測以及尺寸測量[1]。
基于機(jī)器視覺的快捷,靈活,抗干擾能力強(qiáng)以及可編程控制等特點,機(jī)器視覺技術(shù)在工業(yè)生產(chǎn)上得到了越來越多的應(yīng)用[2],結(jié)合機(jī)器視覺對軸承進(jìn)行質(zhì)量檢測以及尺寸測量等操作也一直是自動化技術(shù)領(lǐng)域的研究熱點。白芳等[3]為了提高對軸承的測量精度以及測量的速度,結(jié)合機(jī)器視覺技術(shù)設(shè)計了一種針對軸承的檢測系統(tǒng),實現(xiàn)了對軸承的定位、多位置的尺度測量以及軸承表面的缺陷檢測。林海波等[4]為了能夠更加準(zhǔn)確地定位到微小軸承的位置信息,在處理微小軸承圖像的過程中,通過局部區(qū)域特征的三次曲線模型求解軸承圖像的內(nèi)外圈邊緣亞像素信息,并以此計算得到更精確的圖像邊緣信息。溫學(xué)軍等[5]通過軸承圖像的灰度函數(shù)圖以及一階導(dǎo)數(shù)圖來對軸承滾動體的缺失進(jìn)行檢測判斷。
工業(yè)生產(chǎn)中在對軸承進(jìn)行各項參數(shù)檢測時,受現(xiàn)場工況的影響,待檢測的軸承會在一定程度上偏離原先固定的位置,若此時繼續(xù)對軸承進(jìn)行質(zhì)量檢測以及尺寸測量將導(dǎo)致檢測的結(jié)果出現(xiàn)較大的偏差。基于此,為了保證軸承各項參數(shù)的檢測準(zhǔn)確性,本文提出一種基于機(jī)器視覺的軸承識別與定位算法,通過設(shè)置軸承的模板圖像以及檢測閾值,結(jié)合圖像的Hu不變矩特征對軸承進(jìn)行識別匹配;通過最小二乘法對圖像的邊緣點進(jìn)行圓擬合并采用迭代法進(jìn)行修正,通過計算圓心的位置坐標(biāo),實現(xiàn)對待檢測軸承的定位。該方法可有效地識別、定位目標(biāo)軸承,提高對軸承各項參數(shù)的檢測精度。
1 算法流程
本文以NSK 6204Z軸承作為研究對象。NSK 6204Z軸承是一種深溝球軸承,用于模具標(biāo)準(zhǔn)件、壓力機(jī)、 冷沖壓設(shè)備等。本文基于機(jī)器視覺對待檢測軸承進(jìn)行識別與定位的算法流程如圖1所示。要實現(xiàn)對軸承的準(zhǔn)確識別與定位,主要關(guān)鍵步驟包括:1)圖像采集,調(diào)試視覺系統(tǒng)采集目標(biāo)圖像;2)圖像預(yù)處理,消除與圖像識別定位無關(guān)的圖像信息以及噪聲干擾;3)圖像外輪廓邊緣特征的提取;4)對目標(biāo)軸承進(jìn)行準(zhǔn)確的識別判斷以及定位計算。
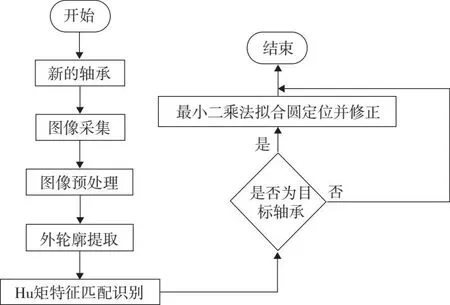
圖1 算法流程
2 軸承識別定位算法
2.1 圖像預(yù)處理
圖像預(yù)處理的目的是為了消除圖像中多余的圖像信息以及由環(huán)境因素影響所帶來的干擾信息,突出感興趣的圖像區(qū)域,同時達(dá)到簡化圖像數(shù)據(jù)以及增強(qiáng)目標(biāo)圖像特征的目的。本文對軸承圖像的預(yù)處理流程如圖2所示[6]。

圖2 圖像預(yù)處理
因為在對圖像進(jìn)行識別與定位的過程中只需考慮圖像的形狀特征而不需要考慮圖像的顏色特征,所以在對軸承圖像進(jìn)行識別定位之前需對其進(jìn)行灰度化處理。灰度化圖像能達(dá)到簡化圖像,同時減少圖像特征提取的時間,提高圖像識別定位的速度[7],灰度化效果如圖3所示。

圖3 圖像灰度化
2)圖像濾波
在采集圖像的過程中,受環(huán)境因素的影響,采集到的圖像中往往會存在干擾的圖像噪聲,而這些噪聲的存在會影響圖像特征的提取效果。所以本文采用中值濾波算法對軸承圖像進(jìn)行濾波處理。中值濾波在對圖像進(jìn)行濾波處理的過程中不僅能夠有效地對突變噪聲進(jìn)行降噪處理,同時能夠很好地保存圖像中的邊緣特征[8],濾波效果如圖4所示。

圖4 中值濾波
3)圖像閾值分割
對圖像進(jìn)行閾值分割的目的是為了突出圖像中感興趣的區(qū)域,為后續(xù)的圖像識別定位計算做好準(zhǔn)備。圖像閾值分割的過程主要通過設(shè)定閾值T來對圖像進(jìn)行二值化處理。在對圖像進(jìn)行閾值分割之前,首先對目標(biāo)圖像進(jìn)行灰度直方圖的統(tǒng)計,如圖5所示。根據(jù)灰度直方圖的分布情況,本文采用Otsu法對圖像進(jìn)行分割處理[9],該方法分割效果好,計算簡單。在對圖像進(jìn)行分割的過程中,動態(tài)地確定閾值T,使得在圖像分割之后,目標(biāo)圖像與背景之間的方差最大,閾值分割效果如圖6所示。

圖5 中值濾波后的圖像灰度直方圖
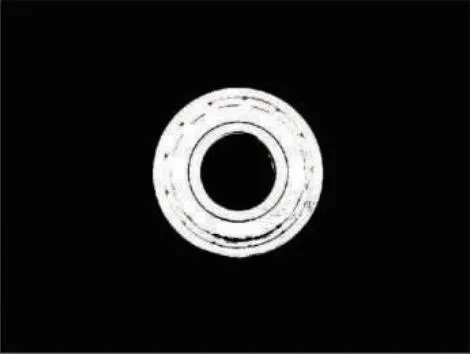
圖6 Otsu閾值分割
4)圖像外輪廓邊緣檢測
圖像的邊緣特征包含了圖像的大部分信息,是對圖像進(jìn)行識別定位的關(guān)鍵因素。在邊緣檢測的算法中Canny邊緣檢測受到噪聲的影響較小,檢測出來的邊緣比較連續(xù),邊緣線條清晰,檢測精度高并且受圖像噪聲的干擾較小,在對圖像進(jìn)行邊緣的檢測中得到了廣泛的應(yīng)用。所以本文結(jié)合此方法對軸承圖像進(jìn)行邊緣檢測。同時通過對軸承圖像的外輪廓邊緣特征進(jìn)行識別匹配定位就可以達(dá)到對目標(biāo)軸承進(jìn)行識別定位的目的,還可以簡化圖像處理的信息,提高計算速度。為提取到目標(biāo)圖像的外輪廓邊緣特征,本文對閾值分割后的圖像先進(jìn)行孔洞填充處理,再對圖像進(jìn)行Canny邊緣檢測,效果如圖7所示。

圖7 外輪廓邊緣特征檢測
2.2 軸承的Hu不變矩特征識別匹配
在提取到目標(biāo)圖像外輪廓邊緣特征后,本文采用圖像的Hu不變矩特征來對目標(biāo)軸承進(jìn)行識別匹配。通過設(shè)置軸承的模板圖像,計算模板圖像與待識別軸承圖像外輪廓的Hu不變矩特征值并進(jìn)行比較計算,同時設(shè)定相應(yīng)的檢測閾值,以達(dá)到對目標(biāo)軸承進(jìn)行識別判斷的目的。
1)Hu不變矩
圖像的Hu不變矩特征具有在圖像發(fā)生平移、縮放以及旋轉(zhuǎn)的時候都不變的性質(zhì)[10],其分析計算過程如下。
a)計算圖像的(p+q)階幾何矩mpq和中心矩μpq:
(1)
式中N、M分別為圖像的行列數(shù)。
b)對中心距μpq做歸一化計算:
(2)
式中μ00是零階中心距。
c)構(gòu)造胡氏7個不變量
(3)
上述的7個特征量變化較大,并且可能出現(xiàn)負(fù)值。因此,本文采用式(4)對上式得出的結(jié)果再進(jìn)行計算。
φi=sign(φi)log|φi,i=1,2,…,7
(4)
2)工件的識別匹配
對待識別的軸承進(jìn)行識別匹配的過程中,首先需建立軸承的模板圖像A并獲取到該圖像外輪廓的Hu不變矩特征值;然后對待識別的軸承圖像B進(jìn)行處理,提取圖像的外輪廓邊緣特征,同樣也計算出該輪廓的Hu不變矩特征值;最后對兩組特征值通過式(4)進(jìn)行計算并利用式(5)進(jìn)行計算比較,同時設(shè)定相應(yīng)的檢測閾值完成工件的識別匹配判斷。
(5)

由式(5)可知:當(dāng)I(A,B)越小時,待識別的軸承圖像與模板軸承的匹配度越高,反之則越低。
2.3 軸承工件的定位
傳統(tǒng)的定位軸承工件圓心的位置有Hough變換[11]、三點定圓法[12]以及最小二乘法[13]。Hough變換具有魯棒性好,但在其投票統(tǒng)計的累加過程中需要消耗大量的內(nèi)存和時間;三點定圓法雖然計算簡單,但其定位精度也較低;最小二乘法可以得到高精度的圓心位置,同時計算量少,占用的內(nèi)存和消耗的時間均較少,但容易受到圖像中干擾點的影響,降低最后的定位精度。基于此,本文提出在完成目標(biāo)軸承的識別匹配之后,對提取到的圖像外輪廓上的邊緣點集Q采用最小二乘法進(jìn)行圓的擬合,然后利用迭代法進(jìn)行修正,最后通過計算圓心的位置坐標(biāo)實現(xiàn)對目標(biāo)軸承工件的位置定位,達(dá)到提高軸承工件的定位精度以及檢測系統(tǒng)的檢測效率的目的。
圓曲線方程的一般形式可以描述為
R2=x2-2Ax+A2+y2-2By+B2
(6)
令a=-2A,b=-2B,c=A2+B2-R2,則可將式(6)轉(zhuǎn)換為
x2+y2+ax+by+c=0
(7)
設(shè)di為邊緣上的點ai(Xi,Yi)到圓心的距離,則有:
(8)

(9)
通過Q(a,b,c)分別對a、b和c求偏導(dǎo)并取偏導(dǎo)數(shù)為0,則可以計算出:
(10)

由此即可計算出擬合圓的圓心坐標(biāo)O0(Xc,Yc)以及圓半徑R0的大小。但是在實際的應(yīng)用中發(fā)現(xiàn),該算法有時候得出的結(jié)果與真實的結(jié)果存在較大的偏差。這是因為在進(jìn)行圓擬合的過程之中受到某些方向上干擾點的影響,導(dǎo)致最終得出的結(jié)果出現(xiàn)了偏差。所以為了使計算出的結(jié)果更接近于真實值,本文采用迭代法對上述得出的結(jié)果進(jìn)行迭代修正處理。設(shè)迭代函數(shù)為
(11)
式中參數(shù)p的作用在于當(dāng)干擾點接近擬合圓時,放大誤差值,使得f取到全局最小值。

ξ(k+1)=ξ(k)-ΦFξ(k);F=[F1F2F3]T
(12)

在迭代計算的過程中取圓心坐標(biāo)O0(Xc,Yc)和半徑R0作為ξ(k)的初始值ξ(0)。同時結(jié)合迭代終止式(13),設(shè)置相應(yīng)的初始步長以及迭代精度得出最終的圓心坐標(biāo)和半徑值。
(13)
式中tol為迭代的相對誤差。
3 實驗驗證與結(jié)果分析
本文結(jié)合實驗室現(xiàn)有的AUBO機(jī)器人、海康MV-CE050-31GM相機(jī)、MVL-HF1228M-6MPE鏡頭等設(shè)備,基于Visual Studio 2017平臺、OpenCV3.4.6視覺函數(shù)庫進(jìn)行開發(fā)與實驗驗證分析。其中MV-CE050-31GM相機(jī)的傳感器類型為CMOS,分辨率為2 592×1 944,通信接口為GigE;MVL-HF1228M-6MPE鏡頭具有畫面清晰度高以及對比度好等特點。將相機(jī)安裝在AUBO機(jī)器人的執(zhí)行末端,用于采集軸承圖像,采用環(huán)形光源進(jìn)行補(bǔ)光以使軸承圖像更加清晰,以PC作為上位機(jī),通過GigE接口接收相機(jī)發(fā)送過來的圖像信息,實驗環(huán)境如圖8所示。

圖8 實驗環(huán)境
實驗的過程之中將NSK 6204Z軸承擺放在試驗臺上并在每一次實驗之前在一定范圍內(nèi)改變其在實驗臺上的位置,然后設(shè)置軸承的模板圖像與檢測閾值,利用本文的算法對待檢測的軸承進(jìn)行匹配識別,設(shè)置當(dāng)檢測得到的匹配度閾值小于0.05時,則認(rèn)為該工件為目標(biāo)軸承工件。同時利用本文的定位算法計算出軸承的位置坐標(biāo)(xi,yi),將此結(jié)果與真實值(x0,y0)做比較,計算在x軸方向和y軸方向的偏差值Δx和Δy。
(14)
共進(jìn)行了50次的實驗,實驗結(jié)果如表1(部分結(jié)果)和圖9—圖11所示。
由圖9可知軸承匹配度的范圍在0~0.03之間,皆小于設(shè)定的匹配度閾值0.05,50次軸承的識別匹配正確率為100%;圖10中在x軸方向和y軸方向上的位置誤差撥動范圍的絕對值都在0.5像素以內(nèi);圖11中每次實驗所用的時間都在[210,230]ms之間,識別定位誤差皆滿足系統(tǒng)對軸承的識別定位精度要求。由此可知在誤差范圍之內(nèi),本文算法可實現(xiàn)對目標(biāo)軸承的準(zhǔn)確識別與定位。

圖10 定位誤差曲線

圖11 耗時曲線
4 結(jié)語
針對在結(jié)合視覺技術(shù)對軸承進(jìn)行質(zhì)量檢測以及尺寸測量的過程之中,待檢測的軸承易發(fā)生位置的偏移導(dǎo)致測量的結(jié)果出現(xiàn)較大的偏差,所以在對軸承進(jìn)行各項參數(shù)檢測之前需對目標(biāo)軸承進(jìn)行準(zhǔn)確的識別定位。基于此,本文提出了一種基于機(jī)器視覺的軸承識別與定位算法,通過對采集到的圖像進(jìn)行預(yù)處理,分割出目標(biāo)圖像并提取圖像的外輪廓邊緣特征,然后結(jié)合計算待識別圖像和模板圖像的Hu不變矩特征值對圖像進(jìn)行識別匹配;最后通過最小二乘法擬合圓計算圖像的位置信息,并通過迭代法進(jìn)行修正。實驗結(jié)果表明:本文針對軸承的識別與定位提出的算法滿足系統(tǒng)對軸承的識別定位精度要求;可應(yīng)用于軸承的生產(chǎn)線上;對提高對軸承各項參數(shù)的質(zhì)量檢測精度,具有實際意義。
猜你喜歡
數(shù)學(xué)小靈通·3-4年級(2024年2期)2024-05-15 02:02:28
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年12期)2021-01-18 06:57:46
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年12期)2021-01-18 06:57:46
世界科學(xué)技術(shù)-中醫(yī)藥現(xiàn)代化(2020年2期)2020-07-25 02:05:36
瘋狂英語·新策略(2019年10期)2019-12-13 08:43:28
當(dāng)代陜西(2019年10期)2019-06-03 10:12:04
數(shù)學(xué)小靈通·3-4年級(2017年9期)2017-10-13 08:10:54