廣州地鐵車輛巡檢機器人導航技術運用研究
2024-02-20 05:46:44趙仁龍
鐵道運營技術 2024年1期
關鍵詞:環境
趙仁龍
(廣州地鐵集團有限公司 運營事業總部,工程師,廣東 廣州 510000)
0 引言
地鐵車輛檢修長期以人工檢修為主,隨著地鐵運營里程的增加,車輛檢修需求逐漸增高,人工檢修作業周期頻繁、工作量大、工作環境差,且多為夜間檢修作業。人工檢修采用傳統的人工目視等檢修方法,這種檢修效率、安全性和可靠性等方面均存在不足。因此需要對智能化檢修進行研究,以廣州地鐵九號線地鐵巡檢機器人為例,結合機器人調試與應用,對其導航技術做了研究,考慮引用機器人檢測系統輔助地鐵車輛運營,研究自動化檢測系統,對提升檢修效果,實現智能化、信息化、立體化檢修具有一定意義。
1 常用的機器人導航技術對比研究
機器人檢測系統需與地鐵檢修庫內情況適配,地鐵檢修庫存在以下幾點問題:首先,地鐵檢修庫內地形較為復雜,存在上下坡,地溝,支撐柱等多種影響機器人順利移動的地形或障礙,機器人需要有較高的定位準確性,準確的得知障礙信息從而避障。其次,國內各地地鐵的發展時間、水平和環境有所不同;不同城市和不同線路的車輛段檢修庫也會存在地溝寬度,地溝平整度和庫內障礙的區別,機器人檢測系統需有較高的環境適應性,從而減少為適配機器人檢測系統而進行的庫內改造。再次,機器人用于車輛的日常例行檢查,使用頻率較高,機器人檢測系統需要有較高的使用穩定性,減少對系統的日常維護。最后,對于逐漸增加的運營里程和車輛配置數量,機器人數量也會逐漸增加,檢測系統需要有較低的應用價格,從而增加機器人推廣的可行性。
綜上所述,適應庫內的機器人檢測系統需要有較高的定位準確性、環境適應性、使用穩定性和較低的應用價格。以這些特點為基準,分析了三種常用的工業機器人導航技術:循跡導航技術,二維碼AGV(自動引導車Automated Guided Vehicle,AGV)導航技術和SLAM激光雷達導航技術,分析出基于SLAM導航的智能巡檢機器人適合地鐵檢修需求。
1.1 循跡導航技術
循跡導航技術屬于自動引導技術范疇。這種導航技術類似于軌道移動,被導航的機器人會隨著預先鋪設好的軌道或路徑進行行動,具有運行穩定性較高,維護工作量較少的優點。最常見的應用案例像博物館的導航機器人,因為該機器人只需在固定的展覽位置進行移動,穩定性較高;并且機器人只需在固定位置對展覽內容進行報告,工作量較少。
這種導航技術擁有較高適應性、穩定性和低價格的特點,但當機器人的行走路線需修改時必須重新鋪設磁條,修改機器人導航路線工作量大、存在較大弊端,不適用機器人的精準、多變的檢修特性需求。
1.2 二維碼AGV導航技術
二維碼技術原理是將數據存儲在二維碼標簽中,通過提取獲得定位和軌跡的一種技術[1]。包括五種導航方式,磁帶導航、電磁導航、激光導航、視覺導航和慣性導航[2],但在地鐵檢修機器人應用中均存在不足。
磁帶導航和電磁導航具有簡單可靠、制造成本低和實現難度小等優點,但AGV運行路線一旦確定便難以修改,且導航路線容易受到周圍金屬物的干擾,因此局限性較大[3]。
激光導航通過激光反射板反射回的激光計算AGV的方向和實時位置,這種方法容易受環境中遮擋物于擾[4]。
視覺導航靈活性較高、應用范圍廣、成本低。但目前技術成熟度不高,利用視覺系統準確地實現路標識別這一技術仍處于技術攻關階段[5]。
慣性導航利用積分計算AGV當前的位置和狀態,以此確定自身運行航向。這種系統由于其自身傳感器存在累計誤差導致導航精度隨運行時間下降[6]。
1.3 SLAM激光雷達導航技術
SLAM導航的全稱為定位與地圖建模導航技術(Simultaneous Localization and Mapping),該技術主要是利用激光或圖像的技術,通過激光或圖像掃描拍攝周圍的環境來確定自己的位置,機器人不斷在運動中觀測環境,從而逐漸建立起運動環境中的地圖,同時在運行中實時計算,計算出在每一個時刻機器人自身在這張地圖中位置的過程。
SLAM激光雷達導航技術最重要的特點是導航技術的穩定性,機器人探測環境所用的各種傳感器,地圖構建的定位,都會存在誤差。因此對于復雜的環境,不同的場景使用不同的傳感器,需要做大量的實驗來考證,尋求跟環境更適合的傳感器來接受數據,選擇合適的概率方法來提高準確性,而激光雷達可以提供高精度的環境信息。
國內SLAM研究雖然起步較晚,但發展迅速,不斷優化,使其能在更復雜的環境內使用,SLAM技術具有較好的穩定性和適應性,理論上滿足地鐵車輛運維的需求,具體還應結合算法進行分析。
2 基于SLAM導航的智能巡檢機器人
構架好環境地圖,控制機器人進行導航實驗。如圖1中為基于SLAM導航的巡檢機器人,它是一個由運動平臺、六(前后左右上下)自由度柔性機械臂、圖像采集模塊、機器人控制單元、安全保護單元、機器人自動定位單元組成,實現機器人在車輛檢修庫內的定位、運動、圖像采集、安全防護等功能。
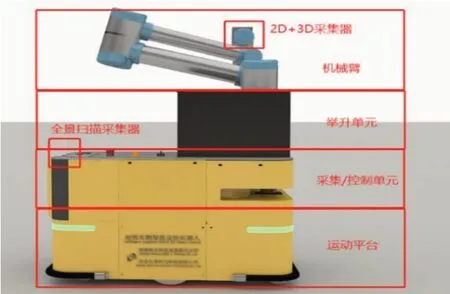
圖1 基于SLAM導航的巡檢機器人
2.1 SLAM導航技術檢測原理
機器人檢測系統采用基于卡爾曼濾波算法的多傳感器融合SLAM 定位技術,該定位方法可以簡單描述為:機器人攜帶感知環境位置信息的各種傳感器(激光雷達、編碼器、測距傳感器),從未知環境的初始坐標點出發,通過傳感器對機器人的位置信息進行實時定位,從而用該位置信息進行地圖的整體構建,利用地圖信息獲取機器人的確切坐標。如圖2 所示為SLAM 算法實現過程,包括了“預測”→“測量”→“修正”的導航計算過程。
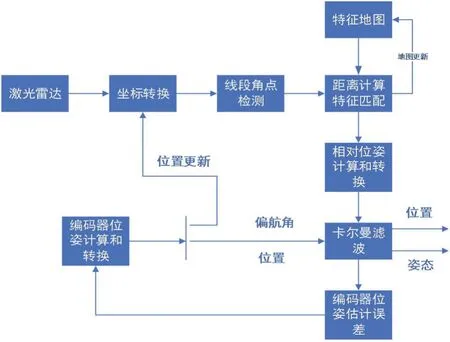
圖2 SLAM算法實現過程
2.2 機器人在地鐵車輛檢修的應用
根據SLAM導航技術“預測”→“測量”→“修正”的過程原理,記錄巡檢機器人在廣州地鐵九號線車輛段運用庫內預測,測量和修正的數值,從而判斷SLAM 導航技術是否滿足地鐵行業的需求:具有較高的定位準確性,較高的環境適應性,較高使用穩定性和較低的應用價格。通過MATLAB 進行仿真分析,建立了具有障礙物的地圖(如圖3所示),用于測試SLAM導航技術的環境適應能力。在地圖上可以確認機器人初步定位預測,機器人傳感器定位位置和兩者修正數值,之后對機器人實際位置進行測量,從而測試SLAM導航技術的定位準確性。
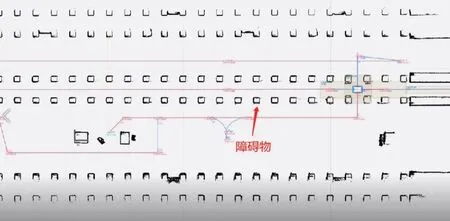
圖3 具有障礙物的地圖
2.2.1 環境適應性 機器人通過SLAM導航技術的特征、自身攜帶的傳感器和構建的地圖信息,從而準確的獲得精確定位。自身攜帶的激光傳感器用于判斷機器人周圍近距離內是否存在影響移動的障礙物,從而避免和障礙物發生相撞。根據實際運用情況,2020 年1 月1 日-2020 年12 月31 日,基于SLAM 導航技術的機器人在使用過程中,無機器人與障礙物相撞的情況,機器人可以適應地鐵車輛段地溝的條件(如圖4所示)。
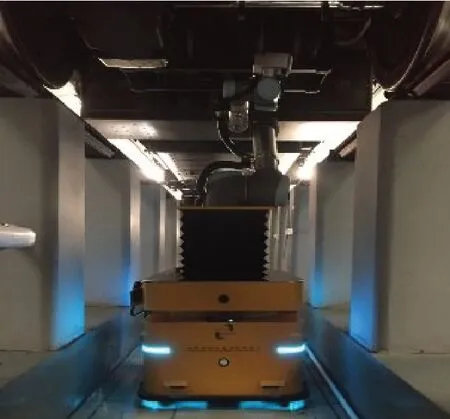
圖4 機器人在地溝運用照片
地鐵庫內車輛檢修一般為一列車占用一條股道,檢修要求庫內的每條地溝均會停靠不同車輛,以滿足多輛列車的同時檢修需求。傳統的機器人導航技術通常情況下只能進行單獨到車輛檢修作業,造成機器人自動檢修作業的運用較難實現普及。廣州地鐵九號線檢修機器人依賴準確的導航技術,設計了股道轉運裝置,實現了在股道之間自動切換,從而達到單臺機器人覆蓋多條檢修地溝。
2.2.2 定位準確性 為了驗證SLAM技術的準確性,在車輛段的地溝內進行試驗,通過控制機器人行走,保證運行情況一致的前提下,進行多次坐標位置的記錄。對機器人初步定位預測,機器人傳感器定位位置,兩者修正數值和實際位置量進行記錄。根據每次位置記錄可以得知,隨著機器人在地溝的移動距離增加,機器人的定位預測和機器人的傳感器定位差距在不斷增加,這個時候SLAM 技術的數據修正功能會起到作用,修正數值大概在0~0.5 米。在SLAM 技術的傳感器和修正功能共同工作下,修正后的機器人導航位置和實際位置非常接近,在120米的實驗距離內,實際與理論差值<0.1 米(如圖5所示),這可以證明SLAM導航技術機器人在地鐵車輛地溝內,具有較高的定位準確性。
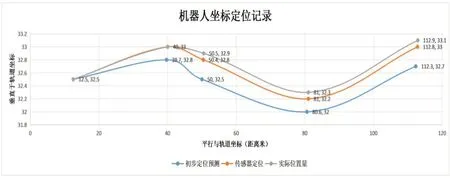
圖5 機器人位置記錄
2.2.3 設備穩定性 為測試SLAM導航技術機器人的設備穩定性,進行了機器人運動疲勞測試。通過地面設置長度50m 測試通道,在通道兩端分別安裝計數器探頭,用來記錄機器人往復運動次數,以此計算機器人累計連續行駛里程。控制機器人在通道兩端之間持續往復運動,直到電池電量耗盡,然后通過更換電池方式快速恢復運行。通過記錄機器人累計行駛里程來評價機器人的運行穩定性,連續累計行駛里程應不低于150km。實驗測試運行速度約為1.2m/s,至本次測試結束時,連續累計行駛里程162.1km。以上實驗(如圖6 中測院實驗報告)可以證明基于SLAM導航技術的機器人在地鐵智能運營中有較高的穩定性。
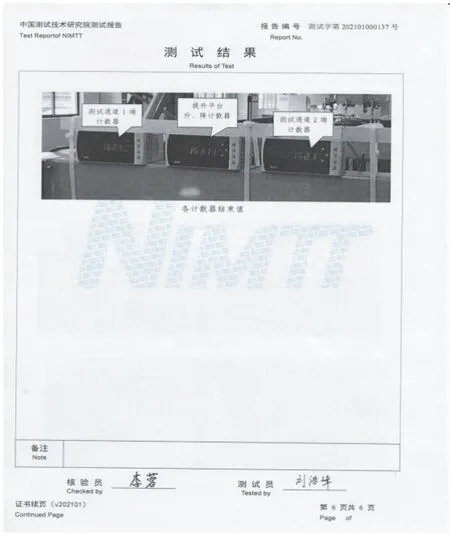
圖6 中測院實驗報告
3 實際運用
采用SLAM導航技術的車輛檢修機器人在列車檢修運用,設置1個地面控制站,1套無線網絡系統,充電樁。車輛檢修機器人減少了人工檢修工作量,實現對既有車輛修程優化,運用庫由傳統的雙日檢延長至八日檢。機器人對每日的回庫車進行全部的車底檢查作業,僅安排人工進行每8 天進行一次列車全方位檢查,具體流程如圖7 所示。這種人機結合的方式,實現了地鐵車輛檢修體制的優化,提高了車輛檢修質量及效率。
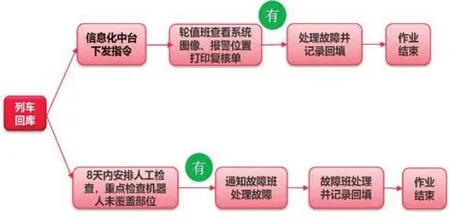
圖7 人機結合的作業流程
經過現場的實際統計,2020年度總共累計完成檢測模擬車輛574 列,共檢測模擬故障8130 個。系統整體的缺陷檢出率從最開始的61.35%提高到98.39%,系統誤報率從6.57%下降到0.02%。
4 結束語
本文通過對幾種常見導航技術的分析研究,結合車輛巡檢機器人在實際地鐵車輛檢修中的應用表現,得出了SLAM導航技術具有較高的定位準確性,較高的環境適應性,較高使用穩定性,較低的應用價格,從而提出了SLAM 導航技術較為適合在地鐵車輛巡檢機器人的檢修需求。這項技術在安全性、人工成本、時間成本、風險成本、管理成本等方面的表現也適應于軌道交通車輛的檢修需求,對于保障城市軌道交通車輛的安全、準點運營具有較高的應用價值。
猜你喜歡
中老年保健(2021年12期)2021-08-24 03:30:40
中國傳媒大學學報(自然科學版)(2021年1期)2021-06-09 08:43:00
中國生殖健康(2020年6期)2020-02-01 06:28:50
新世紀智能(英語備考)(2019年12期)2020-01-13 06:07:18
中國生殖健康(2019年11期)2019-01-07 01:28:02
中國生殖健康(2018年6期)2018-11-06 07:09:28