融合北斗定位技術的長大隧道群工程線安全管控系統設計與實現
2024-02-10 11:49:10胡鵬
鐵路計算機應用 2024年1期
關鍵詞:作業
胡 鵬
(成昆鐵路有限責任公司 工程管理部,成都 610031)
長大隧道群工程線施工存在諸多安全風險,主要包括:施工環境較為復雜、照明和通信不暢、客觀環境惡劣;涉及多家施工單位,點多線長,作業地點分散,交叉施工頻繁;一旦發生安全事故,救援難以順利開展[1-2]。因此,工程線施工安全管理一直是建設管理的痛點。
針對上述問題,大量研究人員對其進行了研究,秦健[3]利用北斗衛星導航系統(簡稱:北斗)高精度定位技術,結合地理信息系統、地基增強、移動通信及其他輔助技術,研發了基于北斗的鐵路施工作業人員和車輛安全預警防護系統,實現了現有鐵路施工作業過程中人員與車輛間存在安全隱患時的成功預警;關達等人[4]分析鐵路營業線施工現場安全防護管理需求,提出安全管控策略和卡控流程,利用北斗地基增強高精度定位和移動應用等新技術,研發了智能安全防護設備,設計開發了鐵路營業線施工智能安全防護管理系統,實現對施工現場關鍵人員、智能防護設備、路用車施工作業全流程管理。但上述研究均未解決長大隧道群中信息覆蓋和工程線安全管控的問題。
本文以山區鐵路長大隧道群工程安全管控為研究對象,融合北斗定位技術,設計長大隧道群工程線安全管控系統,實現對動力車輛及人員的實時定位、動力車輛接近預警,以及與工程調度中心進行遠程實時通信等功能,顯著提升長大隧道群工程線施工安全管理水平。
1 系統總體架構
融合北斗定位技術的長大隧道群工程線安全管控系統(簡稱:本文系統)分為感知層、傳輸層、數據層、應用層和表現層5 個層級,其總體架構如圖1 所示。
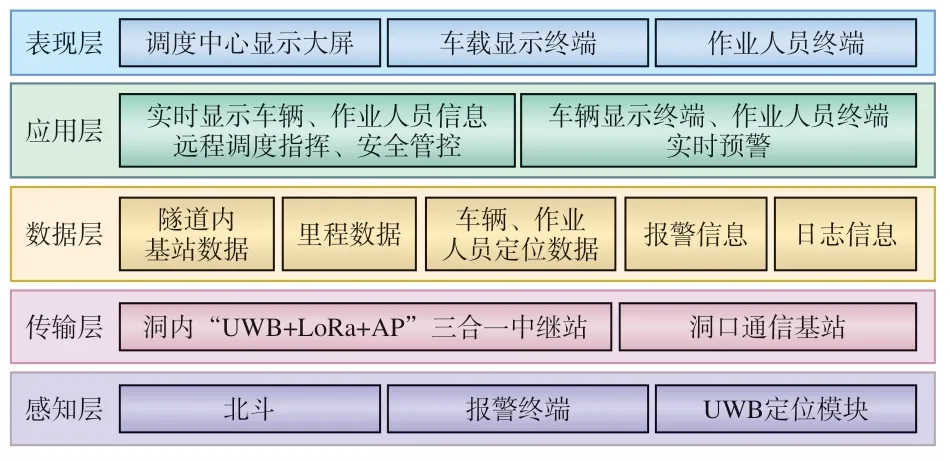
圖1 長大隧道群工程線安全管控系統總體架構
1.1 感知層
感知層通過北斗、超寬帶通信(UWB,Ultra Wide Band)定位模塊[5-6]及作業人員報警終端,實時獲取動力車輛位置、速度及作業人員位置信息等,并經基站回傳至隧道洞口的通信基站的邊緣計算處理終端進行數據處理和分析。
1.2 傳輸層
傳輸層采用融合北斗定位技術的隧道內、外組合通信組網。根據隧道長度,在隧道內設置由“UWB+遠距離無線電(LoRa,Long Range Radio)[7-8]+無線訪問接入點(AP,Access Point)”三合一的集成中繼站,隧道洞口設置可進行邊緣計算的通信基站,兩者共同實現了隧道內外的通信組網,為本文系統各類數據提供安全高效的傳輸通道。
1.3 數據層
數據層包括隧道內安裝的基站基礎數據,解析后的里程數據,動力車輛和作業人員的定位數據,以及相應的報警信息、日志信息等交互數據。
1.4 應用層
應用層實現了隧道內外的動力車輛和作業人員的實時定位及預警,加強了施工現場的安全防護;調度中心通過現場反饋的動力車輛、作業人員信息,進行遠程調度指揮和安全管控,進一步保障了施工安全。
1.5 表現層
表現層通過調度中心大屏實時滾動顯示全線的動力車輛信息和分布情況、各標段作業人員信息,以及最新的預警信息等,方便調度中心的管理人員進行整體管控;現場車載顯示終端和作業人員終端也能接收和顯示預警信息,并進行聲光預警等。
2 系統功能
本文系統功能如圖2 所示。
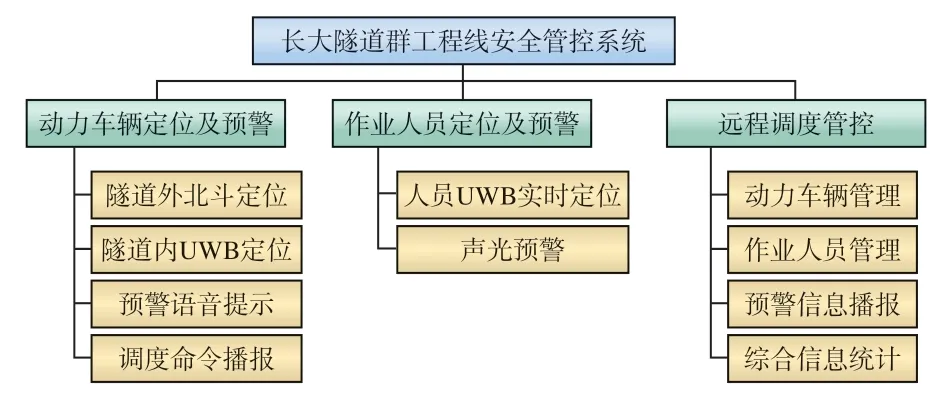
圖2 長大隧道群工程線安全管控系統功能
2.1 動力車輛定位及預警
動力車輛定位及預警功能包括隧道外定位、隧道內UWB 定位、預警語音提示和調度命令播報等。動力車輛在隧道外運行時,采用北斗定位技術,當其進入隧道后自動切換成UWB 定位模式,同時駕駛員通過預警語音提示和調度命令播報等功能及時采取防范措施。
2.2 作業人員定位及預警
作業人員定位及預警功能包括作業人員UWB 定位和聲光預警。作業人員的實時定位反映現場作業人員安全防護情況,聲光預警可及時提醒作業人員下道避車,保障其安全。
2.3 遠程調度管控
遠程調度管控功能包括動力車輛管理、作業人員管理、預警信息播報和綜合信息統計等。調度中心管理人員可實時掌握全線的動力車輛運行和分布情況、各標段作業人員情況、最新預警播報等信息,便于及時研判風險,調整行車和作業計劃,從源頭保障施工安全。
3 關鍵技術
3.1 融合北斗定位的隧道內外組合通信組網
3.1.1 隧道洞內組合通信組網
隧道洞內采用了“UWB+LoRa+AP”三合一的集成組網方式。隧道洞內的網絡覆蓋情況如圖3 所示,UWB 對覆蓋范圍內的定位卡進行測距,由點對點AP 將信息傳輸至洞口基站進行邊緣計算,借助LoRa 低功耗遠距離無線傳播數據技術優勢,廣播預警信號、車輛運行里程和速度信息等。

圖3 隧道洞內組合通信組網示意
根據信號覆蓋范圍,隧道內每間隔1 km~1.5 km安裝一個“UWB+LoRa+AP”三合一集成中繼站,從而在隧道內部建立連續穩定的測量定位和調度廣播通信網絡。
3.1.2 隧道洞口通信組網
隧道洞口通信組網如圖4 所示,在隧道洞口設置北斗+移動網絡通信基站(一般安裝在距離隧道口外100 m 以內的位置)作為該隧道內的基準定位點,向洞內中繼站轉發預警信息,同時作為邊緣計算的終端對隧道內的車輛和人員進行定位解析。本文系統利用北斗覆蓋范圍廣和無通信盲區的優勢,在山區條件下,采取北斗短報文作為移動網絡的強有力補充,有效解決長大隧道群工程線的信息傳輸問題[9]。
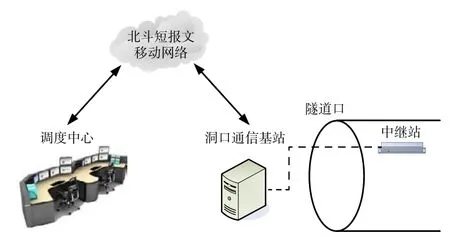
圖4 隧道洞口通信組網示意
3.2 隧道內外動力車輛、作業人員實時定位
3.2.1 隧道外實時定位
工程線采用的是里程坐標,本文系統對全線隧道外的經緯度均提前進行了采集,并與里程坐標形成一一對應的映射關系,存入數據庫服務器,以便后續調取[10]。工程線上每臺動力車輛均加裝了北斗導航的接收機,隧道外動力車輛實時定位方式如圖5 所示。隧道外動力車輛采用北斗的定位數據,直接接收衛星信號,解析為經緯度坐標,再基于經緯度坐標和里程坐標的映射關系,轉化為里程坐標,傳回調度中心,同步發回車載顯示終端,從而實現實時定位。

圖5 隧道外動力車輛實時定位示意
3.2.2 隧道內實時定位
隧道內作業人員和動力車輛定位采用洞口基準定位點結合UWB 測距的技術,由車載定位標簽、作業人員佩戴的有定位標簽的報警終端和中繼站共同實現。
當動力車輛進入隧道后,從隧道內中繼站讀取到車載UWB 定位標簽的數據開始,自動切換到UWB 定位模式。通過中繼站與動力車輛、作業人員定位標簽的UWB 通信信道傳輸時間測距和定位,通過中繼站AP 匯集定位數據并傳輸至洞口通信基站,進行邊緣計算,解析出動力車輛、作業人員在隧道內的精準里程坐標。具體方法如圖6 所示。
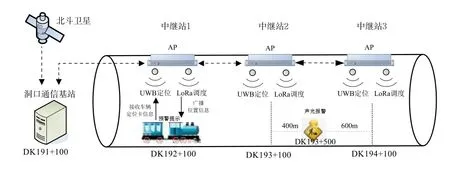
圖6 隧道內機車和作業人員實時定位
圖6 中,中繼站2(DK193+100)和中繼站3(DK194+100)的安裝里程位置是固定的,2 個中繼站分別對作業人員佩戴的定位報警終端進行測距,其中,中繼站2 讀卡距離400 m,中繼站3 的讀卡距離為600 m,則可以確定作業人員位于中繼站2 和3之間,其定位里程為DK193+500。
3.2.3 動力車輛左右線判別
由于北斗定位和UWB 定位都無法判斷動力車輛所處位置是左線還是右線,為精確確定動力車輛行駛位置,參考應答器的原理,本文采用無線射頻(RFID,Radio Frequency Identification)標簽預埋的方式,解決了機車運行左右線的自動判識。
如圖7 所示,在動力車輛可能切換線路的道岔區段附近預埋RFID 標簽。其中,左線預埋奇數卡號標簽,右線預埋偶數卡號標簽。在每輛動力車輛底部安裝RFID 讀卡器,動力車輛在行駛經過預埋標簽的位置時,通過讀卡即可判定行駛的路線,并為后續精確預警奠定基礎。
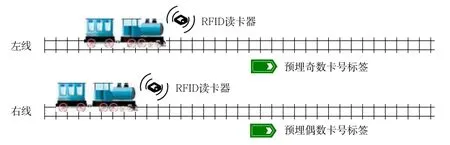
圖7 動力車輛左右線自動判別示意
3.3 隧道內動力車輛接近預警
工程線施工過程中,本文系統通過北斗定位及隧道內的UWB 實時定位將作業人員、動力車輛的實時動態數據通過中繼站傳輸至洞口通信基站,通信基站根據采集的數據,實時計算出兩者間的間距,若間距小于預警提示閾值2 km[10],則發送預警信息。通過北斗短報文將預警指令信息發送至調度中心,同時,洞內中繼站將預警指令信息傳輸至動力車輛與作業人員所在位置關聯的LoRa 基站。LoRa 基站下發警示指令到車載顯示終端和作業人員終端,車載顯示終端和作業人員終端觸發繼電器開關進行聲光預警。使兩者都采取相應的防護措施,從而避免人員傷亡事故發生,確保動力車輛和施工人員安全。動力車輛接近預警過程如圖8 所示。
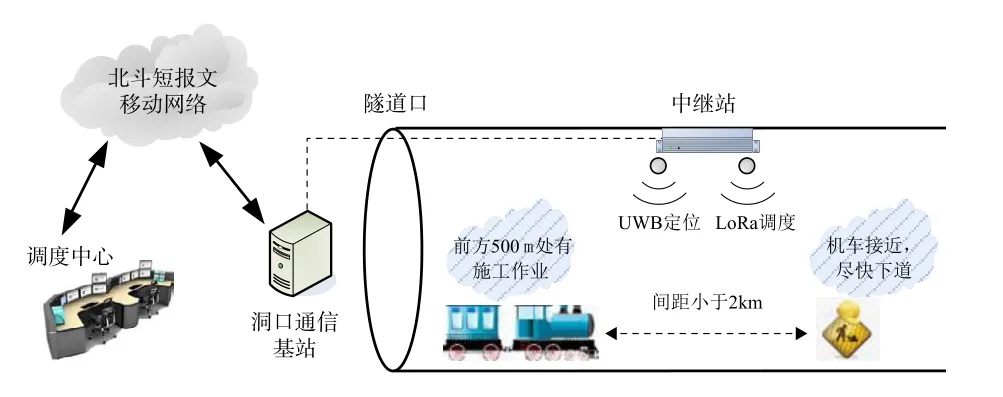
圖8 隧道內動力車輛與作業人員接近預警示意
4 系統應用實例
成昆(成都—昆明)鐵路峨眉—冕寧段地處西南山區,正線全長226 km。全線共有27 座隧道,長約170 km,其中,超過6 km 長的隧道有11 座,屬典型的長大隧道群工程[11]。
本文系統于2023 年3 月起在成昆鐵路峨眉—冕寧段上線運行,該系統投用以來,為增強其工程線安全管理發揮了重要作用,及時發送多次預警,有效避免了動力車輛與現場作業人員間碰撞事故的發生。
下面主要介紹一下本文系統遠程調度管控功能的應用。
4.1 動力車輛管理
該功能集中展示了注冊和上道的動力車輛信息,可直觀看出動力車輛所屬單位、車牌號、當前所在里程和線別等信息。鑒于該區段工程線施工過程中配合單位眾多,為便于相互間的協調配合,里程展示精確到所在標段、具體隧道或橋梁的信息,方便調度中心進行風險研判。
4.2 作業人員管理
為方便各個標段管理,作業人員攜帶的作業人員終端根據站前站后不同專業的使用工況,分別匹配綁定小平車、梯車、施工臺架等。根據現場作業地點和工況的不同,作業人員相關的標識信息包含了具體單位、編號、當前里程、速度和施工計劃。
4.3 預警信息播報
調度中心實時掌握各類報警信息,并進行實時播報,在調度中心顯示大屏上顯示預警時間、類型和詳細內容,為各標段的管理人員實時了解現場情況提供了直觀便捷的渠道。
4.4 綜合信息統計
與地理信息圖層相結合,該功能可在調度中心顯示大屏上實時顯示全線動力車輛信息和分布情況、各標段作業人員情況和終端上線情況及預警信息統計等。
5 結束語
融合北斗定位技術的長大隧道群工程線安全管控系統通過融合北斗定位技術和“UWB+LoRa+AP”三合一的綜合組網技術進行隧道內外的通信組網,實現了動力車輛及作業人員的實時定位和動力車輛接近預警等功能,有效避免生產安全事故的發生;調度中心能夠實時掌握現場動力車輛、作業人員的綜合信息,便于及時研判生產安全風險,調整運輸組織和作業計劃,進一步保障施工安全。
本文系統在成昆鐵路峨眉—冕寧段試用后,其工程線安全情況總體可控,未出現安全事故,同時,為后續長大隧道群內工程線施工安全管控積累了寶貴經驗。
猜你喜歡
小主人報(2022年1期)2022-08-10 08:28:44
新作文·小學低年級版(2021年9期)2021-11-27 07:57:46
學生天地(2020年17期)2020-08-25 09:28:54
作文成功之路·小學版(2020年7期)2020-08-24 08:19:30
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
作文成功之路·小學版(2020年7期)2020-01-02 10:10:44
趣味(數學)(2018年12期)2018-12-29 11:24:10
小學生作文(中高年級適用)(2017年10期)2017-11-13 06:01:00
能源(2016年2期)2016-12-01 05:10:46
故事大王(2016年7期)2016-09-22 17:30:08