一種基于多目機(jī)器視覺技術(shù)的硅片搬運(yùn)機(jī)構(gòu)研究
2024-02-10 09:59:18鄧樂,樊坤
太陽能 2024年1期
鄧 樂,樊 坤
(1. 長沙長泰機(jī)器人有限公司,長沙 410000;2. 中國電子科技集團(tuán)公司第四十八研究所,長沙 410000)
0 引言
在太陽電池整個(gè)生產(chǎn)過程中,無論是采用發(fā)射極和背面鈍化(PERC)工藝路線、隧穿氧化層鈍化接觸(TOPCon)工藝路線,還是采用異質(zhì)結(jié)(HJT)工藝路線等,都需要經(jīng)歷多次的硅片上/下料。以采用HJT 工藝路線制備太陽電池為例,在其化學(xué)氣相沉積(CVD)工藝制程中,硅片所覆膜層的厚度一般為5~10 nm,因此CVD 工藝制程后硅片的i 層、i/n 層、p 層都是極其脆弱的薄膜層。經(jīng)過生產(chǎn)驗(yàn)證,CVD 工藝制程完成后,需在氮?dú)夥諊拢?0 min 內(nèi)對硅片進(jìn)行物理氣相沉積(PVD)工藝制程,否則其表面易部分氧化生成二氧化硅,導(dǎo)致太陽電池的光電轉(zhuǎn)換效率降低。因此,無論采用何種工藝路線,太陽電池的制備對生產(chǎn)環(huán)境及硅片搬運(yùn)機(jī)構(gòu)生產(chǎn)效率的要求很高。
硅片搬運(yùn)機(jī)構(gòu)上的托盤是進(jìn)行CVD 和PVD工藝制程時(shí)常用的載具。為了保證硅片在CVD或PVD 工藝制程時(shí)保持位置固定,托盤上通常設(shè)有貼合硅片外形的沉臺(tái)開口,因此硅片被硅片搬運(yùn)機(jī)構(gòu)搬運(yùn)進(jìn)沉臺(tái)開口前需要進(jìn)行精確定位。若硅片搬運(yùn)進(jìn)托盤沉臺(tái)開口時(shí),硅片邊緣搭接在沉臺(tái)開口邊緣(即搭邊不良),后續(xù)制程中將可能會(huì)產(chǎn)生繞鍍、劃痕等缺陷,導(dǎo)致硅片的良率大幅降低。
托盤沉臺(tái)開口邊緣與硅片下表面接觸的面積越小,太陽電池背面掩膜(即硅片棱邊附近的覆膜)的寬度越小,鍍膜的有效面積越大,太陽電池的光電轉(zhuǎn)換效率越高。因此,研究硅片搬運(yùn)機(jī)構(gòu)如何高精度、無損傷且快速地將硅片搬運(yùn)進(jìn)托盤沉臺(tái)開口內(nèi)具有重要意義。
在此背景下,本文研究了一種基于多目機(jī)器視覺技術(shù)的硅片搬運(yùn)機(jī)構(gòu),該新型硅片搬運(yùn)機(jī)構(gòu)配合4 軸高精度微動(dòng)平臺(tái)及龍門機(jī)械手等部件,可快速地將CVD 工藝制程完成后的硅片搬運(yùn)進(jìn)PVD 工藝制程的托盤沉臺(tái)開口內(nèi)。通過對傳統(tǒng)硅片搬運(yùn)機(jī)構(gòu)的機(jī)械結(jié)構(gòu)和動(dòng)作流程進(jìn)行分析,指出其存在的不足,然后分析新型硅片搬運(yùn)機(jī)構(gòu)獨(dú)特的動(dòng)作流程、機(jī)械結(jié)構(gòu)組成及特性,并重點(diǎn)分析新型硅片搬運(yùn)機(jī)構(gòu)使用多目機(jī)器視覺技術(shù)實(shí)現(xiàn)硅片位置檢測及硅片搭邊不良在線檢測的原理,以及其應(yīng)用優(yōu)勢。
1 傳統(tǒng)的硅片搬運(yùn)機(jī)構(gòu)
1.1 傳統(tǒng)硅片搬運(yùn)機(jī)構(gòu)的機(jī)械結(jié)構(gòu)與動(dòng)作流程
在傳統(tǒng)硅片搬運(yùn)機(jī)構(gòu)中,需要自動(dòng)上下料機(jī)構(gòu)將硅片放入托盤內(nèi),托盤內(nèi)硅片單邊間隙最小為0.25 mm,而硅片經(jīng)過皮帶傳輸以后的定位精度為±1.00 mm,因此硅片需要進(jìn)行二次定位。傳統(tǒng)的硅片一次定位(即硅片矯正)、二次定位機(jī)械結(jié)構(gòu)有很多種[1],其中某種硅片一次定位、二次定位機(jī)械結(jié)構(gòu)示意圖分別如圖1[1]、圖2[1]所示。

圖1 傳統(tǒng)的硅片一次定位機(jī)械結(jié)構(gòu)示意圖[1]Fig. 1 Schematic diagram of traditional mechanical structure for first positioning of silicon wafers[1]
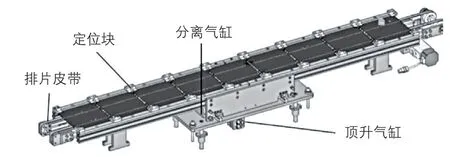
圖2 傳統(tǒng)的硅片二次定位機(jī)械結(jié)構(gòu)示意圖[1]Fig. 2 Schematic diagram of traditional mechanical structure for secondary positioning of silicon wafers[1]
傳統(tǒng)的硅片搬運(yùn)機(jī)構(gòu)的動(dòng)作流程[1]為:硅片在柔性傳輸帶上排列完成后(即完成硅片一次定位),被頂升氣缸驅(qū)動(dòng)的定位塊組件頂起,硅片自身的重力使其能沿著定位塊內(nèi)側(cè)斜壁下滑并落入每組定位塊內(nèi),實(shí)現(xiàn)硅片二次定位,一般定位精度可達(dá)到±0.20 mm。由于加工與裝配均存在誤差,且硅片自身尺寸也存在誤差,導(dǎo)致10%左右的硅片放入托盤沉臺(tái)開口時(shí)存在搭邊不良現(xiàn)象。
在硅片二次定位的同時(shí),托盤會(huì)被夾緊定位。當(dāng)硅片二次定位完成后,多軸機(jī)械手利用無痕吸盤將硅片吸起,搬運(yùn)至托盤的沉臺(tái)開口內(nèi)。傳統(tǒng)的硅片搬運(yùn)機(jī)構(gòu)示意圖如圖3[2]所示。

圖3 傳統(tǒng)的硅片搬運(yùn)機(jī)構(gòu)示意圖[2]Fig. 3 Schematic diagram of traditional silicon wafer handling mechanism[2]
1.2 傳統(tǒng)硅片搬運(yùn)機(jī)構(gòu)的缺點(diǎn)
雖然傳統(tǒng)的硅片搬運(yùn)機(jī)構(gòu)已在工業(yè)生產(chǎn)中被廣泛采用,但其依然具有以下缺點(diǎn)[3]:
1)定位方式未實(shí)現(xiàn)硅片搭邊不良的在線檢測。搭邊不良的硅片有可能成為失效片、低效片、隱裂片。
2)傳輸方式無法消除硅片搬運(yùn)機(jī)構(gòu)的累計(jì)誤差。硅片在皮帶線上完成二次定位后,定位精度為±0.20 mm。由于硅片搬運(yùn)機(jī)構(gòu)的裝配與傳輸均存在誤差,二者的累計(jì)誤差至少為±0.10 mm,從而使整個(gè)硅片搬運(yùn)機(jī)構(gòu)的精度誤差達(dá)到±0.30 mm。而硅片與托盤沉臺(tái)開口邊緣的單邊最小間隙僅為0.25 mm,且由于托盤在工藝設(shè)備中受到高溫加熱,托盤沉臺(tái)開口很容易向上凸起或向下凹陷變形,使托盤沉臺(tái)開口與硅片之間的間隙會(huì)越來越小。因此在傳統(tǒng)的硅片搬運(yùn)機(jī)構(gòu)中,將硅片搬運(yùn)至托盤沉臺(tái)開口內(nèi)時(shí),硅片極易與沉臺(tái)開口邊緣搭接,增大后續(xù)流程中硅片產(chǎn)生劃傷與繞鍍的風(fēng)險(xiǎn)。
3)硅片上的覆膜非常容易損壞,而傳統(tǒng)的硅片搬運(yùn)機(jī)構(gòu)在搬運(yùn)硅片進(jìn)托盤沉臺(tái)時(shí),均采用吸盤吸取硅片,吸盤的負(fù)壓有可能導(dǎo)致硅片產(chǎn)生吸盤印不良。
2 新型硅片搬運(yùn)機(jī)構(gòu)的動(dòng)作流程
本文提出的基于多目機(jī)器視覺技術(shù)的硅片搬運(yùn)機(jī)構(gòu)的動(dòng)作流程中,將平行于托盤傳輸線傳輸方向的托盤沉臺(tái)稱為列,共r列;垂直于托盤傳輸線傳輸方向的托盤沉臺(tái)稱為行,共m行。龍門機(jī)械手同時(shí)搬運(yùn)n片硅片,該機(jī)構(gòu)設(shè)有與列數(shù)對應(yīng)的r個(gè)4 軸高精度微動(dòng)平臺(tái)(其中:平行于托盤傳輸線傳輸方向的軸為x軸,垂直于托盤傳輸線傳輸方向的軸為y軸;垂直于地面的軸為z軸;水平方向順時(shí)針旋轉(zhuǎn)的軸為θ軸)和r+1 個(gè)相機(jī)。龍門機(jī)械手每搬運(yùn)1 次硅片,托盤就沿托盤傳輸線向前移動(dòng)1 行,以便下次硅片搬運(yùn)作業(yè)。該基于多目機(jī)器視覺技術(shù)的硅片搬運(yùn)機(jī)構(gòu)的具體動(dòng)作流程圖如圖4 所示。

圖4 基于多目機(jī)器視覺技術(shù)的硅片搬運(yùn)機(jī)構(gòu)的動(dòng)作流程圖Fig. 4 Action flowchart of silicon wafer handling mechanism based on multi camera machine vision technology
3 基于多目機(jī)器視覺技術(shù)的硅片搬運(yùn)機(jī)構(gòu)的機(jī)械結(jié)構(gòu)
基于多目機(jī)器視覺技術(shù)的硅片搬運(yùn)機(jī)構(gòu)的整體機(jī)械結(jié)構(gòu)包括:多目機(jī)器視覺系統(tǒng)、龍門機(jī)械手、硅片傳輸線、托盤傳輸線、微動(dòng)平臺(tái)等。其中,龍門機(jī)械手、硅片傳輸線、托盤傳輸線和微動(dòng)平臺(tái)上下依次布置;托盤傳輸線和硅片傳輸線垂直布置,具體如圖5 所示。需要說明的是,為了便于觀看,圖中機(jī)械結(jié)構(gòu)隱藏了部分機(jī)架。
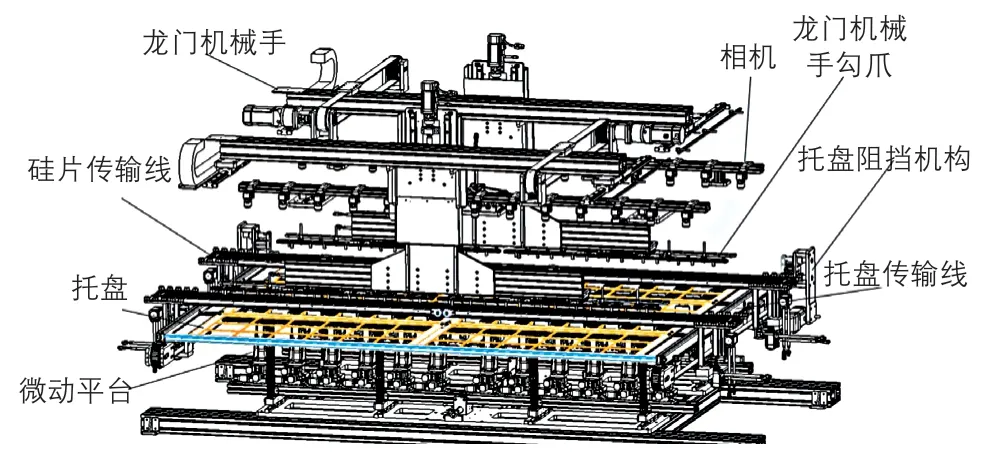
圖5 基于多目機(jī)器視覺技術(shù)的硅片搬運(yùn)機(jī)構(gòu)的整體機(jī)械結(jié)構(gòu)示意圖Fig. 5 Schematic diagram of overall mechanical structure of silicon wafer handling mechanism based on multi camera machine vision technology
基于多目機(jī)器視覺技術(shù)的硅片搬運(yùn)機(jī)構(gòu)具有以下特性:
1)效率方面。本機(jī)構(gòu)采用模塊化設(shè)計(jì),硅片傳輸線和托盤傳輸線為垂直布置,因此可設(shè)置多套硅片傳輸線、龍門機(jī)械手、多目機(jī)器視覺系統(tǒng)、4 軸高精度微動(dòng)平臺(tái)等,從而實(shí)現(xiàn)硅片搬運(yùn)效率的翻倍提升。例如圖5 中,使用了兩套龍門機(jī)械手、2r個(gè)4 軸高精度微動(dòng)平臺(tái)和2r+2 個(gè)相機(jī),將硅片搬運(yùn)效率提升了1 倍。若繼續(xù)增加龍門機(jī)械手的數(shù)量,硅片搬運(yùn)效率還可以進(jìn)一步提升。
2)精度方面。本機(jī)構(gòu)的動(dòng)作流程中,首先由龍門機(jī)械手抓取硅片傳輸線上的硅片運(yùn)送到微動(dòng)平臺(tái)(即托盤沉臺(tái)開口),再使用多目機(jī)器視覺系統(tǒng)和微動(dòng)平臺(tái)配合調(diào)整硅片位置,因此無需考慮龍門機(jī)械手搬運(yùn)硅片的誤差。
3)產(chǎn)品質(zhì)量方面。龍門機(jī)械手并未使用吸盤,而是采用了兩排非金屬材料的勾爪來夾取硅片,從根本上避免了吸盤印的產(chǎn)生。
4)功能方面。采用多目機(jī)器視覺系統(tǒng)后,增加了硅片搭邊不良的在線檢測功能。
4 多目機(jī)器視覺系統(tǒng)的檢測原理
4.1 位置檢測
本文提出的基于多目機(jī)器視覺技術(shù)的硅片搬運(yùn)機(jī)構(gòu)中,托盤、相機(jī)、微動(dòng)平臺(tái)、背光源的布局俯視圖如圖6 所示。托盤沉臺(tái)開口承托硅片的邊沿單邊寬度只有0.75 mm(即圖6 中的黃色部分);托盤沉臺(tái)中間為鏤空結(jié)構(gòu)。
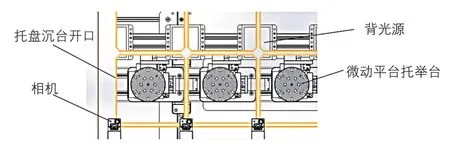
圖6 托盤、相機(jī)、微動(dòng)平臺(tái)、背光源的布局俯視圖Fig. 6 Top view of layout of tray,camera, micro motion platform,and backlight source
當(dāng)托盤停止運(yùn)動(dòng)后,相機(jī)位于托盤沉臺(tái)的邊角正上方,微動(dòng)平臺(tái)位于托盤沉臺(tái)開口的正下方;此時(shí)相機(jī)進(jìn)行第1 次拍照,記錄托盤沉臺(tái)開口的位置和角度信息。微動(dòng)平臺(tái)的z軸上升,其托舉臺(tái)穿過托盤沉臺(tái)網(wǎng)框的鏤空孔,上升到高于托盤沉臺(tái)開口一定高度的位置。龍門機(jī)械手先將硅片搬運(yùn)到微動(dòng)平臺(tái)托舉臺(tái)上表面的吸附板上,真空發(fā)生器開啟負(fù)壓,吸附板將硅片輕微吸緊,防止硅片移動(dòng);此時(shí)相機(jī)進(jìn)行第2 次拍照,記錄硅片與托盤沉臺(tái)開口的位置和角度信息。調(diào)整微動(dòng)平臺(tái)θ軸、x軸和y軸位置來進(jìn)行硅片角度及位置偏移校準(zhǔn)。當(dāng)微動(dòng)平臺(tái)完成第1 次偏移校準(zhǔn)后,相機(jī)進(jìn)行第3 次拍照,再次進(jìn)行x軸、y軸、θ軸校準(zhǔn),以便提高放片精度。硅片角度和位置調(diào)整完成后,真空發(fā)生器破真空,硅片脫離微動(dòng)平臺(tái)托舉臺(tái)上表面的吸附板,微動(dòng)平臺(tái)的z軸下降,硅片轉(zhuǎn)移至托盤沉臺(tái)內(nèi)。
為了降低硬件成本和提高拍照精度,多目機(jī)器視覺系統(tǒng)采用小視野拍照。因?yàn)橥认袼叵拢ㄟ^調(diào)節(jié)矩陣相機(jī)的焦距來調(diào)整拍照視野,拍照視野越小,精度越高。除了托盤兩側(cè)的相機(jī),每個(gè)相機(jī)同時(shí)拍攝兩個(gè)托盤沉臺(tái)開口和相應(yīng)的硅片的邊角;根據(jù)兩個(gè)相機(jī)拍攝得到的信息,通過耦合算法,計(jì)算出硅片3 條邊與托盤沉臺(tái)開口3 條邊的相對位置。本機(jī)構(gòu)通過在硅片的邊上和托盤沉臺(tái)開口的邊上各取數(shù)個(gè)點(diǎn),進(jìn)行多次直線插補(bǔ)運(yùn)算,以提高多目機(jī)器視覺系統(tǒng)的測量精度。針對1 片硅片而言,硅片位置及角度調(diào)整示意圖如圖7 所示。圖中:A、B分別代表相機(jī)1、相機(jī)2 拍攝的需要偏移校準(zhǔn)的角度值;C、D和E、F分別為設(shè)置在硅片和托盤沉臺(tái)角上的標(biāo)記點(diǎn);x1、x2均表示微動(dòng)平臺(tái)的x軸方向要調(diào)整的距離;y1、y2均表示微動(dòng)平臺(tái)的y軸方向要調(diào)整的距離。

圖7 硅片位置及角度調(diào)整示意圖Fig. 7 Schematic diagram of silicon wafer position and angle adjustment
雖然理論上相機(jī)1 拍攝到的角度A和相機(jī)2 拍攝到的角度B相等,但是由于托盤沉臺(tái)可能存在變形,因此微動(dòng)平臺(tái)θ軸的實(shí)際調(diào)整角度θa的計(jì)算式為:
同理,微動(dòng)平臺(tái)x軸的實(shí)際調(diào)整距離xa的計(jì)算式為:
微動(dòng)平臺(tái)y軸的實(shí)際調(diào)整距離ya的計(jì)算式為:
采用此算法后再進(jìn)行調(diào)整能增加托盤的使用壽命,降低生產(chǎn)成本。
4.2 硅片搭邊不良在線檢測
基于多目機(jī)器視覺技術(shù)的硅片搬運(yùn)機(jī)構(gòu)采用先搬運(yùn)硅片再調(diào)整硅片位置的獨(dú)特動(dòng)作流程,在搬運(yùn)硅片過程中,產(chǎn)生硅片搭邊不良的可能性極低。通過客戶的PVD 自動(dòng)化設(shè)備的實(shí)際生產(chǎn)對該機(jī)構(gòu)的硅片搭邊不良情況進(jìn)行了驗(yàn)證,結(jié)果顯示,該機(jī)構(gòu)的搭邊不良率小于0.1%,達(dá)到了國內(nèi)領(lǐng)先水平。
當(dāng)硅片放入托盤沉臺(tái)開口內(nèi)后,相機(jī)將第4次拍照,檢測托盤上是否有搭邊不良的硅片。由于新型硅片搬運(yùn)機(jī)構(gòu)在x軸和y軸方向上的硅片搭邊不良在線檢測的原理基本相同,所以本文以x軸為例進(jìn)行說明。
該新型硅片搬運(yùn)機(jī)構(gòu)的所有相機(jī)均安裝在同一高度,且相機(jī)之間的間距相等且已知,間距設(shè)為L,位于相鄰兩個(gè)托盤沉臺(tái)連接線中心上方的相機(jī)1、相機(jī)2 的中心坐標(biāo)分別為(xc1,yc1)、(xc2,yc2)。此外,硅片邊長最大允許尺寸為Xmax,最小允許尺寸為Xmin。多目機(jī)器視覺系統(tǒng)在相機(jī)第4 次拍照后測量得出硅片左邊緣和右邊緣的x軸坐標(biāo)分別為xgl、xgr(對應(yīng)的y軸坐標(biāo)分別為ygl、ygr),而相機(jī)在第1 次拍照時(shí)已記錄得到的托盤沉臺(tái)開口左、右限位x軸坐標(biāo)分別為xtl、xtr(對應(yīng)的y軸坐標(biāo)分別為ytl、ytr)。硅片搭邊不良在線檢測示意圖如圖8 所示。

圖8 硅片搭邊不良在線檢測示意圖Fig. 8 Schematic diagram of online detection of poor silicon wafer edging
由此可以得到:
托盤沉臺(tái)的設(shè)計(jì)寬度限定條件為:
若相機(jī)第1 次拍照時(shí),出現(xiàn)xtr-xtl<Xmax+0.5,則會(huì)出現(xiàn)托盤需要維護(hù)的報(bào)警。
在未出現(xiàn)硅片搭邊不良,且托盤和硅片的尺寸滿足設(shè)計(jì)與質(zhì)檢要求的情況下,以下條件將得到滿足:
使用邏輯“或”判定是否存在硅片搭邊不良,以下條件滿足任意1 個(gè)即判斷為硅片搭邊不良:
1)xgl<xtl,為左側(cè)搭邊不良;
2)xgr>xtr,為右側(cè)搭邊不良;
3)xgr-xgl<Xmin。
4.3 基于多目機(jī)器視覺技術(shù)的硅片搬運(yùn)機(jī)構(gòu)的應(yīng)用優(yōu)勢
在硅片變薄的發(fā)展趨勢下,基于多目機(jī)器視覺技術(shù)的硅片搬運(yùn)機(jī)構(gòu)的設(shè)計(jì)使其具有很大的應(yīng)用優(yōu)勢,原因在于:
1)在新型硅片搬運(yùn)機(jī)構(gòu)中,硅片在放入托盤沉臺(tái)前,平放在微動(dòng)平臺(tái)托舉臺(tái)上,硅片的受力面積較大,變形很小;而傳統(tǒng)的硅片搬運(yùn)機(jī)構(gòu)采用吸盤吸取硅片,硅片的受力面積較小,變形較大,因此產(chǎn)生硅片搭邊不良的概率更高。
2)本新型硅片搬運(yùn)機(jī)構(gòu)采用多目機(jī)器視覺技術(shù)與微動(dòng)平臺(tái)配合進(jìn)行硅片定位,不會(huì)對硅片產(chǎn)生使其受力變形的側(cè)向力;而傳統(tǒng)的硅片搬運(yùn)機(jī)構(gòu)采用導(dǎo)輪與定位塊進(jìn)行硅片定位,均會(huì)對硅片產(chǎn)生側(cè)向力,硅片可能變形,導(dǎo)致定位精度下降。
3)本新型硅片搬運(yùn)機(jī)構(gòu)中,當(dāng)硅片的厚度很小時(shí),將增加硅片變形修正值P(其取值可從生產(chǎn)經(jīng)驗(yàn)中得到),即當(dāng)xgr-xgl<Xmin-P時(shí),可判斷為硅片搭邊不良。這是因?yàn)楣杵鼙。斜P沉臺(tái)開口深度很淺,即使硅片搭邊,硅片與水平面之間的傾角也非常小;并且由于托盤沉臺(tái)中間是大面積鏤空結(jié)構(gòu),因此無論是否有硅片搭邊不良,托盤沉臺(tái)與硅片的接觸面積都很小。硅片搭邊不良與硅片正確地放在托盤沉臺(tái)開口內(nèi)時(shí)硅片的變形量幾乎相等,此時(shí)需增加硅片變形修正值以幫助判斷是否存在硅片搭邊不良。
4)本新型硅片搬運(yùn)機(jī)構(gòu)有利于減小太陽電池背面掩膜寬度,增加了太陽電池的有效吸光面積,從而可提高其光電轉(zhuǎn)換效率。
5 結(jié)論
太陽電池產(chǎn)業(yè)最大的競爭就是成本的競爭。更高的原材料利用率,更高的太陽電池生產(chǎn)效率才能讓光伏產(chǎn)業(yè)在國家新能源戰(zhàn)略中占據(jù)更高的位置。本文研究了一種基于多目機(jī)器視覺技術(shù)的硅片搬運(yùn)機(jī)構(gòu),在分析傳統(tǒng)硅片搬運(yùn)機(jī)構(gòu)的機(jī)械結(jié)構(gòu)和動(dòng)作流程的基礎(chǔ)上,對該新型硅片搬運(yùn)機(jī)構(gòu)獨(dú)特的動(dòng)作流程、機(jī)械結(jié)構(gòu)及特性進(jìn)行了介紹,并重點(diǎn)分析了其使用多目機(jī)器視覺技術(shù)實(shí)現(xiàn)硅片位置檢測及硅片搭邊不良在線檢測的原理。本機(jī)構(gòu)的創(chuàng)新性在于引入了多目機(jī)器視覺技術(shù)和獨(dú)特的動(dòng)作流程,從而解決了硅片搬運(yùn)過程中可能產(chǎn)生吸盤印、劃傷、隱裂等缺陷的問題。采用高精度多目機(jī)器視覺系統(tǒng)的硅片搬運(yùn)機(jī)構(gòu)有利于減小太陽電池背面掩膜寬度,增加太陽電池的有效吸光面積,從而可提高其光電轉(zhuǎn)換效率。
