用于紫外光譜儀的探測器溫度控制系統(tǒng)
2024-02-05 09:06:58馬慶軍林冠宇
中國光學 2024年1期
關鍵詞:系統(tǒng)
蔣 雪,侯 漢,馬慶軍,林冠宇
(中國科學院 長春光學精密機械與物理研究所,吉林 長春 130033)
1 引言
大氣臭氧(O3)、平流層氣溶膠等微量氣體的密度和垂直分布情況,對氣候變化和大氣環(huán)境研究有重要價值。FY-3 紫外臨邊光譜儀是借助衛(wèi)星平臺觀測地球臨邊大氣紫外-可見波段太陽后向散射的光學遙感儀器。探測獲得的光譜遙感信息對于農業(yè)、氣候、軍事等方面的發(fā)展具有重要意義[1-3]。
FY-3 紫外臨邊光譜儀,選用的是英國e2v 公司生產的背照式互補金屬氧化物半導體(CMOS)探測器,測量范圍是290 nm~500 nm 紫外波段。CMOS 探測器和電荷耦合器件(CCD)探測器性能相當,但是CMOS 探測器具有驅動時序復雜度低、開發(fā)周期短、成本低的優(yōu)點。CMOS 探測器分為背照式和正照式兩種。背照式CMOS 探測器的結構布局使其不受遮擋,故其比正照式CMOS 探測器接收光子的能力更強,靈敏度更高,更適合用于航天領域。因此,本文選用背照式CMOS 探測器。但是,由于背照式CMOS 探測器的工藝特殊,在常溫條件下產生的暗電流較高,噪聲較大,為了提高圖像質量,需要將背照式CMOS 探測器置于低溫條件下應用。除此之外,極速的溫度變化產生的溫度沖擊可能會對背照式CMOS 探測器造成不可逆的損傷,導致探測器獲取的圖像出現(xiàn)大量的異常像素。這些異常像素的光響應情況不同于正常像素的感光情況,將影響圖像質量。為了解決上述問題,本文設計了探測器溫度控制系統(tǒng),以使探測器的溫度達到控制要求。
本文設計的探測器溫度控制系統(tǒng)核心采用的是PID 控制。PID 控制算法是一種應用于過程控制的閉環(huán)控制算法,可以起到動態(tài)修正實測值與目標值之間偏差的作用,廣泛應用于各種工業(yè)控制中的連續(xù)系統(tǒng)[4-5]。傳統(tǒng)的溫控系統(tǒng)是在硬件上搭建PID 控制單元,用模擬控制的方式調節(jié)探測器溫度。這種模擬控制方式的靈活度很低,不易更改,調試難度較高[6-7]。本文設計的溫度控制系統(tǒng)是基于FPGA 實現(xiàn)的數(shù)字PID 控制。這種數(shù)字控制方式靈活度很高,可以在軟件界面預留參數(shù)輸入入口。通過更改控制參數(shù),靈活調整制冷目標溫度、溫變速度與溫控精度,這種調節(jié)的靈活性大大提高了儀器的研制效率,而且在軌觀測時,如遇突發(fā)狀況也可以靈活應對。但是直接使用PID 控制算法會帶來一些問題,比如,偏差過大引起的溫度沖擊問題[8-10],積分飽和問題。本文通過加入輸入過渡過程和抗積分飽和處理對基礎PID 控制進行改進,最終達到探測器溫度的控制要求。
本文介紹了FY-3 紫外臨邊光譜儀探測器溫度控制系統(tǒng)的組成、工作原理和實現(xiàn)方法。通過多次大型整機環(huán)境實驗驗證該系統(tǒng)性能。結果表明:本系統(tǒng)可實現(xiàn)對FY-3 紫外臨邊光譜儀CMOS探測器溫度的精確控制,探測器目標溫度可以靈活更改,并且在指定控制參數(shù)下,可以使探測器溫度變化速率和控溫精度均滿足控制要求。
2 溫度控制系統(tǒng)的構成及其工作原理
FY-3 紫外臨邊光譜儀的安裝位置是艙內,在軌運行時,儀器的環(huán)境溫度是室溫。根據(jù)探測器的特性和探測需求,需要將CMOS 探測器的工作溫度保持在-10 °C,低于環(huán)境溫度。所以設計的CMOS 探測器的溫度控制系統(tǒng)需具備降溫功能。而對于探測器工作結束后的回溫過程,則可以通過逐漸減弱制冷器的制冷強度,再通過探測器自身與環(huán)境的熱交換,使探測器溫度恢復到環(huán)境溫度,故CMOS 探測器的溫控系統(tǒng)不需要具備升溫功能。除此之外,還需要保證探測器的溫度不被周圍電源模塊、汞燈、鎢燈等其他輻射源干擾。
2.1 CMOS 溫度控制系統(tǒng)的構成
圖1 為溫度控制系統(tǒng)結構圖。本溫控系統(tǒng)由溫度采集單元、算法控制單元、功率控制單元、半導體制冷器、CMOS 探測器組成。
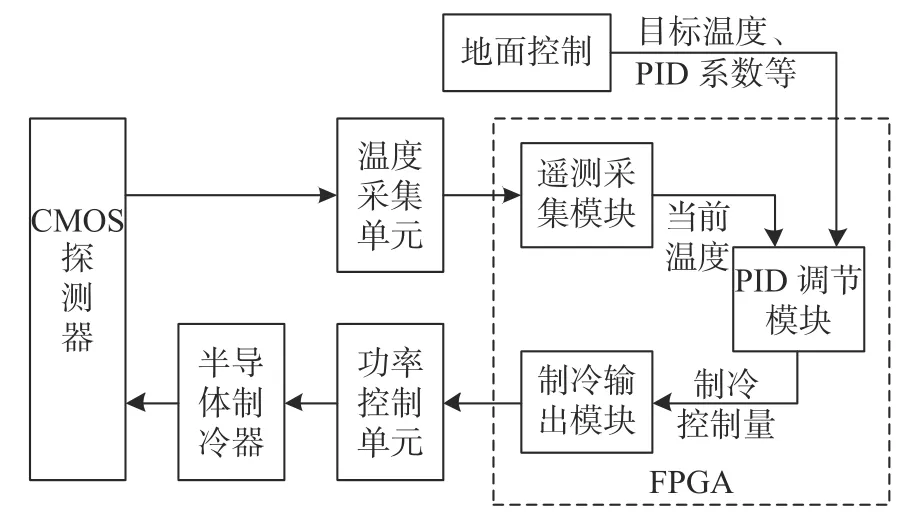
圖1 溫度控制系統(tǒng)結構圖Fig.1 Block diagram of temperature control system
探測器內置MF501 測溫熱敏電阻。溫度采集單元由多路選擇器、運算放大器、A/D 轉換器組成。功率控制單元由D/A 轉換器、運算放大器、場效應管組成。算法控制單元由FPGA 實現(xiàn),內含遙測采集模塊、PID 調節(jié)模塊、制冷輸出等模塊。
2.2 溫度控制系統(tǒng)的工作原理
系統(tǒng)采用帕爾貼效應對探測器制冷。制冷器與焦平面之間安裝了導熱塊。探測器的溫度通過導塊傳輸?shù)浇蛊矫妫M而傳輸?shù)接糜谡麢C散熱的熱管中。
設定遙測采集周期為500 ms,F(xiàn)PGA 控制遙測采集模塊每間隔500 ms 驅動一次外部DAC,采集探測器當前溫度遙測值。PID 調節(jié)單元根據(jù)來自地面注入的目標溫度、PID 系數(shù),結合當前溫度遙測值,利用增量式PID 算法計算出制冷控制增量,控制增量與上次輸出的控制量疊加得到當前控制量,然后制冷輸出模塊驅動外部DAC 將當前控制量輸出到功率控制單元,功率控制單元將制冷控制量作用到制冷器上,實現(xiàn)對探測器制冷。
周期地循環(huán)上述過程,即可實現(xiàn)對探測器溫度的動態(tài)調節(jié)。合適的制冷電流變化規(guī)律可以使探測器以指定的溫變速率變化到目標溫度,并且以一定精度穩(wěn)定在目標溫度。本系統(tǒng)中,F(xiàn)PGA輸出的制冷控制量越大,制冷電流越大,系統(tǒng)制冷強度越強。制冷控制量與制冷強度正相關。
3 溫度控制系統(tǒng)的關鍵算法
3.1 PID 算法
PID 控制原理圖如圖2 所示。PID 算法由比例項(Proportion)、積分項(Integral)、微分項(Differential)組成。設目標值為r(t),實測值為y(t),PID 控制算法的輸入為目標值與實測值的偏差e(t),輸出為u(t)。PID 算法對一段時間以來的偏差e(t)進行比例、積分、微分計算,得到控制值u(t),將控制值u(t)作用到被控對象,即可實現(xiàn)對被控對象的控制[10]。

圖2 PID 控制原理圖Fig.2 Schematic diagram of PID control
設比例項系數(shù)為Kp,積分時間常數(shù)為Ti,微分時間常數(shù)為Td,PID 控制算法在連續(xù)系統(tǒng)中的公式為:
由式(1)可知,當溫度偏差存在時,比例項將針對當前偏差立即起到減小偏差的作用;積分項是針對過去所有的偏差,起到消除系統(tǒng)偏差的作用;微分項是根據(jù)偏差的變化規(guī)律提前阻止即將發(fā)生的變化。對于這種結合現(xiàn)在、過去、將來的控制,理論上,如果系數(shù)合適,即可實現(xiàn)對被控對象的動態(tài)校正。
3.2 數(shù)字PID 算法
由于數(shù)字控制是一種離散采樣的過程,需要將模擬PID 控制算法離散轉化成數(shù)字PID 算法后,才能應用于數(shù)字控制中。數(shù)字PID 算法有兩種:位置式PID 算法和增量式PID 算法。
3.2.1 位置式PID 算法
位置式PID 算法是由模擬PID 算法離散化后直接得到的。設采樣間隔為T,采樣序號為k,模擬PID 算法離散化后,即得到位置式PID 算法表達式:
其中,Ki是積分項系數(shù),Kd是微分項系數(shù)。
3.2.2 增量式PID 算法
增量式PID 算法是由位置式PID 算法變形而來,它的輸出為控制量的增量 Δuk。增量式PID 算法與位置式PID 算法的關系為:
將式(2)位置式PID 算法的表達式帶入式(3),得到增量式PID 算法表達式:
對比式(2)和式(4)可以看出,位置式PID 算法需要對歷次的偏移量進行累加和計算,而增量式PID 算法只需要計算最近三次的偏移量。二者相比較,增量式PID 算法的計算量更小、穩(wěn)定性更強,更適用于基于FPGA 的數(shù)字控制系統(tǒng)。
由于本系統(tǒng)內的功率控制單元不具備記憶能力,不能接收控制增量只能接收控制量,所以選擇用FPGA 儲存上次的控制量,利用式(3),將上次的控制量與本次計算的控制增量相加,得到本次控制量,最終將本次控制量輸出到功率控制單元實現(xiàn)控制。
3.3 算法的改進
3.3.1 目標值過渡過程
PID 算法是一種快速調整偏差的算法,如果實測值與目標值的偏差很大,為了快速校正偏差,會產生較大的控制量。在本系統(tǒng)中,當系統(tǒng)剛啟動或探測器目標溫度改變時,制冷目標溫度與探測器當前溫度可能會相差較大。這種情況下,為了使探測器溫度達到目標溫度,PID 控制會連續(xù)產生最大制冷電流,使探測器溫度快速下降。但是由于背照式CMOS 探測器的工藝特性,溫度沖擊可能會對探測器造成不可逆的損壞。為了提高系統(tǒng)穩(wěn)定性,延長探測器壽命,要求探測器的溫度按照4 °C/min~5 °C/min 的速度變化。
考慮到探測器要求的溫變速率區(qū)間較小,但是探測器溫度對制冷電流的響應很快,設計時在PID 算法的前端增加了一個過渡過程控制。使輸入到PID 算法的探測器目標溫度按照要求的溫變速率緩慢變化。
已知要求的變化速率為4 °C/min~5 °C/min,那么將4.5 °C/min 作為目標溫度過渡過程的變化速率v。為了便于調試,將時間步長n與溫度增量ΔT均設計為界面可輸入的參數(shù)。則有,
由于系統(tǒng)采樣間隔是500 ms,所以時間步長的單位是500 ms。這個過渡過程可使每間隔n個500 ms,輸入到PID 控制器的目標溫度增加或減少 ΔT。通過多次單機、整機、整星大型環(huán)境實驗可以證明,當設置n=8,ΔT=0.3 °C 時,在回溫和制冷的過程中,均可使探測器溫度變化速度達到要求的4 °C/min~5 °C/min。
3.3.2 抗積分飽和控制
PID 調節(jié)單元輸出的制冷控制量是通過外部DAC 作用到制冷器的。真正作用到制冷器的控制量的范圍受DAC 的量化位數(shù)限制。本系統(tǒng)中使用的DAC 是12 位量化,那么,實際可輸出的控制量的碼值范圍是000H 至FFFH。
本系統(tǒng)有制冷功能沒有加熱功能。控制探測器制冷是增大控制量的過程;控制探測器回溫是減小控制量的過程。PID 調節(jié)單元輸出到DAC的控制量越大,那么制冷電流越大,系統(tǒng)的制冷強度越強。當控制量為FFFH 時,制冷電流達到最高,值為1.1 A。反之,PID 調節(jié)單元輸出到DAC的控制量越小,那么制冷電流越小,系統(tǒng)的制冷強度越弱,當控制量為000H 時,制冷電流達到最小,值為0 A。此時制冷電路的開關狀態(tài)不變,只是不起制冷作用。
當PID 算法得到的控制量低于極限小值000H,或高于極限大值FFFH 時,如果不對輸出做限幅處理而直接截斷輸出,那么實際制冷作用可能會與預期相差較大,甚至相悖。這種情況將會導致制冷時間過長,甚至出現(xiàn)震蕩而無法制冷,達到目標溫度。
這種現(xiàn)象是由積分飽和導致的,解決的辦法是對PID 調節(jié)單元的輸出做限幅處理,即,當PID 算法得到的控制量超過FFFH,那么PID 調節(jié)單元將輸出最大邊界值FFFH,并且取消積分作用,即將積分項系數(shù)置0;當PID 算法得到的控制量是負值,那么PID 調節(jié)單元將輸出最小邊界值000H,并且取消積分作用,即將積分項系數(shù)置0。只有當控制量在000H 至FFFH 范圍時,才執(zhí)行積分運算,并輸出控制量。
4 溫度控制系統(tǒng)的實現(xiàn)
4.1 數(shù)字PID 算法
由圖3 探測器溫度碼值曲線可知,探測器的溫度越低,對應的碼值越大;在本系統(tǒng)中,輸出控制量越大,制冷效果越強。在本系統(tǒng)中,偏差為目標值減去實測值,即:

圖3 探測器溫度和碼值關系曲線Fig.3 Relationship between detector temperature and code values
即,當制冷目標溫度大于當前溫度時,溫度偏差的符號為正,否則為負。
圖4 為此溫度控制系統(tǒng)的軟件實現(xiàn)流程。按照系統(tǒng)要求,遙測采樣的間隔為500 ms。在溫控流程中,每個遙測采樣時刻均為一次溫度調節(jié)的開始時刻。此溫控系統(tǒng)的實現(xiàn)流程為:

圖4 溫度控制系統(tǒng)的軟件流程圖Fig.4 Flow chart of temperature control system software
當采樣時刻到來時,首先,從遙測采集模塊讀取探測器當前溫度遙測值,同時讀取經(jīng)過前置濾波器的當前目標溫度 ;
接著,計算當前溫度遙測與目標溫度值的偏差,并標記偏差的符號,同時緩存前兩次的溫度偏差和偏差的符號;
然后,將最近三次的偏差和偏差符號帶入增量式PID 算法,計算控制增量并標記控制增量的符號;
利用式(3),將控制增量與上一次的控制量疊加,得到當前控制量;
再對當前控制量做限幅處理,得到最終要輸出的控制量;
最后,驅動外部DAC 將限幅后的控制量輸出到功率控制單元,進而作用到制冷器。此時一次溫度調節(jié)結束,等待下一次采樣時刻到來,重復上面過程,開展新一次溫度調節(jié)。
4.2 PID 參數(shù)整定
PID 控制算法由比例項、積分項、微分項組成,每一項的系數(shù)決定了該項作用的強弱。
比例項的作用是快速修正偏差,比例項系數(shù)越大,效果越強,但如果比例項系數(shù)過大,將會產生較大超調;積分項的作用是補償系統(tǒng)的靜差,積分時間常數(shù)越小,積分項作用越強,消除系統(tǒng)靜差的時間越短,但如果積分項作用過強,將會引起振蕩;微分項的作用是提前阻止偏差的變化,在偏差變化之前進行修正,適用于噪聲較小的系統(tǒng),微分時間常數(shù)越大,微分項作用越強,合適的微分項系數(shù)可以加快修正速度,提高系統(tǒng)穩(wěn)定性。
PID 參數(shù)整定方法有臨界比例法、反應曲線法、衰減法和經(jīng)驗法。本系統(tǒng)采用經(jīng)驗湊試法,通過多次試驗,根據(jù)實際控制情況,按照比例系數(shù)、積分系數(shù)、差分系數(shù)的順序調整,最終選擇合適的PID 系數(shù)。
5 測量實驗與結果
經(jīng)過多次整機溫度循環(huán)、老煉等環(huán)境實驗發(fā)現(xiàn),F(xiàn)Y-3 紫外臨邊光譜儀探測器溫控系統(tǒng)制冷或回溫的溫度變化速率均可通過數(shù)據(jù)注入靈活調節(jié),目標溫度也可通過數(shù)據(jù)注入靈活控制。該系統(tǒng)可在指定參數(shù)下滿足探測器溫度的控制要求。
系統(tǒng)要求探測器制冷和回溫的速率均滿足4 °C/min~5 °C/min。在多次環(huán)境實驗中,隨機提取一次制冷過程曲線如圖5(彩圖見期刊電子版)所示,一次回溫過程曲線如圖6(彩圖見期刊電子版)所示。

圖5 制冷過程曲線Fig.5 Temperature cooling curve of the detector
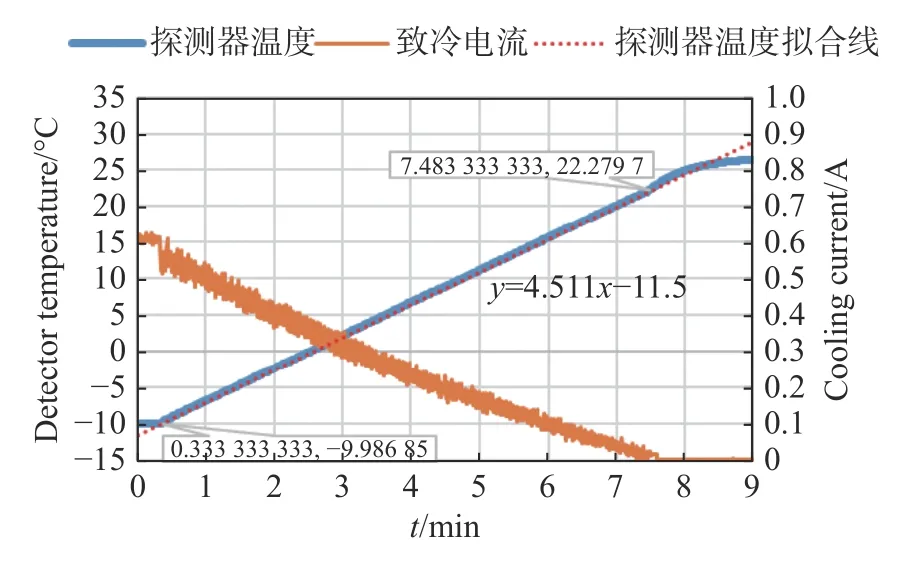
圖6 回溫過程曲線Fig.6 Temperature rising curve of the detector
由圖5 制冷過程曲線可以看出,隨著制冷電流的增大,探測器溫度在降低。由圖6 回溫過程曲線可看出,隨著制冷電流減小,探測器溫度在升高。制冷電流在變化過程中有微小的調整,使得探測器溫度基本呈線性變化。將圖5 和圖6 中探測器溫度曲線在溫度變化階段進行擬合。可以看出,探測器溫度的變化速率控制在了(4.5±0.05) °C/min內,滿足指標范圍要求。
探測器制冷目標溫度默認為-10 °C,但也可根據(jù)實驗情況隨時調整,如圖7 和圖8 分別為制冷目標溫度為-5 °C 和-10 °C 時,在一個軌道時間內持續(xù)工作過程中,探測器溫度散點圖。可見,目標溫度分別為-5 °C 和-10 °C 時,控制誤差均可以達到±0.1 °C,優(yōu)于指標±0.2 °C。

圖7 目標溫度為-5 °C 時的溫度散點圖Fig.7 Scatter plot of temperature at a target temperature of-5 °C
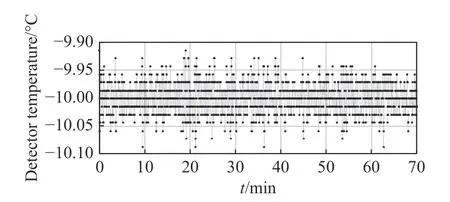
圖8 目標溫度為-10 °C 時的溫度散點圖Fig.8 Scatter plot of temperature at a target temperature of-10 °C
FY-3 紫外臨邊光譜儀使用的探測器有效感光區(qū)域為2 000×100,光譜維覆蓋2 000 行,空間維覆蓋100 列。在軌運行時,對有效感光圖像的光譜維2 000 行不合并,空間維100 個像元合并后再下傳。
使用鎢燈作為標準光源,積分時間設置為12 s,分別在室溫23 °C 條件和制冷到-10 °C 條件下拍攝100 幀,曲線對比情況如圖9(彩圖見期刊電子版)所示。圖9 橫坐標為有效感光區(qū)域的光譜維行序號1~2 000;縱坐標為有效感光區(qū)域的空間維100 個像元合并后的DN 值。

圖9 不同溫度的鎢燈曲線圖Fig.9 Temperature curves of different tungsten lamps
由圖9 可看出,常溫下,曲線有兩處尖峰,這是由探測器上的壞點造成的,它們對于光響應與其他正常像素的反應不同。通過使探測器降溫,異常像素的光響應將恢復正常,曲線的異常尖峰值也將消失。并且,溫度的降低使得探測器的暗電流降低,光譜曲線向下平移,并且噪聲減小,光譜曲線更加平滑。取對應像元在100 幀內的平均值作為信號值,標準差作為噪聲,信號值除以噪聲可得到信噪比。繪制信噪比曲線如圖10 所示。可見,信噪比在探測器溫度為-10 °C 時比溫度為23 °C 時有所提高。

圖10 不同溫度的信噪比曲線Fig.10 SNR curves at different temperatures
將入光口遮住,使探測器置于暗場環(huán)境,積分時間設置為12 s,分別在室溫23 °C 條件和制冷到-10 °C 條件下拍攝100 幀圖像。剔除上述兩處尖峰位置的異常點,計算對應像元在100 幀的標準差,作為暗噪聲,繪制曲線如圖11 所示。可見,在制冷的作用下,探測器暗噪聲得到了有效抑制。
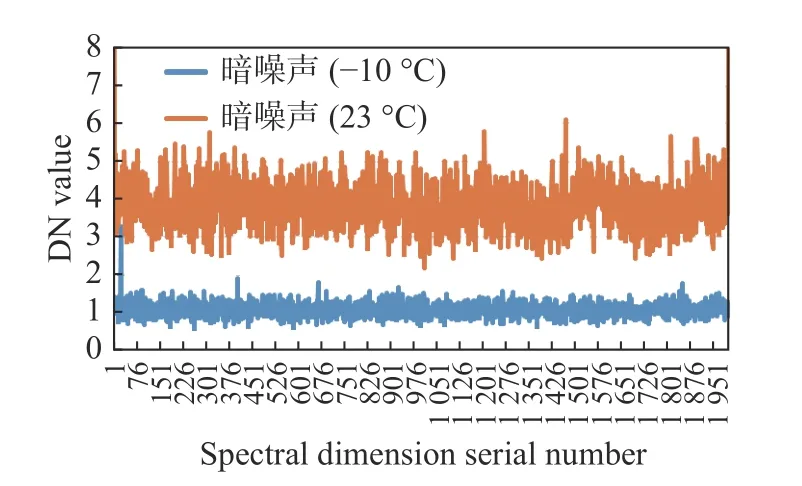
圖11 不同溫度的暗噪聲曲線Fig.11 Dark noise curves at different temperatures
6 結論
本文介紹了一種FY-3 紫外臨邊光譜儀探測器的溫度控制系統(tǒng)。通過對比實驗看出,低溫條件下,F(xiàn)Y-3 紫外臨邊光譜儀探測器的噪聲得到了有效抑制。通過多次大型整機環(huán)境實驗可以證明,此溫控系統(tǒng)的目標溫度和溫變速率均可通過數(shù)據(jù)注入靈活調節(jié)。在指定參數(shù)下,制冷速率和回溫速率均可以控制在(4.5±0.05) °C/min,滿足4 °C/min~5 °C/min 的指標要求。在不同目標溫度下,控溫精度均可達到±0.1 °C,優(yōu)于指標要求。本文所設計的探測器溫度控制系統(tǒng)具有靈活度高,控溫精度高,抗干擾能力強的特點。
猜你喜歡
工業(yè)設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經(jīng)濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32
- 中國光學的其它文章
- Design of all-optical logic gate based on two-dimensional photonic crystal
- All-solid-state acousto-optic mode-locked laser operating at 660 nm
- Stimulated brillouin scattering in double-clad thulium-doped fiber amplifier
- Optical simulation design of surface mounted device beads for wide beam and high uniformity display
- TDLAS 氣體激光遙測高靈敏光電探測電路設計
- 空間目標軌道外熱流計算及輻射特性研究