不同GNSS在高緯度地區(qū)時(shí)間傳遞性能分析
2024-01-30 09:16:22陶琳琳張鵬飛王培源
導(dǎo)航定位與授時(shí) 2023年6期
關(guān)鍵詞:系統(tǒng)
陶琳琳,涂 銳,張鵬飛,左 航,王培源,方 婧
(1.中國(guó)科學(xué)院國(guó)家授時(shí)中心,西安 710600;2.中國(guó)科學(xué)院大學(xué)集成電路學(xué)院,北京 100049;3.中國(guó)科學(xué)院精密導(dǎo)航定位與定時(shí)技術(shù)重點(diǎn)研究室,西安 710600)
0 引言
基于全球衛(wèi)星導(dǎo)航系統(tǒng)(global navigation satellite system,GNSS)的高精度時(shí)間傳遞是全球各守時(shí)實(shí)驗(yàn)室參與國(guó)際標(biāo)準(zhǔn)時(shí)間(coordinated universal time,UTC)計(jì)算和保持時(shí)間同步的關(guān)鍵技術(shù)之一,對(duì)推進(jìn)國(guó)家軍事戰(zhàn)略水平、科技快速發(fā)展具有重要意義[1]。該技術(shù)主要包括共視[2]、全視[3-4]、載波相位時(shí)間傳遞技術(shù)[5-6]。共視是指兩臺(tái)GNSS接收機(jī)在同一時(shí)刻觀測(cè)到一顆或多顆相同衛(wèi)星,通過(guò)衛(wèi)星鐘這一公共參考源交換兩地原子鐘的時(shí)間偏差。但因該方法受作用范圍限制,眾多學(xué)者采用全視法,即直接觀測(cè)所有衛(wèi)星后求解該地時(shí)間與衛(wèi)星星歷參考時(shí)間的差值。在傳統(tǒng)全視方法的基礎(chǔ)上增加載波相位觀測(cè)量的時(shí)間傳遞方法,稱(chēng)為載波相位時(shí)間傳遞方法,該方法與導(dǎo)航定位中的精密單點(diǎn)定位(precise point positioning,PPP)技術(shù)原理一致,因此又將載波相位時(shí)間傳遞稱(chēng)為GNSS PPP 時(shí)間傳遞。目前,GNSS PPP時(shí)間傳遞技術(shù)是全球衛(wèi)星導(dǎo)航定位技術(shù)在高精度時(shí)間傳遞領(lǐng)域的主要研究方法之一,基于該方法可實(shí)現(xiàn)亞納秒級(jí)精度的時(shí)間傳遞,同時(shí)具有短期穩(wěn)定性高、數(shù)據(jù)處理較簡(jiǎn)單、連續(xù)性好、成本較低等特點(diǎn)。
隨著美國(guó)全球定位系統(tǒng)(global positioning system,GPS)的現(xiàn)代化發(fā)展,俄羅斯衛(wèi)星導(dǎo)航系統(tǒng)(GLONASS)的逐步完善,歐盟伽利略衛(wèi)星導(dǎo)航系統(tǒng)(Galileo)的穩(wěn)步推進(jìn)以及我國(guó)北斗三號(hào)的建成,諸多學(xué)者在不同系統(tǒng)GNSS PPP載波相位時(shí)間傳遞領(lǐng)域開(kāi)展了一系列研究工作。Ge等[7]選用CEBR,AGGO,BRUX,KIKU等多個(gè)中低緯度測(cè)站進(jìn)行GLONASS的PPP時(shí)間鏈路傳遞,表明GLONASS的PPP時(shí)間傳遞與GPS/GLONASS PPP時(shí)間傳遞的標(biāo)準(zhǔn)差差值大約為0.4 ns;Zhang等[8]研究了附加先驗(yàn)信息約束的Galileo載波相位時(shí)間傳遞,研究表明長(zhǎng)基線USN8-NTS1鏈路附加先驗(yàn)信息約束結(jié)果的頻率穩(wěn)定度明顯優(yōu)于未加約束的結(jié)果;Qin等[9]在BDS-2,BDS-2+BDS-3,BDS-3 和GPS 系統(tǒng)時(shí)間傳遞頻率穩(wěn)定性上展開(kāi)分析,表明BDS-3在時(shí)間間隔分別為1 000 s,10 000 s和86 400 s時(shí)與GPS系統(tǒng)相比,鏈路穩(wěn)定性的改善幅度分別為22.91%,38.40%和19.03%,與BDS-2 相比改善幅度分別為40.08%,34.06%和10.90%。
但是以上當(dāng)前關(guān)于高精度時(shí)間傳遞性能的研究主要是對(duì)中低緯度地區(qū)的測(cè)站,在高緯度地區(qū)測(cè)站開(kāi)展的研究較少。由于GNSS星座構(gòu)型不同,高緯度地區(qū)可視衛(wèi)星結(jié)構(gòu)也存在較大差異。眾多學(xué)者研究了高緯度地區(qū)不同GNSS精密定位的差異,首先在高緯度地區(qū)衛(wèi)星觀測(cè)數(shù)據(jù)方面,左宗等[10]對(duì)極區(qū)北斗衛(wèi)星數(shù)據(jù)質(zhì)量進(jìn)行了分析,并與中低緯度地區(qū)載波相位觀測(cè)量殘差值對(duì)比,認(rèn)為極地地區(qū)的BDS載波相位觀測(cè)量殘差整體比中低緯度小。除此之外,楊元喜等[11]指出高緯度地區(qū)與中低緯度地區(qū)相比的主要問(wèn)題,雖然具有更多的可視衛(wèi)星,但多數(shù)衛(wèi)星高度角較低,在北緯75°時(shí)衛(wèi)星的最大高度角低于70°,在北緯85°時(shí),衛(wèi)星的最大高度角僅為50°。高緯度地區(qū)在時(shí)間傳遞方面的研究并不多見(jiàn),不同系統(tǒng)之間時(shí)間傳遞性能的差異也尚不清楚,需要進(jìn)行深入研究。
同時(shí),在高緯度地區(qū)衛(wèi)星高度角較低,高度角的合理選擇會(huì)涉及誤差的放大和可視衛(wèi)星增多之間的權(quán)衡問(wèn)題。佘娣等[12]研究表明,對(duì)流層折射誤差隨衛(wèi)星高度角的減小而增加,且當(dāng)衛(wèi)星高度角較小時(shí)誤差急劇增大;丁朋輝等[13]和Beutler等[14]研究了低高度角信號(hào)的截止角選擇對(duì)于可見(jiàn)衛(wèi)星數(shù)、精度衰減因子等的影響。在高緯度地區(qū)合適的截止高度角設(shè)置方面,周潤(rùn)揚(yáng)等[15]研究表明5°是最適合高緯度地區(qū)BDS/GPS定位的截止高度角;任超等[16]分析了低高度角對(duì)提高對(duì)流層估計(jì)精度的影響,并指出當(dāng)截止衛(wèi)星高度角為5°時(shí)對(duì)流層估算精度和高程定位精度更高。因此,有必要分析不同截止高度角對(duì)高緯度地區(qū)GNSS PPP 時(shí)間傳遞性能的影響。
本文主要分析了不同GNSS系統(tǒng)在高緯度地區(qū)的時(shí)間傳遞性能,并根據(jù)高緯度地區(qū)可視衛(wèi)星高度角低的特點(diǎn),對(duì)比分析了5°,10°,15°和20°不同截止高度角條件下不同GNSS系統(tǒng)時(shí)間傳遞鏈路穩(wěn)定性。
1 PPP時(shí)間傳遞原理
GNSS載波相位時(shí)間傳遞方法與衛(wèi)星導(dǎo)航定位中的PPP原理基本相似,但一般會(huì)有外接時(shí)間和頻率的接入,用戶可獲得基于本地時(shí)頻系統(tǒng)提供的高精度時(shí)間標(biāo)準(zhǔn)和頻率標(biāo)準(zhǔn)的偽距和載波相位觀測(cè)值,再結(jié)合國(guó)際GNSS 服務(wù)中心(international GNSS Service,IGS)提供的精密衛(wèi)星軌道和鐘差產(chǎn)品進(jìn)行PPP解算,分別獲得兩地本地參考時(shí)間尺度與IGS參考時(shí)間尺度的差值。
PPP載波相位時(shí)間傳遞采用雙頻無(wú)電離層組合消除電離層一階影響后,其觀測(cè)方程可表示為
式中:s,r,j分別表示衛(wèi)星、接收機(jī)、所采用的頻率;表示無(wú)電離層組合偽距觀測(cè)量、無(wú)電離層組合相位觀測(cè)量;ρ表示衛(wèi)星和測(cè)站之間的幾何距離;δts,δtr表示衛(wèi)星端鐘差和本地接收機(jī)鐘差;Tsr為對(duì)流層延遲誤差;λ為載波相位波長(zhǎng);Nsj表示相位模糊度參數(shù);εP,j,εL,j分別表示偽距和載波觀測(cè)值噪聲。
將觀測(cè)方程(1)線性化,可將未知參數(shù)表示為
式中:X是待估計(jì)參數(shù)矢量,x,y,z為待估計(jì)測(cè)站坐標(biāo)。在參數(shù)求解中,地球潮汐、相對(duì)論效應(yīng)等誤差均使用模型加以改正[17]。
PPP解算出的測(cè)站接收機(jī)鐘差即為本地接收機(jī)時(shí)鐘與參考時(shí)間基準(zhǔn)的偏移量,兩地接收機(jī)鐘差分別為
式中:δtr1,δtr2分別為兩地接收機(jī)鐘差,Tref為參考時(shí)間基準(zhǔn),T1,T2分別為兩地原子鐘的時(shí)間偏移量。
再將得到的接收機(jī)鐘差進(jìn)行差分,得到的兩地時(shí)間傳遞量為
式中:δt1,2為兩地時(shí)間傳遞量,TDelay為兩地接收機(jī)系統(tǒng)的相對(duì)硬件時(shí)延。
高精度時(shí)間傳遞延遲的測(cè)量目前主要有兩種方法:一種是利用參考時(shí)頻傳遞設(shè)備與待校準(zhǔn)時(shí)頻傳遞設(shè)備進(jìn)行共鐘差實(shí)驗(yàn),另一種方法是利用GNSS 信號(hào)模擬器對(duì)時(shí)頻傳遞設(shè)備進(jìn)行絕對(duì)校準(zhǔn)。相關(guān)研究表明,延遲量通過(guò)校準(zhǔn)后相對(duì)穩(wěn)定,因此本文中暫不考慮這部分因素對(duì)時(shí)間傳遞的影響。
2 高緯度地區(qū)時(shí)間傳遞實(shí)驗(yàn)
為對(duì)比分析不同系統(tǒng)(GPS,GLONASS,Galileo,BDS)載波相位時(shí)間傳遞性能,分別選取南緯地區(qū)高緯度測(cè)站OHI3、北緯地區(qū)高緯度測(cè)站YEL2、中心節(jié)點(diǎn)測(cè)站KOUR 三個(gè)測(cè)站,所選測(cè)站均外接氫原子鐘,接收機(jī)初始截止高度角設(shè)置均為零,實(shí)驗(yàn)采用的時(shí)間段為GPS,Galileo,BDS 三個(gè)系統(tǒng)2022年12月9日—2022年12月29日21天數(shù)據(jù),考慮到GLONASS系統(tǒng)在部分時(shí)間段內(nèi)可用衛(wèi)星數(shù)目不足4顆,采用了2022年12月15日—2022年12月20日6天數(shù)據(jù),測(cè)站位置分布如圖1所示,測(cè)試站點(diǎn)配置信息和數(shù)據(jù)處理策略分別見(jiàn)表1和表2。

表1 測(cè)站信息表Tab.1 Station information table

表2 數(shù)據(jù)處理策略Tab.2 Data processing strategy

圖1 實(shí)驗(yàn)所選測(cè)站站點(diǎn)分布圖Fig.1 Distribution map of selected test stations in the experiment
3 衛(wèi)星觀測(cè)數(shù)據(jù)分析
在進(jìn)行PPP時(shí)間傳遞性能評(píng)估之前,先從測(cè)站的衛(wèi)星天空視圖、衛(wèi)星數(shù)、時(shí)間精度因子(time dilution of precision,TDOP)值三個(gè)方面對(duì)觀測(cè)數(shù)據(jù)展開(kāi)分析。
3.1 衛(wèi)星天空?qǐng)D
天空視圖展示的是測(cè)站上觀測(cè)到的所有衛(wèi)星一天的運(yùn)動(dòng)軌跡,實(shí)驗(yàn)中選取的三個(gè)測(cè)站2022 年12月15日的天空視圖如圖2所示。
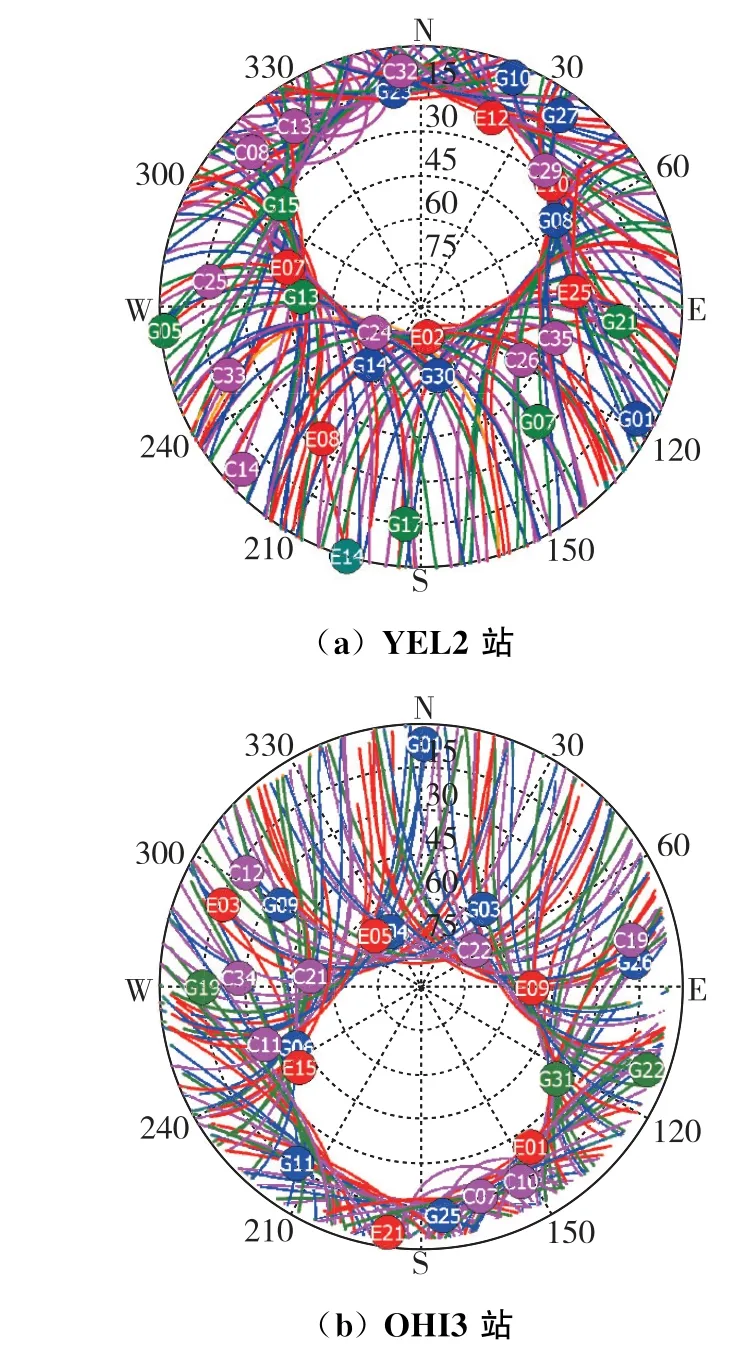
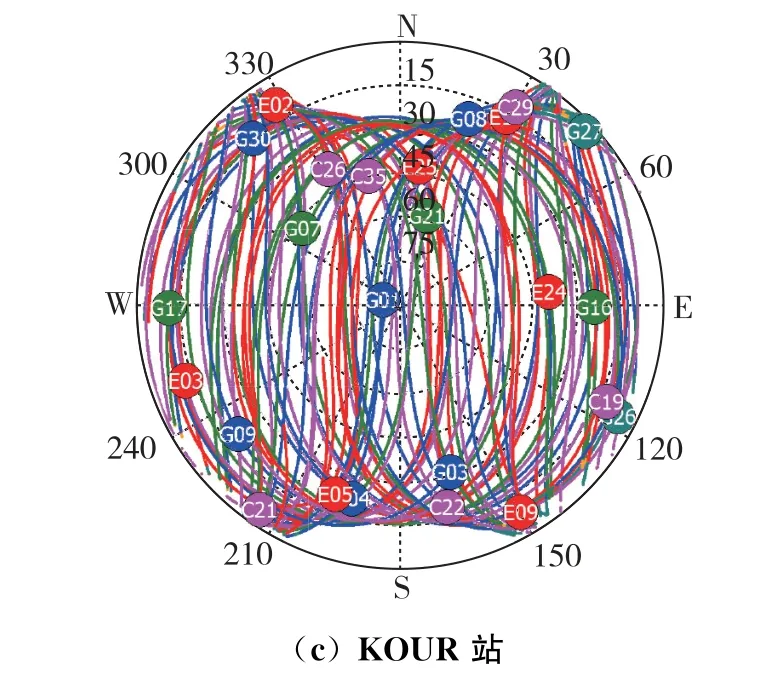
圖2 實(shí)驗(yàn)中選定三個(gè)測(cè)站的衛(wèi)星天空視圖Fig.2 Satellite sky view of three selected stations in the experiment
由圖2可知,從總體上看,三個(gè)測(cè)站觀測(cè)的衛(wèi)星數(shù)目均較多,且當(dāng)高度角較低時(shí),仍有較好的衛(wèi)星可見(jiàn)性。
從具體上看,中低緯度地區(qū)KOUR 測(cè)站除了觀測(cè)不到南北兩極的衛(wèi)星外,在其余方位都能收到較多的衛(wèi)星,且衛(wèi)星高度角都較高,沒(méi)有低于30°高度角的衛(wèi)星。相比之下,南半球高緯度地區(qū)OHI3測(cè)站在南部大高度角可視衛(wèi)星較少,多數(shù)衛(wèi)星高度角在30°以內(nèi),各個(gè)系統(tǒng)可視衛(wèi)星數(shù)均較多,且在不同方位區(qū)域衛(wèi)星分布均勻;北半球高緯度地區(qū)YEL2站在北部的可見(jiàn)衛(wèi)星數(shù)較少,且衛(wèi)星高度角較低,但整體不同方位區(qū)域衛(wèi)星分布仍較為均勻。
由以上天空視圖可看出,高緯度地區(qū)和中低緯度地區(qū)測(cè)站的可視衛(wèi)星分布有很大差異,為進(jìn)一步分析差異,3.2節(jié)對(duì)高緯度地區(qū)的衛(wèi)星數(shù)及TDOP值展開(kāi)研究。
3.2 可用衛(wèi)星數(shù)與TDOP值
在GNSS中常用精度衰減因子(dilution of precision,DOP)值描述衛(wèi)星的空間幾何構(gòu)型。根據(jù)所表征特性不同,DOP值又分為定位精度因子(position dilution of precision,PDOP)、垂直精度因子(vertical dilution of precision,VDOP)、水平精度因子(horizontal dilution of precision,HDOP)、時(shí)間精度因子(TDOP)等。PPP精密時(shí)間傳遞中衛(wèi)星的數(shù)目和空間分布對(duì)于接收機(jī)鐘差的影響常用TDOP衡量,因此重點(diǎn)對(duì)影響其時(shí)間傳遞精度的TDOP進(jìn)行分析。
因每天觀測(cè)得出的衛(wèi)星數(shù)、TDOP 值變化相差不大,為了便于展示衛(wèi)星數(shù)在不同歷元的變化情況,圖3和圖4 給出了截止高度角為10°時(shí),OHI3和YEL2測(cè)站在2022年12月15日一天內(nèi)各系統(tǒng)觀測(cè)的衛(wèi)星數(shù)量、TDOP值變化情況,表3和4統(tǒng)計(jì)了OHI3,YEL2測(cè)站GPS,Galileo,BDS系統(tǒng)2022年12月9日—2022年12月29日21天的不同截止高度角下的衛(wèi)星數(shù)、TDOP 的平均值,GLONASS系統(tǒng)2022年12月15日—2022年12月20日6天的不同截止高度角下的衛(wèi)星數(shù)、TDOP 的平均值。由圖3可以看出,當(dāng)截止高度角為10°時(shí),各系統(tǒng)觀測(cè)的衛(wèi)星數(shù)均大于4 顆,可進(jìn)行PPP 解算。其中GPS的衛(wèi)星數(shù)目較多,可用衛(wèi)星數(shù)大約為7~12顆,Galileo系統(tǒng)的衛(wèi)星數(shù)略低于GPS,在6~9顆左右。同時(shí)可以看出OHI3站北斗的衛(wèi)星數(shù)歷元間變化較大,在一天內(nèi)最少為6顆,最多為14顆。YEL2站北斗的觀測(cè)數(shù)目大約在5~13顆,歷元間的衛(wèi)星數(shù)目仍變化較大。各個(gè)測(cè)站的GLONASS 系統(tǒng)衛(wèi)星數(shù)大多在4~8顆,均低于其他系統(tǒng)。且由圖3和圖4可以看出,高緯度測(cè)站的TDOP值在部分歷元明顯高于其他歷元,因?yàn)樵谠摎v元參與解算的衛(wèi)星數(shù)較少,部分歷元衛(wèi)星數(shù)僅有4顆,此時(shí)衛(wèi)星幾何構(gòu)型較差,TDOP值出現(xiàn)大幅度抖動(dòng)。

表3 OHI3測(cè)站不同系統(tǒng)衛(wèi)星數(shù)、TDOP均值Tab.3 Number of satellites and TDOP mean of different systems at OHI3 station

圖3 OHI3測(cè)站不同系統(tǒng)一天內(nèi)的衛(wèi)星數(shù)、TDOP值Fig.3 Number of satellites and TDOP values in a day for different systems of OHI3 station

圖4 YEL2測(cè)站不同系統(tǒng)一天內(nèi)的衛(wèi)星數(shù)、TDOP值Fig.4 Number of satellites and TDOP values in a day for different systems of YEL2 station
結(jié)合表3和表4可以看出,當(dāng)截止高度角為5°時(shí),衛(wèi)星幾何構(gòu)型良好。截止高度角從5°升為10°,15°時(shí),TDOP值衰減不大;但當(dāng)截止高度角升為20°時(shí),測(cè)站的TDOP值有較大衰減。

表4 YEL2測(cè)站不同系統(tǒng)衛(wèi)星數(shù)、TDOP均值Tab.4 Number of satellites and TDOP mean of different systems at YEL2 station
分析表3和表4可得,對(duì)于GPS系統(tǒng),在OHI3測(cè)站,5°,10°,15°和20°截止高度角下平均衛(wèi)星數(shù)分別降低了10.10%,13.74%,16.04%,TDOP 分別衰減了27.16%,37.86%,43.66%。5°,10°,15°和20°截止高度角下YEL2測(cè)站的平均衛(wèi)星數(shù)分別降低了11.80%,15.57%,15.84%,TDOP 分別衰減了27.63%,42.27%,34.78%。
結(jié)合圖3、圖4 和表3、表4 可以看出,測(cè)站OHI3和YEL2可用衛(wèi)星數(shù)較多時(shí),TDOP值較小,衛(wèi)星的空間幾何構(gòu)型更好,當(dāng)提升截止高度角,衛(wèi)星數(shù)降為4~5顆時(shí),TDOP值大幅衰減,此時(shí)衛(wèi)星幾何構(gòu)型較差。在一天內(nèi),測(cè)站OHI3和YEL2的GPS,GALILEO,BDS系統(tǒng)TDOP 值均相對(duì)較小,根據(jù)DOP優(yōu)劣等級(jí)標(biāo)準(zhǔn),為優(yōu)等,但GLONASS系統(tǒng)的TDOP值某些歷元存在較大的跳變,幾何構(gòu)型不太穩(wěn)定。
4 性能評(píng)估
4.1 頻率穩(wěn)定表征方法
Allan方差是常用的頻率穩(wěn)定度的表征方法。為評(píng)估PPP時(shí)間傳遞鏈路的頻率穩(wěn)定度,本文采用Allan方差進(jìn)行評(píng)估。其表達(dá)式為
式中:δy(τ)表示計(jì)算得出的Allan方差的平方根;τ為采樣間隔,τ=nτ0,其中τ0為原始序列采樣間隔,其中τ0=30 s;N為觀測(cè)時(shí)間序列的總歷元數(shù);i表示第i個(gè)歷元,Ti為該歷元的鐘差解;m表示平滑因子。
4.2 衛(wèi)星導(dǎo)航系統(tǒng)時(shí)間傳遞穩(wěn)定度對(duì)比
GPS,GALILEO,GLONASS,BDS 的PPP 時(shí)間傳遞原理雖基本相似,但因每個(gè)系統(tǒng)的信號(hào)體制、衛(wèi)星分布等有所不同,其時(shí)間傳遞性能也有所差異,為從頻率穩(wěn)定度的角度評(píng)價(jià)PPP時(shí)間傳遞的精度,使用Allan 方差分析OHI3-KOUR,YEL2-KOUR 兩條時(shí)間傳遞鏈路的時(shí)差。
圖5 給出了不同系統(tǒng)PPP 計(jì)算的OHI3-KOUR,YEL2-KOUR 時(shí)差的時(shí)間序列。可以看出,在不同系統(tǒng)鏈路時(shí)差的時(shí)間序列變化比較一致,在YEL2測(cè)站GPS,Galileo,BDS系統(tǒng)下的時(shí)間序列相比于GLONASS穩(wěn)定性更好。在OHI3測(cè)站,四系統(tǒng)的時(shí)差序列穩(wěn)健性差異不大,各個(gè)系統(tǒng)的時(shí)間序列變化趨勢(shì)仍比較一致。

圖5 不同GNSS系統(tǒng)求解的時(shí)差序列Fig.5 Time difference sequence solved by different GNSSsystems
圖6給出了不同系統(tǒng)獲取的時(shí)間傳遞鏈路Allan方差對(duì)比情況,由圖可以看出,在高緯度地區(qū),不同系統(tǒng)獲取的時(shí)間傳遞鏈路Allan方差曲線趨勢(shì)基本相似,Galileo穩(wěn)定度相較于其他系統(tǒng)穩(wěn)定性更好,GPS和BDS次之,GLONASS表現(xiàn)較不穩(wěn)定。

圖6 不同系統(tǒng)獲取的時(shí)間傳遞鏈路Allan方差對(duì)比Fig.6 Comparison of Allan variances of time transfer links obtained by different systems
結(jié)合圖5、圖6和表3、表4得出,GLONASS系統(tǒng)相較于其他三個(gè)系統(tǒng)穩(wěn)定度較差,這與其較少的可用衛(wèi)星和衛(wèi)星間較差的幾何構(gòu)型有一定關(guān)系。GPS和Galileo在多系統(tǒng)的高緯度時(shí)間鏈路傳遞的過(guò)程中穩(wěn)定度相對(duì)較好,BDS 的穩(wěn)定度略差于GPS 和Galileo,GLONASS穩(wěn)定度最差,其原因是GLONASS系統(tǒng)在衛(wèi)星觀測(cè)數(shù)及衛(wèi)星幾何構(gòu)型、衛(wèi)星鐘差和軌道精度、頻間偏差(inter frequency bias,IFB)等因素。
4.3 不同截止高度角下穩(wěn)定性評(píng)估
在高緯度地區(qū),衛(wèi)星與接收機(jī)之間的高度角普遍偏低,低高度角對(duì)精密時(shí)間傳遞當(dāng)中的對(duì)流層延遲影響較大,降低衛(wèi)星的截止高度角可以增加觀測(cè)冗余,提高可視衛(wèi)星的個(gè)數(shù)和延長(zhǎng)衛(wèi)星可視時(shí)間。但過(guò)低的截止高度角又會(huì)導(dǎo)致較為嚴(yán)重的多路徑效應(yīng)和大氣傳播延遲,加大噪聲,使觀測(cè)誤差增加,因此本文分析了不同截止高度角下各時(shí)間傳遞鏈路的穩(wěn)定性,并分析探討上述雙向作用下的截止衛(wèi)星高度角的最佳選擇。圖7和圖8分別給出了不同截止高度角條件下不同GNSS 系統(tǒng)獲取的OHI3-KOUR,YEL2-KOUR時(shí)間傳遞鏈路的Allan方差。

圖7 不同截止高度角條件下不同GNSS系統(tǒng)獲取的OHI3-KOUR 時(shí)間傳遞鏈路Allan方差對(duì)比Fig.7 Comparison of Allan variance of OHI3-KOUR time transfer link obtained by different GNSS systems under different cutoff altitude angles
由圖7 可以看出,在OHI3-KOUR 時(shí)間鏈路中,GPS,Galileo,BDS截止高度角由5°增加至10°、10°增加至15°的過(guò)程中,Allan方差隨截止高度角的增加并未出現(xiàn)明顯變化;Galileo,BDS 系統(tǒng)在截止高度角由15°增加至20°的過(guò)程中,穩(wěn)定性均明顯降低。GLONASS 系統(tǒng)在截止高度角由5°增加至10°、10°增加至15°、15°增加至20°的過(guò)程中,時(shí)間傳遞鏈路穩(wěn)定度均有明顯變化,穩(wěn)定性逐漸降低。
由圖8 可以看出,在YEL2-KOUR 時(shí)間鏈路中,不同GNSS系統(tǒng)在截止高度角由5°增加至10°、10°增加至15°的過(guò)程中,Allan方差變化與OHI3-KOUR 時(shí)間鏈路相同,但在截止高度角由15°增加至20°的過(guò)程中,GPS,Galileo系統(tǒng)穩(wěn)定度沒(méi)有明顯變化,BDS系統(tǒng)穩(wěn)定度降低程度相對(duì)較小,GLONASS系統(tǒng)的穩(wěn)定度降低仍相對(duì)最大。
結(jié)合表3、表4與圖7、圖8分析可得,在5°截止高度角下,擁有更多的可用衛(wèi)星數(shù),時(shí)間傳遞的穩(wěn)定性也更好。當(dāng)截止高度角由5°增加為10°時(shí),從可用衛(wèi)星數(shù)和TDOP值上看,YEL2測(cè)站GPS系統(tǒng)可用衛(wèi)星數(shù)從10.85 降為9.57,平均TDOP 值從0.76衰減至0.97,仍有較多的可用衛(wèi)星和較為良好的衛(wèi)星幾何構(gòu)型,因此Allan方差隨截止高度角的增加并未出現(xiàn)明顯變化。當(dāng)截止高度角由10°增加至15°時(shí),不同測(cè)站上的衛(wèi)星數(shù)目、TDOP值沒(méi)有發(fā)生較大變化,因此不同系統(tǒng)的時(shí)間傳遞鏈路的穩(wěn)定性未發(fā)生顯著變化。當(dāng)截止高度角增加為20°時(shí),由表3和表4可以看出,平均TDOP值明顯升高,部分歷元的可用衛(wèi)星數(shù)僅有4顆,幾何構(gòu)型的穩(wěn)定性很差,因此不同系統(tǒng)的時(shí)間傳遞鏈路穩(wěn)定度明顯降低。
從截止高度角在15°~20°變化對(duì)時(shí)間鏈路穩(wěn)定性的影響上看,在高緯度地區(qū)截止高度角的升高對(duì)GPS,Galileo系統(tǒng)的影響較小,對(duì)GLONASS,BDS系統(tǒng)的影響較大。但從截止高度角從5°到20°的變化當(dāng)中,同樣對(duì)GPS,Galileo 系統(tǒng)的影響較小,對(duì)GLONASS系統(tǒng)的影響最大。結(jié)合圖5和圖6中的Allan方差曲線可以得出:在高緯度地區(qū),GPS,Galileo系統(tǒng)的性能相對(duì)較好,GLONASS系統(tǒng)的性能相對(duì)最差。
從前面的分析可以得出,時(shí)間傳遞鏈路的穩(wěn)定性隨截止高度角的升高而降低,在高緯度地區(qū)進(jìn)行時(shí)間傳遞時(shí)建議選擇5°截止高度角。
5 結(jié)論
本文研究了GNSS載波相位時(shí)間傳遞理論,選擇中低緯度和高緯度地區(qū)的典型GNSS 測(cè)站進(jìn)行實(shí)驗(yàn),對(duì)其可視衛(wèi)星數(shù)、TDOP 值和不同GNSS 在高緯度地區(qū)的時(shí)間傳遞性能進(jìn)行了分析,得出的主要結(jié)論如下:
1)相較于中低緯度地區(qū),高緯度地區(qū)測(cè)站衛(wèi)星高度角相對(duì)較低,缺少大高度角衛(wèi)星,但仍然擁有較多的可視衛(wèi)星,TDOP 值較小,衛(wèi)星的空間幾何構(gòu)型較好。其中GPS,Galileo,BDS 系統(tǒng)的可用衛(wèi)星數(shù)大多在8~12顆,衛(wèi)星幾何強(qiáng)度也較為穩(wěn)定。GLONASS 系統(tǒng)部分歷元的衛(wèi)星數(shù)僅有4 顆,TDOP值有較大跳變,幾何構(gòu)型相對(duì)較差。
2)從不同系統(tǒng)來(lái)看,高緯度地區(qū)GPS,Galileo,BDS系統(tǒng)的時(shí)間傳遞鏈路穩(wěn)定度差異不大,Galileo最優(yōu),GLONASS系統(tǒng)的穩(wěn)定性相對(duì)較差。此外,當(dāng)截止高度角由5°增加為10°和15°時(shí),TDOP值變化不大,因此,鏈路穩(wěn)定性變化不大;但增加為20°時(shí),TDOP值衰減明顯,其鏈路穩(wěn)定性也明顯變差。
3)為了擁有更多的可用衛(wèi)星數(shù),增加衛(wèi)星幾何分布強(qiáng)度,保證更好的時(shí)間傳遞鏈路穩(wěn)定度,在高緯度地區(qū)進(jìn)行時(shí)間傳遞時(shí)截止高度角建議設(shè)置為5°。
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
制造技術(shù)與機(jī)床(2019年10期)2019-10-26 02:47:06
中國(guó)洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
鐵道通信信號(hào)(2018年5期)2018-06-28 03:06:24
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
知識(shí)經(jīng)濟(jì)·中國(guó)直銷(xiāo)(2017年5期)2017-06-15 20:28:19
通信電源技術(shù)(2016年6期)2016-04-20 06:21:32
